Hallo, ich möchte eine Motorregelung mit MOSFET (zur Stromregelung), LEM Wandler (misst den aktuellen Strom) und OPV realisieren. Der OPV bekommt das Ausgangssignal vom LEM und als "referenz" ein gesiebtes PWM signal, dass um 2,5V pegelt (referenz vom LEM liegt bei 2,5V). Das Problem: Ich wollte die MOSFETS mit Treibern (MAX620) ansteuern, die am Eingang ein TTL/CMOS Signal brauchen... Das gibt mir der OPV doch aber nicht direkt. Wie kann ich das machen? Die Idee war: Erreicht der Strom eine Obergrenze, soll der OPV Ausgang 0V sein (z.B. LEM Ausgang auf OPV-Plus-Eingang und gesiebtes PWM auf OPV-Minus, und dann das PWM Signal bei z.B. 4V einstellen) Wird jetzt ein bestimmter Wert unterschritten (z.B. Obergrenze minus 0,5V) soll der OPV-Ausgang 5V haben. Was noch hinzu kommt ist, dass auch ein Rückwärtslauf vorhanden sein soll... Sprich das ganze muss auch mit einer Untergrenze gehen. (Aber das sollte keine Probleme machen -> PWM auf 1V eingestellt -> der LEM Ausgang nähert sich 1V und der OPV schaltet ab, usw.) Gibt es dazu evtl. Vorschläge? Muss ich nach dem OPV noch eine Transistorstufe schalten? (Würde ja fast passen. Die meisten NPNs schalten ja bei 0,7V ein an der BE Diode ein) Aber geht das nicht auch einfacher? Was ich ausschließen kann ist das LEM Signal direkt auf den steuernden µC zu geben und den per PWM die MOSFETs regeln zu lassen. Das funktioniert nämlich leider nicht, da mein µC mit 8Mhz zu langsam ist. Danke schonmal. MfG, Martin.
Nachtrag: Ist vielleicht ein Komparator angebrachter? Welche OPVs/Komparatoren würden sich eignen?
Ist nicht soo einfach: im PWM Betrieb STEIGT der Motorstrom bei sinkender Drehzahl bis zu einem bestimmten Punkt. Speziell immer dann, wenn man "vom GAS geht". Die Stromregelung/Überwachung müsste also mit einem Portpin deaktiviert werden, wenn der Dutycycle sinkt (alter OCx > neuer OCx) Aber ich glaube, du verwendest garkeinen Controller, oder? Kennst Du meinen "GoKart" Thread?
doch doch ich nehm nen controller... im moment macht der controller die auswertung des lem signals (per AD) und schaltet entsprechend die MOSFETS (da nehm ich gar kein richtiges PWM) funktioniert so: erreicht der gemessene wert eine obergrenze bzw. eine untergrenze wird abgeschaltet. fällt dann der wert (bzw. steigt) um einen bestimmten wert (eben die 0,5V) wird wieder eingeschaltet. ich hab die schaltung analysiert und festgestellt, dass der entsprechende portpin immer an ist, aber der strom durch die MOSFETs trotzdem nicht größer als 8-10A wird (das müssen aber bis 20A sein). ich hab darüber mit jemand kurzgeschlossen, der meinte da ist wahrscheinlich der µC (@8 MHz) zu langsam... und hat vorgeschlagen das mit nem OPV zu machen. der µC soll dann nur noch die obergrenzen per PWM definieren (halt abhängig von der "gasstellung"), die steuersignale empfangen und das ganze system überwachen und z.b. bei motorüberhitzung abschalten/runterregeln. dein "gokart" thread kenn ich leider nicht. zitat: "im PWM Betrieb STEIGT der Motorstrom bei sinkender Drehzahl bis zu einem bestimmten Punkt. Speziell immer dann, wenn man "vom GAS geht"." du meinst, dass die OPV regelung den motor weiter antreiben will, obwohl er nicht soll? wenns das ist: das sollte eigentlich nicht passieren, weil ich ja (wie oben gesagt) per µC und gesiebtem PWM die referenz entsprechend dem steuersignal verschiebe... irgenwann kann das ausgangssignal nich mehr groß genug werden, dass der treiber wieder einschaltet (also je näher ich den 2,5V komme) voraussetzung is halt, dass ich den ausgang vom OPV bei z.b. 0,5V soch hoch bekomme, dass er mir ne logische 1 gibt (also über 3V) bis dann, Martin
<<dass der entsprechende portpin immer an ist, aber der strom durch die MOSFETs trotzdem nicht größer als 8-10A wird (das müssen aber bis 20A sein).>> Wenn der Portpin ständig HIGH ist, dann muss auch der Strom des Motors auf seinem Sollwert sein (bei dir 20Ampere). Werden der/die MOSFETS warm? Gokart Thread: hier ein Verweis darauf http://www.mikrocontroller.net/forum/read-1-327044.html#327262 Der Controller, meiner jedenfalls, (Tiny15 im GoKart) hat auch einen Analogcomparator, den man dafür nutzen könnte.Im AC-interrupt einfach die PWM auf NULL setzen.
