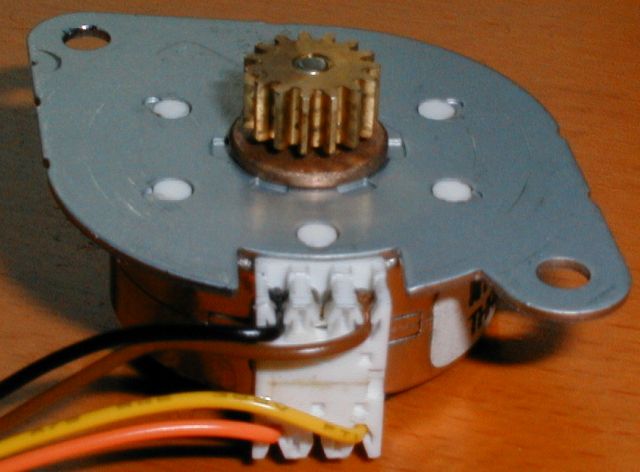
Hallo, ich habe bei einer eBay-Auktion ein Paket mit defekten Druckern zum Ausschlachten gekauft - vor Allem wegen der Schrittmotoren. Ich habe zwar bisher noch nichts mit Schrittmotoren gemacht, aber aus einer kurzen Einführung, die ich mal irgendwo im Netz gelesen habe weiss ich, dass es wohl bipolare Schrittmotoren sind - schon weil sie nur vier Anschlussdrähte haben. ABER: Dort, wo die Leitungen angeschlossen sind, ist jeweils in der Mitte noch ein Kontakt unbelegt, wo noch ein weiteres Kabel angeschlossen werden könnte (Siehe leider etwas verschwommenes Foto im Anhang). Nun frage ich mich, ob das nicht evtl. ein Indiz dafür ist dass ich diese Motoren auch unipolar ansteuern könnte, wenn ich diese beiden Kontakte auch noch anschliessen würde - oder haben diese Kontakte einfach keine Funktion?
Angehängte Dateien:
-

steppermotor.jpg
37 KB
hi, die möglichkeit besteht durchaus, häufig werden unipolare motoren im bipolarbetrieb eingesetzt und die anschlussdrähte einfach schon bei der produktion weggelassen. am einfachsten ist es wohl, mit einem ohmmeter vom mittenanschluss zu den beiden kabeln den widerstand zu messen. wenn der anschluss als mittelanzapfung beschaltet ist kann der motor auch unipolar betrieben werden. gruss, harry
Hi miss doch einfach mal zwischen den mittleren Kontakten und den jeweiligen äußeren. Wenn du da etwa den halben Spulenwiderstand mißt sind das die Mittelanzapfungen der Spulen. Matthias
Danke für eure Postings! Nachdem ich das gelesen habe, kam mir das mit dem Widerstand messen auch irgendwie bekannt vor... Naja, wunderbar. Dann weiss ich jetzt jedenfalls, dass ich die Motoren auch unipolar betreiben kann - sehr schön. In einem anderen Thread hier habe ich gelesen, dass man unipolare Schrittmotoren sehr einfach an einem Mikrocontroller betreiben kann, da man nur vier Transistoren und vier Dioden bräuchte. Kann mir zufällig noch jemand einen Link nennen, wo ich dazu ein Schaltbild + evtl. ein paar weitere Infos finden kann?
hi, da braucht's nicht viel info. auf die mittelanzapfung des motors (auf beide natürlich) legst du die betriebsspannung, jeden anschluss des motors (4 st.) legst du auf je den kollektor eines transistors (je nach type reicht ein bc337, wenn's dickere motoren (strom >1 ampere) sind nehm ich gerne darlington-typen, die haben die dioden schon drinnen). die basis hängst du über 750 zum avr-pin, den emitter auf gnd. den gemeinsamen massepunkt der transistoren kannst du auch über einen shunt (0,1 - 1ohm, je nach strom) nach gnd legen, dann kannst du den motorenstrom während des betriebs messen. und dann: eine spule nach der anderen ein- und abschalten, schon tickt das motorchen. gruss, harry
Hallo Joachim du kannst auch den 7-fach Darlington-Leitungstreiber ULN2003 nehmen. Der liefert max. 500mA pro Kanal. Bei längerer Belastung empfiehlt es sich einen Chip-Kühlkörper aufzusetzen. Für Experimente ist die Schaltung gut geeignet. Eine High-End-Schaltung ist dies nicht. _____________ | | | SP1 SP2 +8...12V _|__|__|__|______|___ | 16 15 14 13 9 | | | ULN2003 | | | |_____________________| | | | | |8 = Masse 1 2 3 4 P1.0...3 so etwa wäre die Schaltung. Die Mittelanzapfungen gehen zusammen an ca. +8V mit dem Pin9 des Chips. Die Spulen-Enden gehen an Pins 16/15 bzw. 14/13. Diese sind mit den Darlington-Ausgängen verbunden. Die dazugehörigen Eingänge sind Pins 1..4. Pin 8 geht an Masse. Der Chip hat Schutzdioden eingebaut. Damit der Motor läuft, muß eine passende Impulsfolge an die Pins 1...4 gehen - am besten ausprobieren!
Bitte melde dich an um einen Beitrag zu schreiben. Anmeldung ist kostenlos und dauert nur eine Minute.
Bestehender Account
Schon ein Account bei Google/GoogleMail? Keine Anmeldung erforderlich!
Mit Google-Account einloggen
Mit Google-Account einloggen
Noch kein Account? Hier anmelden.