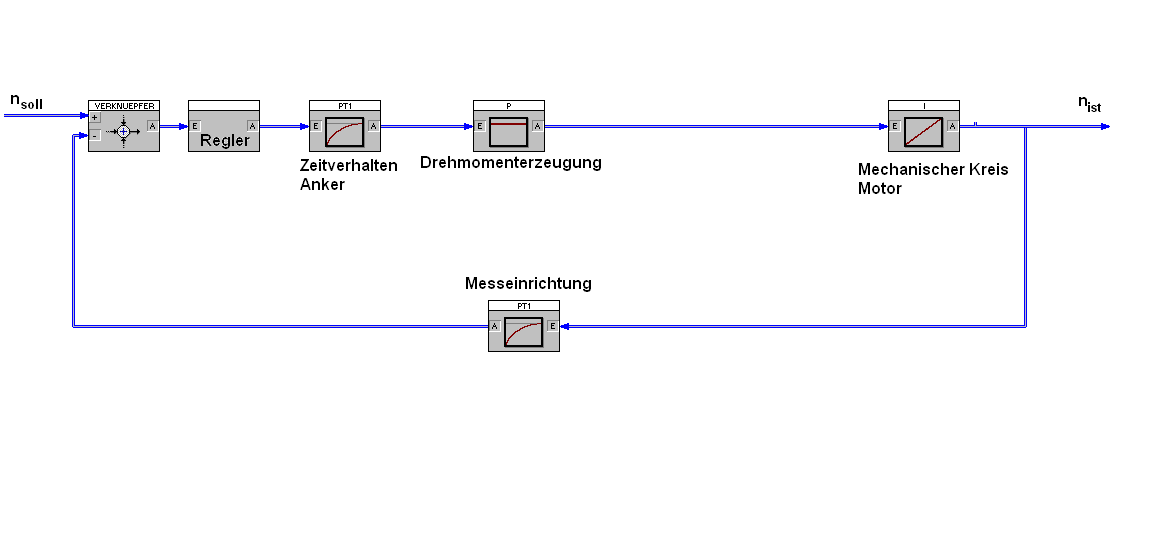
Hallo liebes Forum! Ich beschäftige mich seit einiger zeit mit einer einfachen Blockschaltbilddarstellung für einen Drehzahlregelkreis. Aus dem Handbuch der Regelungstechnik von Lutz Wendt habe ich eine allgemein gehaltene Beschreibung gefunden. Änhlich dem Anhang. (Im Buch werden noch Totzeiten des Stromrichters mitbeschrieben). Mir gehts aber in erster Linie nur darum, warum die Beschreibung eine Strecke ohne Ausgleich zeigt. Bei der darstellung wie im Anhang, würde ein Motor nach einem Führungsgrößensprung sein Drehzahl bis ins Unendliche erhöhen... Doch gibt es in der Realität schließlich ein Endwert. Denn je größer die Drehzahl, desto kleiner der Momentbildende Strom desto kleiner die Drehzahlerhöhung, bis es stopt. Und genau dieser Satz schneint mir in solchen Darstellungen nicht berücksichtigt. Hat jemand vielleicht eine einleuchtende Erklärung dafür? Darstellungen aus anderen Büchern, in denen noch Stromtransformationen stattfinden und spezialisierungen drin enthalten sind habe ich mir schon angeschaut, doch leider schaffen die nur mehr verwirrung. Vielen Dank im Voraus. Gruß Borger
Angehängte Dateien:
-

drehzahlreg.PNG
5,6 KB
In deinem Modell fehlt die im Anker induzierte Spannung. Sie wirkt als negative Rückwirkung von Drezahl auf die Spannung am Anker
Danke! Aber gilt das nicht nur bei GM? Und hast du vielleicht auch Literaturempfehlung für mich?
Ich bin von einer Gleichstrommaschine ausgegangen, weil diese deinem Modell am nächsten kam, und die am einfachsten zu regeln ist. Prinzipiell gilt dieser Effekt für alle Maschinen, wobei die Beschreibungen dann deutlich komplizierter werden. Stichwort "Koordinatentransformationen".
könnte man dann Sinnerhaltend eine Rückführung von istwert vor die Drehmomenterzeugung ziehen oder müsste das auch eine Verzögerung sein?
Ich befürchte, daß Du hier zwei Sachen vermischst bzw. bei der Übertragung aus dem Handbuch ins Blockschaltbild unzulässig vereinfacht hast . Was fehlt, ist das Modell des Motors. Dieses muß das Verhalten des Motors abbilden. In Lehrbüchern ist meist der Motor als solcher dargestellt. Beisbiel Verhalten Nebenschlußmotor/permanenterregter Motor: 1. Drehzahl Proportional zur Eingangsspannung 2. Nur bei Nebenschlußmotor - bei Feldschwächung Drehzahlerhöhung und Momentenverringerung. 3. Bei erhöhung des abgeforderten Drehmomentes absinken der Drehzahl (dieser Teil fehlt). Das muß das Motormodell abbilden. Dem kann dann der Drehzahlregler überlagert werden der unter Umständen noch einen unterlagerten Stromregler haben kann kann.
keine zeitverzögerung notwendig, einfache Verstärkung. Auch Drehzahlkonstante in Datenblättern von E-Motoren genannt. Gegenkopplung geht von n_ist zu dem Punkt zwischen den Blöcken "Anker" und "Regler".
Nur warum ist diese Wirkung in dem Buch nicht berücksichtigt? Und gibts da Literatur drüber, die ähnliche Beschreibungen zeigen?
Weil, wenn im Buch ein Motor eingezeichnet ist, dessen Eigenschaften vorausgesetzt werden zumal es sich dabei sicherlich um eine schematische Darstellung des Regelkreises handelt und nicht um eine Simulation. Entweder Du stellst den Motor als Symbol dar oder Du mußt dessen Verhalten auch simulieren.
Habe eine sehr schöne Dokumentation zum Thema gefunden. [http://www.eit.uni-kl.de/liu/downloads_op/Versuch_GSM.pdf]
Bitte melde dich an um einen Beitrag zu schreiben. Anmeldung ist kostenlos und dauert nur eine Minute.
Bestehender Account
Schon ein Account bei Google/GoogleMail? Keine Anmeldung erforderlich!
Mit Google-Account einloggen
Mit Google-Account einloggen
Noch kein Account? Hier anmelden.