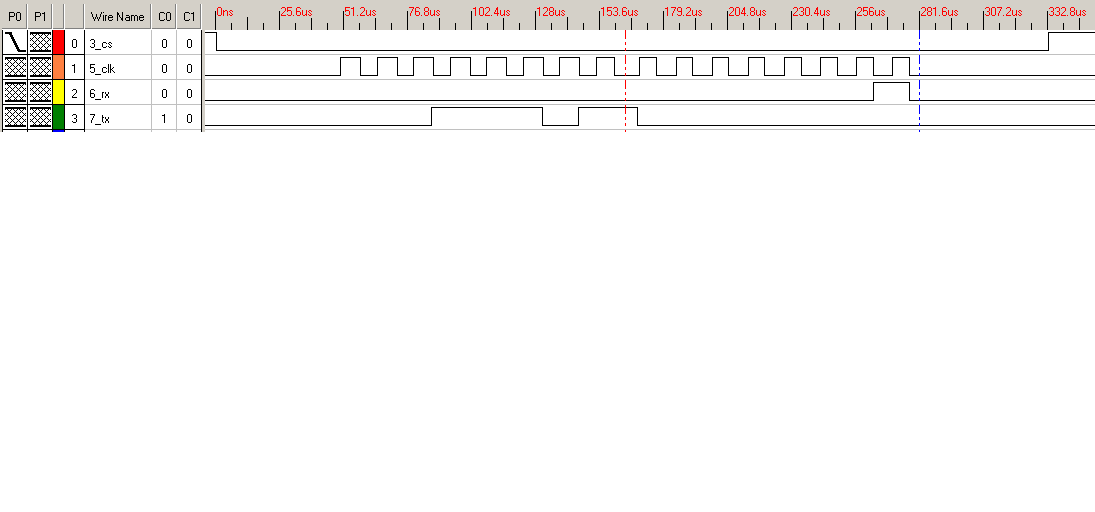
Hallo zusammen, ich versuche an einen Renesas M16C29 den Microchip enc28j60 anzuschliessen. Leider gelingt mir das nicht. Mittlerweile habe ich alles ausprobiert, was mir eingefallen ist und es läuft noch immer nicht. Ich schreib jetzt mal, was ich gemacht habe bzw wie ich es verstanden habe und vielleicht findet ja jemand, der etwas Erfahrung mit dem enc28j60 oder/und M16C hat, meinen Fehler. Die Kommunikation erfolgt via SPI, das Hardware SPI des M16C habe ich zuerst versucht zu konfigurieren, mit mehr oder weniger Erfolg. Um es besser verstehen zu können habe ich dann eine Software SPI auf denselben Ports geschrieben. Ich habe das so aus dem Microchip-Manual verstanden, dass der M16C Daten auf der steigenden Flanke sendet und der enc28j60 auf der sinkenden Flanke Daten zurücksendet. Ausserdem muss das Clocksignal bei Idle auf Low-Pegel sein. Die Selectleitung ist bei Nichtbenutzung auf High, bei Benutzung wird der enc28j60 via Low ausgewählt. Mein Problem ist, dass mir der enc28j60 nicht mit erwarteten Werten antwortet, als Beispiel versuche ich das ESTAT-Register zu lesen, das LSB soll dort auf 1 gesetzt werden, wenn der Oszillator sich eingeschwungen hat. (ESTAT.CLKRDY) Im Anhang ist das auf dem Logikanalyser zu sehen. Der Ausschnitt wurde einige Zeit nach Anschalten gemacht, das Bit sollte also 1 sein. Der enc28j60 liefert aber 0x02, das sehe ich im Logikanalyser als auch im M16C. Ich möchte den AVR-Lib Treiber für den enc28j60 benutzen, darauf möchte ich uIP bauen. Zur Entwicklung benutze ich den IAR Embedded Workshop in der kostenlosen Variante (< 16k). Zum Flashen wird der E8-Debugger von Renesas benutzt. ciao Christian Hier noch der Quelltext meiner Software SPI (falls notwendig): (Das Cableselect Signal wird in einer anderen, höheren Funktion gesetzt, ich hoffe die Makros sind selbsterklärend.) void tx( unsigned char value ) { unsigned char bits; __disable_interrupt(); for (bits = 8; bits > 0; bits--) { if (value & 0x80) { SPI_TX_ON; } else { SPI_TX_OFF; } value <<= 1; SPI_CLK_OFF; // rising edge SPI_CLK_ON; } SPI_CLK_OFF; __enable_interrupt(); } unsigned char rx(unsigned char extradummy) { unsigned char bits; unsigned char value = 0x00; __disable_interrupt(); SPI_TX_OFF; // dummy 0x00 // send dummy byte if(extradummy) { for (bits = 8; bits > 0; bits--) { SPI_CLK_ON; SPI_CLK_OFF; } } // end dummy byte for (bits = 8; bits > 0; bits--) { SPI_CLK_ON; // falling edge SPI_CLK_OFF; value <<= 1; if(SPI_RX_VAL) { value |= 0x01; } } SPI_CLK_OFF; __enable_interrupt(); return value; }
Angehängte Dateien:
-

spi.PNG
3 KB
Vielleicht noch etwas zu der Hardware. Ich benutze das Renesas Starterkit RSKM16C29, den Enc28j60 benutze ich auf der Olimex-Platine http://www.olimex.com/dev/enc28j60-h.html. Ich betreibe beide Controller mit 3.3V, die Ports sind direkt verbunden, keine Pegelwandler. Am M16C29 (80 PIN Variante) sind es die Pins 25 CLK, 26 RX, 27 TX, 23 CS. Interrupts werden keine benutzt.
