Also ich würde mir gerne einen "Asuro Clone" mit einem dsPIC30F4011 bauen. Mit folgendem Unterbau: http://www.conrad.de/ce/de/product/191491/ROBOTER-FAHRGESTELL-BAUSATZ Als Batterie werden aber 2x Plastik AAA Halter für 9V benutzt (Parallel). Da ich den gerne auf 5V benutzten würde. Für die Spannungsregelung wird ein LM2576T mit kompletter Beschaltung verwendet. Und als Motortreiber ein L298. Mein Frage wäre nun: beide Spannungsregler werden mit 9V betrieben (beide brauchen anscheinend mindestens 7V bzw. 8 V). Die Motoren machen aber nur 3V mit (zumindest habe ich keine andere Aussage gefunden), was mach ich da nun am besten? Größere Motoren? Einfach eine 3V Z-Diode am Motor Parallel geht ja net, der muss sich ja in beide Richtungen drehen. Oder aber ich benutze die Standart 3V (der PIC läuft damit), nur was mache ich dann mit dem Motortreiber, bräuchte ich da einen neuen (wenn ja was würde passen)? Außerdem würde ich dann direkt noch : http://www.conrad.de/ce/de/product/191360/ASURO-ULTRASCHALL-SATZ-FUeR-ARX-03/2420181&ref=list mitkaufen aber finde nichts zur Spannungsversorgung. Verträgt das Dingen 5V oder nur 3V?
>Mein Frage wäre nun: beide Spannungsregler werden mit 9V betrieben >(beide brauchen anscheinend mindestens 7V bzw. 8 V). >Die Motoren machen aber nur 3V mit (zumindest habe ich keine andere >Aussage gefunden), was mach ich da nun am besten? Die Motoren kannst Du verwenden. Fahr einfach mit einer PWM von 30%.
Also einfach nur über die PWM die Spannung unten halten? Naja gut darf ich mich beim Proggen nur nicht vertun und erst nachmessen bevor ich die anschließe :D Aber ansonsten würde das mit meiner Spannungsversorgung klappen? Wie sieht es mit dem Sensor Modul aus und wie schlimm ist es wenn ich später noch einen Servo mit an die 5V hänge? Hab davon gelesen, dass die Störungen verursachen die dem PIC schaden können. Und mir ist noch etwas eingefallen der original Asuro hat sowas mit Aufklebern auf dem Zahnrad. Bruacht man das und wenn ja wie funktioniert es? Womit werden die Schwarz/Weiß Signale aufgenommen?
>Naja gut darf ich mich beim Proggen nur nicht vertun und erst nachmessen >bevor ich die anschließe :D So empfindlich sind die Motoren nicht. Die halten schon ein paar Minuten durch. Am L298 hast Du sowieso 2V Spannungsabfall. Ich habe die selbe Chasis und bis jetzt ist noch nichts durchgebrannt. Deutsche Entwickler sollten mehr Mut haben;-)
Ich habe als Motortreiber diese Platine bestellt: http://www.ebay.de/itm/L298N-Dual-Stepper-Motor-Driver-Controller-Board-Module-/170667758621?pt=LH_DefaultDomain_0&hash=item27bc97541d#ht_5349wt_907 ich habe mir nun überlegt ob ich den 78m05 gegen einen größeren 5V 1A to252 http://www.conrad.de/ce/de/product/156886/SPGREGL-TS2940CP50-RO-TSC-TO-252/SHOP_AREA_17336&promotionareaSearchDetail=005 austausche. Vorteil wäre ich spare mir den LM2576T mit der kompletten Beschaltung (die Spule und den großen Elko) , da ich dann einfach von dem 5V Anschluss der Platine meinen PIC und den US-Sensor Versorgen würde. Meine Frage ist nun geht das oder gibt es Störungen auf dem PIC dann? Außerdem reichen die 1A ? Wenn nein, wo finde ich einen mit der selben richtigen Bauart der mehr kann (beim großen C find ich keinen anderen)? Und ich werde aus dem Datenblatt des TS2940CP50 nicht so ganz schlau. Reichen die 9V zum Betrieb oder nicht? Da steht was von Vout+5V=Vin aber über dem fallen nur 600mV @1A ab. Wenn Vout+5V=Vin stimmt gehen dann vielleicht trotzdem 9V fehlt ja nur 1V ? EDIT: Vout+5V=Vin scheint ein Copy+Paste Fehler zu sein. Habe bei Conrad das Datenblatt geöffnet dort steht anders als in dem mit Google gesuchten, Vout+1V=Vin dann würde es ja gehen.
