Hallo, zuerst mal hoffe ich, dass ich das richtige Forum gepostet habe, da ich noch neu bin ihr. Ansonsten ersuche ich einen Moderator dieses bitte zu verschieben. Ich möchte in nächster Zeit Schritt für Schritt einen Quadrocopter aufbauen. Möchte aber nicht auf einen bestehenden Bausatz zurück greifen. Ich weiß, dass ich so vielleicht Gefahr laufe das der Quadrocopter nie abheben wird. Mein erster Schritt wäre gewesen, dass ich mir ein mathematisches Modell erstelle mit Hilfe von Mathematica bzw. Maple. Dieses in Matlab/Simulink danach implementiere und mal verschiedene Regelungsstrategien ausprobieren kann. Angefangen von einem PI bzw. PID Regler bis hin zu Modellbasierten Ansätzen. Die weiteren Schritten wären die Auswahl der benötigten Hardware (Steuerung, BL-Motoren usw.). Dieses sehe ich aber momentan noch zweitrangig, da ich zuerst meinen Copter in Simulink „fliegen“ lassen möchte. Erst später sollte dann das „echte Modell“ mit dem Simulationsmodell abgeglichen werden. Zur Herleitung des mathematischen Modells werde /möchte ich die Projektionsgleichung bzw. den Formalismus von Lagrange verwenden. Vom Aufwand her sind ja beide beinahe gleich. Hier nun meine Fragen: Hat vielleicht jemand schon mal einen Quadrocopter modelliert und könnte mir dieses Wissen zur Verfügung stellen. Dies würde mir sehr helfen. Da ich momentan noch sehr unsicher bin was ich in meine Modellbildung alles mitnehmen soll. Ich habe momentan so begonnen, dass ich 6 DOF angenommen habe. Das heißt die Koordinaten x, y und z. Weiteres dann noch 3 Winkelfreiheitsgrade. Daher bekomme ich danach ein Modell 12 Ordnung. Um ein möglichst einfaches Modell zu bekommen, habe ich begonnen den Quadrocopter nur als eine Objekt (mit somit einer Masse) zu sehen. Schwerpunkt liegt auch näherungsweise zentral in der Mitte (grobe Modellannahme). Weiteres lass ich vier Kräfte (sollen die Schubkraft darstellen) angreifen, an den jeweiligen Positionen der Rotoren. Wiederum handelt es sich um eine grobe Näherung, da ich die Zeitkonstanten der Motoren usw. vernachlässige. Jedoch denke ich, dass sich die Drehzahl um ein vielfaches schneller einstellt, als sich die Lage des Copters aufgrund der Drehzahländerung ändert. Die Reaktionsmomente der BL-Motoren füge ich auch direkt in meine Gleichungen ein. Hier werde ich eine fixe Abhängigkeit zwischen Schubkraft und Reaktionsmoment annehmen. Das wäre es eigentlich schon gewesen, jedoch komme ich auf ein sehr komplexes Modell obwohl ich sehr viele Vereinfachungen getroffen habe. Weiß vielleicht noch wer weitere Vereinfachungen bzw. wie man das vielleicht etwas geschickter angehen kann. Irgendwie Freiheitsgrade reduzieren usw.? Wäre toll wenn sich wer die Mühe machen würde, und sich mein doch relativ lang gewordenen Text durchliest. Hat vielleicht wär eine gute Literatur dazu bzw. ein fertiges Simulationsmodell? Mfg und Danke für Antworten Christoph
Du solltest die Verschiedenen Freiheitsgrade gleich entkoppelt betrachten. Z.B. Kraft, bzw. Bewegung in Z-Richtung ist nur von Summe der Rotorkräfte abhängig. Rotation um Z ist die Summe aller Drehgeschwindigkeiten (linksdrehend geht negativ ein). Differenz zwischen zwei gegenüberliegenden Rotoren gibt Kippen. Das sind natürlich Vereinfachungen, da die Auftriebskraft auch vom Kippwinkel abhängt. Wenn du diese Auftrennung nicht machst, wird es sehr schwer!
Danke für die schnelle Antwort! Das heißt ich soll besser mit Drall- und Impulssätzen arbeiten. Und Fliehkräfte + Corioliskräfte nicht mitnehmen. Wenn ich mir das jetzt so durchüberlege: Ich kann für jeden Winkelfreiheitsgrad einen Drallsatz ansetzten. Wobei in diese die Momente und Schubkräfte eingehen. Wie komme ich jedoch dann dann zu den den Impulssätzen für die Ortsfreiheitsgrade? Da muss ich dann auch wieder schauen wie die Kräfte mit den entsprechenden Winkel angreifen. Somit hätte ich eine Teilweise Entkopplung von den Gleichungen. Und es geht im großen und ganzen nicht zu viel Information verlorgen. Da hier eigentlich dann wirklich nur die Fliekräfte + Corioliskräfte fehlen. und für kleine Geschwindigkeiten, liegt ich dann nicht so weit daneben. Das ist zwar jetzt nicht so wie du oben geschrieben hast, jedoch was hälst du von so einer Vorgehensweise? Sowas sinnvoll oder denk ich wieder zu kompliziert? mfg, Christoph
So wie du schreibst habe ich es gemeint. Nur reichen dir die Rotationen ja nicht aus. In Z-Richtung musst du mit der Kraft(direkt) arbeiten. Wenn der Heli um Y n° kippt, haßt du eine Kraft in X um sin(n)*F_z. Eben so in der Art. Letztlich musst aber du herausfinden, wie du zu den besten Lösungen kommst. Es gibt nicht DIE Lösung. Je mehr du berücksichtigst, desto besser KANN die Lösung werden. Es kann aber auch sein, dass es dann nicht mehr lösbar ist.