Angehängte Dateien:
-

fahrtregler.jpg
380 KB
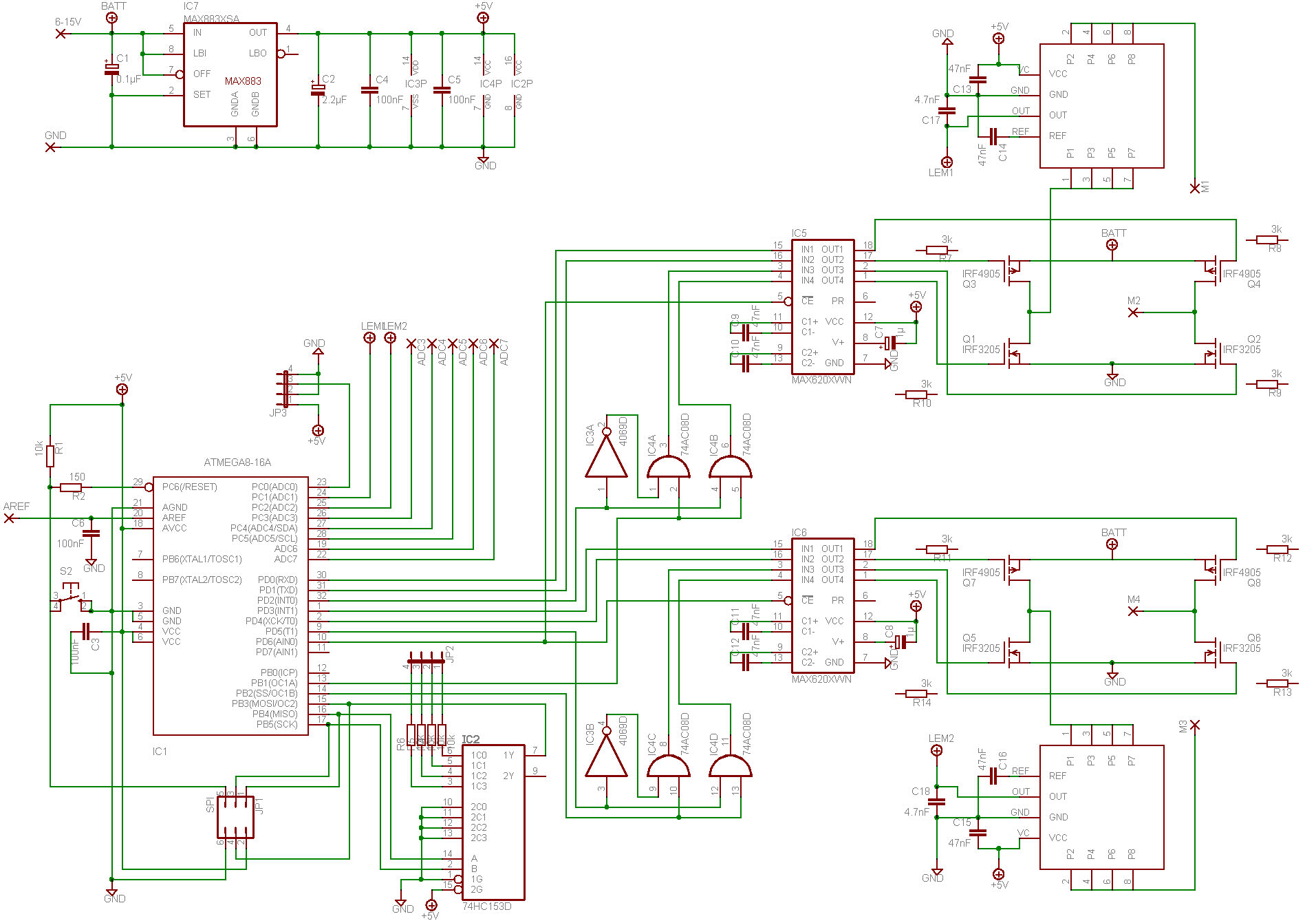
nö die mosfets werden nich annähernd heiß... ich bin da auch sehr verwundert drüber... hier die momentane schaltung (im anhang)... allerdings sind die MAX620 nich da... ich hab ne treiberstufe mit nem andern FET gebaut und der unter MOSFET (IRF3205) wird direkt mit von der logik gestuert... ich weiß das nich so optimal. aber von den spannungen her müsste es passen. ich meld mich denn morgen wieder... bis dann, Martin
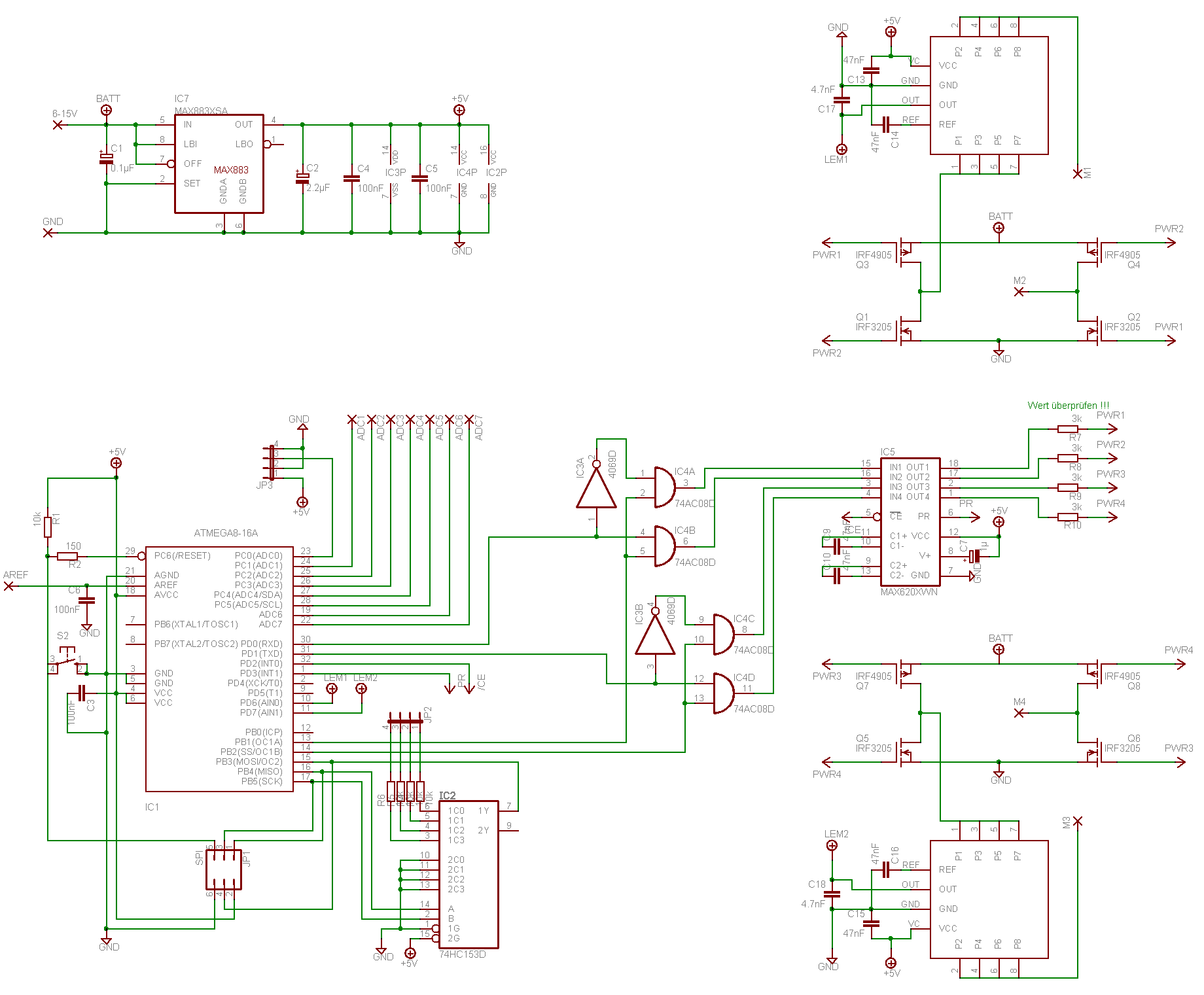
okay... ich habe meine schaltung etwas verändert. ich will mich auf einen MAX620 beschränken, jeder ausgang steuert je zwei diagonal liegende MOSFETS wegen der regelung hab ich mich entschlossen, die AIN eingänge vom mega8 zu nutzen und dann per interrupt die beschaltung zu steuern. verwendet der analog comparator vom mega8 den AREF eingang als referenz oder kann ich die auch intern setzen (wollte jetzt nich mehr nachlesen)? muss ich noch weitere sachen beachten, denke ja... z.b. Freilaufdioden oder widerstände zur begrenzung von schaltspitzen? beim MAX620 ist eine schaltfreq. von 70kHz angegeben... das sollte doch reichen? ansonsten will ich mir noch andere mosfets raussuchen... überhaupt will ich mich auf N-kanal typen beschränken (das geht doch auch?) habe da an IRLZ34NS im D²Pak gedacht deren strom von 30A reicht völlig aus. thx. Martin
aha. der mega8 hat nur einen analog comparator, naja und die AD konverter waren irgendwie zu langsam... wie müsste ich es also machen, damit ich mit zwei komparatoren den treiber steuern kann? habe den MAX9107 mal ins auge gefasst (http://pdfserv.maxim-ic.com/en/ds/MAX9107-MAX9109.pdf), wegen dem ttl ausgang. was ich aus dem datenblatt nicht herausfinden konnte (vielleicht hab ichs auch bloß übersehen), bei welcher differenz an den beiden eingängen er eine 1 am ausgang gibt? kann man sowas irgendwie einstellen? thx. Martin
Nur mal kurz: willst Du die Drehzahl regeln, oder den Motorstrom?