Der L298 ist für die Motoren etwas überdimensioniert. Es reicht ein L293D, der ist auch einfacher zu verbauen. >http://www.conrad.de/ce/de/product/191491/ROBOTER-FAHRGESTELL-BAUSATZ Hier eine Schaltung, mit der ich die Chasis schon gesteuert habe: http://www.hobby-roboter.de/forum/viewtopic.php?f=4&t=131 ( Die Chasis habe ich dann aus Kostengründen aber durch 2 Motoren ohne Getriebe ersetzt )
Ich weiß das der L298 Überdimensioniert ist aber das ist ja egal er ist auf der Platine ja schon verbaut. Mir ist gerade nur noch eingefallen das ich auch noch einen Servo mit der 5V Versorgung betreiben wollte. Reichen für den dsPIC die US-Sensoren die Steuerung des L298 und einen Servo die 1A? Wenn nein bekomm ich vll auf den Platz des to252 eine andere Bauart drauf die mehr als 1A liefert oder aber weiß jemand einen Baustein der in der Bauart mehr als 1A liefert (beim C nix gefunden!).
Bitte schaut auch mal hier: http://www.roboternetz.de/community/threads/55363-Asuro-Profis-Brauche-kurz-Hilfe! Sind zwar fast die gleichen Fragen, aber irgendwie kann mir keiner Antworten geben. Und da ich langsam verwirrt werde mit den ganzen Foren bzw. vll weiß jemand von Hier antworten auf Fragen von da.
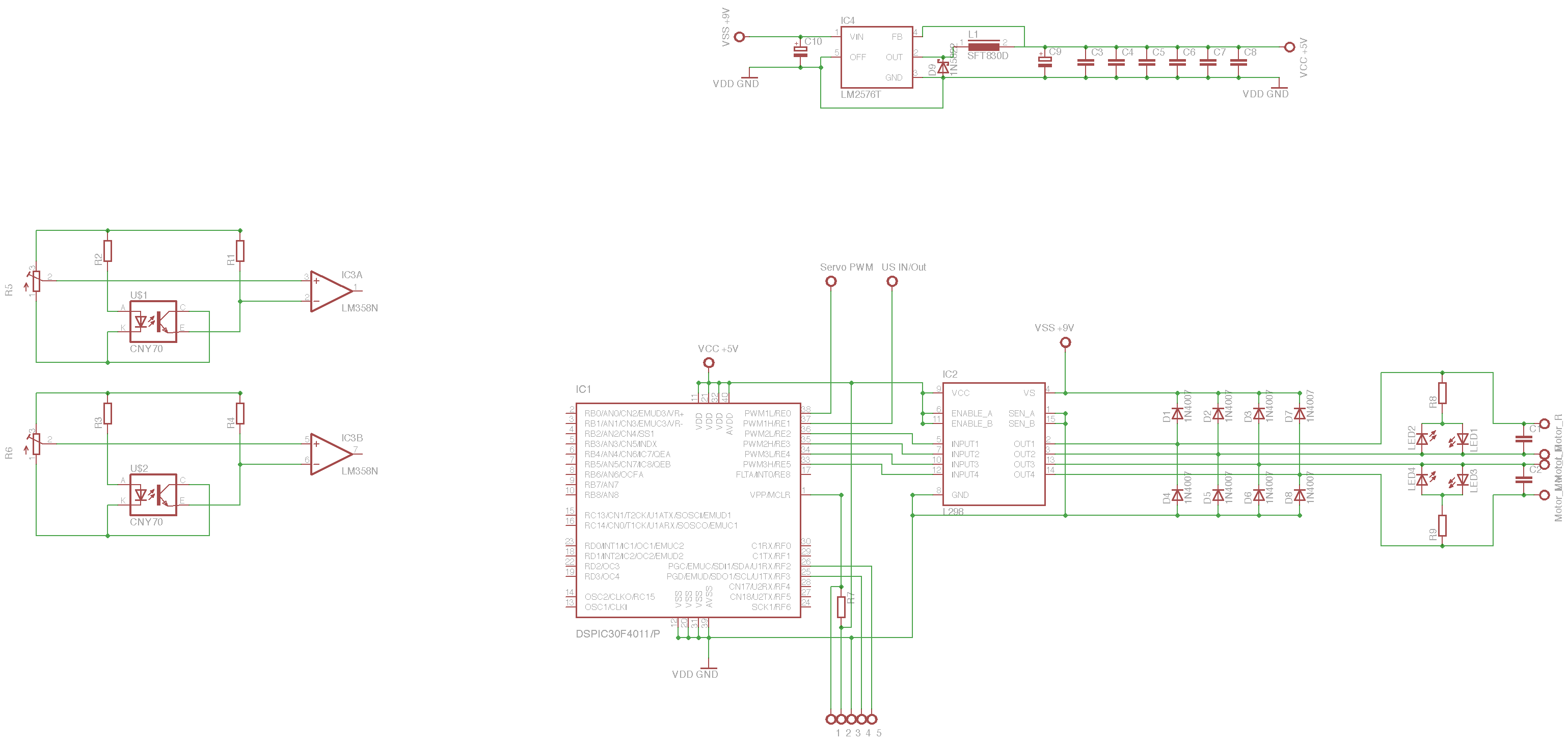
