Abend, Ich habe echt Probleme mit 1.20 Version. Ich habe jetzt auf zwei verschiedenen Laptop versucht zu kompilieren und es gibt verschiedene Ergebnisse. Auf neuen Laptop funktioniert der ESP, aber nach einige Minuten die Weboberfläche wird dunkel und man kann nix machen. Auf dem alten, auf welchem auch 1.19 funktioniert het wird der ESP ständig resetted ( neu hochgefahren) Könnt Ihr vielleicht mitteilen welche Libraries soll ich benutzen? Das ist einzige Unterschied zwischen beiden Laptops, auf dem neuen habe ich neuste Bibliotheken, auf dem Alten alte.... MfG Jakub
Pato schrieb: > Hi Felix, > > I'm sharing the file that a friend sent me with the FW "trilogy" for the > r40li. He didnt mention where he got it from but it helped a lot to > bring back to life my dead board after replacing the main MCU, and saved > me like 300 euros in a new board, which would have been more or less the > price for a second hand robot like this one. Hopefully it'll help other > people too who might want to fix their unit instead of having to trash > it. The FW is "old" but better than nothing. As I said before, the MCU > replacement and flashing process was not straight forward and I would > only recommend it as a last resource when there's nothign to lose. I > don't have a Sileno city nor access to one :( It'd be nice to open a > repository with a FW collection.... > > My mower now works like new which makes it also useful for having a live > unit to play with and try to better understand the communication between > the 3 MCUs. > > Are you planning to dissasemble the dumps? I'd be very interested not > only in the communication commands but also in finding a way to steer > the navigation. I wonder if the bouncing angles are random and if it > would be possible to add little routine to fetch the next angle from. If > so, you could have a say in the navigation and make it more > deterministic, by maybe having an external system (maybe gps based) to > whisper the next bouncing angle. It still wouldn't be a "waypoint" > regulation like in the rtk gps ardumower buuut perhaps better than fully > random. > > Cheers, > Patricio Helo Pato, since I fried one of m R70li by mounting the ESP module I wolud be very grateful if we could exchange the FW dumps?? Could you share your FW's?? If anyone has some FW's I would be very thankful if they could be shared. Leute, leider habe ich mein CPU in Mainboard beschädigt. Wäre jemand so nett und könnte Software für Gardena/Husqvarna mitteilen?? Oder zumindest ein Hinweis geben, wo kännte man sowas finden. MfG Jakub
erst mal danke, folge dem thread seit "jahren" und bis auf das Aufwecken funktioniert alles. Hab einen Husqvarna 305 von 2009 mit dem weiter oben fotografierten STOP Pin auf dem Board, wenn ich den Jumper schliesse/also die pins zusammenhalte passiert im Betrieb nur: "bitte start taste drücken" --> heisst der mein Automower registriert das ABER: aufwecken kann ich den Automower damit nicht, mach ich was falsch? muss ich den pin dazu auf ein bestimmtes niveau ziehen? danke gruss markus
Hallo Markus, wenn du die 2 pin kurz zusammenhälst solltest du über die Service Schnittstelle wieder mit dem Mäher reden können. Oder konntest du was anderes beobachten ? Gruß Follow2000
Danke Follow2000 für die schnelle Reaktion! ich bin allein durch deine Frage noch ein STueck weiter gekommen, ich beschreibe kurz wo ich stand: Mäher an, Seriell funktioniert perfekt Mäher an, STOP kontakte schliessen loest ein piepsen aus und eine mmi meldung: start taste drücken Mäher sleep, Seriell antwortet nicht Mäher sleep, STOP kontakte schliessen loest nichts aus, ausser total verrueckten Traffic auf dem Seriellen RX Port. ich empfange viele nuller und zeichenkennte, der Mäher schlaeft weiter , scheint in irgendeinem limbus zu landen der ihn noch nicht weckt. --> ich messe 0-0.1V zwischen den kontakten und beide auf GND geschlossen Jetzt hast du nochmal gefragt was passiert... und ich habe jetzt mal mit OFFENEM DECKEL (also ausgeloester/gedrueckter haptischer STOP taste ) operiert ---> siehe da es funktioniert wie von dir beschrieben!!! Nochmal zusammengefasst: Ich denke mir fehlt irgendeine INFO was mit der echten MMI-STOP Taste geschehen muss. Halte ich den Deckel geschlossen, messe ich keine SPannung zwischen den beiden STOP Pins bzw sind beide bereits auf GND und ich kann ihn auch nicht mehr auf GND ziehen. mache ich den Deckel auf, funktioniert mein STOP Kontakt auf dem Board so wie ihr das oben beschreibt. --> heisst das fuer mich ich muss den echten STOP Key abstecken und verliere die NOT abschalte Funktion bzw muss den haptischen STOP dazu in reihe klemmen mit den PINS?
Hallo Markus, den Beitrag hat mich auf eine Idee gebracht. Die beiden Verbindungen für den Eingang STOP sind einfach parallel rausgeführt. Einmal auf dem MMI Stecker und einmal auf dem STOP Stecker/Eingang. Ich habe ein Board hier und habe die Aussage auch direkt überprüft -> Stimmt Wenn der STOP Taster (Deckel geschlossen) betätigt ist wird das Signal von diesem schon auf GND gezogen, das hattest du ja auch nachgemessen:-) Schade, damit kann man den Mäher dann nicht aufwecken wenn der STOP Taster auf der MMI gesteckt ist :-( Gruß Follow2000
> Schade, damit kann man den Mäher dann nicht aufwecken wenn der STOP > Taster auf der MMI gesteckt ist :-( Danke nochmal fürs bestätigen Follow2000. Kein Problem, ich hab nochmal ein 6 euro china plagiat modul von sonoff umgeflashed, mit seriellem port, 6 freien ein und ausgaengen und Relais. Mit Tasmota kann man sich dann alles so zurechtbiegen wie man den Mäher braucht. GENIAL! Jetzt bleibt noch ein Problem :( Könnt ihr mir sagen wie ihr die START Taste via Terminal/SErial emuliert? - der mäher mäht, ich sende modus home --> maeher faehrt nach hause - maeher part, laed --> maeher schlaeft ein. - ich wecke maeher ueber den interrupt/Stop pin --> maeher wacht auf - ich sende die PIN --> maeher entsperrt sich - ich aendere den modus wieder in Mähen bzw. AUTO ---> Maeher fragt nach START Taste - Was sende ich damit er beginnt zu maehen? (mit Startbefehl bzw. 02-0E-01-01-6E-03 aus der Wall-e software startet er hier nicht) Wie macht ihr das? Wenn ich den modus am Terminal aendere will er auch die "Start" Taste, diese druecke, ich schliesse den Deckel und los gehts....
ich antworte mir nochmal selbst: in Andys message von 27.12.2015 steht: > Das Rätsel um das Zustandsmodell ist auch gelöst. MMI und Aux sind > hinsichtlich Stop verodert, und hinsichtlich Start verundet. Bedeutet, > wenn die MMI im normalbetrieb ist (Modus egal), gilt: > 0e 00 Stop auslösen > 0e 01 Start > 0e 02 Home > 0e 03 Manuell > 0e 04 Automatik > 0e 05 Suchen (Sinn fragwürdig) > Wunsch neue Betriebsart wird sofort umgesetzt, wenn der Mäher nicht in > Stop ist. Also Zustand Mähen - 0e 02 -> Zustand parken. Wenn der Mäher > gestoppt ist, brauchts hernach noch ein 0e 01. > Wichtig: Wird über MMI gestoppt, kann der Startbefehl nicht nur über Aux > gegeben werden, sondern muss auch an der MMI erfolgen! der letzte satz hats in sich. heisst ich kann den mäher gar nicht mehr starten, ohne START an der MMI zu drücken, wenn ich die STOP Pins mal ausgelöst habe - das ist ziemlich meh :( ... also noch ein GPIO um die MMI:start taste auszulösen? Oder habt ihr das irgendwie anders gelöst?