Nun, der Mega8 hat genauso nur einen Analogkomparator, wie er auch nur EINEN Analog-Digital Wandler hat. Die Idee, nur noch einen MAX620 einsetzen zu wollen, ist in sofern ungünstig, da nun beide Zweige(highSide und LOwSide) gleichzeitig schalten, sind beide hochohmig, fliesst der "Freilaufstrom" des Motors über die Parasitären PN-Übergänge sowohl im N, als auch im P-Kanal Fet. Das macht dann bei 20 Ampere Spitze eben auch mal schnell 40Watt Verlust. Man sollte einen der beiden Fets dauerhaft angeschaltet lassen. Ich steuer immer den etsprechenden oberen P-Kanal durch und der entgegengesetzte N-Kanal des einen Kanal bekäme die Signale aus OC0A bzw. aus OC0B, die beiden unteren Fets des zweiten Kanals bekämen die Signale vom PIN OC2A und OC2B. Dann sind die ganzen TTL-Gatter schon mal raus aus deiner Schaltung. Stunden später... man sollte gelegentlich auch mal "Submit" drücken gg
also eigentlich will ich die drehzahl des motors regeln... (steuert die sich nicht über den motorstrom?) es handelt sich dabei um zwei modellboot motoren. das ganze dient also als fahrtregler für ein boot. also bau ich den zweiten MAX620 wieder mit ein. den wegzulassen war nur ne fixe idee, um ein klein wenig platz zu sparen. korrigier mich bitte, aber hat der mega8 nicht nur drei OC ausgänge (OC1A, OC1B, OC2)? aber ohne die TTL Gatter wäre natürlich schön. Dann kann ich das Layout um einiges kompakter gestalten. Wegen dem Komparator: soll ich die quelle dann über einen multiplexer auswählen? denn es sind ja zwei motoren zu steuern - und zwar nicht immer synchron (lenken und so). (hätte ich vielleicht gleich sagen sollen ;) ) die eigentliche regelung wollte ich deswegen lieber komplett aus dem µC rausnehmen und den nur noch als - naja - "supervisor" arbeiten lassen. mein größtes fragezeichen ist wiegesagt bei dem verhalten vom komparator (es soll einer mit TTL ausgang sein)... - bei welcher differenz am eingang passiert eine änderung am ausgang - kann man diesen punkt verschieben thx. Martin.
