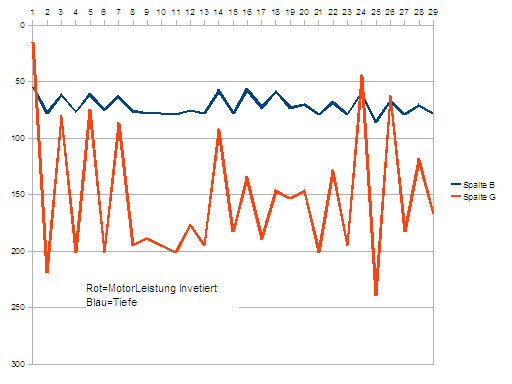
Ich habe mein ROV (mini u-boot) mit einem Digital P-Regler für die Tiefe ausgestattet. Das ROV sendet jede 1s die Tiefe an den PC dann wird - Leistung der Motoren berechenet(p-regler Kp=6) - dann zurück zum ROV. Das ROV taucht auf die Richtige Tiefe führ aber immer noch kleine Schwingungen um den Sollwert aus. (siehe Anhang) Lässt sich das ganze optimieren? (klar!) aber wie? Ist ein PI-Regler das richtige? Denn wenn ich richtig verstanden habe wirkt das ROV schon als I-Anteil. Das ROV www.michi.fischundpartner.ch
Angehängte Dateien:
-

TiefenRegler.png
5,2 KB
Hallo Michi, als erstes würde ich die Samplingrate viel schneller als 1 Sekunde einstellen, also vielleicht auf 50 ms. Erst, wenn die Messwerte im eingeschwungenen Zustand keine auffallenden Knicke mehr aufweisen, macht ein PID-Regler Sinn. Dann würde ich einfach nach einer heuristischen Methode den Regler abgleichen. Ein D-Anteil kann hier durchaus Sinn machen, denn das Boot hat ja eine Trägheit, die sich dadurch bedämpfen lässt. Grüße, Peter
1s ist wahrscheinlich zu langsam. Wie stark rauscht dein Tiefensensor? PID Regler verwenden (D nur falls "wenig" Rauschen) Bei viel Rauschen evtl Filter oder Oversampling verwenden. Mit Hydrodynamik kenne ich mich nicht aus, aber ein I-Verhalten des Bootes hört sich relativ plausibel an - falls das Boot keinen oder kaum Auf oder Abtrieb erzeugt. I Anteil kann man weglassen, falls es wenig Störungen gibt. z.B. Strömung die das Boot nach unten zieht, statischer Auftrieb oder das Boot erzeugt beim Fahren ein dynamischen Auf oder Abtrieb.
Danke für di Infos 50ms Sampling wird technisch nicht möglich sein (langsames Prog. im uP) aber ein bisschen schneller gehts noch. Kein rauschen auf dem Sensor. Boot ist leicht Positiv-getrimmt. Getaucht wird mit Motorenleistung Aufsteigen nur mit Auftrieb (kein MotorAntrieb)! Noch wichtig im Diagramm entspricht ein Sample 10s // und nicht wie man annehmen würde 1s... Zum Abgleich des Reglers: Zuerst den P-Wert verringern bis keine Schwingungen mehr auftretet und dann D-Anteil zufügen?
In was für einem Gewässer testest du dein Uboot - evtl gibt es Störungen durch Strömungen oder so. Mögliche Ursachen Wie misst du die Tiefe - in der Mitte des Bootes? Laut Bild verwendest du 2 Motoren für den Abtrieb - evtl erzeugen beide unterschiedliche Kräfte. Prinzipiell: Du kannst es mit "Einstellregeln" versuchen, aber es ist wahrscheinlich schwierig. D-Anteil einfach ausprobieren - evtl P verringern und gleichzeitig D "hochdrehen".
Kannst du die Software in dem Mikrocontroller nicht verbessern, so dass eine höhere Samplingrate möglich ist? Wenn du an dem Tiefensollwert deines momentanen Reglers einen Sollwertsprung anlegst (z.B. spungartig 10 cm tiefer), kannst du das Regelverhalten beobachten und empirisch optimieren. Kennst du den Wikipedia-Beitrag dazu schon: http://de.wikipedia.org/wiki/Faustformelverfahren_(Automatisierungstechnik) Der Absatz "Empirische Dimensionierung" (ganz unten) sollte für dein Problem leicht umsetzbar sein. Grüße, Peter
Besten dank für die Hilfe Hab heut mal ein PD Regler "eingebaut" ich glaube das scheint zu helfen (leider waren gerade die Batterien leer!) Ich glaube das durch die hohe Trägheit des Bootes gar keine Vernünftige Regelung mit nur einem P-regler möglich ist?? Die Feineinstellungen folgen.
Bitte melde dich an um einen Beitrag zu schreiben. Anmeldung ist kostenlos und dauert nur eine Minute.
Bestehender Account
Schon ein Account bei Google/GoogleMail? Keine Anmeldung erforderlich!
Mit Google-Account einloggen
Mit Google-Account einloggen
Noch kein Account? Hier anmelden.