Ich habe inzwischen rausgefunden, dass mein Clocksignal so nicht richtig war, mit "high" bei Nichtbenutzung hat es besser funktioniert. Ausserdem weiss ich jetzt, dass ich die älteste Silicon-Version habe Refid=2, die soll unter 8MHz SPI-Takt nicht zuverlässig funktionieren. Da auch das Manual nicht richtig eindeutig ist, gebe ich auf.
Hi, ich hab es mit einem M16C28 versucht. Habe den Code von Nick Bambig umgeschrieben. Bei mir hat sich beim Ping Test nach 20 mal das Prg. aufgehängt. Meines erachtens liegt es am SPI des M16C. Mfg Sascha. PS Das gleiche hat mit einem ATmega644 sofort funktioniert
Hallo, bei mir läuft das Hardware-SPI einwandfrei (M32C/83). Die Einstellungen sind folgendermaßen: u2brg = 0x00 (halber Prozessortakt) u2mr = 0x01 u2c0 = 0x90 u2c1 = 0x05 u2smr = 0x00 u2smr2= 0x00 u2smr3= 0x02 u2smr4= 0x00 So müsste das auf dem M16C/29 auch funktionieren. Andernfalls ist bei den Pin-Einstellungen oder in den Übertragungsroutinen irgendwo ein Fehler. Ich würde aber mal darauf tippen das Du das CKPH-Bit (u2smr3) übersehen hast. Dies ist in "Special Mode 2" beschrieben. Wenn es nicht gesetzt ist passt das Clock-Signal nicht. Ich verwende ebenfalls eine alte Version des ENC28J60. Die Übertragung hat ab 500 kHz dennoch einwandfrei funktioniert. Nicht aufgeben! Gruß Judge
So geht es bei mir gar nicht! Bei halbem Takt (10MHz) funktioniert der M16C nicht mehr, er macht dann extra Bytes dazwischen. Vermutlich Wartebytes oder so. Nur unterhalb von 1 MHz geht das. u2brg = 0x00 (halber Prozessortakt) u2mr = 0x01 u2c0 = 0x90 u2c1 = 0x05 u2smr = 0x00 u2smr2= 0x00 u2smr3= 0x02 u2smr4= 0x00 Die Einstellungen hatte ich auch so, hat aber nicht hingehauen (eben nochmal getestet). Es scheint so, als wären die Bytes um eine Stelle verschoben, anstatt bei ESTAT 0x01 zubekommen sehe ich 0x02 zB. Das hatte ich via Software-SPI versucht zu lösen, das Clocksignal auf High zwischen den Bytes. das hatte etwas besser funktioniert, zumindest ESTAT und EREVID (die Silicon-ID) sahen danach ok aus. Judge, welchen Treiber benutzt Du? Ich glaube auch, dass das, was ich gemacht habe, ewt nicht so gut ist. Ich habe den AVR-Treiber der AVR-LIB portiert.
So, ich habe wieder den halben Tag rumprobiert und gesucht. Kein Fortschritt. Ich habe die Initialisierung etwas verändert, sie ist jetzt quasi gleich der von Microchip. Problem ist zB die MAC-Adresse, die ich nicht setzen kann. Ich bekomme immer an der Adresse MAADR0 den Wert zurück, den ich an einer der Mac-Adressen (MAADR0 - MAADR5) zuletzt geschrieben habe. Die übrigen Werte sind immer 0x00. Ich hänge mal den Treiber von mir an, vielleicht interessiert sich ja jemand dafür. Vielleicht sieht jemand sogar ein Problem.