Hallo Markus, Das kann ich mir nicht vorstellen. Die Kommunikation von der MMI zur Hauptplatine ist die gleiche wie auf dem AUX Port. Um das raus zu kriegen muss man sich mal lauschend auf die Sendeleitung der MMI schalten und start drücken. Dann sollte man das start Telegram herausbekommen. Einzig alleine die stop Taste geht separat auf dem Kabel an das Hauptboard um wahrscheinlich einen Interrupt auszulösen um ihn zu wecken. Gruß Follow2000
Danke für die schnelle Antwort Follow2000! auf dem seriellen Bus konnte ich leider nicht herausfinden wie der Mower den START Befehl über AUX annimmt. Es ist zum Verzweifeln. Trotzdem hier zum Abschluss meine Lösung für die Nachwelt: Sonoff DIY Esp8266 modul mit single oder vierfach Relays für < 10 euro Das hat onboad: + 1-4 relays, + min. 4 freien GPIOs + Serial RX/TX + as beste: einen Stromwandler 5-32V AC/DC -> ich habe jetzt die Starttaste direkt aus der MMI rausgemessen und rausgeführt und schalte sie via Relais. (Starttaste ist kontakt 1 und 6 an der TastaturBuchse auf der Platine wobei 1 der mit dem eckigen Löt-Kontakt ist) -> die Stop Taste hab ich genauso an einen GPIO gehängt und schalte Stop via GPIO 14. so behaelt die STOP taste ihre Notaus Funktion. Tasmota auf den ESP geflashed, Rule für den AutoMower schreiben: ON Event#wakeupstart DO Backlog Power1 1;delay 40;SSerialsend5 020C040001****B503;delay 10;SSerialsend5 020E01045103;delay 10;Power2 1;delay 10;Power1 0 ENDON (die rule in pseudocode übersetzt:) wakeupstart/stop: --> stoptaste an (power1 1) --> 4 sec (boot warten) (delay 40) --> Pin **** senden (via serialsend) --> 1sec warten (delay 10) --> home oder auto senden (via serialsend) --> 1sec warten (delay 10) --> starttaste relais 0.3 sec anziehen (Power2 1 (mit Pulsetime konfiguriert)) --> stoptaste aus. (Power1 0) Das ganze ist mit diesem Wissen ein 60 min. Projekt... mit den restlichen 3 relais, kann ich jetzt - hupen (mit dem piezo summer) - led anmachen fuer unterboden beleuchtung - stirnlampe anmachen fuer vorwaertes scheinwerfer mit einer zweiten Tasmota Rule steuere ich eine Passagenschaltung und einen Rollo für den Parkplatz.. über http/mqtt kann man den mower jetzt in jedes smarthome system der Wahl haengen. Ich denke günstiger und komfortabler gehts eigentlich nicht, deshalb ein grosses danke auch nochmal alle Vor-arbeiter seit 2015 hier im Thread.
Hi Markus. Wäre es evtl möglich hier mehr Infos von dir zu bekommen. Hätte dich ja gerne Privat angeschrieben aber da du nur als Gast angemeldet bist geht das nicht . Würde gerne wissen wie genau du alles angeschlossen hast und ob du davon evtl auch Bilder hast . Dein Projekt wurde nämlich fast alle meine Wünsche erfüllen . Mfg
Hi Markus, dein Ansatz klingt sehr vielversprechend, vielen Dank für deine Arbeit. Wie Stefan würde ich dich um noch ein paar Details bitten, zu dem Modul und der Anbindung. Fotos wären mega. Hättest du eine Link zu einem passenden ESP8266-Modul? Wenn ich das jetzt richtig verstehe, steuerst du den Mäher komplett über eine Hausautomation, oder? Sprich deine Hausautomation sagt wann er fahren soll und wann er wieder aufhören soll, indem zu zwischen Auto und Home hin und her wechselst? Sind die Timer im Mäher dann quasi auf 24/7 eingestellt, dass wenn man Auto einstellt er quasi immer mähen würde? Besten Dank im Voraus Nils
Angehängte Dateien:
-

module.PNG
1,4 MB
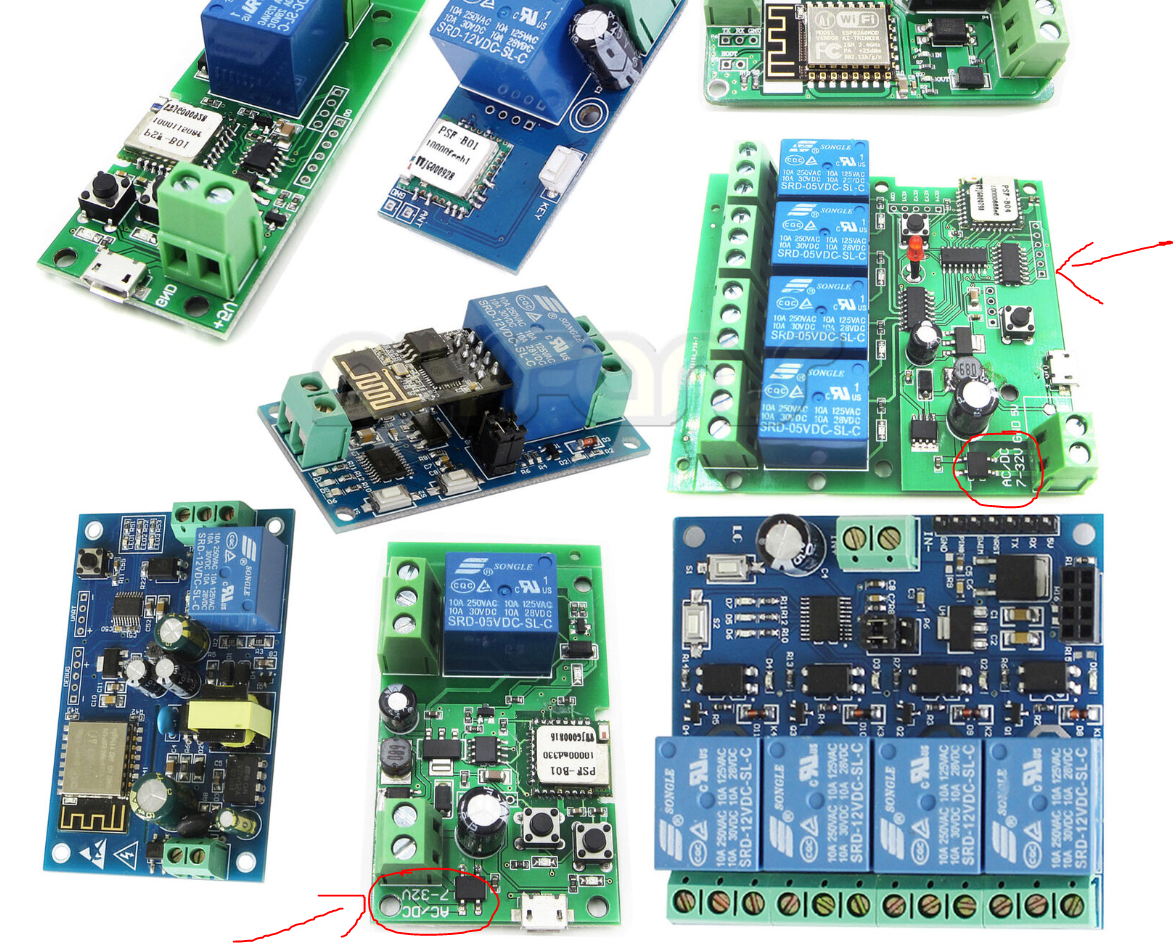
Hallo, ja genau, ich steuere den Mäher erfolgreich und komplett über die Hausautomation über AUTO und HOME. Allerdings ist mein Ziel, dass er bald komplett selbständig arbeitet und nur den batterie status an mein haus sendet. ich hab am langen Wochenende schon weitergearbeitet: + inzwischen fragt er beim dwd an ob es regnet und faehrt selbstaendig heim - weil aktuelle regenwahrscheinlichkeit+niederschlagsmenge > X + inzwischen fragt er ob das gartentörchen länger als 5 min offen ist und faehrt selbstaendig heim - weil kinder spielen Die schwellen muss ich aber noch optimieren und austarieren. Ich hab ein Bild vom Modul "PSF B01" und "PSF B04" angehaengt. Achtung es gibt viele verschiedene, ihr braucht jeweils das, dass AC/DC 7-32V auf dem Board stehen hat - das sind die mit Spannungswandler onboard. ebay : "sonoff 1 relay" oder wahlweise "sonoff 4 relay" kosten < 10 euro / modul alle esp8266 basiert Die software ist (google:) "tasmota": entweder ein fertiges release drauf flashen oder selbst kompilieren mit den gewuenschten features, danach geht alles (programmierung, logik etc) "over the air" via wifi, siehe verfügbare anleitungen. (ich verwende tasmota wegen der flexibilitaet so ziemlich fuer alles im haus) Ich schreib das Verkabeln im Maeher im Laufe der Woche gerne mal zusammen. fotos hab ich leider keine gemacht , ich finde aber bestimmt was woran ich das dokumentieren kann. Bis dann!
