Hallo zusammen Ich habe ein Frage zu den jenigen, die schon Mal Mit NIN-BUS beschäftig waren. habe mir ein Prototype gebaut, das Prototype beinhaltet 3 Platinen auf jeder Platine habe ich Mikrocontroller ein Lin -Transceiver und natürlich andere Elektronik . auf der erste Platine „Master„ habe ich Bedienelemente aufgesetzt (3Taster, 2 schalter und ein Joystick ) dadurch möchte ich verschiedene Anzeige Elemente( LED´s , ein Gehtrieb Motor und Außen Spiegel) steuern, die auf zweite bzw. dritte Platinen „Slave´s“ platziert. Ich möchte jetzt dieses Hardware Testen, ich habe die AppNotes von Atmel (AVR322, AVR308) geguckt, ich könnte damit nicht anfangen, kann mir bitte jemanden helfen, und mir erklären wie ich mit den Software anfangen kann?, wie sollte das Programm Struktur ausgesehen?. PS: als Controller habe ich die AT90CAN128 und 2 Atemega128 Als Lin-Transceiver die ATA6661 von Atmel
das ist die struktur die du ungefähr in deiner UART Kommunikation
einhalten musst.
Es ist Code von meinem LIN Projekt mit einem Fujitsu.
__interrupt void RxIRQHandler(void)
{
/*===========================*/
/*====== Master Code =====*/
/*===========================*/
if(SW_State==SW_ST_MASTER)
{
if(ESCR2_LBD) /* LIN Break detected?
*/
{
ESCR2_LBD = 0; /* clear Int. flag
*/
if(LIN_State==LIN_ST_READY)
{
SCR2_RXE = 1; /* Enable reception
*/
TDR2 = 0x55; /* Send Syncfield
*/
LIN_State = LIN_ST_RECEPTION;
LIN_Checksum = 0;
LIN_Count=0;
}
else
{
LIN_Rx_Error = LIN_BREAK_ERR;
}
}
else if(SSR2_RDRF) /* reception Data reg full?
*/
{
LIN_Rx_Data=RDR2; /* get Reception Data
*/
if(SSR2_ORE || SSR2_FRE) /* reception error ?????
*/
{
LIN_Rx_Error = LIN_REC_ERR;
}
switch (LIN_State)
{
/*===========================*/
/*====== RECEPTION =====*/
/*===========================*/
case LIN_ST_RECEPTION:
if (LIN_Rx_Data != 0x55)
{
LIN_Rx_Error = LIN_SYNC_ERR;
}
else
{
TDR2 = LIN_Header;
LIN_State=LIN_ST_HEADER;
}
break;
/*===========================*/
/*====== HEADER =====*/
/*===========================*/
case LIN_ST_HEADER:
if(LIN_Rx_Data != LIN_Header) /* if sent header ==
header*/
{
LIN_Rx_Error = LIN_HEADER_ERR;
}
else
{
/* Master Send */
if(LIN_REQUEST)
{
TDR2=LIN_Data[LIN_Count]; /* first
byte */
LIN_Checksum = LIN_Data[LIN_Count];
}
LIN_State = LIN_ST_DATA;
}
break;
/*===========================*/
/*====== DATA =====*/
/*===========================*/
case LIN_ST_DATA:
/* Master Send */
if(LIN_REQUEST)
{
if(LIN_Rx_Data != LIN_Data[LIN_Count])
{
LIN_Rx_Error=LIN_DATA_ERR;
}
LIN_Count++;
if(LIN_Count == LIN_LENGTH)
{
/* if all
sent */
LIN_Count=0; /* Byte
Count */
LIN_State=LIN_ST_CHECKSUM; /* Next Byte
ist:Checksum */
TDR2=LIN_CHECKSUM; /* Send
Checksum */
}
else
{
TDR2 = LIN_Data[LIN_Count];
LIN_Checksum += LIN_Data[LIN_Count];
}
}
/* Master Receive */
if(LIN_RESPONSE)
{
LIN_Data[LIN_Count] = LIN_Rx_Data; /* store
Slave Data*/
LIN_Checksum += LIN_Data[LIN_Count];
LIN_Count++;
if(LIN_Count == LIN_LENGTH)
{
LIN_Count = 0;
LIN_State = LIN_ST_CHECKSUM;
LIN_Checksum=LIN_CHECKSUM;
/*
Checksum */
}
}
break;
/*===========================*/
/*====== CHECKSUM =====*/
/*===========================*/
case LIN_ST_CHECKSUM:
if(LIN_Rx_Data != LIN_Checksum) /* compare
Checksum */
{
LIN_Rx_Error=LIN_CHECK_ERR;
}
SCR2_RXE = 0;
LIN_State = LIN_ST_NEXT;
break;
}
}
else
{
LIN_Rx_Error=LIN_UNKNOWN_ERR;
SSR2_RIE = 0; /* disable reception int
*/
}
}
/*===========================*/
/*====== Slave Code =====*/
/*===========================*/
if(SW_State==SW_ST_SLAVE)
{
if(ESCR2_LBD) /* LIN Break detected?