<<also eigentlich will ich die drehzahl des motors regeln... (steuert die sich nicht über den motorstrom?)>> Die Frage war etwas provokativ, 'tschuldigung - es kam aber genau die Antwort, die erwartet hatte g Das Drehmoment des Motors/derMotoren wird über den Strom geregelt. Hatte ich früher in meinen Motorsteuerungen (Medizintechnik). Dort wurde das Drehmoment geregelt, damit der Motor SOFORT stehen bleibt, wenn der Knochen durch ist (Mahlzeit). OT Wenn andere schon länger in diesem Forum mitlesen, muss der Eindruck entstehen, ich bin 100 Jahre alt. Ich glaubs fast selber nicht, aber ich habe wohl schon einiges erlebt. Wie schrieb jemand: AxelR. weiss immmer was (auch wenn das im damaligen Kontext anders gemeint war). /OT Zurück zum Thema Wenn Du zwei Motore in der Geschwindigkeit regeln möchtest(damit zB. dein Boot geradeaus fährt), kannst Du die Drehzahlen beider Motore über eine einfache Logik im uC verriegeln, einen Motor als Master und den zweiten als Slave, beide Drehzahlen XOR und den zweiten solange nachregeln, bis am XOR keine Impulse mehr entstehen. Das wäre eine Möglichkeit. <<(lenken und so)>> Übersteigt die Differenz der Impulsbreite beider Fernsteuerkanäle einen bestimmten Betrag, hebst Du die VErriegleung eben auf, bis das Lenkmanöver beendet ist. Setzt voraus, dass du auf die Welle der Motoren eine "Messmimik" für die Geschwindigkeit (zB. weißer punkt und Reflexoptokoppler) anbringen kannst. Das soll neuerdings auch rein elekronisch über die BackEMF der Motore gehen. Das habe ich aber noch nicht probiert. Eine zweiter, zeitnaher Ansatz wäre der Einsatz eines Gyroskopes. Das Teil misst winkelbeschleunigungen. Damit fährt dein Boot dann sicher geradeaus, wenns keine Kilometerlangen Strecken sind. Die Drehzahl wenigstens eines Motors wird hier mit dem Ausgangssignal des Gyros verrechnet. http://www.analog.com/en/prod/0%2C2877%2CADXRS401%2C00.html <<korrigier mich bitte, aber hat der mega8 nicht nur drei OC ausgänge (OC1A, OC1B, OC2)?>> Da hast Du sicher Recht! Der Mega8 hat nur diese Optionen. Ich bezog mich fast wie selbstverständlich auf dem Megaachtundachtzig. Mein Fehler ;-) BTW. Nimm doch den Mega88... <<soll ich die quelle dann über einen multiplexer auswählen? >> Wenn mich nicht alles täuscht, lässt sich der Eingang des AnalogKomparators genauso an die Eingänge ADC0-ADC7 legen, wie die Eingänge vom ADC. Müsste ich aber nochmal nachsehen, habe jetzt kein Datenblatt zur Hand (kannst Du ja auch machen). Beim "FLOHBrushless" wirds aber so gemacht - also: es geht(auch beim Mega8), brauchst nicht nachsehen. <<mein größtes fragezeichen...komparator>> ich beziehe mich mal auf den internen Komparator vom AVR. prinzipiell: wenn die Spannung am AIN0 größer wird, als am AIN1, wird ein Interrupt ausgelöst UND/ODER wenn diese Spannung kleiner wird. kann man einstellen. AIN0 ist etweder mit dem entsprechenden HardwarePin verbunden oder mit der internen Referenzspannungsquelle. AIN1 etweder mit dem dafür vorgeshenen PIN oder mit den Eingängen des Analogmultiplexers (ADC0-ADC7) externer Komparator. Es gibt Komparatoren, wo der Umschaltpunkt tatsächlich nicht bereits dann erreicht ist, wenn ein Eingang größer/kleiner wird als der andere. Einige Typen habe hier ein "Fenster" von einigen mV, um Störungen im Umschaltzeitpunkt zu unterdrücken. Stichwort interne Hysterese. Ein Komparator ist wesentlich schneller als ein OPV. TTl Typen sind zB. LTC1540, MAX921 usw. Man kann aber auch herkömmliche Komparatoren (LM393 oderso) verwenden. Dann sollte man aber eine externe Hysterese einbauen. <<- kann man diesen punkt verschieben>> mit ändern der Referenzspannung, lässt sich die Umschaltschwelle einstellen, das Fenster(Hysterese) bei einigen Typen über einen Steuereingang in geringen Grenzen, sonst nur über die externe Beschaltung (mitkopplung). Na wie auch immer - sind hier alles nur theoretische Betrachtungen. - der AVR ist IMMER schneller, als dein Boot, auch der ADC! - Bei der ersten Rückwärtsfahrt geht der AVR in den RESET! - eine Regelung ist meines Erachtens nicht nötig, Steuerung der Drehzahl durch die Fernsteuerungsanlage mit evtl. Gyrokorrektur reicht So, jetzt muss ich aber wieder an die Arbeit AxelR. Vlt. mach mich selbsttändig und produziere zusammen mit ..HanneS.. Fahrregler
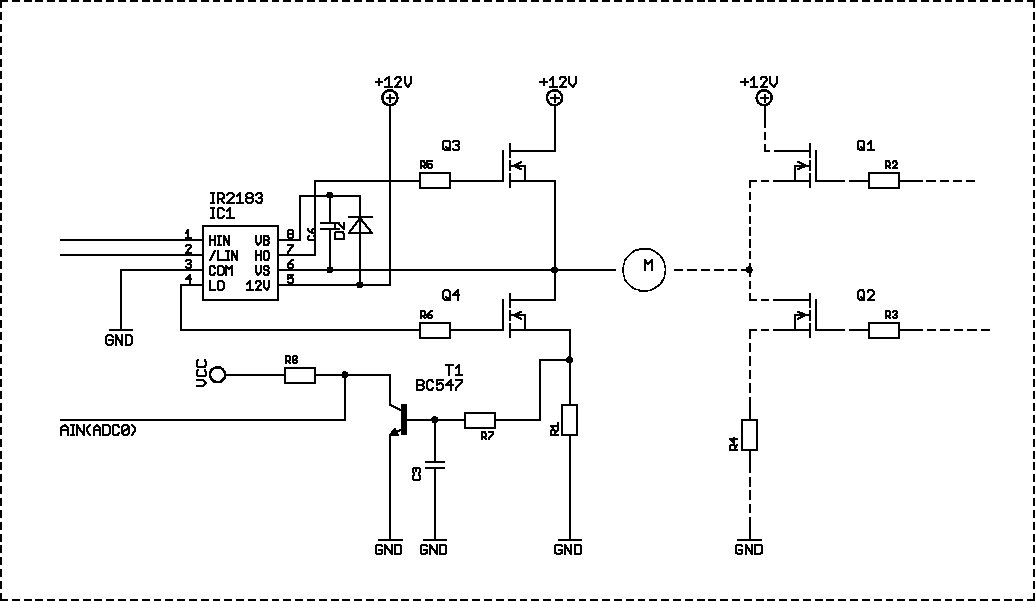
okay das vereinfacht die aufgabe drastisch... ich brauch also "bloß" den PWM (in verstärkter form) auf den motor geben. ich glaube ich werde einen MOSFET wie den IRC540 nehmen, der hat einen sensorausgang für den fließenden strom... da kann ich mir die relativ großen LEM wandler sparen. ich hab bei conrad eine schaltung entdeckt... den schaltplan betrachte ich mal näher und meld mich dann wieder. thx. Martin.