Hallo, da ich die Woche sonst nicht mehr dazu komme, hab ich schnell eine Anleitung runtergeballert. Ist nicht schön, steht aber fast alles drin. Wem das zu kompliziert ist, der kann gerne nochmal nachfragen. markus
Conny G. schrieb: > Hat das schon jemand probiert oder evtl auch Interesse daran den > Automower fernzusteuern? Wir habe so ein Ding - und es funktoniert recht prächtig. Ich habe die gefühlte 500 Beiträge gelesen, aber was mir noch immer nicht klar geworden ist: Was gibt es an einem Automower überhaupt Wichtiges fernzusteuern? Wer setzt sich schon in den Garten und steuert mit seinem Smartfon den Schwiegereltern um die Beine? Kann mich bitte mal wer aufklären, wo da der Sinn sein soll? LG Steffi
Hei Steffi, hehe keine schlechte Frage, aber mal umgekehrt gefragt: ich frag mich wie du den Thread hier gefunden hast , wenn du nicht auch an einer Automatisierung interessiert bist oder daran gedacht hast! Folgende Gründe gibt es für Fernsteuerung: - Komplexerer Zeitplan als nur 2 Startzeiten an 7 Tagen ( Zb Zeitfenster die Taeglich variieren) - Komplexe Grundstuecke mit Passagenschaltung (heisst man aendert die BEschaltung des Begrenzungsdrahtes indem man den Startpunkt des Maehers ausliest, man kann ihn dann Steinwege lang fahren lassen um das Grundstück in den Vorgarten) - Bei Regen ganze Mähzeitfenster überspringen und den Mäher zuhause bleiben lassen mittels Regensensor oder Wetterstation (dann verbappt der maeher nicht staendig) - Bei Regen nach Hause schicken. (Siehe oben) - Maeher parkt an schlecht begehbarer Stelle zb unter der Terasse (wenn die Kinder spielen soll er dort bleiben ohne ihn erst rausholen zu muessen, bzw soll er heim fahren ohne erst zum gerät gehen zu müssen) - Kinder haben gespielt und Spielsachen liegen lassen, Mäher sendet Warnung über Smarthome und erinnert an das Rasenfläche frei machen... - einfach weil es spass macht ihn loszuschicken. ich hab inzwischen eine billige webcam mit solar draufgeschraubt und kann wenn ich unterwegs bin zuschauen was auf meinem Grundstück passiert. Also Gründe gibt es genug, Steffi...
PS: <<-- das ist mein Benutzeraccount falls jemand fragen zu meiner Anleitung oben hat.
Hallo, ich möchte Sie fragen, ob Sie nicht einen Moment über die Mäherhardware (sileno city500) finden würden Ich möchte fragen, ob Sie eine Fotoverbindung oder Zeichnung (Wemos D1 mini = Flachkabel = Kabelkennzeichnung = Aux1) der Mäherhardware haben und ob sie an Sileno City500 angeschlossen werden kann und wie. entschuldige mein deutsche Sprache danke celi
Moin zusammen, Ich habe die Automover Version 1.20 auf den Esp32 portiert. Dazu noch den Mäher Status in Zahlen zugeordnet für eine bessere Auswertung z.b. in iobroker. Beim Wakeup habe ich noch Pin senden eingefügt nun wacht der Mäher richtig auf. Aber die Start funktion reagiert nicht so wie es soll. Da probier werde ich mal Markus Lösung probieren. Seriell an der MMi Schnittstelle bekomme ich immer einen Fehler im Display. Gibt es eine Steckerbelegung vom MMi port? Gruß Oliver
Steff schrieb: > Conny G. schrieb: >> Hat das schon jemand probiert oder evtl auch Interesse daran den >> Automower fernzusteuern? > > Wir habe so ein Ding - und es funktoniert recht prächtig. Ich habe die > gefühlte 500 Beiträge gelesen, aber was mir noch immer nicht klar > geworden ist: Was gibt es an einem Automower überhaupt Wichtiges > fernzusteuern? Wer setzt sich schon in den Garten und steuert mit seinem > Smartfon den Schwiegereltern um die Beine? > > Kann mich bitte mal wer aufklären, wo da der Sinn sein soll? > > LG Steffi Weil man heutzutage im Zeitalter von Apps auf dem Mobiltelefon nicht mehr zu seinem Gerät dackeln will um es zu programmieren, aktivieren, deaktivieren. Ich will auf dem Mobile sehen, was der Zeitplan ist, ihn verändern und den Mäher ggf. parken, weil später die Kinder spielen wollen. Oder ich sehe im Urlaub, dass der Mäher hängengeblieben ist und kann Cousin oder Schwiegereltern darum bitten ihn wieder zu befreien und zu starten. Sonst komme ich heim und hab 15cm Rasen, den ich nicht mehr gemäht bekomme, weil ich keinen manuellen Rasenmäher mehr habe. Ist ein klassisches First World Problem, aber so ist das halt bei uns :-) Ich habe ja sogar eine Remote-Steuerung meiner Rasen-Bewässerungsanlage (die fest im Boden eingegraben ist) selbst gebaut. Und da kann ich vom Mobile aus die Bewässerung starten, die dann automatisch nacheinander in 4 Zonen in der gewünschen Dauer durchgezogen wird. Ich muss also weder um meine Mäher zu programmieren noch um den Garten zu bewässern spät abends im Dunkeln durch den Garten laufen. Im Prinzip ist es dieselbe Frage, die man "gegen" Home Automation stellen kann. Wieso muss ich mein Licht etc. remote schalten oder programmieren können. Muss man nicht, aber man kann :-) Und wenn man der Typ dafür ist und ein paar Bequemlichkeiten erlebt hat - wie zum Beispiel, dass die Espressomaschine automatisch an ist am Morgen oder Mittag - dann möchte man immer mehr davon.
