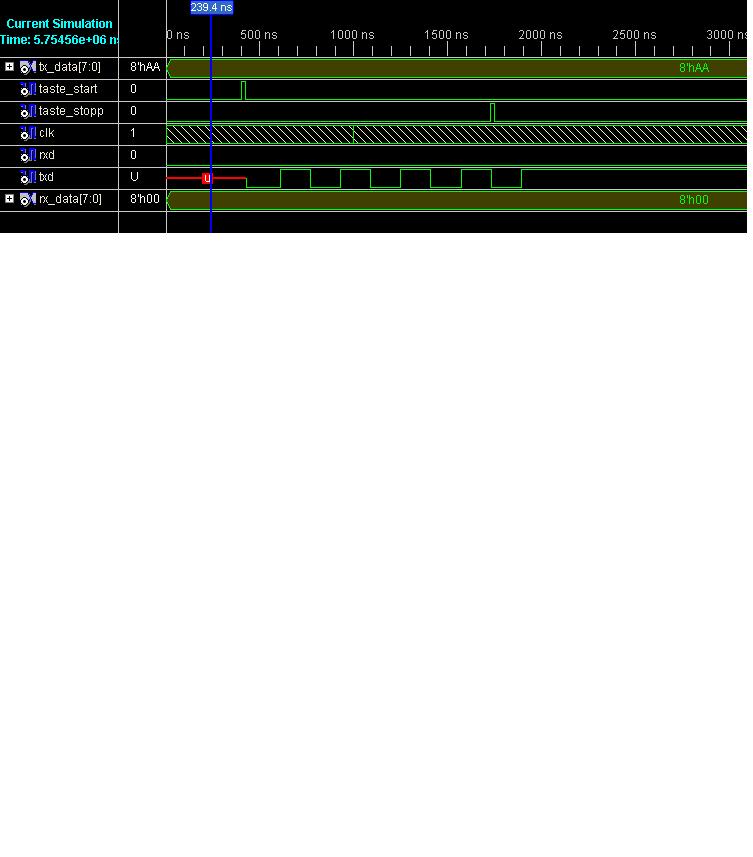
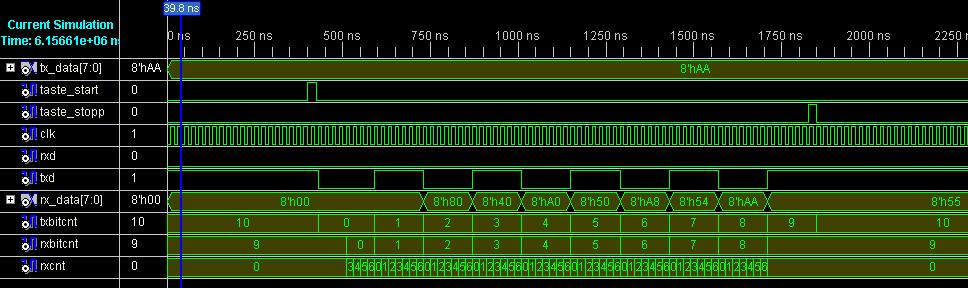
Hallo, ich habe eine von microcontroller.net verlinke UART folgendermaßen leicht verändert: Das MSB wird zuerst gesendet. (siehe Beispiel x"AA") Das Klappt so weit. Aber der Empgang funktionert nicht. Könnte mir jemand sagen woran es liegt?
Angehängte Dateien:
-

Simulation.JPG
49 KB
Weil txd_tmp immer '1' ist.
1 | TXD <= txsr(txsr'left); |
2 | txd_tmp <= txsr(0); |
3 | :
|
4 | txsr <= txsr(txsr'left-1 downto 1) & '1'; |
5 | :
|
6 | rxd_sr <= rxd_sr(rxd_sr'left-1 downto 0) & txd_tmp; |
Du taktest immer nur eine '1' in den Empfänger hinein...
