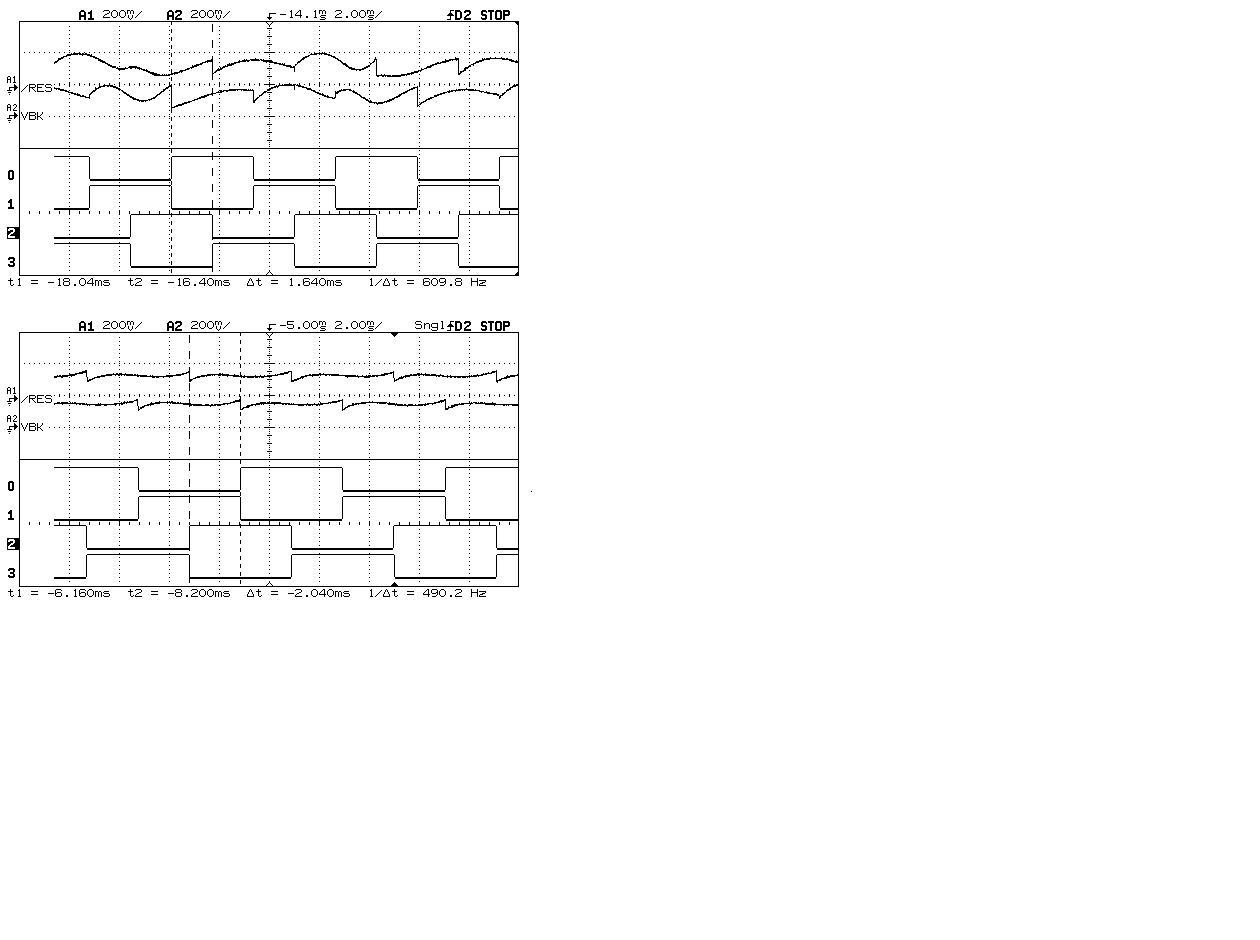
Erst einmal ein herzliches "Hallo" und schon mal vielen Dank fürs lesen Ich verfolg schon seit geraumer Zeit das Forum hier mit grossem Interesse, sehr viele interessante Themen und kompetente Antworten. Ich hoffe ihr könnt mir jetzt auch ein wenig weiterhelfen, bin nämlich an einem Punkt angelangt wo ich echt nicht mehr weiter weiss. Ich weiss das dies nicht unbedingt eine reines Mikroproblem ist, hoffe das ihr mir vielleicht trotzdem ein wenig helfen könnt :) Meine Aufgabe ist eine Entwicklung einer kompletten Schrittmotor-Anwendung, d.h sowohl die Entwicklung der Treiberstufe wie auch die dazugehörige Programmierung eines Mikrokontrollers. Aufgaben der Schaltung sind unteranderem, variable SpeiseSpannung bis zu 30V, Drehmomentreglung, FullStep, HalfStep, Mikroschrittbetrieb usw. Die unipolare Treiberstufe ist schon komplett fertig und ist mit PowerMOSEFETS realisiert worden. Bei Bedarf kann ich gerne die Schaltung online stellen. Der Motor läuft auch unterhalb seiner " maximum starting frequency " sehr gut. Hier fangen aber genau meine Probleme an, in der beigefügten Datei sind 2 Diagramme dargestellt, bei jeweils verschiedenen Frequenzen des Motors. Zu erkennen sind in der unteren Hälfte die Steuersignale, der Motor wird so angesteuert das jeweils 2 Spulen bestromt sind, in der oberen Hälfte erkennt man den Stromverlauf an den Messshunts. Ich benutze 2 Messwiderstände, für jeweils eine Spule ein Shunt. Benutze ausserdem die RealTimePorts des Mikros, unteranderem is ausserdem eine Chopperschaltung über PWM realisiert. Das ist aber alles nicht so wichtig, was ich jetzt nicht verstehe is die seltsame Kurvenform der Spannung über dem Shunt. Sobald ich eine bestimmte MotorFrequenz ( hier im BSP so um 600HZ) überschreite, seh ich die dargestellte Kurve und der Motor ruckt nur noch, nicht verwunderlich bei dem Mist den ich da seh Mir ist schon die Kurvenform im "sauberen" Betrieb nicht ganz schlüssig, woher kommt der Anstieg am Ende? Muss hier drauf achten das ich nicht in Sättigung lauf? Und warum sieht die Kurve ab einer bestimmten Frequenz so übel aus das der Motor nur noch vor sich her summt? Mein Hauptproblem ist also das ich mit meinem Motor, obwohl im Datenblatt anders angegeben, nicht über eine bestimmte Frequenz von wenigen hundert Herz hinauskomme. Unabhängig vom Drehmoment müsste ich den Motor doch über einen weit aus grösseren Bereich fahren können.Dazu muss ich noch sagen das ich den Motor unterhalb seiner kritischen Frequenz starte und dann per Hand schneller mache, d.h es ist auch ein Geschwindigkeitsrampe gegeben. Vielen Dank nochmal und Freu mich sehr über jegliche Antworten!!! Nick
Angehängte Dateien:
-

CurrentProblem.jpg
85 KB
Hi Nick, könnstest Du auch noch die Schaltung posten, und vor allem die Meßpunkte in der Schaltung. Dann sehen wir weiter. guude Thomas
Man man man geht dat flott, ja klar kann ich die posten, die hier gemessene Spannung ist über dem Shunt abgegriffen. Leider hab ich die Schaltung nur im VisioFormat. Morgen stell ich die als jpg rein, wär der hamma wene da nochmal rein schauen könntest Thomas. Nick
seh' ich mir auch mal an... Screenshot hätte erstmal gereicht ;-) Was ist gegen Visioformat einzuwenden? Gruß AxelR.
Angehängte Dateien:
-

MusterEntwurf.jpg
78 KB
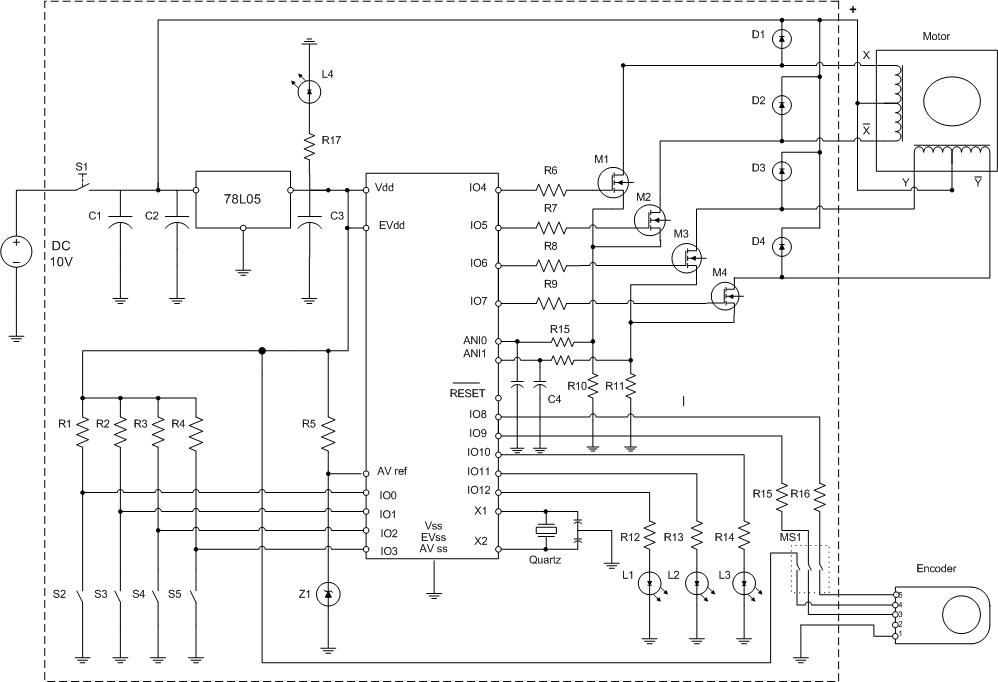
So hier die versprochene Schaltung hoffe das hilft euch weiter :)
Ach ja R10 und R11 sind die Messwiderstände von jeweils 250mOhm über die der Oskar angeklemmt ist.
