Hallo, Problem: bei einem Modellflugzeug soll eine Fluglage parallel zur Erdoberfläche eingehalten werden... wie kann ich das messen? Ich hätte einen zweiachs-Kugelkondensator, das ist eine Art Halbkugel mit einer Flüssigkeit drin welche sich in Abhängigkeit der Gewichtskraft im unteren Bereich ansammelt... gibt bei geeigneter Ansteuerung zwei Neigewinkel zurück... wäre eine visuelle Messung besser? wie genau ist GPS? ich möchte Regelschwankungen möglichst vermeiden, es soll also nicht dauern auf- und ab bzw. seitlich wegkippen Barometrisch? Wer hat schon mal sich darüber Gedanken gemacht? Grüße, Dierk
also solche lagesensoren sind wahrscheinlich dafür am besten geeignet GPS hat nicht die benötigte genauigeit ... und wie willst du das Visuell machen? mit nem laser in richtung boden? was ist, wenn unter dem einen flügel n kleiner berg ist? dann geht dein flugzeug in schräglage ... barometrisch? ich glaub nicht, dass das so genau ist, um ein flugzeug in der waage zu halten.
Kann man nicht die Sonne als Bezugspunkt wählen? (Blende-LDR-Nachführung...) Für kleine Zeiträume ist die Sonne praktisch ein Fixstern. Naja wenn's regnet wird's ein wenig knifflig...
GPS??? Wie soll das denn gehen? Drei Empfänger, je einen in der Steurbord- und Backbord-Tragfläche und noch einen im Heck und dann die Differenz der Höhenangaben auswerten? Also nehmen wir mal an, die Genauigkeit der Höhe beträgt 10 Meter (ich meine aber GPS ist da nicht so doll). Weiter angenommen, Dein Modellflieger ist 14,14 Meter breit (o.k., ist schon ein sehr großes Modell evtl. vom A380), dann könntest Du immerhin Schräglagen ab 45° erkennen. Also wenn Dir das reicht... CU, Markus_8051
Hallo Dierk, eine Möglichkeit der Lagemessung ist der Einsatz eines Beschleunigungssensors. Wenn das Flugzeug mit konstanter Geschwindigkeit fliegt (und auch keine Kurven), dann ist die einzig auftretende Beschleunigung die Erdbeschleunigung. Wenn Du so einen Sensor parallel zur Erdbeschleunigung ausrichtest, mißt er 1 g, bei antiparaller Ausrichtung -1 g. Senkrecht zur Erdbeschleunigung kommt 0 g heraus. Wenn Du in 3 Achsen die Erdbeschleunigung mißt, kennst Du die Orientierung des Flugzeugs zur Erdoberfläche. Die Beschleunigungssensoren der ADXL-Serie von Analog sind wirklich nett. Gruß Gerd
also bei einem (echten) Segelflugzeug mit großer Spannweite könnte ich mir vorstellen, daß eine barometrische Messung funktionieren könnte - rechts und links ans Ende der Tragfläche so eine Kapsel geklebt - allerdings darfs da kein Staudruck geben oder sonstwas
"Die Beschleunigungssensoren der ADXL-Serie von Analog sind wirklich nett." die schau ich mir mal an, danke!
Für (modellbau-)Helikopter nennt man sowas Kreisel oder Gyro. Ist garnicht mal so teuer. Mit 30 dürftest du dabei sein.
@Simon Eine Flugstabilisierung mit Gyroskopen wird im Modellbau häufig eingesetzt, und ist wirklich ziemlich preiswert. Aber Gyroskope messen nur eine Drehung, nicht jedoch die absolute Lage im Raum. Eine Ausrichtung parallel zur Erdoberfläche ist mit Gyroskopen nicht möglich, sehr wohl aber das Halten. Gruß Gerd
Warum nicht? Der Raum hat 3 Achsen und wie Du die Kreisel montierst (vorausgesetzt sie sind dafür geeignet), ist doch Deine Sache. Arno
Ein Kreisel ist aufgrund der Drehimpulserhaltung lagestabil. Er hält also die vorgegebene Lage über eine längere Zeit. Wo "oben" und "unten" ist, "weiß" ein Kreisel nicht. Ein Kreisel versucht sich einer Lageänderung entgegenzusetzen (mal einfach ausgedrückt), deshalb können wir beispielsweise Fahrradfahren. Ich würde mich über eine längere Zeit nicht auf einen Kreisel bzw. auf ein einfaches Gyroskop verlassen. Gruß Gerd
Hallo, ich hab mal was von Kreisel in Verbindung mit optischer Regelung gelesen. Ich glaube die hatten 2 Kreisel einmal auf Querruder und einmal auf Höhe. Und zwei einfache optische Sensoren wahrscheinlich mit Fototransistoren an den Tragflächenenden, danach hat sich das Modell am Horizont ausgerichtet und die Kreisel haben es stabil gehalten. Ähnlich der Miniroboter die einer Linie folgen mit zwei Fotosensoren. Bei Kreiseln hast du den Vorteil die können direkt an die Servos. Mike
Am besten wäre wohl die optische Methode mit IR-Sensoren. Da gibt es auch schon fertige "Autopiloten", welche den Flieger am Horizont ausrichten. Das soll ziemlich gut funktionieren, auch in ungünstigem Gelände. Mit GPS wurde sowas mal gemacht. Allerdings mit Militär-Empfängern, die zentimetergenau messen. Kreisel allein sind nur bedingt geeignet, da sie ziemlich schnell driften, was man irgendwie kompensieren muss. Ansonsten empfehle ich die diversen Roboterforen, wo sowas häufiger diskutiert wird, sowie Google-Suche nach "IMU", "INS" usw. Achim.