Angehängte Dateien:
-

Simulation1.JPG
66 KB
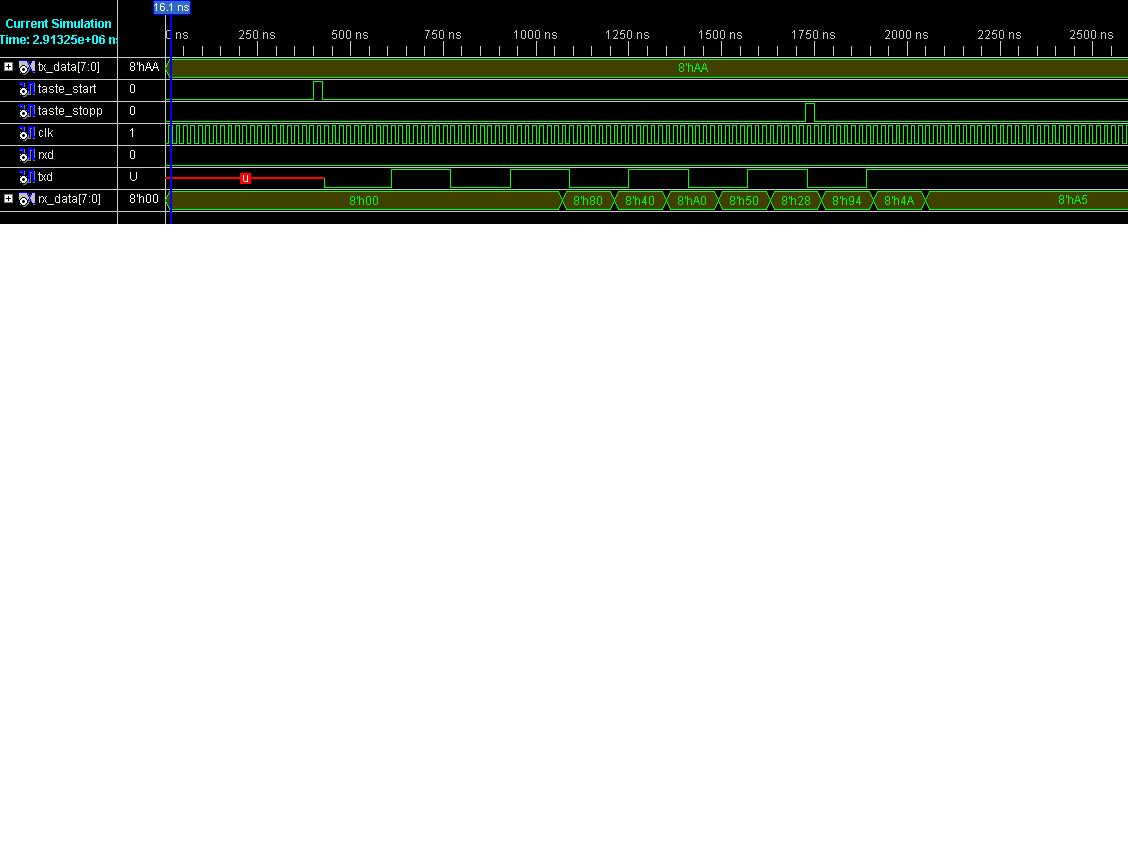
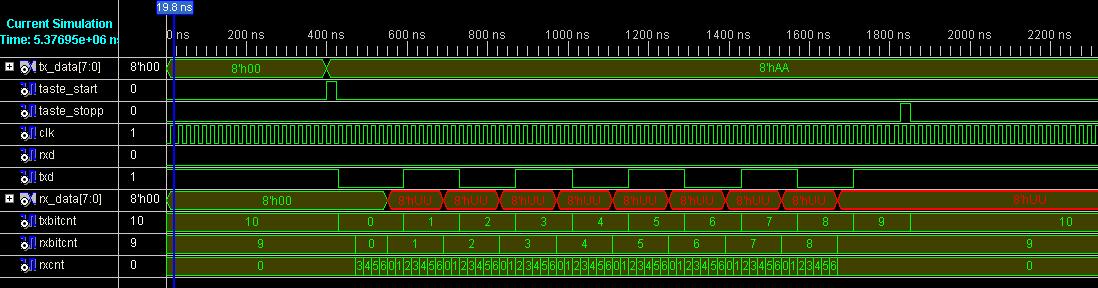
Ich habe es jetzt so umgeschrieben: TXD <= txsr(txsr'left); txd_tmp <= txsr(txsr'left); Das Ergebnis sieht folgendmaßen aus(s. Anhang) Wo liegt jetzt noch der Fehler? Warum fängt der Empfang erst beim 4.Bit an und müsste es nicht in der Bitmitte sein?