So eine Teil meines Schaltplanes für den Clone habe ich fertig. Den Schaltplan gibt es hier (Eagle Schematic): http://dl.dropbox.com/u/41631856/Asuro_Clone.sch Bitte schaut mal drüber ob es soweit schonmal geht. (Die Werte sind bisher noch nicht eingetragen kommt später noch.) Mein Frage wäre nun wo schließe ich am besten meine 2 CNY Schaltteile an (ist für die Odometrie oder kann ich mit denen auch den Drehgeber Eingang des PIC Benutzen?)? Außerdem soll noch ein Linienfolger (2 Osram Fototransistoren und eine 5mm LED Rot (low current)) und ein paar grobe Abstandssensoren (Osram IR-Fototransistoren mit IR LED nebendran) später hinzugefügt werden, am besten über eine Schaltung die je nachdem welcher Fototransistor schaltet eine andere Spannung an einen AD-Eingang des PIC liefert (dachte an eine Art Widerstandsnetzwerk) (maximal 5 IR/Transistor Blöcke oder weniger wenn es nicht geht, zB. 3 vorne 2 nach hinten ). Und eventuell später einen RC-Reciever und vll. eine Verbindung zu einem PIC18F4553 zum Daten Austauschen. Daher stellt sich nun die Frage was schließe ich am besten wo an!? Oder sollte ich vll noch mit Schieberegistern die Ein/Ausgänge erweitern? Achja ist es besser einen externen Quarz zu verwenden mit Kondensatoren oder lieber den internen? (Also ich meine gibt es mit dem internen und der Genauigkeit später Probleme mit dem z.B. SRF?)
