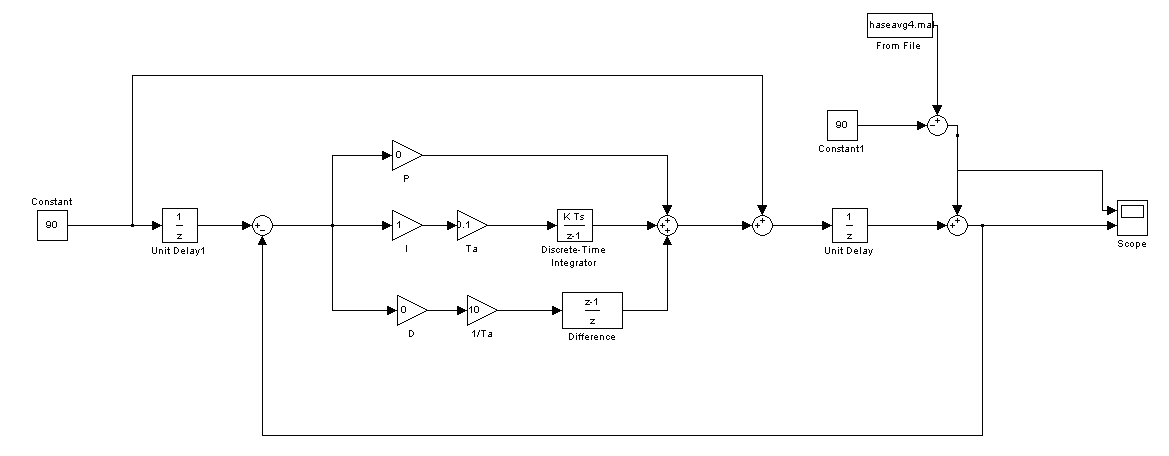
Hallo Zusammen, 1) kann man aufgrund der Schwankung auf einem System die Regelparameter für einen PI(D) Regler festlegen? konkret: ich stelle den Wert auf 90 und stelle fest dass der Wert mit 3 Minuten schwankt. zudem hat es noch überlagerte kleinere Störungen mit 10 Sekunden Periodendauer. Abgetastet wird mit 1/10 s Neue Werte werden mit 1/10 s ausgegeben. Eine Schrittanwort funktioniert nicht, da das System nach 1/10s bereits auf dem Endwert ist. 2) die Regelung habe ich wie im Anhang simuliert. Mit Igain = 3.5 und Pgain = 0 habe ich in der Simulation sowie an der Anlage die besten Resultate erzielt. Diese Werte habe ich durch einen ParameterScan ermittelt. Mit diesen Settings kann ich aber die 10Sekunden Störungen nicht ausregeln. Habt ihr Vorschläge, wie ich weiter vorgehen könnte um die Regelung zu optimieren? Gruss Hans
Angehängte Dateien:
-

PIDsimulationSimulink.PNG
2,7 KB
Hallo, ich verstehe deine Simulation irgendwie nicht. Wo ist in deiner Simulation das Modell, welches du regeln willst vorhanden? Oder ist besteht dein System nur aus einer Totzeit? Du könntest mittels einer Robustheitsuntersuchung überprüfen ob dein System für die gefunden Regelparameter intern stabil ist. Mit einer Optimierung könntest du in der Simulation optimale Parameter finden, jedoch müsstest du für diese wieder die Robustheit des Regelkreises untersuchen. Einfache Möglichkeit wäre auch noch ein FKL-Verfahren anzuwenden. Ich glaube mit einem PID Regler kannst du keine periodischen Störungen komplett unterdrücken. Aber nachdem diese eine große Periodendauer haben, müsste der PI(D)-Regler leicht mit diesen klar kommen. Ich hoffe ich habe die Fragen nicht total missverstanden! MFG, Christoph
Angehängte Dateien:
-

plot.PNG
33 KB
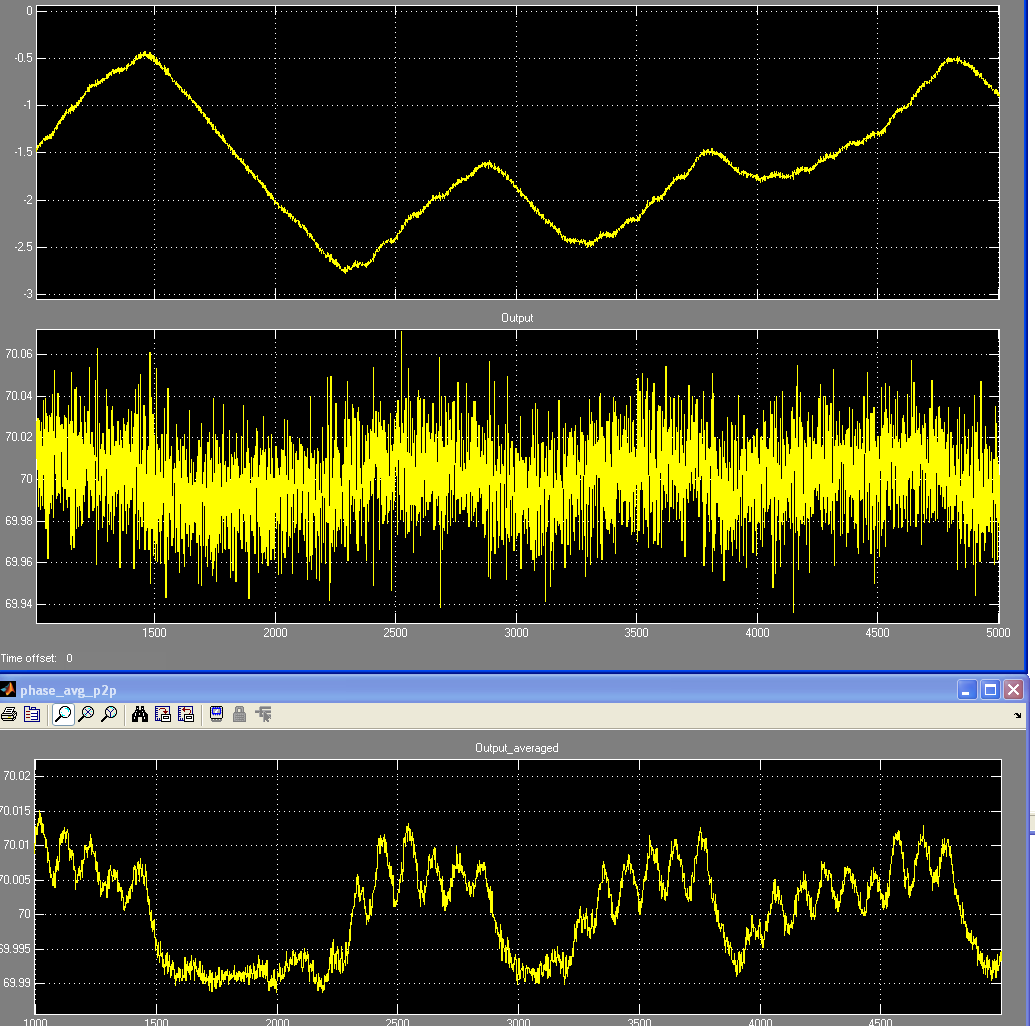