U.A. weil die erste fallende Flanke nicht erkannt werden kann:
1 | :
|
2 | if (rxd_sr(3 downto 2) = "10") then -- fallende Flanke Startbit |
3 | :
|
Denn die geht ja von 'U' nach '0'... :-o Sieh dir auch mal die internen Signale an: txbitcnt und rxbitcnt BTW: Irgendwie scheint mir der Empfänger (bezogen auf den Sender) mit einer falschen Baudrate zu laufen... :-/
Angehängte Dateien:
-

Simulation4.JPG
73 KB
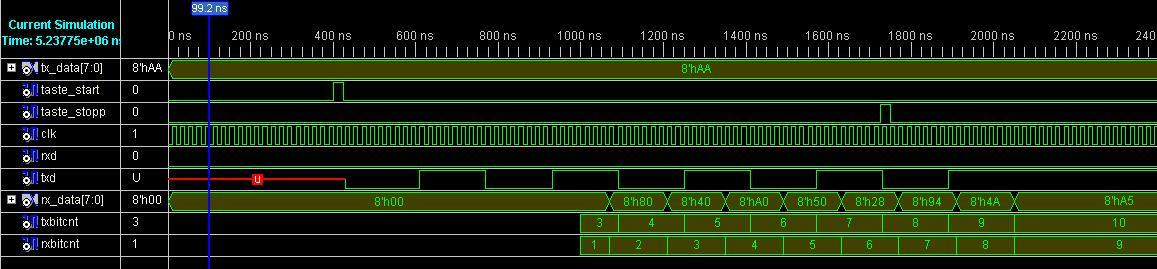
habe die flankenerkennung auf "01" gesetzt, sieht jetzt etwas besser
aus:
if (rxd_sr(3 downto 2) = "01") then
Aber noch nicht 100%!?
> if (rxd_sr(3 downto 2) = "01") then
Du strocherst aber arg im Trüben... :-/
Kurz und gut: Das Startbit ist eine fallende Flanke.
Dein Problem ist, dass eine Flanke von 'U' nach '0' eben gerade
keine fallende Flanke ist (ich meine, so was schon mal geschrieben zu
haben...).
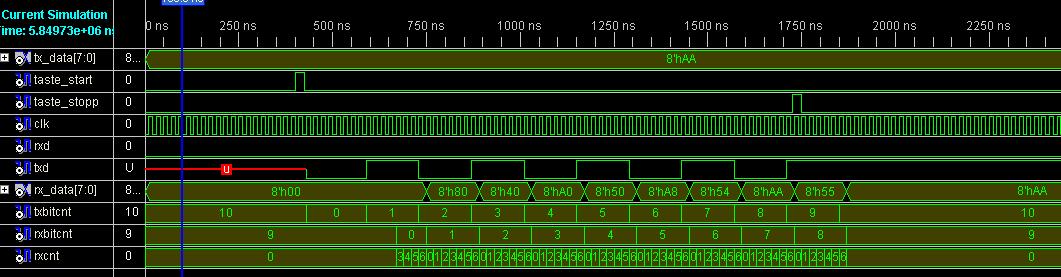
Initialisiere doch einfach mal das txsr mit dem Ruhepegel:
signal txsr : std_logic_vector (9 downto 0) := (others=>'1');
Angehängte Dateien:
-

Simulation4.JPG
67 KB
Mit angehängtem Quellcode "UART.vhd" habe ich jetzt das das Ergebnis "Simulation4.jpeg". Es sieht fast gut aus. Nur gibt es denke ich noch das Problem mit der Abtastung in dr Bitmitte. Wieso ist diese aber auch unbegint notwendig? Und es wird irgendwarum erst die die zweite negative Flanke erkannt!? Gruß
> Nur gibt es denke ich noch das Problem mit der Abtastung in dr Bitmitte.