Was verstehst Du unter `längere Zeit` bei einem Modellflugzeug? Oder geistert immer noch das "autonome Schneetaxi" durch das Forum? Da es wie so oft im Leben nichts Vollkommenes gibt, müssen auch die Kreisel in gesteuerten Luftfahrzeugen nachgeregelt werden. Arno
Es gibt in echten Fliegern sowas, das sich INS (inertial navigation system) nennt und im Schnitt niemals mehr als 15Seemeilen Abweichung pro Stunde liefern sollte (bei der üblichen reisegeschwindigkeit also Mach 0,80 oder so was). Das ist schon relativ genau, aber ein bissle abweichung gibts immer. (so ein System ist aber teurer als ein kleines Privatflugzeug !!!) Für ein Modellflieger bin ich mir nicht so sicher, ob du da ein genaues System bauen kannst, ohne dass das ganze zu schwer und zu teuer wird. Hier hat sich einer sowas ähnliches fürs Auto gebaut, allerdings nciht zum Navigieren. Es könnte trotzdem helfen: http://www.myplace.nu/avr/accelr8/index.htm
also erstens wäre es schön wenn es auch aus nicht perfekten Fluglage (z.B. Pilotenfehler, Funkkontaktabriß u.ä.) selbstständig eine stabile Fluglage einnimmt... und längere Zeit heißt das es eine halbe Stunde stabil sein soll... d.h. wenn ein µC die Daten eingegennimmt soll es meinetwegen möglich sein eine Platzrunde mit definiertem Radius eine halbe Stunde fliegen zu lassen - oder eben eine gerade Strecke, mit 4 Kurven ist egal weil bei großen Bögen von sagen wir mal 1 km Durchmesser ohnehin die GPS-Positionsbestimmung nachregeln müsste... das hat mit Fluglage erstmal nix zu tun
3 ist die Zahl der Wahl. Mit 3 Kreiseln ist die Lage im Raum bestimmbar. Für 30 min dürften auch die Modellbaupiezos hinreichend genau sein. Auch das INS bezieht seine Informationen nur aus Kreiseln und Beschleunigungsaufnehmern. Allerdings kann er sich im Modellflieger keine Geräteredundanz leisten und muß auch auf die Überlagerung mit anderen Navigationsverfahren verzichten. Arno
kann man nicht ein flugzeug nehmen was von sich aus eine stabile Fluglage einnimmt... Das mit den Modellflugzeugen scheint irgendwie in mode zu kommen... Das wird siche nur über längere Zeit funktionieren wnn man mehrere Sensortypen vergleicht. Echte Flieger haben auch vieles dreifach. Also Kreisel, Barometer (Variometer), hell/dunkel, ADXL-irgendwas, Kamera um Horizont zu finden, GPS+Kartenmaterial um Hangwinkel am Boden zu kennen.... Das meiste davon muss trotzdem beim Start genullt werden.
Hallo, ich hab mich schon immer mal gefragt, wie diese IR-Autopiloten genau funktionieren. Weis da jemand was genaueres? Kann man sowas auch selbst bauen? Gruß
Was passiert mit den primitieven optischen Sensoren, wenn man zufällig in Österreich wohnt(Da wo ich wohne gibt es nicht mal Hügel, nur Bäume). Kippt das Flugzeug dann einfach seitwärts ab, wenn man an einem Berg entlangfliegt, oder wenn man dicht neben einem Wald fliegt?
Meiner Meinung nach ist die Methode mit dem Horizont mit abstand am besten - solange man nicht nachts fliegt. Im Prinzip könnte man eine einfach Kamera (Sowas solls ja auch zum Verbauen in Hobby-Schaltungen geben...), die nach vorne guckt, einbauen. Die Software wertet das Bild nun nach dem Helligkeitsverlauf aus: - Richtung des Helligkeitsverlaufes ist senkrecht zum Horizont - Dort, wo die Helligkeit sich auf kürzester Bilddistanz ändert, ist der Horizont - Dort, wo es heller ist, ist oben Solange man nicht allzunahe an Hügeln fliegt, sollte das relativ gut klappen, auch bei schlechtem Wetter und evtl. sogar bis lange nach Sonnenuntergang. Gruss Michael
Jep, Schnee ist dann grosser Mist. Aber schliesslich stellt Schnee bereits für "echte" Piloten eine grosse herausforderung beim Fliegen - speziell im Gebirge und wenn es um Hochgebirgslandungen geht - dar. Wie soll da ein relativ einfacher Autopilot noch mitkommen? ;-)
Wie funktioniert eigentlich der künstliche Horizont im Flugzeug? Ist das nur eine Kugel mit einem schweren gewicht?
bei einem braunschweiger army shop gibt es die trägheitskreisel von der russischen at3. wär das ne möglichkeit? http://www.ranger-online.com/trade/productview/2753/351/?Lang=de http://www.ranger-online.com/trade/productview/2754/351/?Lang=de
Die sehen so massiv aus, dass das Flugzeug mit dem Ding sicher nicht mehr Abstürzt, weil es eine super Bodenhaftung hat :-)
Typisch russisch, zu schwer, und zu Groß. Bist du schon Modellflieger? Dann gehe auf deinen Platz, leih dir von deinen Kumpels 2 oder 3 Kreisel, steck die zwischen die Servos und flieg ne Runde. Da wirst du sehen wie genau das ist und was du noch brauchst. Mike
Hallo, ich fürchte das Problem ist gar nicht so trivial wie ich dachte. Wahrscheinlich braucht man tatsächlich alles: Kreisel (um das Flugzeug künstlich träger reagieren zu lassen da die Dinger bei böigem Gegenwind sogar manuell extrem schwer zu steuern sind, habe das mal bei Windstärke 4 erlebt - bei Böen ist es extrem gestiegen und danach jedesmal in ein Windloch gefallen - mit dem Wind zu fliegen war einiges leichter) Barometer (Steig/Sinkflug) GPS (Flugrichtung) und die Beschleunigungssensoren... + µC zum Auswerten von dem ganzen hm ist doch jede Menge Entwicklungsarbeit Trotzdem danke für die Anregungen werde mal ein bißchen weiter googeln
Hallo, ich glaube das meiste ist hier schon geschrieben worden. Bin selber mal Helikopter geflogen........Modell natürlich ;o) Mit einem Kreiselsystem kommst Du schon sehr viel weiter. Die Dinger sind sehr empfindlich und können dein Flugzeug sehr sicher in der gleichen Fluglage halten. Damit das Flugzeug immer in der Horizontalen bleibt, da hab ich mal ein Optisches System gesehen, welches unter das Flugzeug montiert wird. Das war gar nicht teuer. Aber ob das gut funktioniert und wo man das kaufen kann...bin ich leider auch überfragt. Gruß Mario
Hallo Leute, da ich selber Flieger bin, halte ich von dem außschließlich Kameragesteuerten Ansatz nicht viel. Der Horizont, kann gerade in den Regionen Bergstraße, Eifel, Schwarzwald und Alpen sehr witzig aussehen. Da kanns Dir leider schonmal passieren das ein Berg dein Horizont ziemlich schief liegen läßt. Also ohne Terraindaten ist das mist. Die wirste aber höchstens mit einem IPaq komensiert bekommen, das entweder Deine Akkulaufzeit gehn Null regelt oder aber die Bodenhaftung schliechtweg zum Mount Everest werden läßt. Der in Flugzeugen fast auschließlich gemacht Ansatz, mal von den neueren A3XX und Boing > 707 abgesehen, ist der über Kreiselsysteme die an Beschleunigungssensoren gekoppelt sind. Der Hintergrund der Beschleunigungssensoren ist der Drift, den die Kreisel bei starken Boen erfahren. Segelflieger kennen das als Aufwind und auch eine Boing kann schonmal in weak turbulenzes kommen. Dabei werden die Kreisel durch die dabei auftretenden Impulse aus ihrere Ruhelage gebracht und driften weg. Da ein Modellflugzeug IMHO aber nicht sooo starken Aufwinden ausgeliefert ist, würde ich zu einem 3 Kreiselsystem tendieren. Du mußt allerdings dann auch alle drei Ruder beweglich haben. Der Stationärekreisflug wird bis 30° Schräglage eh mit neutralen Rudern geflogen und dafür brauchst Du normalerweise keine Kreisel. Das Flugzeug stabilisiert sich da von selbst. Was Du vielleicht noch regeln könntest wäre der schiebefreie Flug. Wird normalerweise durch eine Libelle gemacht. Metallkugel in ein gebogenes Plexiglasrohr stecken und mit zwei Näherungssensoren durch Ruderausschläge in der Mitte halten. Damit verhinderst Du das Trudeln und verringerst die Abbkippneigung. Schiebeflug ist so mit die Hauptsache fürs Abkippen oder Trudeln, es sei denn da hat gerade jemand Spaß dran. Kommt bei Segelfliegern öfters vor, Motorflieger mögen das garnicht! Viel Spaß beim basteln. Gruß MArcus
Hier nochmal ein Link für die Infrarot-Variante: http://www.nongnu.org/paparazzi/infrared.html Das System scheint zuverlässig zu sein. Angeblich sogar nachts einsetzbar. Ausnahmen sind Canyons, stark bebaute Terrains und starker Nebel. So steht's zumindest im Paper...