Angehängte Dateien:
-

fahrtregler.png
31 KB
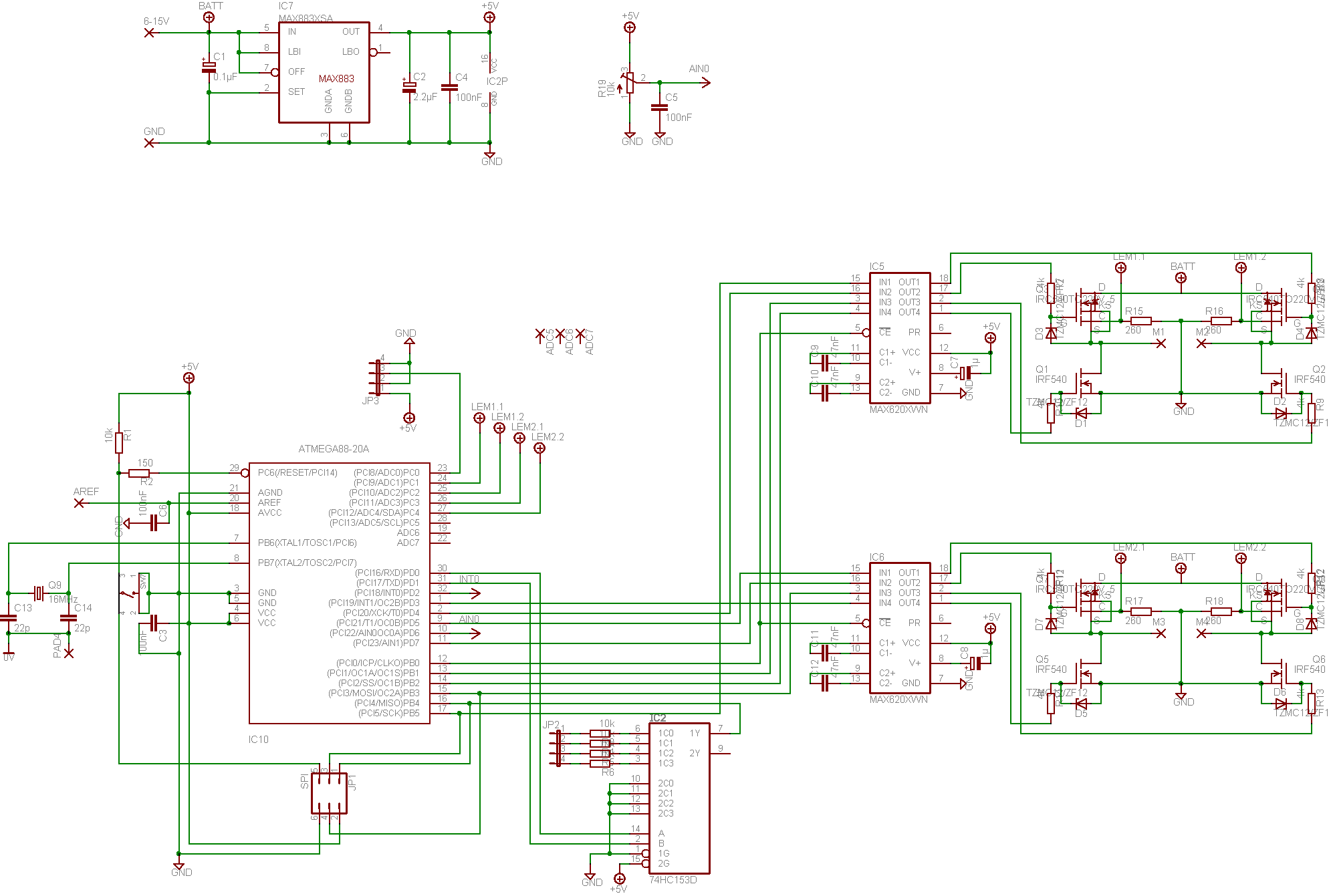
hallo. also ich habe den schaltplan überarbeitet (siehe anhang): als erstes bin ich auf mega88 umgestiegen und hab die zusätzliche logik entfernt. dann bin ich wieder auf die zwei treiber variante umgestiegen. als transistoren nehme ich jetzt ein kombination aus IRC540 (obere) und IRL540 (untere). so konnte ich die lem-wandler hab entfernen, weil der IRC540 einen sense ausgang hat - daran lass ich den µC (über R15, R16, R17, R18) den fließenden strom messen. zur stuererung: einer der IRC540 ist immer an (wird der strom zu groß - 28A sind ca 5V über den messwiderständen - schaltet die sw ab. diese schwelle kann man per R19 einstellen). auf den jeweils gegenüberliegenden (unteren) IRL540 wird das PWM signal gegeben. der treiber tut dann das übrige... zur spannungsbegrenzung hab ich parallel zu den GS strecken eine Z-Diode geschaltet (12V), die übrigen 3V vom treiber sollen aber schon über den vorwiderständen abfallen (bei 250µA am treiberausgang). und jetzt kommt die große frage: geht das so? das ich jetzt nur noch n-kanal fets nehme ist doch kein problem? meine größte sorge ist die DS-Spannung über den FETs... die liegt irgendwo bei 1V. damit sind aber schon 2V weg, bei voller batterie mit 8-9V macht das gerade noch 6-7V und das liegt schon ziemlich an der grenze. wie mach ich das (wegen der richtungsänderung) mit der freilaufdiode für die motoren? und wie groß sollte ein kondensator sein, in die energie beim bremsen umgeladen wird? thx. Martin.