Als Tipp: das rxd_sr bringt dir 4 Takte Latency.
Mach das mal kürzer:1 | signal rxd_sr : std_logic_vector (1 downto 0) := "11"; -- Flankenerkennung und Eintakten |
2 | :
|
3 | rxsr <= rxd_sr(rxd_sr'left-1) & rxsr(1); -- rechts schieben, weil LSB first |
4 | :
|
5 | if (rxd_sr = "10") then -- fallende Flanke Startbit |
> ... Abtastung in dr Bitmitte. Wieso ist diese unbegint notwendig?
Stell dir mal vor, der Sender sendet mit 3% Fehler (z.B. 9900Bits/sec
statt mit 9600Bits/sec). Kannst du dir jetzt vorstellen, welchen Vorteil
die Abtastung in der Bitmitte hat?
Angehängte Dateien:
-

Simulation5.JPG
74 KB
Das Resultat ist dieses. (siehe Anhang) Der Sender ist in meinem Fall ja eine UART in einem FPGA-implementiert. Un dwird zu Testzwecken auch nur so mit einer konstanten Baudrate versendet. Da kann ich doch mit einer Fehlerrate von nahezu 0% rechnen!? Für die Praxis ist das natürlich sinnvoll. Warum zählt txbitcnt eigentlich bis 10 es sind ja keine 11Bit pro Frame?
> Das Resultat ist dieses. (siehe Anhang) Der Abtastzeitpunkt ist schon besser. Jetzt kontrollierst du noch, weshalb du lauter 'U' eintaktest, dann bist du fertig. > Warum zählt txbitcnt eigentlich bis 10 Hmm... weil es so beschrieben ist? :-/ Ganz einfach: während txbitcnt=0..9 werden Bits übertragen (1 Startbit, 8 Datenbits, 1 Stopbit). txbitcnt=10 ist der Ruhezustand des Senders.
> Jetzt kontrollierst du noch, > weshalb du lauter 'U' eintaktest, dann bist du fertig. Meines Erachtens nach werden keine 'U' eingetaktet. Gesendet wird ja kein 'U' und dasselbe Signal wird auch eingetaktet.
Ich habe das mal früher so gelöst: Meine Lösung basierte auf einem
Multiplexer. Und einem Counter. Durch den Countervergleich gibt der
Multiplexer immer das entsprechende Bit an den Ausgang weiter. Das Start
und Stopbit erzeuge ich so gleich automatisch mit. Das Mit dem Counter
muß noch mal üßberprüft werden, habe das mal schnell gemacht. Ich weiß
das die Lösung mit dem Schieberegister sicherlich schneller geht. Dies
ist jedoch mal ein anderer Ansatz.
if(CLK_RS232'event and CLK_RS232 = '0')then
if(CLR = '1')then
TXD <= '1';
elsif(S_START_OUTPUT = '1')then
case S_COUNTER is
when "0000" => TXD <= '0';
when "0001" => TXD <= S_OUTPUT_BUFFER(0);
when "0010" => TXD <= S_OUTPUT_BUFFER(1);
when "0011" => TXD <= S_OUTPUT_BUFFER(2);
when "0100" => TXD <= S_OUTPUT_BUFFER(3);
when "0101" => TXD <= S_OUTPUT_BUFFER(4);
when "0110" => TXD <= S_OUTPUT_BUFFER(5);
when "0111" => TXD <= S_OUTPUT_BUFFER(6);
when "1000" => TXD <= S_OUTPUT_BUFFER(7);
when "1001" => TXD <= '1';
when others => NULL;
end case;
else
TXD <= '1';
end if;
end if;
end process;
if(CLK_RS232'event and CLK_RS232 = '0')then
if(CLR = '1')then
S_START_OUTPUT<= '0';
S_COUNTER <= "0000";
elsif(START = '1')then
S_START_OUTPUT<= '1';
S_COUNTER <= S_COUNTER + 1;
end if;
end if;
Aus meiner Sicht ist es immer wichtig einen syncronen Reset einzubauen, damit es nicht zu undefinierten Zuständen kommen kann.Somit hat man auch mal die Möglichkeit sich neu zu syncronisieren.