:
Bearbeitet durch User
Wer Automation hinterfragt hat es nicht verstanden. Heizungsautomation zb hat mir 50% Energiekosten erspart. In der aktuellen Lage auch nötig.
Daniel D. schrieb: > Jakub L. schrieb: >> Hat jemand vielleicht 1.18 oder 1.17 auf seinem Rechner und konnte >> hier frei geben für Download? > Hallo, > der Code inklusive aller Release-Versionen liegt in GitLab: > https://gitlab.com/nbrgmn/wall-e-esp8266-automower/-/tags > > Hier sind die weiteren Versionen - wäre super, wenn du testen kannst, ab > welcher Version es bei dir nicht mehr funktioniert: > * V1.15: > https://gitlab.com/nbrgmn/wall-e-esp8266-automower/-/tags/v1.15.0 > * V1.16: > https://gitlab.com/nbrgmn/wall-e-esp8266-automower/-/tags/v1.16.0 > * V1.17: > https://gitlab.com/nbrgmn/wall-e-esp8266-automower/-/tags/v1.17.0 > * V1.18: > https://gitlab.com/nbrgmn/wall-e-esp8266-automower/-/tags/v1.18.0 > > Gruß Hallo Daniel, Ich will die Versionen testen aber Ich habe errors in Arduino:
1 | ............................ |
2 | /Users/Pieter/Downloads/wall-e-esp8266-automower-develop/Wall-E_ESP8266_automower/Wall-E_ESP8266_automower.ino:6: warning: "PrgVer" redefined |
3 | 6 | #define PrgVer 1.01 // Refactoring |
4 | | |
5 | /Users/Pieter/Downloads/wall-e-esp8266-automower-develop/Wall-E_ESP8266_automower/Wall-E_ESP8266_automower.ino:5: note: this is the location of the previous definition |
6 | 5 | #define PrgVer 1.00 // Vorlage ESP8266_Robi_v2.ino |
7 | | |
8 | /Users/Pieter/Downloads/wall-e-esp8266-automower-develop/Wall-E_ESP8266_automower/Wall-E_ESP8266_automower.ino:7: warning: "PrgVer" redefined |
9 | 7 | #define PrgVer 1.02 // Web Interface HTML |
10 | | |
11 | /Users/Pieter/Downloads/wall-e-esp8266-automower-develop/Wall-E_ESP8266_automower/Wall-E_ESP8266_automower.ino:6: note: this is the location of the previous definition |
12 | 6 | #define PrgVer 1.01 // Refactoring |
13 | | |
14 | /Users/Pieter/Downloads/wall-e-esp8266-automower-develop/Wall-E_ESP8266_automower/Wall-E_ESP8266_automower.ino:8: warning: "PrgVer" redefined |
15 | 8 | #define PrgVer 1.03 // Predefined commands |
16 | | |
17 | /Users/Pieter/Downloads/wall-e-esp8266-automower-develop/Wall-E_ESP8266_automower/Wall-E_ESP8266_automower.ino:7: note: this is the location of the previous definition |
18 | 7 | #define PrgVer 1.02 // Web Interface HTML |
19 | | |
20 | /Users/Pieter/Downloads/wall-e-esp8266-automower-develop/Wall-E_ESP8266_automower/Wall-E_ESP8266_automower.ino:9: warning: "PrgVer" redefined |
21 | 9 | #define PrgVer 1.04 // Compilable version |
22 | | |
23 | /Users/Pieter/Downloads/wall-e-esp8266-automower-develop/Wall-E_ESP8266_automower/Wall-E_ESP8266_automower.ino:8: note: this is the location of the previous definition |
24 | 8 | #define PrgVer 1.03 // Predefined commands |
25 | | |
26 | /Users/Pieter/Downloads/wall-e-esp8266-automower-develop/Wall-E_ESP8266_automower/Wall-E_ESP8266_automower.ino:10: warning: "PrgVer" redefined |
27 | 10 | #define PrgVer 1.05 // Responsive web interface |
28 | | |
29 | /Users/Pieter/Downloads/wall-e-esp8266-automower-develop/Wall-E_ESP8266_automower/Wall-E_ESP8266_automower.ino:9: note: this is the location of the previous definition |
30 | 9 | #define PrgVer 1.04 // Compilable version |
31 | | |
32 | /Users/Pieter/Downloads/wall-e-esp8266-automower-develop/Wall-E_ESP8266_automower/Wall-E_ESP8266_automower.ino:11: warning: "PrgVer" redefined |
33 | 11 | #define PrgVer 1.06 // Added timer, working days, next start |
34 | | |
35 | /Users/Pieter/Downloads/wall-e-esp8266-automower-develop/Wall-E_ESP8266_automower/Wall-E_ESP8266_automower.ino:10: note: this is the location of the previous definition |
36 | 10 | #define PrgVer 1.05 // Responsive web interface |
37 | | |
38 | /Users/Pieter/Downloads/wall-e-esp8266-automower-develop/Wall-E_ESP8266_automower/Wall-E_ESP8266_automower.ino:12: warning: "PrgVer" redefined |
39 | 12 | #define PrgVer 1.07 // Validate command response (CRC8) and use timer |
40 | | |
41 | /Users/Pieter/Downloads/wall-e-esp8266-automower-develop/Wall-E_ESP8266_automower/Wall-E_ESP8266_automower.ino:11: note: this is the location of the previous definition |
42 | 11 | #define PrgVer 1.06 // Added timer, working days, next start |
43 | | |
44 | /Users/Pieter/Downloads/wall-e-esp8266-automower-develop/Wall-E_ESP8266_automower/Wall-E_ESP8266_automower.ino:13: warning: "PrgVer" redefined |
45 | 13 | #define PrgVer 1.08 // Logging |
46 | | |
47 | /Users/Pieter/Downloads/wall-e-esp8266-automower-develop/Wall-E_ESP8266_automower/Wall-E_ESP8266_automower.ino:12: note: this is the location of the previous definition |
48 | 12 | #define PrgVer 1.07 // Validate command response (CRC8) and use timer |
49 | | |
50 | /Users/Pieter/Downloads/wall-e-esp8266-automower-develop/Wall-E_ESP8266_automower/Wall-E_ESP8266_automower.ino:14: warning: "PrgVer" redefined |
51 | 14 | #define PrgVer 1.09 // Modifiable timer settings |
52 | | |
53 | /Users/Pieter/Downloads/wall-e-esp8266-automower-develop/Wall-E_ESP8266_automower/Wall-E_ESP8266_automower.ino:13: note: this is the location of the previous definition |
54 | 13 | #define PrgVer 1.08 // Logging |
55 | | |
56 | /Users/Pieter/Downloads/wall-e-esp8266-automower-develop/Wall-E_ESP8266_automower/Wall-E_ESP8266_automower.ino:15: warning: "PrgVer" redefined |
57 | 15 | #define PrgVer 1.10 // WebUpdater |
58 | | |
59 | /Users/Pieter/Downloads/wall-e-esp8266-automower-develop/Wall-E_ESP8266_automower/Wall-E_ESP8266_automower.ino:14: note: this is the location of the previous definition |
60 | 14 | #define PrgVer 1.09 // Modifiable timer settings |
61 | | |
62 | /Users/Pieter/Downloads/wall-e-esp8266-automower-develop/Wall-E_ESP8266_automower/Wall-E_ESP8266_automower.ino:16: warning: "PrgVer" redefined |
63 | 16 | #define PrgVer 1.11 // Revise battery status |
64 | | |
65 | /Users/Pieter/Downloads/wall-e-esp8266-automower-develop/Wall-E_ESP8266_automower/Wall-E_ESP8266_automower.ino:15: note: this is the location of the previous definition |
66 | 15 | #define PrgVer 1.10 // WebUpdater |
67 | | |
68 | /Users/Pieter/Downloads/wall-e-esp8266-automower-develop/Wall-E_ESP8266_automower/Wall-E_ESP8266_automower.ino:17: warning: "PrgVer" redefined |