Hi, kennt ihr die Seite schon? http://www.rotomotion.com/prd_IMP.html Kennt jemand diesen Sensor von Analog Devices? ADXRS401 (Drei stück kosten 105 USD) http://www.analog.com/en/prod/0%2C2877%2CADXL311%2C00.html ADXL202 (Drei stück kosten 19.14 USD) http://www.analog.com/en/prod/0%2C2877%2CADXRS401%2C00.html Mit Frachtkosten und grob gerundet wären das 150 US Dollar = 122.941 Euro Ich denke das ist ein fairer Preis. Mit der ADXL-Familie habe ich sehr gute Erfahrungen gemacht, deshalb denke ich dass mit diesen Senosren ein recht preisgünsteiger Trägheitsnavigationssystem durchaus machbar wäre. Und vor allem ist es ein sehr interessantes Projekt. Gruß Zoltan
Hallo, Du hast sicher gesehen das der ADXRS401 ein 32pin BGA Gehäuse hat, ist nicht ganz einfach zu löten. Und die +-75 Grad/s sind auch nicht besonders viel. Die in den Modellbau Kreisel eingesetzten Sensoren (zB murata, ENC-03) haben +-300 Grad/s. Ob der keinere Messbereich ausreicht, kann ich jedoch nicht sagen. Gruß, Sebastian
Hi Sebastian, es stehen vier Sensoren zur Auswahl. Wenn du eine Seite weiter runter-scrollst siehst es: ADXRS401 ±75(°/s) 35.00 USD ADXRS150 ±150(°/s) 39.50 USD ADXRS300 ±300(°/s) 39.50 USD ADIS16100 ±300(°/s) ?? USD mit SPI Anschluss Ja, das Gehäuse ist der Hacken drann. Wenn sich keine bessere Lösung finden lässt bleibt immer noch die Möglichkeit das Gehäuse mit dem Rücken auf ein standard IC-Sockel zu kleben und die Kontakte mit Kupferlackdraht bis an die Sockel-Anschlüsse zu verlängern. Als info moch die Funktionsweise des Gyro's: http://www.analog.com/library/analogDialogue/archives/37-03/gyro.html Gruß Zoltan
Hallo, OK, das hatte ich übersehen. Ein weiteres Problem wird jedoch noch der Preis sein. Deine Angabe gelten für Stückzahlen >1000. Wenn man die Sensoren günstig bekommen kann, hätte ich auch Interesse. Gruß, Sebastian
Nein, "meine" Preise gelten für kleine Stückzahlen. Wenn du auf die Preise draufklickst werden diese in einen Warenkorb übernommen. Dort steht dann, was sie für diese kleine Mengen verlangen. Wir könnte ja eine Sammelbestellung machen. Ab 25 Stück sinkt der Preis für den ADXRS300ABG als Beispiel von 39.50 auf 35.00 USD. (das wären 3.70 EUR Ersparniss pro Teil). Aber ob sich das für eine Sammelbestellung lohnt?
Ich denke nicht das sich der Aufwand für 3,70 lohnt. Ich werde mir mal in Ruhe das Daenblatt anschauen. Ein wichtiger Punkt ist die Temperaturdift, da habe die murata-Sensoren schlechte Karten. Sebastian
Hi, hatte mir voriges Jahr von Rotomotion den 6DOF-IMU Bausatz gekauft. Bis jetzt habe ich ihn noch nicht im Flieger eingesetzt, aber auf dem Schreibtisch funktioniert er schon. Leider ist das Ding ein bisschen klobig, da bis auf die ADXL202 nichts in SMT gemacht ist. Daher wäre ich auch an einer kleineren Variante interessiert. Man sollte das Projekt aber nicht unterschätzen. Der Controller macht noch ne ganze Menge Mathematik, um die Signale abzugleichen. Aber wenigstens gibt es die Software schon: http://autopilot.sourceforge.net/ Achim.
Die Gyros's haben eine integrierten Temp. Sensor mit einer Auflösung von 8.4 mV/°C. Die Beschleunigungssensoren haben hinigegen keinen, obwohl sie auch sehr stark mit der Temperatur driften. Dazu habe ich einige Messungen gemacht: http://n.1asphost.com/zgrad/Lageregler.htm (die Schaubilder ganz unten rechts) @Achim Vielleicht ist es auch gut, wenn man an manche Sachen etwas blauäugig heran geht, denn wenn man von vornerein wüsste, wie viel Arbeit dahintesteckt, würde man erst gar nicht anfangen... ;-) Dein Link ist Klasse: Dort gibts die ganze Source-Code zum Download, sogar mit Matlab-files: https://sourceforge.net/project/showfiles.php?group_id=36164 PS: Eine Art "auf eine Sockel löten" macht Analog Devices auch:http://www.analog.com/UploadedFiles/Evaluation_Boards/Tools/9303074ADXRS150EB_0.pdf
Hallo, kleiner Tipp am Rande: Das Erdmagnetfeld steth Euch allen kostenlos zur verfügung! Mittels eines Sensors "KMZ51" und der geeigneten elektrischen Schaltung kann der parallele Flug zur Erdoberfläche erkannt werden. Es entstehen dabei zwei Grenzwerte welche Schaltungstechnisch erkannt werden und für die entsprechenede Regelung der Ruder verwendet werden können. Bei Raketen wird so etwas ebenfalls eingebaut.