Dies Variante habe ich auch schon auspropiert. Klappt auch gut. Das ist ja aber nur der Sender. Der funktioniert bereits. Es geht hier um den Empänger!!! H.H.
Nochmal zum Thema zurück:
> Jetzt kontrollierst du noch, weshalb du lauter 'U' eintaktest, dann bist > du
fertig.
Meines Erachtens nach werden keine 'U' eingetaktet. Gesendet wird ja
kein 'U' und dasselbe Signal wird auch eingetaktet.
> Aus meiner Sicht ist es immer wichtig einen syncronen Reset einzubauen, > damit es nicht zu undefinierten Zuständen kommen kann. Ein "wirklicher" Reset sind nur sehr selten nötig. Oft braucht den der Entwickler nur für seinen Reset-Taster. Dazu gibt es ein schönes Paper von Xilinx: http://www.xilinx.com/support/documentation/white_papers/wp272.pdf Fazit: When creating each section of a design, simply ask, “Does this bit need to be reset”? > Meines Erachtens nach werden keine 'U' eingetaktet. Die Simulation sagt was anderes :-o
> Die Simulation sagt was anderes :-o
Ich verstehe nicht es nicht.
wenn ich die Parameter ändere wie du es vorgeshclagen hast:
signal rxd_sr : std_logic_vector (1 downto 0) := "11"; --
Flankenerkennung und Eintakten
:
rxsr <= rxd_sr(rxd_sr'left-1) & rxsr(1); -- rechts schieben, weil
LSB first
:
if (rxd_sr = "10") then -- fallende Flanke Startbit
...dann erhalte ich für das eintakten 'U', wenn es auf die
Ursprünglichen Werte gesetzt wird. ist die Abtastung zwar nicht in der
Mitte, aber kein 'U'!
Ich habe keine Ahnung woran es jetzt liegt!???????
"Mitdenken!" sagte der Meister zum Stift :-/ Probier mal statt:
1 | rxd_sr <= rxd_sr(rxd_sr'left-1 downto 0) & txd_tmp; |
das da:
1 | rxd_sr <= rxd_sr(0) & txd_tmp; |
Und wenn das nichts hilft, hindert dich keiner, in der simulation mal das rxd_sr genauer anzuschauen...
Warum habe ich hier nur
>"Mitdenken!" sagte der Meister zum Shift
gelesen? ;-)
Duke
Angehängte Dateien:
-

Simulation6.JPG
84 KB

> Und wenn das nichts hilft, hindert dich keiner, in der simulation mal > das rxd_sr genauer anzuschauen... Es scheinst sich mit rxd_sr <= rxd_sr(0) & txd_tmp; irgendwie nichts zu tun...
rxd_sr sieht doch gut aus... Da ist der Fehler: rxsr <= rxd_sr(rxd_sr'left-1) & rxsr(1); Du schiebst in die falsche Richtung. Probier mal: rxsr <= rxd_sr(1) & rxsr(rxsr'left downto 1); -- rechts schieben, weil LSB first Bitte nicht einfach Copy-Paste machen und alle Fehler mitkopieren... :-/
Angehängte Dateien:
-

Simulation7.JPG
130 KB

Habe
> rxsr <= rxd_sr(1) & rxsr(rxsr'left downto 1);
probiert. Es funktiont ab dem zweiten Frame!
Es müsste so auch in Ordung sein, da ich sowieso eine Endlosschleife
habe.