69 | 17 | #define PrgVer 1.12 // Revise timer status |
70 | | |
71 | /Users/Pieter/Downloads/wall-e-esp8266-automower-develop/Wall-E_ESP8266_automower/Wall-E_ESP8266_automower.ino:16: note: this is the location of the previous definition |
72 | 16 | #define PrgVer 1.11 // Revise battery status |
73 | | |
74 | /Users/Pieter/Downloads/wall-e-esp8266-automower-develop/Wall-E_ESP8266_automower/Wall-E_ESP8266_automower.ino:18: warning: "PrgVer" redefined |
75 | 18 | #define PrgVer 1.13 // Use DHCP instead of static ip |
76 | | |
77 | /Users/Pieter/Downloads/wall-e-esp8266-automower-develop/Wall-E_ESP8266_automower/Wall-E_ESP8266_automower.ino:17: note: this is the location of the previous definition |
78 | 17 | #define PrgVer 1.12 // Revise timer status |
79 | | |
80 | /Users/Pieter/Downloads/wall-e-esp8266-automower-develop/Wall-E_ESP8266_automower/Wall-E_ESP8266_automower.ino:19: warning: "PrgVer" redefined |
81 | 19 | #define PrgVer 1.14 // Insert refresh button, reactivate and modify timer |
82 | | |
83 | /Users/Pieter/Downloads/wall-e-esp8266-automower-develop/Wall-E_ESP8266_automower/Wall-E_ESP8266_automower.ino:18: note: this is the location of the previous definition |
84 | 18 | #define PrgVer 1.13 // Use DHCP instead of static ip |
85 | | |
86 | /Users/Pieter/Downloads/wall-e-esp8266-automower-develop/Wall-E_ESP8266_automower/Wall-E_ESP8266_automower.ino:20: warning: "PrgVer" redefined |
87 | 20 | #define PrgVer 1.15 // add OTA, add MQTT, add wifiMulti, add links on index page |
88 | | |
89 | /Users/Pieter/Downloads/wall-e-esp8266-automower-develop/Wall-E_ESP8266_automower/Wall-E_ESP8266_automower.ino:19: note: this is the location of the previous definition |
90 | 19 | #define PrgVer 1.14 // Insert refresh button, reactivate and modify timer |
91 | | |
92 | /Users/Pieter/Downloads/wall-e-esp8266-automower-develop/Wall-E_ESP8266_automower/Wall-E_ESP8266_automower.ino:21: warning: "PrgVer" redefined |
93 | 21 | #define PrgVer 1.16 // Add mowerName, mowerType, new error codes for Gardena R70li, AutoCrc option, workdays2, modify timer from website, automation extension, lastLogEntry in JSON |
94 | | |
95 | /Users/Pieter/Downloads/wall-e-esp8266-automower-develop/Wall-E_ESP8266_automower/Wall-E_ESP8266_automower.ino:20: note: this is the location of the previous definition |
96 | 20 | #define PrgVer 1.15 // add OTA, add MQTT, add wifiMulti, add links on index page |
97 | | |
98 | /Users/Pieter/Downloads/wall-e-esp8266-automower-develop/Wall-E_ESP8266_automower/Wall-E_ESP8266_automower.ino:22: warning: "PrgVer" redefined |
99 | 22 | #define PrgVer 1.17 // Optimize automation program (remove workingdays of Timer2 at end of Timer2), update all values at start, add links of commands to webpage |
100 | | |
101 | /Users/Pieter/Downloads/wall-e-esp8266-automower-develop/Wall-E_ESP8266_automower/Wall-E_ESP8266_automower.ino:21: note: this is the location of the previous definition |
102 | 21 | #define PrgVer 1.16 // Add mowerName, mowerType, new error codes for Gardena R70li, AutoCrc option, workdays2, modify timer from website, automation extension, lastLogEntry in JSON |
103 | | |
104 | /Users/Pieter/Downloads/wall-e-esp8266-automower-develop/Wall-E_ESP8266_automower/Wall-E_ESP8266_automower.ino:23: warning: "PrgVer" redefined |
105 | 23 | #define PrgVer 1.18 // Fix bug (only remove workingdays of Timer2 at end of Timer2 when mower is charging) (Thanks to Rob R.) |
106 | | |
107 | /Users/Pieter/Downloads/wall-e-esp8266-automower-develop/Wall-E_ESP8266_automower/Wall-E_ESP8266_automower.ino:22: note: this is the location of the previous definition |
108 | 22 | #define PrgVer 1.17 // Optimize automation program (remove workingdays of Timer2 at end of Timer2), update all values at start, add links of commands to webpage |
109 | | |
110 | /Users/Pieter/Downloads/wall-e-esp8266-automower-develop/Wall-E_ESP8266_automower/Wall-E_ESP8266_automower.ino:24: warning: "PrgVer" redefined |
111 | 24 | #define PrgVer 1.19 // Fix bug (temperature >25,5C not shown), added battery charge in percent, added workinghours (Thanks to jackmaniels) |
112 | | |
113 | /Users/Pieter/Downloads/wall-e-esp8266-automower-develop/Wall-E_ESP8266_automower/Wall-E_ESP8266_automower.ino:23: note: this is the location of the previous definition |
114 | 23 | #define PrgVer 1.18 // Fix bug (only remove workingdays of Timer2 at end of Timer2 when mower is charging) (Thanks to Rob R.) |
115 | | |
116 | /Users/Pieter/Downloads/wall-e-esp8266-automower-develop/Wall-E_ESP8266_automower/Wall-E_ESP8266_automower.ino:25: warning: "PrgVer" redefined |
117 | 25 | #define PrgVer 1.20 // Included WLAN manager, Relay reset switch on D1 (Wemos relay board) and reset procedure for the esp board (RCOOLEN) |
118 | | |
119 | /Users/Pieter/Downloads/wall-e-esp8266-automower-develop/Wall-E_ESP8266_automower/Wall-E_ESP8266_automower.ino:24: note: this is the location of the previous definition |
120 | 24 | #define PrgVer 1.19 // Fix bug (temperature >25,5C not shown), added battery charge in percent, added workinghours (Thanks to jackmaniels) |
121 | | |
122 | /Users/Pieter/Downloads/wall-e-esp8266-automower-develop/Wall-E_ESP8266_automower/Wall-E_ESP8266_automower.ino: In function 'void loop()': |
123 | /Users/Pieter/Downloads/wall-e-esp8266-automower-develop/Wall-E_ESP8266_automower/Wall-E_ESP8266_automower.ino:284:44: warning: comparison of integer expressions of different signedness: 'long unsigned int' and 'int' [-Wsign-compare] |
124 | 284 | if (currentMillis - previousMillisStatus >= updateIntervalStatus * 1000) |
125 | | ~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~^~~~~~~~~~~~~~~~~~~~~~~~~~~~~~ |
126 | /Users/Pieter/Downloads/wall-e-esp8266-automower-develop/Wall-E_ESP8266_automower/Wall-E_ESP8266_automower.ino:294:43: warning: comparison of integer expressions of different signedness: 'long unsigned int' and 'int' [-Wsign-compare] |
127 | 294 | if (currentMillis - previousMillisTimer >= updateIntervalTimer * 1000) |
128 | | ~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~^~~~~~~~~~~~~~~~~~~~~~~~~~~~~ |