Hi! Was sind denn das für Mosfets? Machen die mit 5V überhaupt richtig auf? Ich kann nicht verstehen warum so oft mit 5V angesteuert werden muss. Das ist gerade so die Öffnungsspannung eines normalen Fets und auch die "besseren" gehen noch nicht richtig. Unter 10V Ugs ist Mist! Suche doch bitte mal in der Codesammlung nach Mostreiber oder so. Ach ja, die R's vor den Gates sind wie gross? Mfg Uwe
Also die Fets machen bei 5V komplett auf, extra drauf geachtet :) die Vorwiderstände betragen jeweils 100 Ohm
Sowas hier gefällt dir wohl nicht: http://www.nanotec.de/media/imt901.pdf Diesen IC gibt es auch deutlich preiswerter bei z.B. Glyn als TA8345H. 36V 2Ampere Voll/Halb/Viertel/Achtelschritt mit internem Counter und Encoder für die Motorphasen, mußt den motor halt bipolar beschalten. Gruß, Holm
Vielen Dank, darf leider bis auf den 7805er keine ICs benutzen. ;) Und der ganze Kram muss auch Unipolar sein weil ich nur sehr wenig Platz habe und da keine 8FETS passen würden. Der Mist ist ja grade das ich alles mit "analogen" Bauteilen erstellen muss. :( Gruss Nick
Die Chopperei hat hier noch garnicht eingesetzt, oder? der Stromanstieg im Motor ist viel zu gering, offensichtlich reicht die Betriebsspannung nicht aus, um den Strom in den Wicklungen auf das Maß ansteigen zu lassen, welches für das geforderte Drehmoment zuständig ist. Der Strom muss so stark ansteigen, dass bei langsamer Fahrt die Kanäle "0" bis "3" in den High Phasen einige (zig) Male unterbrochen dargestellt werden sollten. Der Spulenstrom sollte bis an den Scheitel(T_on min) auf seinen maximalstrom angestiegen sein und durch die Taktung innerhalb der Phse auf einem konstanten Mittelwert gehalten werden. Dafür sind ja wohl auch die Freilaufdioden da... Sonst wird das nichts, je Schneller du wirst, je weniger ändert sich der strom in den Motorspulen -> kein Drehmoment, Motor fiept nur noch. Motorspannung erhöhen. Induktivität des Motors messen -> Stromanstiegszeit berechnen Welche Mosfets sind da drinn? Welchen Treiberstrom schaffen de Ports? Das fiel mir so auf. Übrigens der Link von holm ist aber echt super. Der Hinweis auf den "richtigen" Industrietyp goldwert. Viele Grüße AR.
@nick: Seltsam, daß Du die Widerstände nicht mit Papier und Bleistift selber bauen mußt :-) Du tust mir leid. Allerdings kann es nicht schaden, sowas mal zu üben, aber aus sicherheitsgründen würde ich den Stromchopper trotzdem mit einem Komparator aufbauen, da sich ein Mikrorechner auch mal weghängen kann und dann die Motorwicklung gebraten wird. @Axel R. Ja, das nach einer Weile der Preisunterschied in Gold aufzuwiegen ist, habe ich auch schon gemerkt :-) Ich habe da übrigens einen Zahlendreher drin, das Ding heißt richtig TA8435, ein Datenblatt habe ich noch schnell hier her gehängt: http://www.tiffe.de/other/ta8435.pdf Gruß, Holm
...,. Vielen Dank, darf leider bis auf den 7805er keine ICs benutzen. ...,. Der Block in der Mitte deiner Schaltung ist ein Mikrocontroller, oder eben eine analoge Blackbox? AR.
Bitte melde dich an um einen Beitrag zu schreiben. Anmeldung ist kostenlos und dauert nur eine Minute.
Bestehender Account
Schon ein Account bei Google/GoogleMail? Keine Anmeldung erforderlich!
Mit Google-Account einloggen
Mit Google-Account einloggen
Noch kein Account? Hier anmelden.