Angehängte Dateien:
-

Simulation8.JPG
96 KB

Noch eine Modifikation:
letztendlich soll bei
Generic ( Quarz_Taktfrequenz : integer := 50000000; --Hertz
Baudrate : integer := 12000000 -- Bits/S
);
empfangenwerden
Es funktioniert zwar noch, aber selbst beim 2. Frame ist die Abtastung
nicht wie im vorigen Bild "Simulation7" etwa in der Mitte. Sie es
rutscht dann richtung nächstes Bit.
Kann man da was machen
> Kann man da was machen
Wenn du unbedingt (selber schuld) diese Geschwindigkeit asynchron
fahren willst, und damit zufrieden bist, dass die simulation schön
aussieht, dann solltest du hier was machen:1 | rxcnt <= ((Quarz_Taktfrequenz/Baudrate)-1)/2; -- erst mal nur halbe Bitzeit abwarten |
Probiers mal so:
1 | rxcnt <= 2; -- erst mal nur halbe Bitzeit abwarten |
Nimm eine vernünftige Baudrate. 12MBit/s sind zu schnell für eine RS232 Schnitte. Hier solltest du dir ein sinnvolles Interface aussuchen. Z.B. ein synchrones Interface wie SPI. Wenns unbedingt asynchron sein soll, dann mit Manchester-Codierung, damit pro Bit wieder aufsynchronisiert werden kann.
beim Syntaxcheck ist jetzt doch noch ein Fehler aufgetreten der für die Simulation scheinbar keine Rolle gespielt hat: Line 113. Size of concat operation is different than size of the target. Er bezieht aich auf diese Zeile im Sendungsprocess: txsr <= txsr(txsr'left-1 downto 1) & '1'; Weis im Moment nicht wied er zu beseitigen wäre.
txsr <= txsr(txsr'left-1 downto 1) & '1'; Mitdenken... :-/ txsr <= txsr(txsr'left-1 downto 0) & '1'; Da hätte der Simulator aber auch meckern müssen...
Angehängte Dateien:
-

Simulation_C2.JPG
98 KB
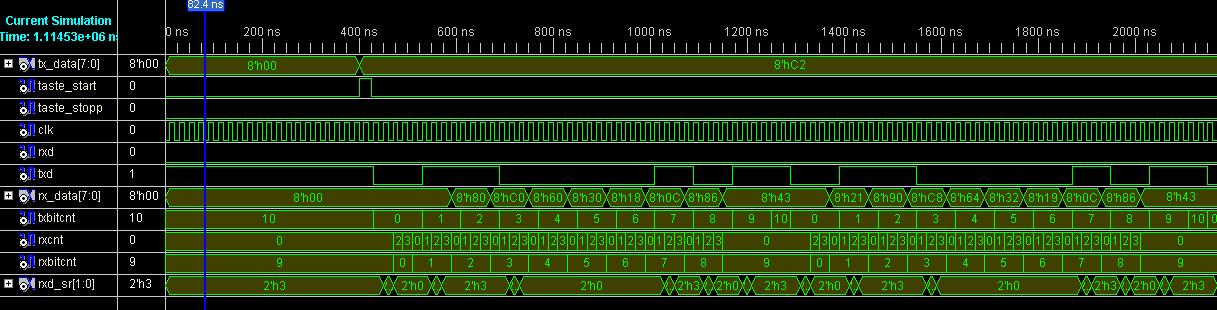
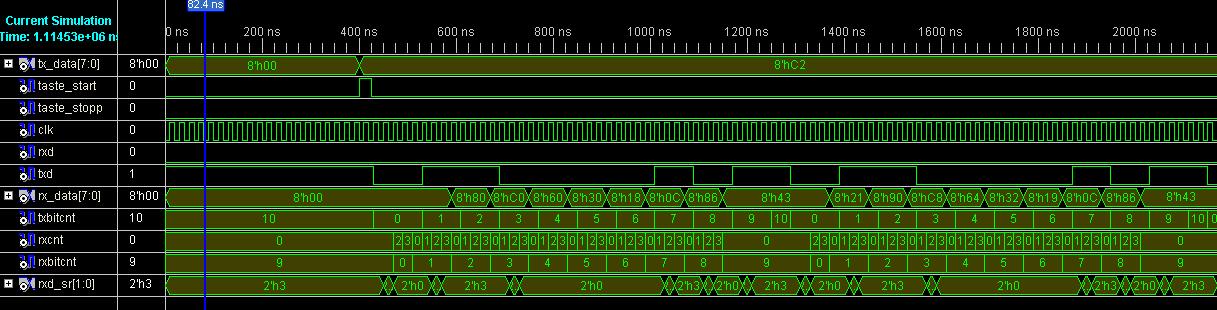
Nochmal zu diesem Thema: Bisher habe ich AA übertragen, da hat alles funktioniert: Übertrage ich jetzt x"C2" kommt am Emfänger nichts mehr an??? Die UART ist dich nicht nur zum Empfang von x"AA" geeignet? Gruß
Du hast ein Problem mit der Schieberichtung: C2 = 11000010 43 = 01000011 Siehst du was? Wenn du 71 sendest wirst du 8E empfangen usw.usf. Fazit: wenn der Sender das MSB zuerst rausschiebt, dann sollte der Empfänger auch das MSB zuerst empfangen...