Ja, das Problem wird sein das gewartet werden muss bis die Daten die gesendet werden sollen im Übertragungsregister angekommen sind (ti-flag). Anders hat es bei mir bisher jedenfalls nicht funktioniert. Ich war mal so frei und habe Deine Übertragungsroutinen dahingehend ein klein wenig abgeändert. So sollte das Hardware-SPI auf jeden Fall korrekt funktionieren. Als Treiber habe ich übrigens auch die AVR-Lib portiert. Bisher gabs damit keine Probleme. Deinen Treiber habe ich mir jetzt nicht angeschaut da ich denke das das Problem bei der Kommunikation liegt.
So, jetzt habe ich auch noch einen Blick auf den Treiber und die Initialisierung geworfen. Die sind so in Ordnung. Es handelt sich bei Dir also definitiv um ein Kommunikationsproblem. Laut Datenblatt des ENC28J60 müssen die Daten übrigens bei steigender Flanke eingelesen werden, und das Clock-Signal sollte zwischen den Übertragungen Low-Pegel haben. Diese beiden Fehler solltest Du in der Software-SPI noch beheben. Hardware-SPI hatte ich ja oben schon beschrieben.
Super, ich bin jetzt weiter als je zuvor. Ich musste zu Deiner Version noch eine Zeile hinzufuegen damit es läuft. (while(READ_U2C0_TXEPT == U2C0_TXEPT_FULL);) Beim TX muss man noch auf U2C0.TXEPT warten, sonst gerät es aus dem Takt. (das CS ist schon oben bevor beide Bytes über die Leitung gingen) Das mit der MAC geht jetzt, viel mehr kann ich noch nicht sagen. Das muss ich mir jetzt erstmal genauer ansehen. Ich habe das noch mit dem Extradummy eingebaut, siehe Anhang. Vielen vielen Dank schonmal. Trotzdem sehe ich den grossen Unterschied zu meiner Version gar nicht...
Oh, sorry. Das txept-Flag hatte ich vergessen einzufügen. Klar das das Programm dann schon ein Stück weiter ist, insbesondere bei langsamen SPI-Takt. Beim Empfangen kannst Du Dir die Abfrage von txept aber sparen, da ri (fast) zeitgleich gesetzt wird. Der einzige Unterschied ist der das Du jetzt direkt nach dem Schreiben ins Transmit-Register wartest bis die Daten dort angekommen sind (ti-Flag). Sonst war die Programmabfolge schon richtig. Funktioniert die Kommunikation jetzt auch bei höherer Übertragungsgeschwindigkeit fehlerfrei?
Bei der Kommunikation komme ich nicht über 1 MHz hinaus, sonst schickt der M16C nur noch Murks. Das ist weiterhin so. Ich werde aber mal einen anderen M16C29 testen, vielleicht macht der das besser. Das txept werd ich noch wegmachen, hatte ich mir schon gedacht. Danke nochmal, vielleicht schaffe ich es auch bald etwas IP-artiges drüberzubauen...
Habe gerade ein ähnliches Problem, die SPI-Kommunikation zw. einem ATmega128 und dem ENC28J60 funktioniert nur bis 1MHz einwandfrei. Ich habe testweise mal folgende MAC-Adresse programmiert: MAADR1 = 0x01 MAADR2 = 0x02 MAADR3 = 0x03 MAADR4 = 0x04 MAADR5 = 0x05 MAADR6 = 0x06 Beim Auslesen der 6 Register erhalte ich bei niedrigen SPI-Frequenzen wie erwartet 0x06-0x05-0x04-0x03-0x02-0x01 Bei höheren Frequenzen erhalte ich jedoch 0x01-0x06-0x05-0x04-0x03-0x02 Mein ENC ist übrigend die Version 5. Hast du bereits eine Lösung für dein Problem gefunden? Gruß Thorsten
Viele Möglichkeiten kommen da eigentlich nicht mehr in Frage. Beim M16C läuft es mit den o.g. Einstellungen jedenfalls einwandfrei. Kommen die Daten denn tatsächlich falsch raus oder werden sie nur falsch gelesen? Sind die Pull-Up Widerstände ausreichend dimensioniert?
Sch..., wenn man blöd ist :) Die MAADRx-Register gehören zur MAC-Einheit und folglich umfaßt ein vollständiger Schreibzyklus 16 Bit ein Lesezyklus hingegen 24 Bit. Das habe ich nicht beachtet, und jeweils nur 16 Bit eingelesen. Dadurch läßt sich das o. g. Phänomen vollständig erklären. Datenblatt sorgfältig lesen ist also nie verkehrt :) Trotzdem beruhigend. Ich hatte schon Angst, dass mit den Pegeln und dem Layout was nicht stimmt.