*/
{
ESCR2_LBD = 0; /* clear Int. flag
*/
if(LIN_State==LIN_ST_READY)
{
SCR2_RXE = 1; /* Enable reception
*/
LIN_State = LIN_ST_RECEPTION;
LIN_Checksum = 0;
LIN_Count = 0;
ICS67_ICP6 = 0; /* clear possible int flag
*/
ICS67_ICE6 = 1; /* enable ICU6 for sync
measure. */
}
else
{
LIN_Rx_Error = LIN_BREAK_ERR;
}
}
else if(SSR2_RDRF) /* reception Data reg full?
*/
{
LIN_Rx_Data=RDR2; /* get Reception Data
*/
if(SSR2_ORE || SSR2_FRE) /* reception error ?????
*/
{
LIN_Rx_Error = LIN_REC_ERR;
//SCR2_CRE=1;//test
}
switch (LIN_State)
{
/*===========================*/
/*====== Slave RECEPTION ====*/
/*===========================*/
case LIN_ST_RECEPTION:
ICS67_ICE6 =0; /* disable ICU6 int.
*/
if (LIN_Rx_Data != 0x55) /* sync field false
information */
{
LIN_Rx_Error = LIN_SYNC_ERR;
}
else
{
LIN_State = LIN_ST_HEADER;
SCR2_CRE=1; /* Clear All Errors (Framing)by
timer */
}
break;
/*===========================*/
/*====== Slave HEADER =====*/
/*===========================*/
case LIN_ST_HEADER:
LIN_Header = LIN_Rx_Data;
if(LIN_RESPONSE) /* Slave
Send */
{
TDR2=LIN_Trans_Buff[LIN_Count][SW_Slave-1];
/* Slave send
byte 1 */
LIN_Count++; /* send
*/
LIN_State=LIN_ST_DATA;
}
else
{
if(!LIN_REQUEST)/* do nothing if no request and
response */
{
LIN_State = LIN_ST_READY;
SCR2_RXE = 0; /* Disable
reception */
}
else
{
LIN_State=LIN_ST_DATA;
}
}
break;
/*===========================*/
/*====== Slave DATA =====*/
/*===========================*/
case LIN_ST_DATA:
/* Slave Receive */
if(LIN_REQUEST)
{
LIN_Checksum += LIN_Rx_Data;
LIN_Rec_Buff[LIN_Count][SW_Slave-1]=LIN_Rx_Data;
/* 1-8 bytes
receive */
LIN_Count++;
if(LIN_Count == LIN_LENGTH)
{
LIN_Count = 0;
LIN_State = LIN_ST_CHECKSUM;
LIN_Checksum=LIN_CHECKSUM;
/* Gen
Checksum */
}
}
else
{
/* Slave Send */
if(LIN_RESPONSE)
{
LIN_Checksum += LIN_Rx_Data;
TDR2=LIN_Trans_Buff[LIN_Count][SW_Slave-1];
/* Send next
Bytes 2-8 */
LIN_Count++;
if(LIN_Count == LIN_LENGTH)
{
LIN_Count = 0;
LIN_State = LIN_ST_CHECKSUM;
LIN_Checksum=LIN_CHECKSUM;
/* Send
Checksum */
}
}
}
break;