1 | txsr <= txsr(txsr'left-1 downto 1) & '1'; -- links schieben, mit MSB beginnen |
2 | |
3 | rxsr <= rxd_sr(1) & rxsr(rxsr'left downto 1); -- rechts schieben, weil LSB first |
Mach das Empfangsregister doch so:
1 | rxsr <= rxsr(rxsr'left downto 1) & rxd_sr(1); -- links schieben, weil MSB first |
PS: Phänomenal, dass du das nicht selber siehst ;-)
> hab' das gerade auch von oben bis unten durchgelesen
Donnerwetter, meine Hochachtung.
Ich musste es immer nur in kleinen Häppchen aufnehmen ;-)
Naja seht es mal so : bei jedweder möglichen Frage in Zusammenhang mit Uart die jemals wieder auftreten könnte darf auf diesen Thread verwiesen werden :)
Angehängte Dateien:
-

Simulation_C2.JPG
98 KB
Eine weitere Frage: Das Startbit des UART-Signals ist nicht genauso lang wie die Datenbits. Das macht mir Probleme, wenn ich es Manchestercodieren will, weil da alle Bits gleich lang sein müssen. Beim Stoppbit wird hier bewusst länger gewartet, aber das Startbit ist irgendwarum länger. Bei meiner Frequenz ist das Startbit 100ns, die Datenbits 80ns. Warum dieser Unterschied bei gleicher Bitrate? Ziel ist es alles gleich lang zu machen. Mit der oben genannten MUX-Version ist das kein Problem, aber bei der verwendeten schon.
> Warum dieser Unterschied bei gleicher Bitrate? Mein Glückwunsch, du hast einen Takt Latency entdeckt. Das ursprüngliche Konzept dieser UART setzt eine Baudrate voraus, die wesentlich geringer als die FPGA-Taktfrequenz ist. Da kann man 20ns Verzögerung schon mal tolerieren ;-) Du solltest bei derart knappen Timing keinesfalls irgendwelche Werte herrechnen. Hier muss jeder Takt ausgezählt werden.