Hallo Christoph, danke für deine Antwort. JA, mein System besteht nur aus einer Totzeit. Ich lese die Phasenlage mit einem ADC ein, und stelle entsprechend einen neuen Wert mit dem DAC. Beim nächsten Abtastwert ist dann die Phase bereits auf dem neuen Sollwert. Im Anhang habe ich noch einen Plot von dem Störsignal, dem geregelten Ausgang sowie dem Ausgang nach 40fachem moving average. Wenn ich mein Störsignal ableite, erhalte ich ein Signal mit der gleichen Form wie wenn ich mein Ausgangssignal mit einem Moving Average Filter filtere. hat das was zu bedeuten? ich habe nun mal versucht, den P Anteil hinzuzufügen. Dafür verwende ich den gemittelten Feedback Wert (moving average 100 fach). Der erhaltene P Korrektur Wert sieht dann zwar gut aus, aber das Output Signal bleibt gleich. Wenn ich den Wert dann zu hoch stelle (60), schwingt sich das System auf. Zudem habe ich noch vor dem P Anteil einen Saturation Block eingefügt welcher auf +-1 begrenzt. Wie stelle ich diese Robustheitsuntersuchung am Besten an? Danke Gruss Hans
die Zeitskala vom Post vorher ist 1/10s, also total 500s. Wie man im gemittelten Output Signal sehen kann, gibt es zum Einen die periodischen 10 Sekunden Schwankungen, aber auch grössere Schwankung bei der Richtungsänderung der Störung. Ohne Regelung hatte ich Schwankungen von +-2, nun noch von weniger als +-0.1. Gruss Hans
Hallo, leider habe ich momentan wenig Zeit für eine ausführliche Antwort. Daher gibts erstmal ein PDF, wo es erklärt wird, speziell für Totzeitsysteme und Robustheit. http://regpro.mechatronik.uni-linz.ac.at/downloads/pat1/Skript/pat1vo2010.pdf Kapitel 4 - Robustheit Kapitel 5 - Totzeitsysteme -> in deinem Fall sicher sehr empfehlenswert dieses mal durchzulesen. http://de.wikipedia.org/wiki/Regelkreis#Smith-Pr.C3.A4diktor - einfache Erklärung des Smith-Prädiktors. Hoffe ich konnte dir erstmal mit den Links weiterhelfen. MFG Christoph
Bitte melde dich an um einen Beitrag zu schreiben. Anmeldung ist kostenlos und dauert nur eine Minute.
Bestehender Account
Schon ein Account bei Google/GoogleMail? Keine Anmeldung erforderlich!
Mit Google-Account einloggen
Mit Google-Account einloggen
Noch kein Account? Hier anmelden.