Ich habe festgestellt, dass mein enc28j60 relativ häufig Ethernetpakete zerstört. Grover Schätzung nach sind 1% kaputt, man sieht dann z.B. eine Byteverschiebung irgendwo in der Mitte. Ich habe ja nun die fehlerhafte Rev 2, die ich mit ca 900 kHz betreibe. Thorsten, läuft Deine Ref 5 vielleicht besser? An sich ist das kein Problem, um die kaputten Frames müsste sich dann das IP kümmern.
Also ... Mein enc28j60 funktioniert wirklich schlecht! Ich habe jetzt einen kleinen IP-Stack mit ICMP fuer Echos gemacht. Wenn ich mal ein längeres Pingen mache sind 10 - 20% der Pakete zerstört. Die Fehler sind unterschiedlich, teilweise gehts 100 mal gut, dann wieder ne Zeit gar nicht. Ich denke es liegt an der SPI-Kommunikation, die ist wohl nicht zuverlässig. Morgen werde ich verschiedene Geschwindigkeiten fuer SPI ausprobieren, vielleicht bringt das was. Einen neuen enc28j60 habe ich auch, allerdngs nur den Chip an sich und das noch in einer Grösse, die ich nicht mehr selbst einlöten kann...
Problem gelöst, die Interrupts meiner Uhr waren das Problem... Während des Sendens und Empfangens sollten keine Interrupts kommen.
Sorry, das ich Thread wieder ausgrabe. Versuch mich gerade, den ENC28J60 mit einem M16C62P zu verbinden. Laut App.-Note REU05B0019-0100Z kann der M16C nur Mode 1 und Mode 3. Der ENC brauc laut Datenblatt Mode 0. Im Post von Judge vom 2.12.2006 steht: So müsste das auf dem M16C/29 auch funktionieren. Andernfalls ist bei den Pin-Einstellungen oder in den Übertragungsroutinen irgendwo ein Fehler. Ich würde aber mal darauf tippen das Du das CKPH-Bit (u2smr3) übersehen hast. Dies ist in "Special Mode 2" beschrieben. Wenn es nicht gesetzt ist passt das Clock-Signal nicht. Im Datenblatt steht das Bit aber für Clock Delay. Habe ich irgendwas übersehen oder falsch verstanden? Gruß Sascha
Hi colleagues, I has work very strong to translate german to english language, and then english to spanish. Excuse that i write in (bad) English. Using MC16/29 or M16C/28 SPI port with ENC28J60 is possible by means of a small trick. I explain it: 1. Using SIO3 SPI port (following M16C/29 hardware manual). 2. Very important!. Set S3C control register to 0x68 value (01101000 = f1, Sout3 enable, Sout3 output CLK3 function, CLK polarity TX ouput at falling edge and RX data at rising edge, msb first, internal clock). 3. The trick!. To solve the idle clock state problem, we need to make a "false" falling os clock signal (SCK), at end of every read/write operation. This example is fully explanatory: First, place a pull-down resistor () in SCK (P3.0) pin. Then, replace "CS to OFF" operation with this code: S3C.6 = 0; // External clock P3D.0 = 0; // P3.0 (SCK) pin to input mode P3.3 = SIGNAL_OFF; // Chip Select signal to OFF P3D.0 = 1; // P3.0 (SCK) pin returns to output mode S3C.6 = 1; // Internal clock I work correctly with a 12,5 MHz SPI clock. About TCP/IP, network drivers (ENC28J60 included) for tiny CPU's, best tutorials, code, hardware and reference guides and more...: http://tuxgraphics.org/electronics/200611/article06111.shtml http://tuxgraphics.org/electronics/200606/article06061.shtml http://tuxgraphics.org/common/src2/article06111/ http://hubbard.engr.scu.edu/avr/avrlib/ http://www.microchip.com/stellent/idcplg?IdcService=SS_GET_PAGE&nodeId=1489&redirects=tcpip Best regards, Eduardo
Hi Eduardo, it's maybe possible to make public your driver? Regards, Alex
Bitte melde dich an um einen Beitrag zu schreiben. Anmeldung ist kostenlos und dauert nur eine Minute.
Bestehender Account
Schon ein Account bei Google/GoogleMail? Keine Anmeldung erforderlich!
Mit Google-Account einloggen
Mit Google-Account einloggen
Noch kein Account? Hier anmelden.