Hallo, @Zoltan Wie hast Du die Kurven für die Temperatur-Kompensation aufgenommen? In den SMM-Kreiseln für den Modellbau sind Elemente drin die deutlich weniger Probleme mit der Temperatur haben. Einen Link muss ich nachreichen. Diese sind jedoch teurer. Sebastian
@Harald Das Thema mit dem Kompass hatte ich schon mal: http://www.mikrocontroller.net/forum/read-1-68172.html#173517 Entsanden ist daraus ein Matlab-Simulink Modell: http://www.mikrocontroller.net/attachment.php/147331/Overview.gif Das Problem dabei war, dass die ADXL202 nur in Ruhe einen fernünftigen Wert für die Neigung liefern. Die Neigung braucht man um den Messignal der drei KMZ51 zu korrigieren und daraus die Himmelsrichtung berechnen zu können. Meine Idee wäre deshalb gewesen den Kompass mit der Trägheitsnaviagtion zu koppeln. Allerdings ist es eine echt gute Idee, wenn man nur das Horizontale messen will, die KMZ51(gibts bei Conrad) zu benutzen. Dann hat man keine probleme mit der Beschleunigung in den Kurven und bräuchte somit auch keine weiteren Sensoren (nur die drei KMZ51). Das einzige Probelm ist, dass das Magnetfeld eventuell von Hochspannungsleitungen usw beeinflusst werden kann, aber das wäre auch nicht das ideale Fluggebiet. Ich denke die Erdmagenfeldmessung könnte die beste Lösung für Dierk sein. @Dierk Schau dir den Link an, den ich hier oben gepostet habe. Dort findest du auch viele Datenblätter mit sehr ausführlichen Beschreibungen zur KMZ51. @Sebastian Nach dem verstärken des analogen Ausgangssignals des ADXL202 auf 0..4 V (4V wegen single supply Operationsverstärker, die sehr viel billiger sind im Vergleich zu Rail-To-Rail OpAmps) habe ich diese Spannung mit einem ATMEGA8 (Aref 4V) digitalisert, dann über die RS232 Schnittstelle an den PC geschickt und anschließend in Excel oder Matlab geplotet. Im ATMEGA8 habe ich eine Tabelle hinterlegt, der für jeden Temperaturwert einen passenden Korrekturwert zum Messsignal hinzuadiert hat. Das wäre eigentlich nicht nötig gewesen, da der Zusammenhang zwischen Temperatur und Messfheler linear ist, wie man auch an den Diagrammen erkennen kann. Die Temperaturkompenastion ist somit sehr einfach: - Sensor aus dem Kühlschrank holen ;-) - Dann unter der Stehlame Erwärmen - Die gemessene Temperatur und die Abweichung des Messignals zum PC schicken - daraus Tabelle für Korrekturwerte oder Gleichung definieren. - Tabelle, Gleichung in µC hinterlegen Guß Zoltan
Ich habe bis jetzt nur Erfahrungen mit dem ADXL213 gemacht (PWM Ausgang). Ich möcht erwähnen, dass Beschleunigungssensoren "leider" auch Vibrationen messen. Ich könnte mir vorstellen, dass während dem Flug Vibrationen auftreten. Man müsste jedoch überprüfen, ob diese einen relevanten Einfluss auf den Sensor haben. Gruss chrigu
Wie es aussieht kann man bei Analog Devices nicht ohne Umsatzsteuer-Identifikationsnummer ICs bestellen (abgesehn von Samples) Ich habe aber die Sensoren bei http://www.digikey.com/scripts/DkSearch/dksus.dll?KeywordSearch (unter Suchen eingeben : ADXRS300ABG-ND ADXRS401ABG-ND ADXRS150ABG-ND) gefunden. Dort kostet eine ADXRS401 42.00 USD anstelle von 35.00 USD bei AD. Weiß jemand, wie groß Versandkosten und Zollgebühren oder was da noch alles anfällt, werden können? Bei Digikey kostet ein 500g Packet per UPS anscheinend $136.00?? (https://sales.digikey.com/US/help/ship_cost_int.shtml) Kann ich eventuell die Umsatzsteuer Identifikationsnummer meiner FH-Angeben?? ;-)
Danke, die Seite hab ich auch heute morgen entdeckt. Das sind ja Preise gepfefferte Preise (vielliecht sinds doch Griechen dies halt gepeffert mögen und halt nebenher Gyros verkaufen. :-) ) Zum Thema Erdmagenfeldmessung hab ich mir ein paar Gedanken gemacht. Wenn man mit drei KMZ51 die Richtungesvektor des Erdmagnetfeldes bestimmen kann, dann ist es mit Hilfe von Rotationsmatritzen möglich die Orientierung des Flugzeuges zu bestimmen. Dafür muss man vor dem Flug das Flugzeug z.B. nach Norden ausrichten und in eine horizontale Lage bringen. Dabei merkt sich die Elektronik die Richtung des Erdmagnetfledes. Also erhalten wir einen Vektor aus den drei Sensorsignalen. Sobald das Flugzeug nach dem Kalibrieren bewegt wird, verändert sich der gemessene Richtungsvektor. Also hat man nun zwei Daten zur Verfügung: Den gespeicherten Kalibrierungswert [a,b,c]_kalib und den aktuellen Messwert [a,b,c]_mess. Durch eine Art Umkehrung der Rotationsmatrix kann man nun die drei Winkel berechnen, um die das Flugzeug grad bewegt wurde -> phi(roll), theta(pitch) und psi(yaw). Ich habe die Gleichungen im Matlab aufgestellt und etwas getestet. Sie müssen auf jeden Fall für einen µC noch vereinfacht werden aber theoretisch ist die Bestimmung der Orientierung möglich. Wenn man das Erdmagnetfeld so messen kann, wie ich es mir vorstelle und es in einen Vektor überführt werden kann, und das Erdmagnetfeld auf dem Flugfeld konstant ist, dann wäre das die Lösung. Man bräuchte keine weiteren Sensoren und die Fliehkräfte wären auch belanglos. Was meint Ihr zu meiner Theorie?