@AxelR: hast du keine zeit mal kurz auf die schaltung zu gucken?
doch jetzt - moment noch... HAttest Du mir das JPG als Schemtic nach Hause gemailt? Ich bring wieder alles durcheinander - na gut. Nehm ich das PNG... Zu dinen MOSFETS der IRL540 macht 100V max. brauchst Du die? der Rds_on liegt bei 0.1 Ohm! Das ist für einen 100V Typ ok. Aber bei 20A hast Du hier schon hohe Verluste I^2xR = 20x20x0.1 macht 40Watt. Da sind noch keine Schaltverluste berücksichtigt - hmmm. Da Du nun den Treiber verwendest, kannst Du dich am Markt umsehen, ob es Typen gibt, die besser abschneiden. Ein IRLR7843 (C* 164398 - 62 ) käme hier bei deinen geringen Betriebsspannungen in Frage. DPACK, also etwas kleiner als D2PACK. Wenns TO220 sein darf, kannst Du dir auch den IRL1004 ansehen. (C* 162758 - 62 ). Als "oberen" MOSFET einen N-Kanal zu verwenden funktioniert in diesem Fall sehr gut, der MAX-Treiber ist ja genau dafür entwickelt worden. Ich persönlich würde eher einen IR2183 auf jeder Seite einsetzen. Das ist aber GEschmackssache ein Argument wäre auf jeden Fall der Preis! ICh habe nun nicht überall nachgesehen, da SEGOR aber "umme Ecke" bei mir ist http://cgi.segor.de/user-cgi-bin/sidestep2.pl?foto=1&Q=max620&M=1 (falls der Link nicht geht - die Teile sind bei Segor gelistet und kosten über 10Euro das Stück, müssen ausserdem erst bestellt werden) Die IR21xx funktionieren zwar erst ab 10-12V. Sind dafür aber überall zu bekommen. Wenn Du Strom messen musst/willst, dann kann man den IRC540 natürlich verwenden. Allerdings dann vlt. doch eher einen IRCZ44/ IRCZ34? Du kannst die Stromüberwachung vom Treiber aus vornehmen lassen http://www.irf.com/technical-info/appnotes/an-1014.pdf sieh Dir i.d.Z. den IR2125 mal an. Die Ansprechschwelle lässt sich nicht einstellen, deine Dreh(moment)regelung mutiert dann, lässt sich aber immernoch dafür verwenden, die Motore und Transistoren sicher zu schützen, wenn Sich der Antrieb zB. im Schlick verfangen haben. Viel wichtiger, bevor ich es vergesse: Die IRC540 in deiner Schaltung müssen nach unten, wenn die Stromporportionale Messspannung der HEXSense Fets gegenüber Masse gemessen werden soll. PWM kann auch von oben kommen, ist egal. Wobei - so beim schreiben, der MAX erzeugt seine höhere Spannung zum Ansteuern der "oberen" Fets mit einer EIGENEN Ladungspumpe. Der IR21xx "verlässt" sich darauf, das der Boostkondensator vom Ausgang umgeladen wird. wenn Du nun mehrere Minuten geradeaus Vollgas fährst, schaltet nichts mehr um... nunja, mir noch nichts negatives bei aufgefallen. Offenbar reicht eine "Ladung" langhin. Wenn Du also die NAX-Dinger schon hast oder günstig bekommst - nimm sie. Ich habe auch schon zur Überstrombegrenzung einen Hallschaltkreis aus einem kleinen Brushlessmotor (DittoLaufwerk) auf die Platine bestückt und in der unteren Lage einen Leiterzug unter dem Schaltkreis verlegt. geht auch, lässt sich allerdings nichts einstellen. Du kannst auch eine Windung dicken Draht um ein Reedrelais wickeln. Funktioniert auch :-)) <<meine größte sorge ist die DS-Spannung über den FETs... die liegt irgendwo bei 1V.>> nimm halt andere (siehe oben). Aber denk bei der Gelegenheit an zus. Schottkydioden parallel zu den Mosfets. Irgentwas "dickes" (kA. hatte welche aus einem alten PC-Netzteil). <<bei voller batterie mit 8-9V >> was'n das für ein Boot? Bei 2Motore - ich bin von 24-30V ausgegangen gg Also was ich oben schon sagte. Bei derart geringen Spannungen auf jeden Fall MOSFETs nach Rds_on aussuchen. Mindestens doppelte U_ds. <<und wie groß sollte ein kondensator sein, in die energie beim bremsen umgeladen wird?>> Ich dachte, Du wolltest die Energie in die Akkus zurückschicken? Ich würde 2x470uF/35V dicht bei den Fets parallelschalten. Hierzu parallel noch eine dicke Supressordiode (wie heissen die Dinger gleich?) 1.5PK33 glaube ich und einen 100nF/50V keramik. Z-diode an den Gates gegen Source ist bei böse Störenden Motorschaltungen immer gut. 12-15V geht alles. ICh sehe gerade:4K im Gate? 33 Ohm, wenns zu sehr im Empfänger stört bis max.100 Ohm wenn die Motorentstörung nichts mehr bringt. Die Z-Dioden überleben das. <<freilaufdiode>> Parallel zu jedem MOSFET kommt je eine. Der Freilaufstrom fliesst dann über MOTOR+ -> P-Kanal rechts -> PLUSPOL Akku - MINUSPOL Akku - > N-KANAL links -> MOTOR-. /bzw über die 470uF. oder eben links lang, je nach Fahrtrichtung. Sorrynochmal wegen der Verzögerung. Hatte arg zutun Gruß AxelR. noch was vergessen? Sieh mal bei YAHOO in den Groups nach "OSMC". Da kann man sich auch einiges abkukkken/abguggen (wie nu eigentlich? abgucken? ich glaube). http://www.robotpower.com/downloads/OSMC_project_documentation_V4_25.pdf