129 | /Users/Pieter/Downloads/wall-e-esp8266-automower-develop/Wall-E_ESP8266_automower/Wall-E_ESP8266_automower.ino: In function 'String GetByteFromHexString(String, int)': |
130 | /Users/Pieter/Downloads/wall-e-esp8266-automower-develop/Wall-E_ESP8266_automower/Wall-E_ESP8266_automower.ino:1076:34: warning: comparison of integer expressions of different signedness: 'int' and 'unsigned int' [-Wsign-compare] |
131 | 1076 | if (index < 0 || index * 3 + 2 > asciiHex.length()) |
132 | | ~~~~~~~~~~~~~~^~~~~~~~~~~~~~~~~~~ |
133 | /Users/Pieter/Downloads/wall-e-esp8266-automower-develop/Wall-E_ESP8266_automower/Wall-E_ESP8266_automower.ino: In function 'bool WaitforSerial(unsigned int, unsigned int)': |
134 | /Users/Pieter/Downloads/wall-e-esp8266-automower-develop/Wall-E_ESP8266_automower/Wall-E_ESP8266_automower.ino:1153:28: warning: comparison of integer expressions of different signedness: 'int' and 'unsigned int' [-Wsign-compare] |
135 | 1153 | if (Serial.available() >= bytes) |
136 | | ~~~~~~~~~~~~~~~~~~~^~~~~~~~ |
137 | /Users/Pieter/Downloads/wall-e-esp8266-automower-develop/Wall-E_ESP8266_automower/Wall-E_ESP8266_automower.ino: In function 'int hex2int(char*, unsigned int)': |
138 | /Users/Pieter/Downloads/wall-e-esp8266-automower-develop/Wall-E_ESP8266_automower/Wall-E_ESP8266_automower.ino:1190:21: warning: comparison of integer expressions of different signedness: 'int' and 'unsigned int' [-Wsign-compare] |
139 | 1190 | for (int i = 0; i < len; i++) |
140 | | ~~^~~~~ |
141 | /Users/Pieter/Downloads/wall-e-esp8266-automower-develop/Wall-E_ESP8266_automower/Wall-E_ESP8266_automower.ino: In function 'bool IsValid(String)': |
142 | /Users/Pieter/Downloads/wall-e-esp8266-automower-develop/Wall-E_ESP8266_automower/Wall-E_ESP8266_automower.ino:1214:8: warning: unused variable 'result' [-Wunused-variable] |
143 | 1214 | bool result = true; |
144 | | ^~~~~~ |
145 | /Users/Pieter/Downloads/wall-e-esp8266-automower-develop/Wall-E_ESP8266_automower/Wall-E_ESP8266_automower.ino: In function 'uint8_t CalculateCrc(String)': |
146 | /Users/Pieter/Downloads/wall-e-esp8266-automower-develop/Wall-E_ESP8266_automower/Wall-E_ESP8266_automower.ino:1234:21: warning: comparison of integer expressions of different signedness: 'int' and 'unsigned int' [-Wsign-compare] |
147 | 1234 | for (int i = 0; i < sizeof(data); i++) |
148 | | ~~^~~~~~~~~~~~~~ |
149 | /Users/Pieter/Downloads/wall-e-esp8266-automower-develop/Wall-E_ESP8266_automower/Wall-E_ESP8266_automower.ino: In function 'String weekDay2Hex(int)': |
150 | Wall-E_ESP8266_automower:586:1: error: control reaches end of non-void function [-Werror=return-type] |
151 | 586 | } |
152 | | ^ |
153 | /Users/Pieter/Downloads/wall-e-esp8266-automower-develop/Wall-E_ESP8266_automower/Wall-E_ESP8266_automower.ino: In function 'uint8_t SingleHex2Dec(char)': |
154 | Wall-E_ESP8266_automower:1309:1: error: control reaches end of non-void function [-Werror=return-type] |
155 | 1309 | } |
156 | | ^ |
157 | /Users/Pieter/Downloads/wall-e-esp8266-automower-develop/Wall-E_ESP8266_automower/Wall-E_ESP8266_automower.ino: In function 'String GetTestResponse(String)': |
158 | Wall-E_ESP8266_automower:1800:1: error: control reaches end of non-void function [-Werror=return-type] |
159 | 1800 | } |
160 | | ^ |
161 | cc1plus: some warnings being treated as errors |
162 | Using library ESP8266WiFi at version 1.0 in folder: /Users/Pieter/Library/Arduino15/packages/esp8266/hardware/esp8266/3.0.2/libraries/ESP8266WiFi |
163 | Using library WiFiManager at version 2.0.12-beta in folder: /Users/Pieter/Documents/Arduino/libraries/WiFiManager |
164 | Using library ESP8266WebServer at version 1.0 in folder: /Users/Pieter/Library/Arduino15/packages/esp8266/hardware/esp8266/3.0.2/libraries/ESP8266WebServer |
165 | Using library DNSServer at version 1.1.1 in folder: /Users/Pieter/Library/Arduino15/packages/esp8266/hardware/esp8266/3.0.2/libraries/DNSServer |
166 | Using library ESP8266mDNS at version 1.2 in folder: /Users/Pieter/Library/Arduino15/packages/esp8266/hardware/esp8266/3.0.2/libraries/ESP8266mDNS |
167 | Using library ESP8266HTTPUpdateServer at version 1.0 in folder: /Users/Pieter/Library/Arduino15/packages/esp8266/hardware/esp8266/3.0.2/libraries/ESP8266HTTPUpdateServer |
168 | Using library ArduinoOTA at version 1.0 in folder: /Users/Pieter/Library/Arduino15/packages/esp8266/hardware/esp8266/3.0.2/libraries/ArduinoOTA |
169 | exit status 1 |
170 | control reaches end of non-void function [-Werror=return-type] |
Please help, Danke schon.
Kim schrieb: > Finally i figured it out. > On the wemos d1 mini I had to remove the resistor at RX pin between esp > and the cp2104. Then I was able to get some results back. Drawback is > that I cannot flash it using the USB, before I add the resistor again. I > added some wires so its possbible without soldering > I do have the same problem. Can you please send a picture of exactly what you did? Which resistor where on de Wemos D1 mini I have to remove? And how to add the wires? Thanks in advance!
I have tried the following to be sure: Pin 1, 2, 4 & 5 connected one-by-one to the TX of serial UART-USB while the Gardena R40Li (2012) was operational/running on the lawn. setting 115200 / 8-N-1 3 and 8 are Ground 6 is 5 V 7 is 18 V None of them gave any result in my serial monitor. When I connect Rx and Tx of my serial UART-USB I do see what I type. So that must be oke. I'm out of idea's of how to connect my Gardena R40Li (2012) to Wemos D1. Any help would be appreciated. Thanks! ------------------------------------------------------------------------ - Ich habe folgendes versucht, um sicher zu sein: Pin 1, 2, 4 & 5 wurden nacheinander mit dem TX des seriellen UART-USB verbunden, während der Gardena R40Li (2012) auf dem Rasen in Betrieb war. Einstellung 115200 / 8-N-1 3 und 8 sind Erde 6 ist 5 V 7 ist 18 V Keiner von ihnen gab irgendein Ergebnis in meinem seriellen Monitor. Wenn ich Rx und Tx von meinem seriellen UART-USB anschließe, sehe ich, was ich tippe. Das muss also in Ordnung sein. Ich habe keine Ahnung, wie ich meinen Gardena R40Li (2012) mit Wemos D1 verbinden kann. Jede Hilfe würde geschätzt werden. Danke!