Angehängte Dateien:
-

Asuro_Clone.png
32 KB
Da ich irgendwie oben kein Bild nachträglich anhängen konnte hier nochmal:
Angehängte Dateien:
-

Asuro_Clone.png
35 KB
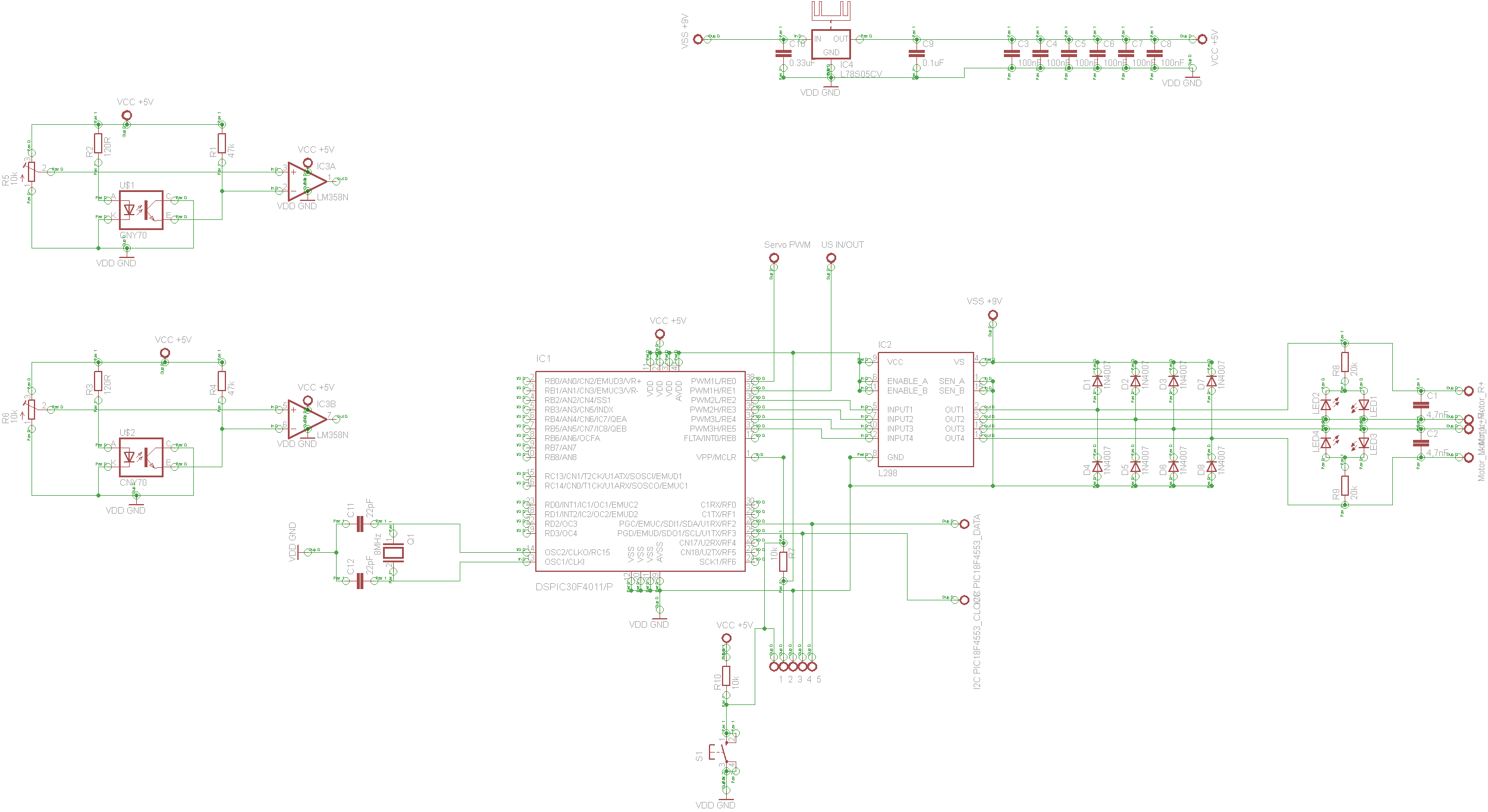
So die neuere Version des Schaltplans. Aber wo ich nun die anderen Sachen anschließe weiß cih immer noch nicht.
Die 1N4007 als Freilaufdioden hinter dem L298 sind keine so gut Wahl. Der L298 ist auch für die Motörchen reichlich groß. Die Operationsverstärker für die Lichtschranken wird man so nicht brauchen einfach nur eine Komperatorfunktion ohne Hysterese bekommt man auch am µC pin, und den Pegel kann man über den Widerstand einstellen. Wenn man 5 V zur Verfügung hat, kann man die 2 IR LEDs der Lichtschranken in Reihe schalten - das spart Strom. Der µC hat eigentlich genug Pins frei - da muss man nicht noch per Schieberegister mehr Eingänge schaffen, vor allem wenn man später Teile noch auf einen 2. µC auslagern will. Der dsPic30 ist nicht unbedingt die beste Wahl für Batteriebetrieb und gilt eher als Stromfresser.