Angehängte Dateien:
-

Regler.png
11 KB
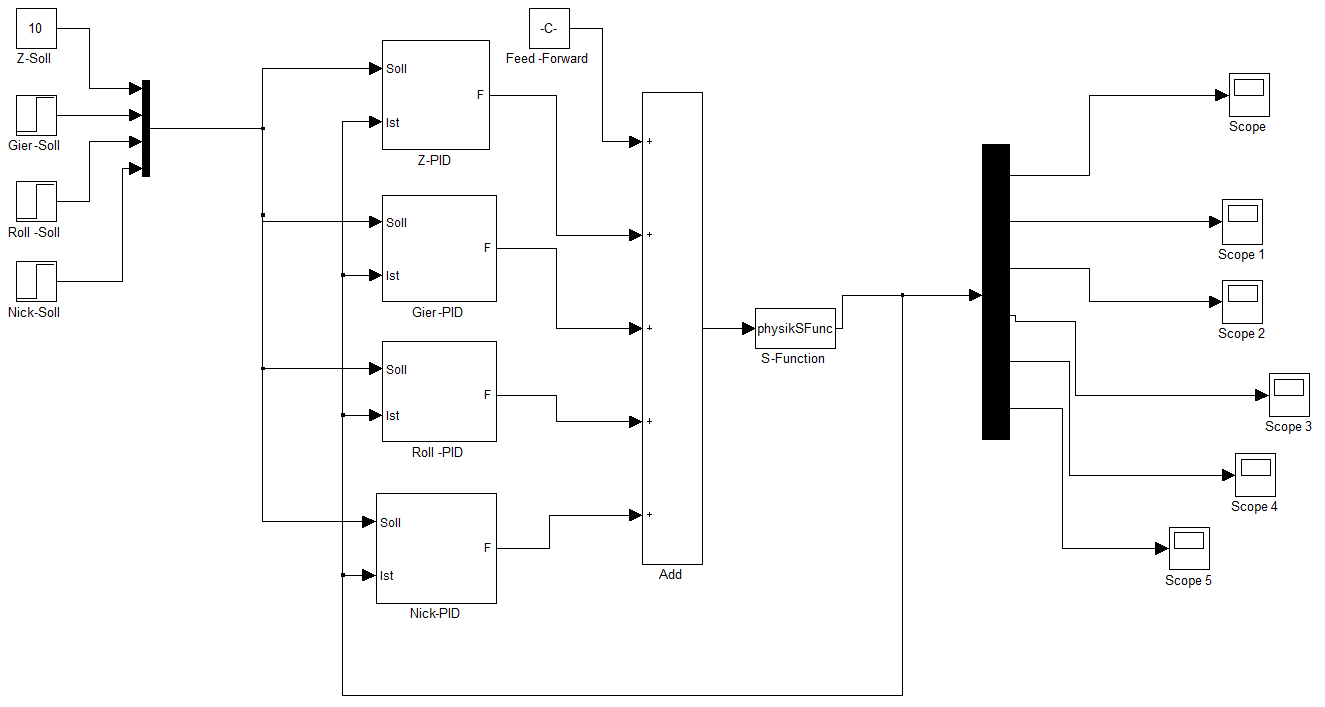
Hier wieder ein kleines Update: Ich habe mir nun ein Modell erstellt wie oben beschrieben. Diese in Matlab implementiert (S-Function). Jetzt bin ich bei dem Punkt wo es um den Aufbau der Regler geht. Habe ein Bild angehängt von meinem Entwurf. Habe für jede Winkelachse einen eigenen SISO PID-Regler implementiert. Einen weiteren SISO PID-Regler habe ich für die Regelung der Höhe implementiert. Weiteres verwende ich einen Feed-Forward Anteil zur kompensation der Gewichtskräfte. Regler funktionieren eigentlich sehr gut. Das einzige Problem was ich momentan habe ist der Wind-Up bei den I-Anteilen, darum habe ich diese noch ausgeschaltet. Wie soll man die Größen wählen welche man über die Fernbedienung vorgibt? Was ist "besonders" gut? Ist es gut wenn ich die Winkel nehme oder soll ich lieber die Winkelgeschwindigkeiten verwenden? Bei der Höhenregelung werde ich die Steiggeschwindigkeit vorgeben, da ich so den Copter besser schweben lassen könnte. Wäre auch für weitere Hinweise bzw. Verbesserungsvorschläge bei der Wahl der Reglerstruktur dankbar. Den Modellbasierten Ansatz werd ich jetzt noch nicht weiterverfolgen. Diesen möchte ich erst verfolgen, wenn ich das Modell dann aufgebaut habe, und die PID Reglung einwandfrei funktioniert. Im Internet finde ich leider nichts über Reglerstrukturen usw. von Quadrocopter. Lg, christoph
>Im Internet finde ich leider nichts über Reglerstrukturen usw. von Quadrocopter. Etwas kurzsichtig ? Dann lass es besser sein. Sogar in deutsch : http://forum.mikrokopter.de/ http://www.mikrokopter.de/ucwiki/
Bitte melde dich an um einen Beitrag zu schreiben. Anmeldung ist kostenlos und dauert nur eine Minute.
Bestehender Account
Schon ein Account bei Google/GoogleMail? Keine Anmeldung erforderlich!
Mit Google-Account einloggen
Mit Google-Account einloggen
Noch kein Account? Hier anmelden.