1 | Generic ( Quarz_Taktfrequenz : integer := 50000000; -- Hertz |
2 | Baudrate : integer := 12000000 -- Bits/Sec |
3 | );
|
Du solltest bei derart knappen Timing keinesfalls irgendwelche Werte herrechnen. Denn so schön diese Formel aussieht:
1 | if txcnt < ((Quarz_Taktfrequenz/Baudrate)-1)then |
So falsch ist das Ergebnis: 50000000/12000000 = 4,16666666 > Bei meiner Frequenz ist das Startbit 100ns, die Datenbits 80ns. 80ns sind damit genauso falsch wie 100ns. Richtig wären 83,3333ns. Die wirst du aber mit einem 20ns Takt niemals erreichen... > Ziel ist es alles gleich lang zu machen. Dann starte den Zähler bei 1:
1 | if (tx_start = '1' and tx_busy = '0') then -- dauernd senden, solange tx_start aktiv |
2 | txcnt <= 1; -- Z�hler initialisieren |
>> Ziel ist es alles gleich lang zu machen. >Dann starte den Zähler bei 1: >if (tx_start = '1' and tx_busy = '0') >then > txcnt <= 1; Was wäre zu ändern um für das Stoppbit die gleiche anforderung zu stellen? Müsste der Zähler dann einfach nur bis neun gehen? Mir scheint wenn ich den zähler bis neun gehen lasse, dann iwrd das Stoppbit zu kurz. (txbitcnt geht nur bis 2)
> Was wäre zu ändern ... Du hast eine ganz andere Aufgabenstellung, warum fängst du mit einer SIO an, machst die dann rasend schnell, und hängst anschliessend noch einen Manchesterdecoder dazu? Das wäre wie wenn du sagst: Ich brauche ein Fortbewegungsmittel, also nehme ich mir ein Moped (RS232-SIO). Dann bastle ich solang dran herum, dass ich damit damit 300 fahren kann (12Mbit/sec). Und zum Schluss mache ich Flügel dran (Mnachester), dann bin ich fertig. Richtig wäre gleich zu sagen: ich brauche ein Flugzeug. > Was wäre zu ändern ... Ich klinke mich hier aus, denn du schießt dir gerade mit dem tx_busy ins Knie. An dem haben wir ganz zu Anfang (weißt du das noch?) herumgemacht. Wie gesagt: du brauchst (selber) erst mal eine genaue Definition der Zielaufgabe. Welche Daten mit welcher Geschwindigkeit mit welcher Codierung. Wozu willst du das überhaupt verwenden? Wäre ein anderes Protokoll nicht geeigneter?
Ziel: ca.5Mbit Daten(muss nicht genau sein), die Manchestercodiert übertragen werden sollen.(also 10Mbit) 1. FPGA sendet -> kapazitive Übertragungsstrecke(deswegen Manchestercodiert für gleichspannungsfreiheit) -> 2.Fpga empfängt wertet aus.
Womit wir wieder am Anfang wären... Lother Miller schrieb: > 12MBit/s sind zu schnell für eine RS232 > Schnitte. Hier solltest du dir ein sinnvolles Interface aussuchen. Z.B. > ein synchrones Interface wie SPI. Wenns unbedingt asynchron sein soll, > dann mit Manchester-Codierung, damit pro Bit wieder aufsynchronisiert > werden kann.
Es soll nur eine RS232 simuliert werden, d.h. die Daten sollen die "Form" einer UART haben und werden per LVDS übertragen. Ok, aber danke bis hierher!
> Ok, aber danke bis hierher!
De nada ;-)
Moment, seit wann ist RS232 Manchestercodiert? Das widerspricht deinem letzten Posting... Ist es wirklich Bestandteil deiner Aufgabe eine RS232-ähnliche Übertragung mit Manchestercode zu "pimpen" und anschließend das ganze noch schnell zu "pfuschen"? Kann es vielleicht sein, dass du eine asynchrone Übertragung mit Hilfe der Manchestercodierung auf die Beine stellen und hierbei den Takt mit Hilfe der Codierung zurückgewinnen sollst? Das würde nämlich technisch durchaus Sinn machen. Sprich mal mit deinem Prof. und erzähl ihm deine Erkenntnisse, die du hoffentlich aus diesem Thread hier gelernt hast. So macht das doch sonst keinen Sinn. Achja, wenn er wirklich darauf besteht, dann erzeug dir einen höheren Systemtakt (DCM/PLL), wie schon gesagt muss die Abtastrate wesentlich höher als die Baudrate sein. PS: Halt uns bitte auf dem Laufenden :)
Bitte melde dich an um einen Beitrag zu schreiben. Anmeldung ist kostenlos und dauert nur eine Minute.
Bestehender Account
Schon ein Account bei Google/GoogleMail? Keine Anmeldung erforderlich!
Mit Google-Account einloggen
Mit Google-Account einloggen
Noch kein Account? Hier anmelden.