Angehängte Dateien:
-

Asuro_Clone.png
35 KB
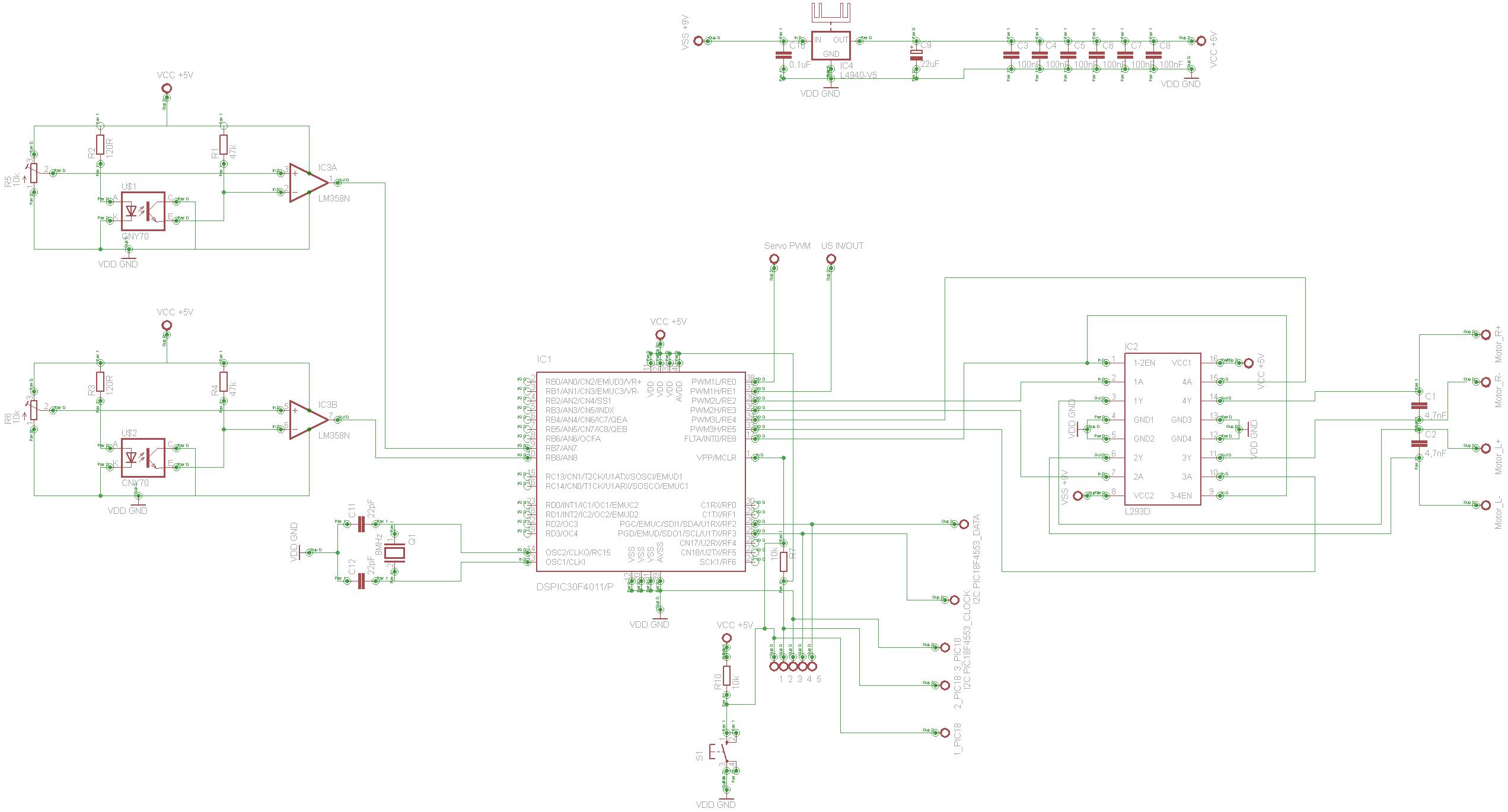
Also, habe noch einmal was geändert. 1. Low Drop 5V Spannungsregler 2. L293D habe nun doch noch in einer Nachlieferung von Reichelt welche hinzugepackt. Daher nun dieser (die Dioden beim L298 sind übrigens fest (ist eine Hong Kong fertig Platine, war günstiger als der L298 bei Conrad allein)) 3.Am dsPic kann ich nichts ändern habe hier nur 3 Typen: 1.PIC18F4553 2.dsPIC30F4011 3.(sofern das Sample ankommt) PIC32MX220 (DIL) von daher ist es Nr.2 geworden. 4.Ich habe bisher die Odometrie dinger noch nicht geändert, kann ja leider beim PIC nicht die Schmitt-Trigger Grenzen einstellen hoffe das es durch den Komparator besser geht. Die LED's habe ich noch nicht hinter einander geschaltet weil ich dann eine recht große Strecke zwischen den beiden ziehen muss (der eine ist ja Rechts