/*===========================*/
/*====== Slave CHECKSUM ====*/
/*===========================*/
case LIN_ST_CHECKSUM:
/* Slave Receive */
if(LIN_REQUEST)
{
if(LIN_Rx_Data != LIN_Checksum) /* compare
Checksum */
{
LIN_Rx_Error=LIN_CHECK_ERR;
}
LIN_State = LIN_ST_NEXT;
}
else
{
/* Slave Send */
if(LIN_RESPONSE)
{
TDR2 = LIN_Checksum; /* Send
Checksum */
LIN_State = LIN_ST_NEXT;
}
}
SCR2_RXE = 0; /* Disable
reception */
break;
}
}
else
{
LIN_Rx_Error=LIN_UNKNOWN_ERR;
SSR2_RIE = 0; /* disable reception int
*/
}
}
}
Dennis
...darin spiegelt sich das Protokoll der Version 1.3 - Master wie Slave seitig - des LIN wieder. zudem würde ich mir die Protokolldefinition mal runterladen, das hilft u.u. ungemein, auch um diesen code zu verstehen... dennis
Hi, bin wieder nach einer Woche, und habe eine Frage zu erst Danke dir Dennis, dein Struktur hat mir viel geholfen, ich könnte jetzt die AppNote AVR322 verstehen insbesondere die UART Kommunikation , ich habe mir auch den LIN Protokoll durch gelesen. Um mein Hardware zu testen, habe den Quellcode angepasst, möchte auf mein Controller AT90CAN128 Drauf tun, ich konnte das leider nicht hin kriegen, es fehlt leider ein H-datei ich habe nur einen Fehler in den Code und zwar : ( ../main.c:48:19: inavr.h: No such file or directory ) Es scheint das header datei #include "inavr.h" wurde nicht erkannt. Weiß vielleicht jemand von euch was das ist? Ich glaube es hat mit (Interrupt, Timer) was zu tun , weil wenn ich das Header aus blende ( // #include "inavr.h") krige ich insgesammt 5 fehler : ../timer1ovf_isr.c:71: error: syntax error before "void" ../timer1ovf_isr.c: In function `TIMER1_Overflow_ISR': ../timer1ovf_isr.c:77: error: `TCNT1H' undeclared (first use in this function) ../timer1ovf_isr.c:77: error: (Each undeclared identifier is reported only once ../timer1ovf_isr.c:77: error: for each function it appears in.) ../timer1ovf_isr.c:79: error: `TCNT1L' undeclared (first use in this function) make: *** [timer1ovf_isr.o] Error 1 Build failed with 5 errors and 2 warnings... Ich hoffe hilft das, was ich betrieben habe, um header zu erkennen. danke