Hello everyone, has anyone ever tried to use the UART communication via ESP using ESPHome and getting the Automower control into Home Assistant? I would like to try to do so, but I'm not an expert. If anyone already tried and managed to do it, I would really appreciate any hint or help! Thank you!
Hello, did you manage to get it working with UART?
Oliver schrieb: > Moin zusammen, > > Ich habe die Automover Version 1.20 auf den Esp32 portiert. Dazu noch > den Mäher Status in Zahlen zugeordnet für eine bessere Auswertung z.b. > in iobroker. > > Beim Wakeup habe ich noch Pin senden eingefügt nun wacht der Mäher > richtig auf. > > Aber die Start funktion reagiert nicht so wie es soll. > Da probier werde ich mal Markus Lösung probieren. > > Seriell an der MMi Schnittstelle bekomme ich immer einen Fehler im > Display. Gibt es eine Steckerbelegung vom MMi port? > > Gruß Oliver Hallo, Ist es möglich den portierten Code für den ESP32 zu erhalten?
Hallo! Vielen Dank für diesen Topic. Ich bin sehr daran interessiert, meinen Automower 315 (Produktnummer 9676730-17) mit dem ESP8266 zu verbinden. Nachdem ich es ausprobiert habe, scheine ich jedoch verloren zu sein, ob ich alles richtig mache und ob Aux1 mit den Pins 1 und 2 für RX/TX korrekt ist. Ich habe den Code der Version 1.20 genommen und ihn so modifiziert, dass nur der MQTT-Teil für meine Tests erhalten bleibt. Mit DebugOn habe ich sichergestellt, dass der Code (zufällige) Dinge an meinen MQTT-Server zurückgibt. Das funktioniert wahrscheinlich gut. Was nicht funktioniert, ist das Empfangen von Daten von meinem Automower 315 :) Kann jemand bestätigen, dass der PINOUT für AUX1 im Automower 315 der gleiche ist wie im PDF, d. h. dass die Ports 1 und 2 (die beiden linken Ports, am nächsten zum Kunststoff-"Haken") RX bzw. TX sind? Wenn ich mich entweder an 3,3V (5. Pin) oder 5V (6. Pin) anschließe, läuft mein ESP8266 mit meiner modifizierten Version 1.20 und meldet schön den RSSI-Wert zurück. Aber vom Automower erhalte ich nichts, nur den Text "No Response". Natürlich habe ich versucht, die RX/TX-Kabel am ESP8266 zu vertauschen, mich vergewissert, dass der Automower funktioniert (indem ich ihn zusammengebaut und auf dem Rasen arbeiten lasse), überprüft, ob meine Lötung des Micro-Match-Steckers an die Jumper-Kabel in Ordnung ist, aber leider ohne Erfolg. Daher denke ich, dass ich entweder RX/TX vertausche, die Baudrate falsch eingestellt habe oder etwas in dieser Richtung nicht stimmt. Irgendwelche anderen Gedanken? Viele Grüße, Tarmo aus Estland
Tarmo schrieb: > Hallo! > > Vielen Dank für diesen Topic. Ich bin sehr daran interessiert, meinen > Automower 315 (Produktnummer 9676730-17) mit dem ESP8266 zu verbinden. > Nachdem ich es ausprobiert habe, scheine ich jedoch verloren zu sein, ob > ich alles richtig mache und ob Aux1 mit den Pins 1 und 2 für RX/TX > korrekt ist. > > Ich habe den Code der Version 1.20 genommen und ihn so modifiziert, dass > nur der MQTT-Teil für meine Tests erhalten bleibt. Mit DebugOn habe ich > sichergestellt, dass der Code (zufällige) Dinge an meinen MQTT-Server > zurückgibt. Das funktioniert wahrscheinlich gut. > Was nicht funktioniert, ist das Empfangen von Daten von meinem Automower > 315 :) > > Kann jemand bestätigen, dass der PINOUT für AUX1 im Automower 315 der > gleiche ist wie im PDF, d. h. dass die Ports 1 und 2 (die beiden linken > Ports, am nächsten zum Kunststoff-"Haken") RX bzw. TX sind? > > Wenn ich mich entweder an 3,3V (5. Pin) oder 5V (6. Pin) anschließe, > läuft mein ESP8266 mit meiner modifizierten Version 1.20 und meldet > schön den RSSI-Wert zurück. Aber vom Automower erhalte ich nichts, nur > den Text "No Response". > Natürlich habe ich versucht, die RX/TX-Kabel am ESP8266 zu vertauschen, > mich vergewissert, dass der Automower funktioniert (indem ich ihn > zusammengebaut und auf dem Rasen arbeiten lasse), überprüft, ob meine > Lötung des Micro-Match-Steckers an die Jumper-Kabel in Ordnung ist, aber > leider ohne Erfolg. > Daher denke ich, dass ich entweder RX/TX vertausche, die Baudrate falsch > eingestellt habe oder etwas in dieser Richtung nicht stimmt. > Irgendwelche anderen Gedanken? > > Viele Grüße, > Tarmo aus Estland Das ist genau mein Problem mit meinem 2012 Gardena R40Li. Ich hoffe, Sie finden eine Lösung. Ich habe nach zwei Jahren der Suche keine Lösung gefunden ... Viele Grüsse, Pieter aus die Niederlande
Pieter G. schrieb: > Hello, did you manage to get it working with UART? Unfortunately I had no time to try again... Maybe I will give this another try during the summer. If anyone managed to get it working, I would really appreciate a help.
Hi all! Best if I write in English, in case interested I can translate it to German too. I totally understand this being a German forum, yet with those projects there is not much other sources and sufficient amount of geekiness around to choose the forums :) So I have first partial success with my Automower 315. I can SEND commands and AM reacts. But not getting anything back status-battery etc wise. I have tried STOP and START and it works, so apparently I have the BAUD rate and pins correct. I can confirm that esp8266 side TX connects to pin2 (RX) AM side. As well I confirm the following table: UART_RX AM side pin2 GND AM side pin3 3.3 V AM side pin5 5 V AM side pin6 18 V AM side pin7 The first pin on Micromatch ribbon cable is red, so the second wire (Automower RX) goes to TX on ESP8266. I can not yet confirm AM side pin1/TX as I'm not getting anything back from it :) I'm working only on MQTT and publishing the debug output and where I'm stuck is precisely the "Timeout1" part for anything at all as Christian M. and Kim did have. I have changed the Wall-E code so that I can change remotely with MQTT the Wall-E Baud rate, Serial Wait and other parameters to test if that helps (eg 9600 baud, 2 sec serial wait etc). The above SEND success comes with original 115200 baud and default 1000ms for serial wait time. I mocked as well with another esp8266 to be on the sending side to make sure the code is able to display anything at all, hooked two esp8266's up (one the modified Wall-E and other mock sender) and powered them from battery to avoid any USB serial mess) and for the sender used the Wall-E GetTestResponse() function. That did confirm that my modified Wall-E is able to have serial RX. Automower 315 has 3 AUX ports: 2 on main board and 1 on screen board. I must yet make sure the AUX on screen board was properly tested. As I understand, there is no reason to believe 315 has TX somewhere else? My next steps: a) visit shop and buy D1 to be on the same page as you guys. b) and, as I managed to shred with my automower running tests the charging cable dangling from underneath the outer shell I need new connector too there ;) c) make further tests to screen PCB AUX port. Regards, Tarmo
Hello Tarmo, This sounds promising, hope you also can find the TX. Thanks! Tebogo
Hello! I need help with the gardena r40li pin code Can you help? ZUVG JGVN JSTS 120502913
Hallo! Ich brauche Hilfe, lässt sich der PIN-Code eines R40Li-Rasenmähers irgendwie entschlüsseln? ZUVG JGVN JSTS 120502913
Das kann nur Gardena. Hier ist der Link zu benötigten PDF. Personalausweis muss mitgeschickt werden. https://hqvcdn3.azureedge.net/qs_ver=20190523T084022&hcsh=ED8ABDC62D040165B03D3AB5E1103CBC/_$$_/media/localcontent/de/gardena/downloads/2019/maehroboter%20pincode.pdf
:
Bearbeitet durch User
Ich habe den Rdobot bei eBay mit der Fehlermeldung gekauft, dass er sich nicht einschalten lässt. Das Problem lag an der Batterie. Ich habe es ausgetauscht, aber der Vorbesitzer kennt die PIN auch nicht. Ich versuche herauszufinden, was es sagt, wenn die Taste 9 des Sicherheitsschlüssels und seiner PIN-Verbindung gedrückt wird. Dazu benötige ich den Sicherheitscode und die PIN einer anderen Person, um eine Verbindung zwischen den beiden Schlüsseln herzustellen. kannst du mir dabei helfen?