der andere Links) habe nun überlegt ob ich die beiden (und den LM358N) abschaltbar mache also den Kompletten Versorgungszweig abschalte. Würde das mit einem einfachen Transistor gehen? BC337/BC327 oder ein anderer den ich im NPN Sortiment von Pollin finde(habe leider keine FET's außer ich finde welche in einer Kramskiste/alten Platine). Oder bräuchte man dafür schon eher ein Relais? Der Drehgeber Eingang des PIC's ist nicht nutzbar oder? Habe ja keine Möglichkeit Graycode mit den CNY70 zu erzeugen. Und wie sieht es aus mit meinem IR/Fototransistor Abstands messung aus ? Gibt es eine Möglichkeit verschiedene Spannungen an den AD Eingang des PIC's mit 3/2 bzw. 5 Transistoren zu erzeugen?
Angehängte Dateien:
-

Asuro_Clone.png
67 KB -

Asuro_Clone_OP.png
71 KB
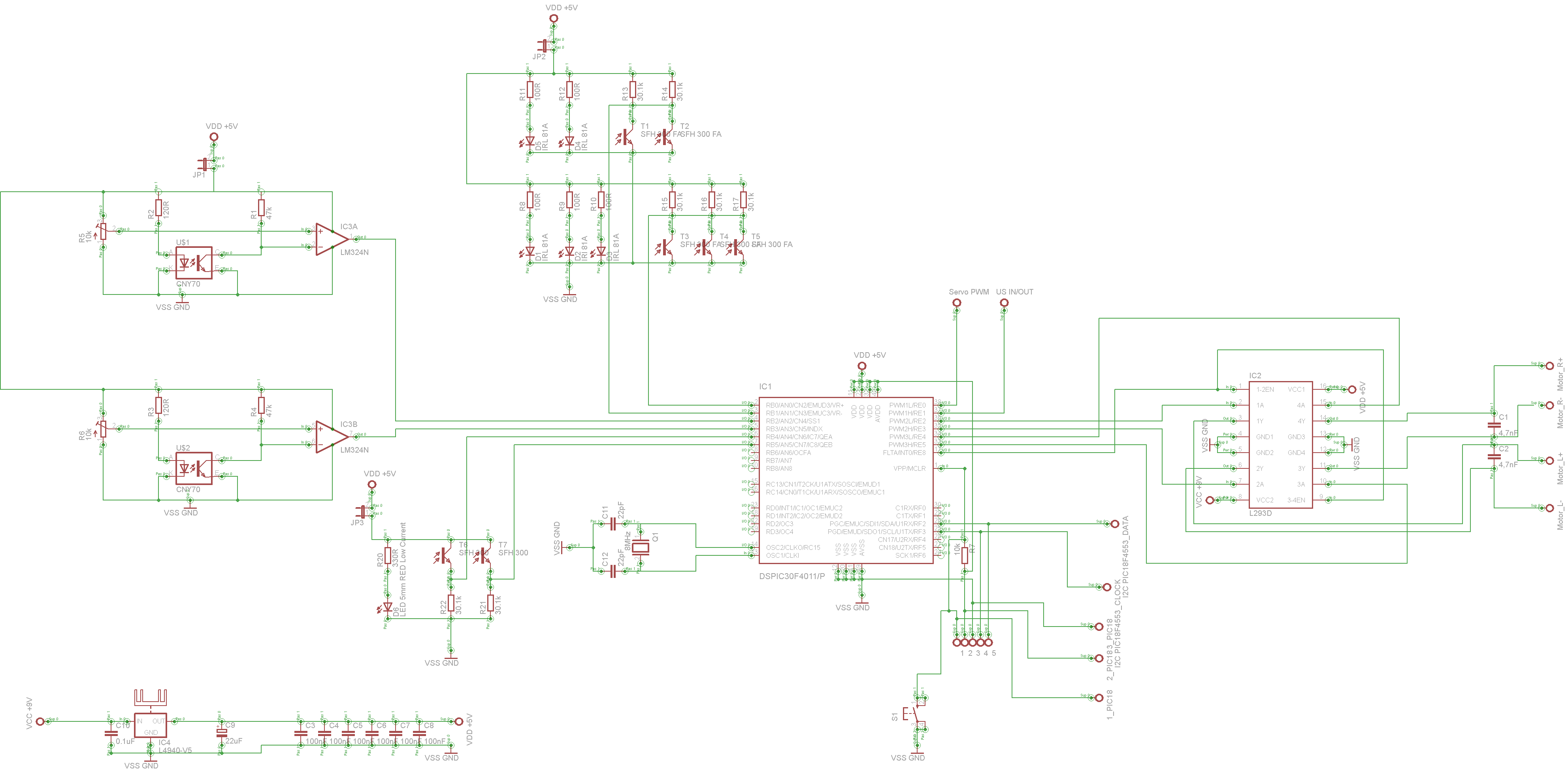
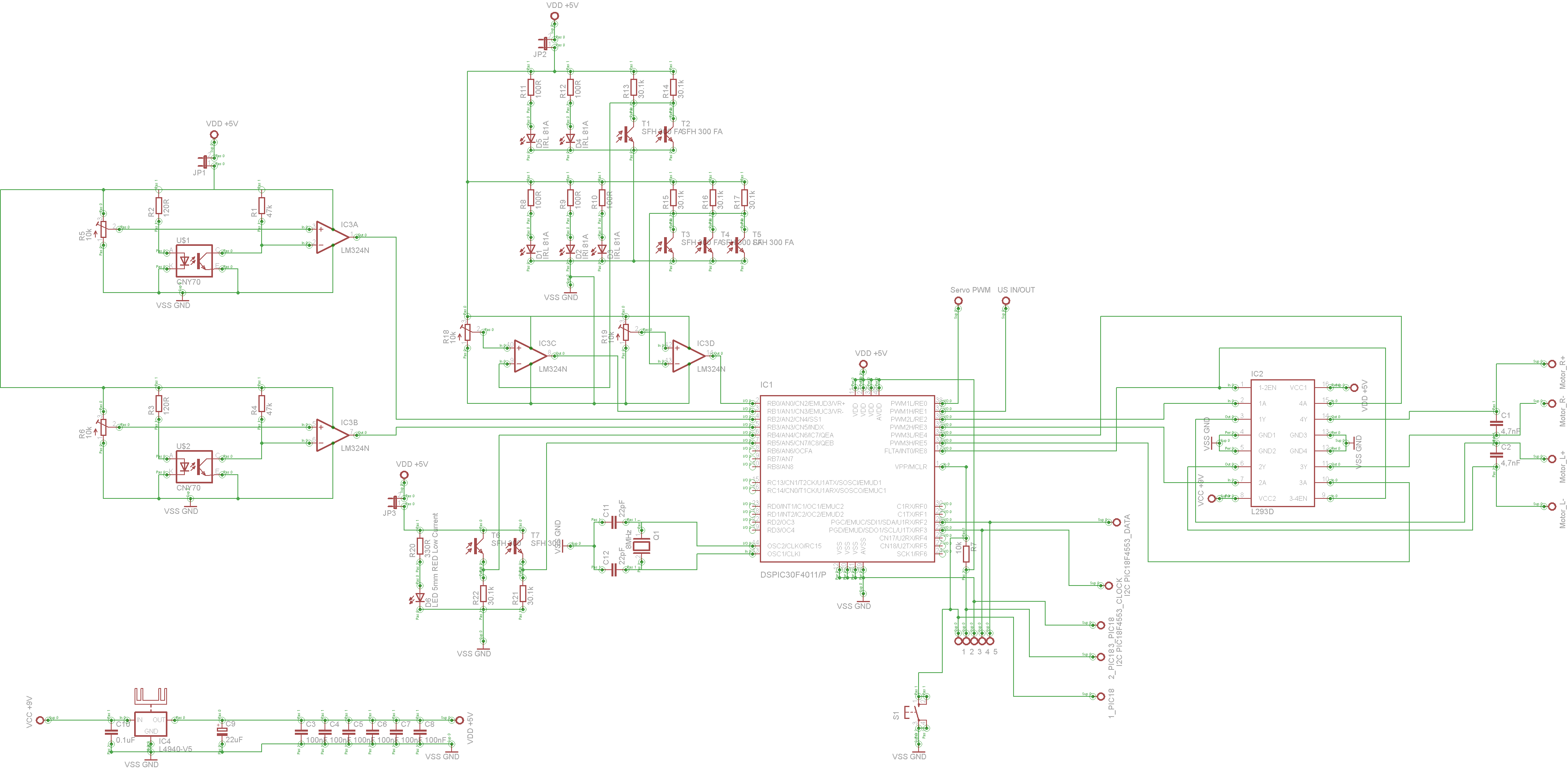