besten dank. die boote aus dem modellbaubereich haben - soweit ich weiß - max 12V akkus. es gibt auch systeme, die auf 7,2V arbeiten (die akkus ham dann 8-9V bei vollem ladezustand). von dem MAX620 hab ich bereits 2 stück da (ich mag Maxim IC - da kannst du das als Sample bestellen und bezahlst gar nichts) den strom so zu messen, wie du das in dem schaltplan hast ist natürlich auch eine gute möglichkeit... die HEXsense FETs kosten aber kaum mehr als die anderen, deswegen werd ich das so lassen. Habe mich jetzt für IRF2804 für die HiSide und für IRCZ44 für die LoSide entschieden (also das auch gleich getauscht, so wie du gesagt hast). Die IRF2804 haben sogar noch einen geringeren Rdson von 2,3mOhm. Da werden dann bei 18A nicht ganz 10W an einer Strecke "verbraten". Das mit dem Gate Widerstand war wohl ein Fehler ;) (Wie find ich eigentlich raus, was für ein Strom da fließt? Bei NPN Transistoren hat man ja dafür die Eingangskennlinie... Aber in den FET Datenblättern hab ich sowas noch nicht gesehen.) Ich will auch, das die Energie in den Akku zurückgeladen wird... Ich wollte nur mal wissen, wie du sowas machen würdest. Wenn du sagst "parralel zum FET", meinst du dann parallel zu DS oder zur GS strecke? Soll heißen: Die Freilaufdioden kommen parallel zur DS Strecke und die Schottkydioden sollen dann noch daneben? (Was bewirken die dann?) Ich werde noch parallel zu den Gate-Widerständen je eine Schottkydiode bauen - wegen der verringerung der Ausschaltzeit vom FET. (So machen dies bei der OSMC) ich bedanke mich wiederholt ;) bis dann. Martin.
Hallo Martin, werde ich Dich diesmal nicht solange warten lassen. lass mich mit einigen Zitaten beginnen <Zitat> http://www.rc-raceboats.de/drifter.shtml Die 3,2mm Flexanlage von Gundert hat vorher die 20 Zellen auch gut ausgehalten, warum soll ich also eine fette und schwere 4,7er nehmen </Zitat> <Zitat> http://www.rc-raceboats.de/zellenzahlen.shtml Es lassen sich natürlich nicht die Geschwindigkeiten erreichen, die einige Boote der 30- Zellen- Klasse zeigen, </Zitat> die Thunder und die Cyclone von Hopf läuft mit 20 oder 30 Zellen mit einer 52Schraube an einem Viper800(16V) Motor. Aber ok, ich wollte nur kurz klären, wie ich zu meiner Annahme kam, das Du mit etwas mehr Spannung unterwegs bist. Auch kosten die Regler im von Dir favoritisierten unteren Spannungsbereich nun wahrlich kein Vermögen. Ein 20 ZellenRegler hingegen schon! Auch deshalb bin ich FEST davon ausgegangen, es handle sich bei Dir um eben diesen etwas "gehobeneren" Spannungsbereich. Nun gut. BTT(BackToTopic) Das da 10Watt zusammenkommen, glaubt man auf den ersten Blick garnicht. Ich habs eben mal nachgerechnet tatsächllich, sind fast 10Watt (18x18x0.03). Ist eine ganze Menge: die Umschaltverluste sind hier noch nicht berücksichtigt... Wobei ein LÖwenanteil im IRCZ44 verbraten werden. Wenn Du dich doch nur überreden lassen könntest, auf die IRCZ zu verzichten, bräuchtest Du in den Fets "nur" ca. 1-2Watt verheizen. 18x18x0.0023=0.75 pro Transistor (wenn dieser KALT ist) Aber gut: seis drum :-)) <<(Wie find ich eigentlich raus, was für ein Strom da fließt? >> Das Gate beim MOSFET ist isoliert vom "Rest" des Transistors. Die Abkürzung MOSFET deutet darauf hin, sollte also garkein Strom fliessen(können); aber sieh selbst: <Zitat> http://de.wikipedia.org/wiki/Mosfet Die Spannung zwischen Gate und Source ... steuert den Stromfluß zwischen Drain und Source. Durch das Gate fließt dabei (fast) kein statischer Strom. Allerdings ist ein, teilweise erheblicher, Lade- und Entladestrom in das Gate auf Grund der Umladung der Gatekapazität nötig, was bei Schalteranwendungen evtl. stromstarke Treiberstufen in der Leistungselektronik bei der V-FFET-Ansteuerung erfordert. </Zitat> Das Gate stellt sich somit als Kondensator der Außenwelt dar. Die Größe des Kondensators ist abhängig von den restlichen Daten des Transistors. Der theoretische Strom beim Umschalten ist unendlich, wird aber durch die Stromergiebigkeit der Treiberstufe begrenzt und ist nur für ein Bruchteil der Umschaltzeit von Nöten. Man begrenzt den Strom derart, das die gewünschten Schaltzeiten (die ja möglichst kurz sein sollen) erreicht werden. Leider weiss ich ausm Kopf jetzt nicht, welcher Wert GENAU für diese Berechnung herangezogen wird. Jedenfalls wird die entsprechende