hie ist Quellecode für den Module wo die fehler getroffen sind .
#include "config.h"
#include "master_lin.h"
extern U8 Buf_SET_SLAVE [8];
extern U8 Buf_GET_SLAVE_0[4];
extern U8 Buf_GET_SLAVE_1[4];
extern U8 Buf_GET_SLAVE_2[4];
U16 CmdCtr ;
//**********************************************************************
****
// Timer overflow interrupt service routine
//
// Overflow Rate is Tbit - 2400 Tbit = 416us
// 4800 Tbit = 208us
// 9600 Tbit = 104us
// 19200 Tbit = 52us
//
//**********************************************************************
****
#pragma vector=TIMER1_OVF_vect
__interrupt void TIMER1_Overflow_ISR (void)
{
// Reload: Set Timer Value for a Tbit overflow
TCNT1H = _8MHZ_TCNT1H;
TCNT1L = _8MHZ_TCNT1L;
if(19200 == CmdCtr)
{
CmdCtr = 0;
}
else
{
CmdCtr++;
}
l_sch_tick(); //call lin slave handler
}
Angehängte Dateien:
-

LinMaster.JPG
84 KB
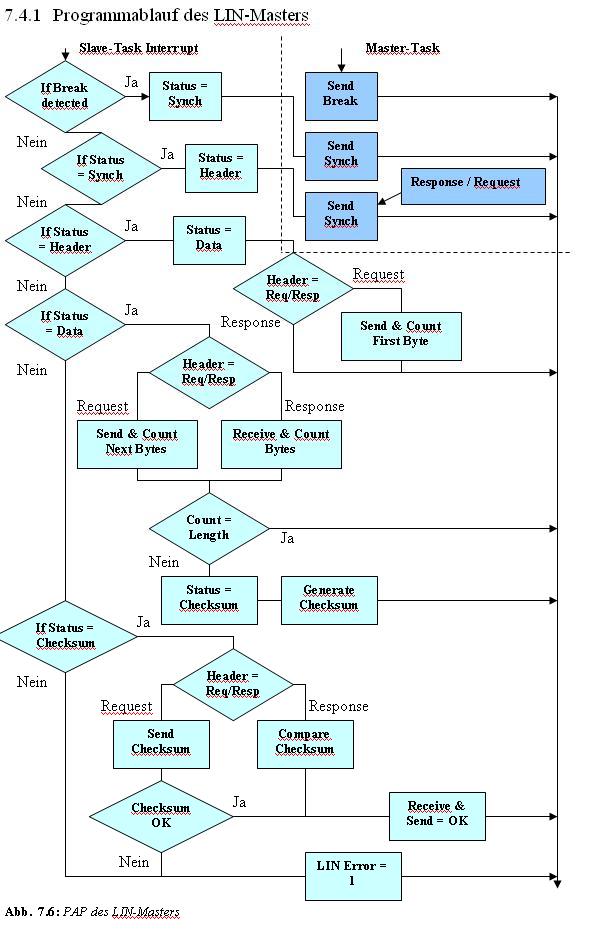
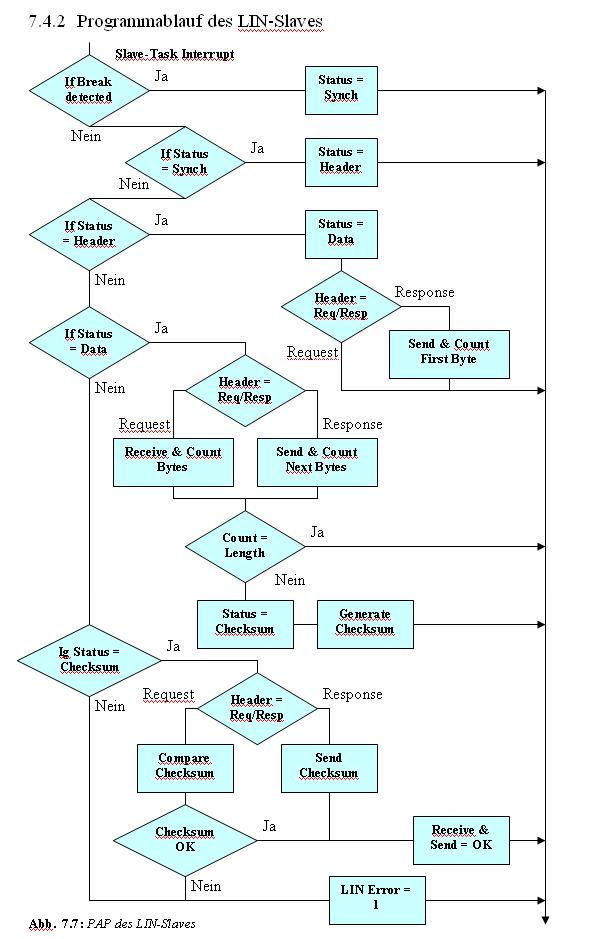
Hallo, leider kann ich zu dem Thema mit einem atmel eher weniger sagen. hier aber mal die PAP's des codes auch für andere. Dennis
... deine errors seher mir so auf die schnelle nach einem include oder make problem aus.... kaum zeit, dennis
Frage: Gute Code, leider verstehe ich nicht wie Du die Variablen z.B. "LIN_Rx_Error" definieren kann.
Noch eine Frage: wie kann man den Break detektieren? Im Program ist so geschrieben: if(ESCR2_LBD) /* LIN Break detected? */ Aber wie ist ESCR2_LBD definiert? Bitte send mir ein Email, wenn jemand Antwort hat. Vielen Dank!
bei den ATMEGA168 gibt es ein Framing error flag. ist dieses im slave gesetzt so liegt das break field vor. und das nächste im erhaltende byte wäre dein sync field
Bitte melde dich an um einen Beitrag zu schreiben. Anmeldung ist kostenlos und dauert nur eine Minute.
Bestehender Account
Schon ein Account bei Google/GoogleMail? Keine Anmeldung erforderlich!
Mit Google-Account einloggen
Mit Google-Account einloggen
Noch kein Account? Hier anmelden.