Hi, ich finde das schon toll was ihr hier alles für Lösungen und Vorschläge habt, ich kann mir auch vorstellen, das das eine oder andere funktionieren wird. Ich seh es schon kommen, das Flugzeug fliegt und fliegt und fliegt, bis es keiner mehr wiederfindet. ;o) Ich weis nicht was gegen ein Kreiselsystem spricht ? Einfach zwischen die Servos klemmen, mischung einstellen, fertig. ich dachte auch nie, das ich Heli flliegen könnte, da hat man gleich eine Achse mehr die man steuern muß. Den Kreisel (einer) hatte ich dann für den Heckrotor genommen, damit der mir das Drehmoment vom Hauptrotor und eventuell Störungen vom Wind entgegenwirkt. Auf höchster Empfindlichkeit war ein drehen des Helis auch mit Gewalt gar nicht mehr möglich. Viel Spaß beim fliegen !
Zum Magnetfeldsensor: Wie empfindlich ist der auf eventuelle Magnetfelder aus der Elektronik(Motor, Kabel)?
Man merkt bereits eine leichte Veränderung des Magnetfeldes (Sensorsignal ist bereits verstärkt), wenn man mit einem magnetisierten Schraubenzieher auf 15..20 cm an den Sensor heran geht. Das gleiche gilt auch für einen Elektromotor, bei dem noch ein durch die Magnetfelder des Motors hervorgerufenes Rauschen als Störung hinzukommt. Man muss jeden Sensor an das jeweilige Fahrzeug/Umgebung anpassen: http://www.semiconductors.philips.com/acrobat_download/applicationnotes/AN00022_COMPASS.pdf Seite 27: "INTERFERENCE FIELD CALIBRATION". Ich würde trotzdem keinen Elektromotor direkt (20cm)neben dem Sensor betreiben.
Wenn man die Motorstörungen raus hat muss man auch noch darauf achten, dass man die Änderung zwischen hoher und niedriger Belastung herausfiltert. Die Kabel verursachen schließlich auch ein Magnetfeld "Ich weis nicht was gegen ein Kreiselsystem spricht ?" Vielleicht ist es das Weglaufen, was so negativ an einem alleinigen Kreiselsystem ist.
Hi, ok, ein Kreiselsystem kann das Flugzeug nicht 100%ig lange stabiel halten....aber macht fliegen nicht erst richtig spaß, wenn man auch kurven oder lupings fliegt ? Ich glaube das Problem ist ein anderes, es geht nicht ums fliegen, sondern ums Basteln...selber was machen. Stimmts ? Geht mir auch oft so, nur nicht mehr im Bereich Modellbau, sondern mehr in der Adtronomie. www.Grimm-Mario.de PS: Oben ist bisher noch keiner geblieben, die kommen alle wieder runter ;o)
ADXL Beschleunigungssensoren werden des öfters im 10er Pack bei Ebay angeboten. Im Moment wohl nur die ADXL 202. Ich habs mit den KMZ51 aufgegeben einen Kompass zu bauen (waren verdammt empfindlich - sogar eine leuchtene LED in 2cm Abstand hat die gestört), wenn hier aber eine robuste Schaltung zustande kommt um so besser :-)
Moin! Für den KMZ51 gibts ne Applicationnote zum Bau eines Kompaß. Vielleicht hilft das ja weiter... Gruß
Hi, was haltet ihr von Quecksilberschaltern? Wenn man davon einige geschickt anordnet kann man doch die lage messen, oder? Armin
@Armin: Setz Dich mal gedanklich mit einer Wasserwaage in ein Kettenkarusell. Was zeigt sie an?
Angenommen man würde eine Stunde exakt nach so einem elektronischen Gyro fliegen, wie groß wäre dann nach dieser Stunde die Abdrift? (Vorausgesetzt das ding wird nicht durch selbst gemachte Magnetfelder gestört: Wie genau sind die elektronischen Kompasse eigentlich so? Besser als 5 ° wäre ja schon gut zu gebrauchen.
@Karl Die Genauigkeit von Gyros ist in erster Linie eine Preis- und Platzfrage. Mechanische Kreisel sind eben durch die Mechanik mit einem starken Handikap versehen. Faserkreisel mit über 100m Lichtleitfaser sind da schon wesentlich genauer und die Piezokreisel liegen irgendwo dazwischen. Die richtigen Werte kannst Du nur aus den jeweiligen Spezifikationen des Kreisels entnehmen. Dann kommt das Problem des richtigen Einbauorts noch dazu. Wenn Du Zeit genug hast und nicht dummerweise in einem Flugzeug sitzt, das permanent aktuelle Daten braucht, kannst Du einen nordsuchenden Kreisel verwenden, der sich selbständig exakt nach geografisch Nord ausrichtet. Handelsübliche elektronische Aldikompasse liegen bei 5°, da hast Du recht. Kreiselgestützte Kompasse (Radiokompass) sind bestimmt auf unter 1° zu kriegen. Allerdings taucht hier wieder das monetäre Problem auf. Wie gesagt, Herstellerspezifikationen checken und versuchen durch guten Einbau auch zu erreichen, Arno
Da kommt noch die frage nach dem Drift. Wie lange fliegen die, ohne dass der Flieger versucht sich immer vertikal auszurichten?
@ Arno Kannst du etwas über die Drift von handelsüblichen Piezokreiseln sagen? Was würde z.B. ein im Seitetenwind schwebender Modellhubi nach 15 Minuten machen?