Ladungsmenge in As (Coloumb) angegeben. Im Datenblatt vom IRF2804 hat (ich nehm jetzt einfach mal Qg[total GateCharge]) ist hier mit max.240nC angegeben. Wenn Du dem Gate nun 1Ampere erlaubst zu ziehen, wird er in 240nSekunden seinen aktiven Bereich durchfahren, also von gesperrt nach leitend oder umgekehrt. Die 1Ampere fliessen aber nur am Anfang der 240nSekunden. Beim Ausschalten das gleiche Prozederé. Sind also 480nSekunden, in den der Transistor bei 1Ampere Gate(umlade)strom "mit sich selbst" beschäftigt ist. Sofern Du es überhaupt schaffen solltest, mit dem MAX620 solche Zeiten zu erreichen. Wenn dort Schaltzeiten von mehreren mikrosekunden angegeben sind, kann man von max einigen 100mA ausgehen, die der Schaltkreis schafft. <<Ich werde noch parallel zu den Gate-Widerständen je eine Schottkydiode bauen - wegen der verringerung der Ausschaltzeit vom FET.>> Ob schottky oder nicht: schnell muss sie sein. Die Flussspannung von 0.7V bei Silizium oder 0.3V bei Schottky spielt da keine Rolle. Da sperrt der MOSFET längst. Was nützt es, wenn der MAX620 es sowieso nicht schafft, diesen erhöhten Strom aufzunehmen. Kannst es aber gern antesten. <<Energie in den Akku zurückgeladen...wie du sowas machen würdest.>> Motorstrom beim Bremsen über den Akku leiten. Google mal nach "Rekuperation" Wie es nun genau ging, weiss ich nun auch nicht mehr - gebe ich zu. [Sehr ärgerlich] Hatten wir hier im Forum eine ellenlange Diskussion, wenn ich mich recht erinnere. Ist aber zu lange her - tut mir leid :-(( <<Wenn du sagst "Dioden parralel zum FET",>> Nein, ganz sicher: ich sagte "parallel" :-)) Im Ernst: Du magst Dich wundern oder nicht, da im MOSFET ja schon diese parasitäre Diode (Bodydiode) enthalten ist. Diese Dioden haben idR. sehr schlechte Werte und sollten durch Dioden mit geringerer Flussspannung überbrückt werden. Die interne Diode vom IRF2804 geht allerdings, wenn man sich (im Nachhein) das Datenblatt ansieht, ok. Bei gerademal 20Ampere müsste man testen, ob eine Schottky hier besser abschneidet (Flussspannung, Schaltzeiten). Sonst hast Du zusätzlich zu deinen prognostizierten 10Watt auch noch einige Watts, wenn der MOSFET sperrt (18Ax0.7V angenommene Flusspannung der internen Diode = 12.6Watt) Ich hatte ja schon erwähnt, dass der Motorstrom bei langsamerer Fahrt größer wird, als bei voller Spannung. Siehe Step-Down Regler. Und ja, die Diode kommt zwischen DS. <<ich mag Maxim IC...Sample bestellen und bezahlst gar nichts>> Ich enthalte Dir meine Meinung zu diesem Thema vor. Andere kennen diese und das reicht. <<den strom so zu messen, ... ist ... auch eine gute möglichkeit>> Aber nur eine von einigen, du kannst auch den Rds_on vom IRF2804 als Messwiderstand benutzen. Natürlich nur dann, wenn dieser leitet. Die Spannung über diesem ist dem Stromfluss proportional, aber stark Temparaturabhängig(positiv, bei höherer Temp. wird mehr Strom suggeriert - um so besser, geht nichts kaputt, es wird aber eher abgeschaltet). Hast Du schon eine Idee, wie das ansatzweise umsetzen könnte??;-) <<die HEXsense FETs kosten aber kaum mehr>> doch: 10x mehr Verlustleistung!!1000prozent Steigerung? kA... So, viel Spass weiterhin AxelR. heute mal ohne Anhang...
nun ja... es handelt sich nicht direkt um ein rennboot. die empfangselektronik ist auch so unkonventionell und blöd, dass man einen regler für zwei motoren nur schwer daran baun kann. außerdem wollt ich sowas mal bauen :) um den rds zum messen zu nehmen würd ich die drüberliegende spannung nutzen um einen npn transistor anzustuern. halt um die zu verstärken und zu verhindern, dass ein zu großer strom in den µC fließt. (quasi so wie in deinem plan, den du angehangen hattest über dem R1) (mein erster gedanke war, mit dem ADC direkt über de Rds zu messen - war mir aber zu unsicher, falls mal ein zu großer strom zum µC fließt.) die temperaturabhängigkeit ist allerdings nicht so schön. aber dann muss ich das halt so dimensionieren, dass diese kurve einen akzeptablen verlauf hat. nungut. ich bin zwar nicht ganz glücklich darüber, aber ich werde mich wohl gegen den IRCZ44 entscheiden. die 9W müssen ja auch abgeleitet werden. da kann dann der kühlkörper etwas kleiner ausfallen :) grüße. Martin.
Bitte melde dich an um einen Beitrag zu schreiben. Anmeldung ist kostenlos und dauert nur eine Minute.
Bestehender Account
Schon ein Account bei Google/GoogleMail? Keine Anmeldung erforderlich!
Mit Google-Account einloggen
Mit Google-Account einloggen
Noch kein Account? Hier anmelden.