Hello Tarmo / Gutentag Tarmo, Any progress with the TX? Sind Sie Weiter gekomen mit die TX? Thank you! / Bitte schon! Greetings/Gruss Tebogo
Hi, gleiches Problem bei mir. Habe die Anweisungen befolgt und verwende einen Wemos D1 mini. Andere Kombinationen der Belegung habe ich auch probiert, leider kein Glück gehabt. Keine SerialMessages oder irgendendeine Aktion am Mäher zu erkennen. Ist hier irgendjemand der mit der 1.20 einen HQ 315 laufen hat ? EN same problem here. Followed the instructions and used a Wemos D1 mini as well checked other combinations. No luck to see any SerialMessages nor any action to the mower. Anyone here running a HQ 315 sucessfullly with version 1.20 ? danke & regards sm0k0
Hi, ich habe bei meinem Gardena R40Li die Lösung mit der WALL-E Software und der Wemos D1 Mini Pro (ESP8266) umgesetzt. Die funktioniert auch soweit. Zuerst habe ich die Karte mit 5V (Pin 6) versorgt, die 5V werden aber abgeschaltet wenn der Robbi nicht lädt und nicht fährt. Deshalb habe ich einen DC/DC Step-Down-Wandler besorgt um die Wemos-Karte mit der Batteriespannung 18V (Pin 7) zu versorgen. DC/DC-Wandler (Pollin-Bestell-Nr. 352823): GAPTEC DC-DC-Wandler, SIP3 micro size, 6,8-28Vin, 5Vout, 500mA Jetzt habe ich aber das Problem dass der Wandler anscheinend so stark stört, dass zum Einen die WLAN-Verbindung relativ schlecht ist und zum Anderen der Robbi ständig aufwacht. Sieht man am Display -> geht aus -> wieder an -> wieder aus... Das geht ständig so. Ich habe Puffer-Cs vor und hinter den Wandler bestückt (jeweils 22uF Tantal), aber das hilft gar nichts. Wenn man mit dem Oszi misst sieht man schön die Schaltfrequenz des Wandlers auf der Leitung. Kann jemand einen DC/DC-Wandler empfehlen der nicht so stört und besser geeignet wäre? Es gibt doch sicher Kombinationen mit DC/DC-Wandler und ESP8266 (bzw. der Wemos D1 Mini Pro) die gut funktionieren. Hat da jemand einen Vorschlag oder schon was umgesetzt? Danke schon mal vorab.
Ich würd mal bei Amaz... nach DC / DC Buck Converter 3,2-46V suchen, a gibt es zig die relativ zuverlässig laufen. Gruß Sm0k0
in "Wall-E_ESP8266_automower.ino V1.20" by RCOOLEN findet man folgende Info "Triggers a wakeup pulse for the mower via the relay board attached to the reset contact on the main board." Welcher "reset contact" ist damit auf dem Mainboard gemeint? Wäre das das fehlende Puzzleteil zum Aufwecken des Rodoters wenn er im Standby ist? Ich habe mir zudem das Main Board meines R70Li angeschaut, dort gibt es ganz rechts oben noch 2 Pins mit der Bezeichnugn "STOP". Könnte dieser evtl. als WakeUp genutzt werden bzw ist das evtl der PIN für den die Anpassung in der V1.20 von RCOOLEN gemacht wurde? mfg Rene
Heiko Z. schrieb: > Ich würd mal bei Amaz... nach DC / DC Buck Converter 3,2-46V suchen, a > gibt es zig die relativ zuverlässig laufen. Hi, habe mir jetzt einen einstellbaren DC/DC Buck Converter eingebaut, jetzt läuft das störungsfrei. Beim Testen habe ich festgestellt dass sich bei zu schnellem und/oder zu häufigem refreshen der WALL-E Web-Oberfläche sich die Web-Oberfläche aufhängt. Aber damit kann ich leben. Ein Problem bleibt noch: man kann den Mähroboter per WAKEUP wecken (oberen STOP-Pin nach GND ziehen). Danach muß man den PIN-Code eingeben (geht mit send-Befehl). Aber der START-Befehl funktioniert danach nicht. Dazu habe ich auch einen Post gelesen dass man in diesem Fall den Robbi nur über den Taster am Display starten kann. Gibt es dafür eine (einfache) Lösung, um das doch per WLAN (D1 Mini Pro) machen zu können? Rene schrieb: > "Triggers a wakeup pulse for the mower via the relay board attached to > the reset contact on the main board." > > Welcher "reset contact" ist damit auf dem Mainboard gemeint? Wäre das > das fehlende Puzzleteil zum Aufwecken des Rodoters wenn er im Standby > ist? > > Ich habe mir zudem das Main Board meines R70Li angeschaut, dort gibt es > ganz rechts oben noch 2 Pins mit der Bezeichnugn "STOP". Könnte dieser > evtl. als WakeUp genutzt werden bzw ist das evtl der PIN für den die > Anpassung in der V1.20 von RCOOLEN gemacht wurde? > Hi Rene, grundsätzlich ja. Wenn man den oberen der beiden STOP-Pins nach GND zieht dann wacht der Robbi auf. Das wird in WALL-E mit dem D1-Pin umgesetzt und braucht extern noch eine kleine Beschaltung (Relais oder besser Transistor). PIN-Code senden geht auch (Befehl siehe in "Robomower_V0.8.pdf"), ist in WALL-E aber nicht umgesetzt. Das Problem ist aber wie oben beschrieben dass man den Robbi dann nur noch über die START-Taste am Mähroboter starten kann. Gruß, Klaus
@Klaus, vielen Dank für die Info. Hat schon jemand einen Datenstrung gefunden der ausgelöst wird wenn der Roboter am Begrenzungsdraht stop und umdreht? Mit freundlichen Grüßen Rene
Bitte melde dich an um einen Beitrag zu schreiben. Anmeldung ist kostenlos und dauert nur eine Minute.
Bestehender Account
Schon ein Account bei Google/GoogleMail? Keine Anmeldung erforderlich!
Mit Google-Account einloggen
Mit Google-Account einloggen
Noch kein Account? Hier anmelden.