Also, dies wäre nun meine Fertige Platine. Die ganzen SFH300 FA sollen praktisch Berührungslose Schalter sein die Anzeigen wenn der Asuro Clone fast irgendwo gegen fährt. Die eine Version der Schaltung ist mit einstellbarem Komparator die andere ohne. Bei der ohne würde ich mit den A/D Eingängen die Spannung messen und dann je nachdem welche Spannung anliegt (müsste noch die Widerstände an den SFH300 FA ändern damit bei jedem eine andere Spannung abfällt) soll der Asuro Clone dann erkennen wo er bald gegenfährt (also Platinen Kante: wo?) Bei der anderen Version geht es nicht. Weiß noch nicht welche Version besser wäre. Das nächste wäre ich würde gerne überall wo die Jumper sitzten gerne irgendwie die Zuleitungen über den Asuro Clone steuern (Um nicht benötigte Komponnenten zwecks Stromsparens auszuschalten). Was müsste ich dort einbauen? Und geht dies mit NPN / PNP Transistoren oder brauche ich FET's? Sind die belegungen an dem PIC soweit ok? Oder hab ich mir einen PIN verbaut den man für etwas anderes besser nehmen könnte (meine die Sonder Belegungen) Die 2 mal SFH300 bei der Roten LOW Current LED sollen ein Liniensensor werden. Soll ich dort auch eine Komparator Schaltung zwischen schalten oder geht es so besser / bzw reicht dies? Sollte ich einen Externen Quarz verwenden oder reicht der intere Fast RC des PIC? Und nun die letzte Frage: Wo / Wie stell ich Eagle ein damit ich mit dem Lochraster Routen kann? Also das er nichts Mitert und nur 90° Ecken macht.
Bitte melde dich an um einen Beitrag zu schreiben. Anmeldung ist kostenlos und dauert nur eine Minute.
Bestehender Account
Schon ein Account bei Google/GoogleMail? Keine Anmeldung erforderlich!
Mit Google-Account einloggen
Mit Google-Account einloggen
Noch kein Account? Hier anmelden.