Ich habe mich lange nicht mehr damit beschäftigt. Die Spezifikationen müssten aber über den einschlägigen Handel zu bekommen sein (Graupner, robbe, Schlüter Simprop usw). oder bei google: http://www.ifp.tuwien.ac.at/institut/lva/skripten/0Einfuehrungsvortraege%20Physik%20I%20WS2003/Gurker.pdf http://pdv.cs.tu-berlin.de/~musial/ams98.pdf http://www.dopero.de/Eingang/Kite_Aerial_Photography/kite_aerial_photography.html http://www.elektronische-messtechnik.de/index.php?MGID=22 http://www.pacificsites.com/~brooke/Sensors.shtml http://www.colorado.edu/ASEN/SrProjects/Archive/2003-04/PDR/USAS.pdf Arno
Hi, also ich habe die Gleichungen für die Erdmagnetfeldmessung hergeleitet und in ein in Simulink modelliertes U-Boot(http://n.1asphost.com/zgrad/Bilder/AUV/AUV_sim.jpg) zum testen "eingebaut". Ein Atmega8 braucht bei 16 Mhz für diese Berechnung fast 5 ms. Das Probem ist, dass es einen Frieheitsgrad zu viel in der Gleichung gibt. Ich denke dass daher die Gleichung nur für einen Fahrzeug geignet ist, der um eine Achse stabil sein ist. Z.B. ein Gewichtsstabiles U-Boot das nicht um die Längsachse "rollt" . Dann ist es möglich das Neigen und Gieren(Kompass) zu messen. Eine genauere Auswertung folgt noch. @Arno Zum Gyroscope: Kennst Du die Preise zu den Sensoren unter deinem Link http://www.elektronische-messtechnik.de/index.php?MGID=22 ? Gruß Zoltan
Nein, habe nur ein wenig google beschäftigt. Ich habe zur Zeit ein etwas anders Arbeitsgebiet. Arno
Hallo, oben wurde schon mal was von eigenstabilen Flugzeug geschrieben, ein normales Anfängermodell "Hochdecker" ist eigenstabil. Mit 2/3 Gas muss das so getrimmt sein, das es von alleine geradeaus fliegt, sonst ist das Modell sch... gebaut. Es ist der Wind, der das Modell aus der Bahn wirft. Aber selbst wenn es mal Schräglage hatte, geht es von allein in die horizontale, letztendlich geht das in Richtung Autopilot. Oder soll es ein UFO Modell werden, das ist dann entsprechend anspruchsvoller. Da würde ich mal die Modellfliegerseiten abgrasen. Mike
Hallo, ja ich habe ein "eigenstabiles" Modell, Hochdecker mit V-Flügeln... wenn kein oder nur leichter, gleichmäßiger Wind da ist gibt es auch kein Problem: man kann die Fernsteuerung komplett ins Gras legen... aber nicht lange sonst ist das Modell außerhalb der Reichweite das Problem der Fluglage stellt sich sobald man den Flug "automatisieren" und z.B. einen µC Platzrunden fliegen lassen will... bevor der was regelt sollte er "einigermaßen Bescheid wissen" wie das Modell gerade in der Luft liegt - das war zumindest meine Überlegung - und die Regelung braucht ja auch ein Feedback - ich denke das ist besser als das Modell nur mit festen Grenzwerten "blind" zu regeln (da es keine Querruder hat braucht es etwas bis es anhand der Seitenruder in Schräglage kommt - und bis es aus einer geflogenen Schräglage wieder zu normalem Flug zurückfindet)
Hallo Dierk, ich weiß nicht ob Du Dich schon entschieden hast, aber ich wuerde vermutlich mit einem ADXL202 gehen. Wie beim komplizierteren Verfahren per Magnetfeldmessung (und allen anderen auch) ist die Lagemessung natuerlich mit Ungenauigkeiten behaftet. Vibrationen können recht einfach herausgefiltert werden, und für Deinen Anwendungsfall dürfte auch die beim (außerplanmäßigen) Kurvenflug auftretende Beschleunigung eine Regelung in die Horizontale nicht unmöglich machen. Und Du kannst Dir aussuchen, ob Du die Beschleunigung als Frequenz oder Analog geliefert bekommst. Viel Erfolg, leif
hab da nochmals was gefunden http://pdv.cs.tu-berlin.de/MARVIN/ http://pdv.cs.tu-berlin.de/~musial/rob2000b.pdf
Hallo, diesen Geistesblitz hatte ich 2003 auch einmal und das ist dabei herausgekommen: http://www.ame-strobel.de/_temp/sp.wmv Mein System regelt zwei Achsen, es arbeitet auf Basis der Erdgravitation und ist in eine konventionelle RC-Anlage eingebunden, mit der sich die Quer-/Längsachneigung stimmulieren läßt. Mehr möchte und kann ich im Moment noch nicht veröffentlichen. Nun mache ich mich an die Flugerprobung.
ja sieht schon recht gut aus!!! aber allein mit erdgravitation(beschleunigungssensoren) is es ja nicht getan, bei flugobjekten kommt noch dazu dass sich das fluggerät dreht beschleunigt abbremst.... dazu brauchst du noch minimum Kreiselsensoren zusätztlich ach ja wenn man bei google unter "flugregelung" sucht findet man recht viel http://fmr.ilr.tu-berlin.de/Lehre/flugregelung.htm http://www.uni-stuttgart.de/akaflieg/flitedac.htm naja und wenn einer zu viel geld hat ein buch http://www.amazon.de/exec/obidos/ASIN/3540418903/qid=1119902487/sr=8-1/ref=sr_8_xs_ap_i1_xgl/028-2534091-4984539
@ Jochen in der Tat - so lange sich das System in einer horizontalen Bahn bei konstanter Geschwindigkeit bewegt ist es soweit kein Problem, aber jede Richtungsänderung oder Bewegung in einer Kreisbahn macht das Sytem orientierungslos - also muß ich über die Kompensation dieser Störfaktoren nachdenken ! Freundlichst Harry
Kurzer Nachtrag: Nach fast vier Wochen und etlichen Emails und Anrufen habe ich grad die Auftragsbestätigung von spoerle.com für drei ADXRS401ABG und jeweils eine ASXL102 und ADXL203 erhalten. Der Preis ohne MWST und Leiferkosten belaufen sich für die fünf Sensoren (genau genommen sinds sechs Sensoren) auf 155 EUR. Gruß Zoltan
Hallo Zoltan wie siehts mit deinem Projekt aus?? wird das für dein uboot oder willst du ein UAV bauen :) ?? was studierst du eigenltich in Ulm? @all wie siehts bei euch so aus? Gruß Jochen
Angehängte Dateien:
-

ADXRS401.jpg
64 KB

Hi Jochen, Ich studiere Maschinenbau an der FH. Ich will ein U-Boot bauen, welches sich leichter transportiern lässt. Und ja, es soll ein "autonomous underwater vehicle" werden. Studierst du zufällig auch in Ulm? @Gerd Mit viel Geduld. Ich habe um die zwei Stunden für das Anlöten von 16 Kupferlackdrähten auf den Sensor gebraucht. Diese Kügelchen auf der Rücksetie bestehen aus Lötzinn, welche sich sehr gerne mit dem Nachbarkügelchen verbinden ;-). Deswegen musste ich schon mal eine ganze fertige Seite wieder auslöten. Zum Löten benutze ich eine recht grobe Lötspitze, vergleichbar mit der Spitze einer Kugelschreibermine. Anschliessend habe ich den Sensor mit Heißkleber auf einem normalen IC-Sockel geklebt. Auf dem Sockel sind auch die sieben Kondensatoren aus dem Application Note (http://www.analog.com/UploadedFiles/Evaluation_Boards_Tools/641887514ADXRS401EB_0.pdf) untergebracht. Das ganze sieht zwar nicht so profesionell aus, wie in dem APN, aber es funktioniert zufrieden stellend. Noch ein Nachtrag: Der ganze Spass hat nun komplett mit Versand und MwSt 189,85 EUR gekostet. Gruss, Zoltan
Angehängte Dateien:
-

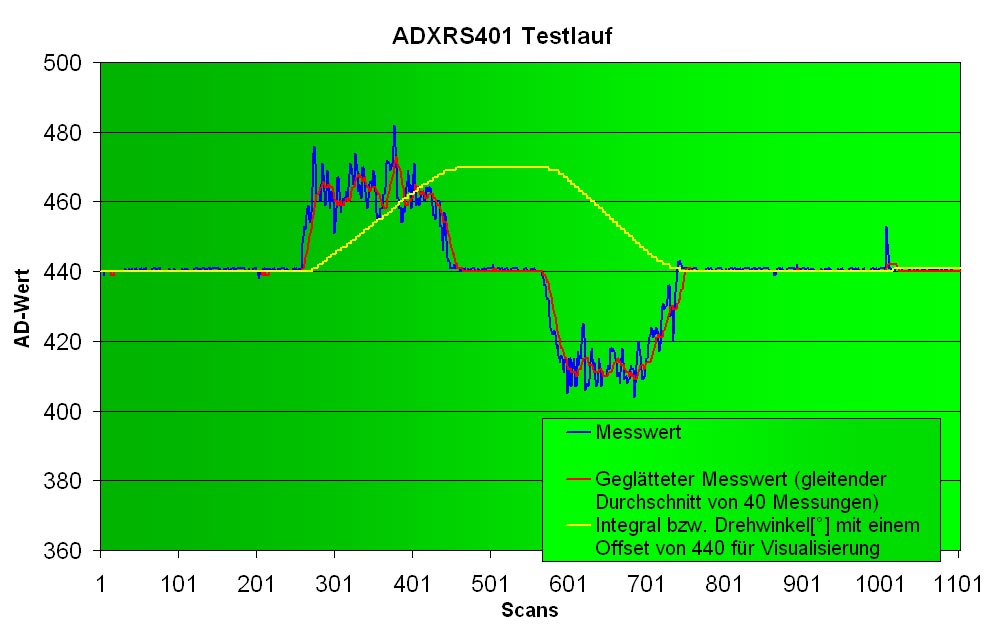
ADXRS401_Testlauf.jpg
71 KB
{kind=link}
{kind=link}
Als Test habe ich den Ausganssignal des Sensors direkt an den AD-Wandler eines Atmega8 angeschlossen. Das Ergebniss einer Rotation mit ungefähr 15°/s um 30° nach links und wieder um 30° nach rechts sieht man im Anhang.
Hallo Zoltan, danke für die Info. Aber Deine Lötaktion werde ich mir nicht antun ;-) Die Signale schwingen und sind verrauscht. Woran liegt das? Ok, das Rauschen kriegst Du durch die Mittelung heraus, aber das periodische Signal bleibt. Gruß Gerd
Ich würde mir das Löten auch nicht antun, wenn ich nicht ein armer
Student wäre :(
>Die Signale schwingen und sind verrauscht [..] periodische Signal
bleibt.
Ich habe das Steckbrett per Hand rotiert. Du kannst einen Selbstversuch
machen und Deine Maus auf dem Tisch ganz langsamm drehen; Daher kommen
die Schwingungen.
Hallo zoltan ne studier an der fh-kempten elektrotechnik, bin mal auf deine seite gestoßen als ich mit den adxl202 einem Freund bei seiner Facharbeit "Orientierung im Raum mittels Beschleunigung" geholfen hab.(ist aber schon so 2 Jahre her) Und dein uboot ist echt wahnsinn!! Und wenn's vielleicht möglich ist würd ich's mir auch gern mal in aktion anschauen. Wohn nähmlich nähe Memmingen also gar nicht so weit weg :) die videos hab ich schon angeguckt @gerd ich denke zoltan hat einen servo oder ähnliches verwendet, und dieser läuft vielleicht nicht ganz rund/schwingt und das ist dann eben auf dem bild zu sehen also viel glück noch Gruß Jochen und wenn mal wieder mit deim uboot tauchen gehst würd ich mich über eine email freuen Jochen.Gerster@stud.fh-kempten.de
@Zoltan: 16 Drähte in zwei Stunden sind ein gutes Tempo! Hast Du evtl. schon mal Informationen eingeholt, wieviel es kosten würde, den ADXRS401 professionell einlöten zu lassen - also PCB-Herstellung und Bestückung? Hm, für eine IMU brauchte man 3 davon. Dann noch 2 ADXL202 und vielleicht noch ein 3D-Magnetometer. Dazu ein ATMega128 und Hühnerfutter und das alles auf ca. 10 cm³ (4 x 2.5 x 1 cm) mit 10 g Gewicht und das MUAV (Micro Unmanned Aerial Vehicle) rückt in realisierbare Nähe. Ich frag gar nicht erst, was das kostet :-( Achim.
@Jochen Ich kann Dir nichts versprechen, aber wenn ich dran denke schreib ich Dir ne Mail. @Achim, ich habe mich noch nie erkundigt, wo man Bauteile professionell einlöten könnte, oder wie viel das kosten würde. Kennst Du zufällig eine gute Adresse hierfür? Es gibt übrigens auch einen Evaulations Board für 65 EUR + Mwst bei Spoerle.com. Das währen dann 30 EUR für das Einlöten und einen Sockel mit ein paar Kondensatoren. Als Magnetfeldsensoren benutze ich den KMZ51(5,09 EUR) von Conrad. Ein Atmega128 kostet bei Elektro-Nix 7,29 EUR (ich warte allerdings seit zwei Wochen auf die Lieferung -> Saftladen???) Also mit 250EUR wärst Du dabei.
Ich bin sicher daß die einfachste und billigste Lösung für eine Langzeit-Flugbahnstabilisierung eines Modellflugzeuges ein kleines GPS ist. Evtl. noch ergänzt mit einem Höhensensor. Aus dem GPS gewinnt man die Flugrichtung und Geschwindigkeit über Grund. Man muß allerdings zunächst einen Vollkreis fliegen damit man Richtung und Stärke des Windes berechnen und über eine Korrektur die Vektoren subtrahieren kann. Da das Modellflugzeug, wenn es sauber gebaut ist bei mittigem Seiten bzw. Querruder geradeaus fliegt kann man eine Richtung, und somit auch eine Querlage, dadurch halten daß man die Abweichung von einem gewünschten Kurs mit der entsprechenden Verstärkung, auf das Seiten bzw. Querruder gibt. Drehgeschwindigkeitskreisel mit einer Langzeitgenauigkeit sind für Amateure unbezahlbar. Man kann zwar sehr gut Drehgeschwindigkeiten dämpfen und (nach integration) Lagen stabilisieren aber die Kreiseldrift muß man über die Fernsteuerung selbst kompensieren. Solange man das Modell sieht ist das überhaupt kein Problem da man gar nicht weiß ob man eine Drift korrigiert hat oder einen Knüppelausschlag gemacht hat um eine kleine gewollte Kurve zu fliegen. Der Magnetkompaß wird im Modellflugzeug Schwierigkeiten machen, es sei denn man fliegt damit in Äquatornähe, weil das Erdmagnetfeld in Europa unter ca 60 Grad Schräg durch die Erde dringt und dadurch erhebliche Fehler entstehen wenn man mehr als 20 Grad Rollage hat weil man mit einer arctang Funktion aus der Feldstaerke von zwei rechtwinkligen eingebauten Magnetfelsensoren die Richtung bestimmt hat. Ich habe sonst mit dem KMZ51 gute Erfahrung gemacht und man erreicht mit einer Korrektur des Magnetfeldes am Einbauort durchaus Genauigkeiten von ca. +-1 Grad Ich kann vermutlich für einige Fragen zu diesem Themenkreis Hilfestellung geben da ich 15 Jahre in der Flugregelung von Hubschraubern gearbeitet habe.
Hallo Michael, könntest Du die Schaltung, welches Du für den KMZ51 benutzt Veröffentlichen? Mich würde vor allem der "Flipping Generator" interessieren. Hast Du vielleicht die Schaltung aus dem KMZ51 Application Note benutzt? (http://www.semiconductors.philips.com/acrobat_download/applicationnotes/AN00022_COMPASS.pdf) Ich habe mich vor einem Jahr auch mit dem KMZ51 auseinader gesetzt. Es ist damals ein Matlab Model daraus entstanden (http://www.mikrocontroller.net/attachment.php/147331/Overview.gif) Ich konnte aus Zeitgründen das Projekt nicht abschliessen. Deshalb sind mir noch mehrere Sachen unklar: >arctang Funktion aus der Feldstaerke von zwei rechtwinkligen eingebauten Magnetfelsensoren -Warum benutzt man nicht drei Magnetfeldsensoren? -Kann man mit Quaternionen das Problem des atan eventuell umgehen?
Ich könnte die Schaltung veröffentlichen. Es ist aber im Prinzip genau der Aufbau wie er in den App-Notes von Philips veröffentlicht wurde. Matlab kann ich mir als Rentner nicht leisten, ist aber auch nicht erforderlich wenn man die Schaltung verstanden hat. In dem Aufbau sind zwei sehr clevere Ideen verwirklicht. 1) der Sensor wird immer nur im Nullpunkt seines Meßbereiches benutzt so daß die Temperaturabhängigkeit seiner Verstärkung nicht zum Tragen kommt. Es wird dazu ein Strom erzeugt der so stark ist daß er das am Meßort in der Meßachse anliegende Magnetfeld zu Null kompensiert. 2)Durch ständigen Vorzeichenwechsel des Sensors (mit nachgeschalteter phasenempfindlichen Gleichrichtung) werden alle Nullpunktfehler des Sensors eliminiert. Wenn Du einen Dritten Sensor benutzt nuezt dir das vermutlich nur etwas wenn Du die wirkliche Gesamt-Feldstaerke kennst. Die ist aber nicht konstant und ändert sich etwa um den Faktor 2 je nachdem wo Du dich auf unserem Planeten befindest. Ich kenne keine Quaternionen aber es handelt sich nicht um ein Berechnungsproblem sondern du Misst beispielsweise ein stärkeres Feld weil Das Flugzeug in einer Kurve ist und der Sensor sich der 60 Grad Neigung des Magnetfeldes angenäert hat.
Hallo, na läuft das system nun? wahrscheinlich nicht. Ich habe zwar nicht studiert bin aber seit 30 Jahren beruflich in dieser fachrichtung tätig. Gyros driften weil sie Raumstabil sind d.H. die Erde drecht sich unter ihnen weg!!!!!!!!! Dies kann man kompensieren z.b. mit der sogenannten Breitenschraube die entsprechend des Breitengrades die 15 grad pro Stunde der Erddrehung kompensiert. Allerdings muss man sich vor Augen halten das ein Flugzeiug sich Dreidimensional über eine Kugel bewegt und deshalb auch andere Achsen betroffen sind. Ich habe einen dieser Hell/dunkel Autopiloten fürs Modellflugzeug dieser Funktioniert recht ordentlich. Auch diverse Kreisel um den Faktor Boe zu kompensieren habe ich genutzt, ist alles ganz net aber richtig Autonom wirds erst wenn man wirklich alle 3 Achsen mittels Kreisel überwacht, alles was dann driftet mittels Diesem Hell/Dunkel Autopilot kompensiert und per GPS die Strecke abfliegen lässt. Ist von einzelnen Entwicklern gemacht worden ein Modell ist tatsächlich über 3000 Km geflogen und am Startort wieder angekommen. Prinzipiell kann man auch das Erdmagnetfeld nutzen da sich die leichten Magnetstäbchen immer entlang der Feldlinien ausrichten. Aber durch Beschleunigung Kurvenflug usw. werden sie beeinflusst und ein Pilot lernt schon zu beginn seiner Ausbildung dies zu berücksichtigen und entsprechend eine Kurve früher oder später auszuleiten um seine Flugrichtung zu steuern. Hoffe ihr habt ein wenig dieser komplexen Thematik verstanden. Willy
Bitte melde dich an um einen Beitrag zu schreiben. Anmeldung ist kostenlos und dauert nur eine Minute.
Bestehender Account
Schon ein Account bei Google/GoogleMail? Keine Anmeldung erforderlich!
Mit Google-Account einloggen
Mit Google-Account einloggen
Noch kein Account? Hier anmelden.