Hi! Ich besuche zur Zeit die 5 Klasse und mache die MATURA!!! Unser Projekt ist schon fast fertig, uns fehlt nur noch die Funkübertragung!! Nun meine Frage: -Wir verwenden nämlich Funkmodule vom Conrad!! Empfänger: FM EMPF. 433MHZ 5V -111DBM RX-4M50FM60SF Sender: FM SENDER 433MHZ 10MW 2,7/5V TX-4MAVPF10 Unser Aufgabe ist es mit dem PIC12F675 und den Funkmodulen, Signale von A nach B zu schicken. Diese Signale sind: -Der Sender sendet drei Ampel (Rot, Gelb und Grün) zustände an den Empfänger. -Der Sender sendet eine Information ob eine Baustelle vorhanden ist. Wir haben uns über legt Datensätze zu schicken, d.h. insgesamt 4 Datensätze und diese müssen sich halt so unterscheiden dass der PIC erkennt welcher zustand gerade ist. z.B. Sollte die Ampel jetzt auf "Rot" geschalten sein, so muss das Fahrzeug (Modell-Fahrzeug) mit dem Empfänger am Bord sofort stehen bleiben (das gleiche bei Gelb). Sollte aber eine Baustelle auf der Fahrbahn sein, so muss das Fahrzeug langsamer werden. Meine Frage jetzt, wie muss ich das Programmieren und wie schaut die Schaltung dazu aus????? Ich habe nämlich keine ahnung vom Programmieren, nur mit "C" ein wenig!!! Oder ist der Atmel 2313 besser geeignet für meine Funkübertragung?? Wenn genaue Informationen zu unserem Projekt gebraucht werden, nur bescheid sagen!!! Ich bin über jede Hilfe froh!!! Vielen Dank! mfg Walter
>>Meine Frage jetzt, wie muss ich das Programmieren und wie schaut die >>Schaltung dazu aus????? Diese Frage stellt dein Proff an DICH und nicht an den Rest der Welt. >>Ich habe nämlich keine ahnung vom Programmieren, nur mit "C" ein >>wenig!!! Dann lerne es. Das war wohl Ziel deines Proffs. 5.te Klasse und MATURA. Was ist das ? AT ? Ziemlich schwere Aufgaben für ein Kind ;) Holger
@Holger http://de.wikipedia.org/wiki/Matura wenn ich das beim überfliegen des Artikels richtig gesehen hab entspricht das etwa dem deutschen Abitur und die Klassen sind die gleichen was heißt das es sich wirklich um einen 5-Klässler handelt und damit eigendlich ( meines Erachtens ) um eine für ihn so gut wie unlösbare Aufgabe. Annsonsten wäre meine Frage wie das Auto ( -modell ^^ ) gesteuert wird d.h. soll nur die geschwindikeit geregelt werden oder soll auch festgestellt werden ob bei einer Strecke eine Kurve kommt oder ob das Auto noch gerade fährt ? Und zu dem Stehenbleiben soll das dann vor der Baustelle der roten Ampel ervolgen oder einfach sobald die Ampel rot gelb ist ? Gruß Andreas
>@Holger http://de.wikipedia.org/wiki/Matura wenn ich das beim >überfliegen des Artikels richtig gesehen hab entspricht das etwa dem >deutschen Abitur und die Klassen sind die gleichen was heißt das es sich >wirklich um einen 5-Klässler handelt und damit eigendlich ( meines >Erachtens ) um eine für ihn so gut wie unlösbare Aufgabe. Hi Andreas. Das sehe ich auch so. Die Typen aus AT leiden scheinbar an grenzenloser Selbstüberschätzung. Zumindest eine Schaltung und ein kleines Programmiergerüst als Vorgabe müsste doch vorhanden sein. Ansonsten müsste man dem Lehrer die Lizenz entziehen ;) Holger
Es tut mir leid, wenn ich mich nicht genau ausgedrückt habe!! Aber ich meinte die 13. Klasse (HTL - Höhere Technische Lehre), bei uns in Österreich (Wien)!! Das Fahrzeug soll nur geradeaus fahren und wenn die Ampel auf Rot / Gelb geschalten ist so muss das Fahrzeug sofort (vor einer weißen Haltelinie) stehen bleiben. Die Haltelinie erkennt es mit einem Liniensensor, der zwischen hell und dunkel unterscheidet. Und bei der Baustelle nur langsamer werden, d.h. wir haben drei Zustände für den Motor, nämlich normal, langsam und stopp. Die Motorspannungsregler haben wir bereits realisiert. Die geschwindigkeit können wir mit einem Poti regulieren nur müssen wird das jetzt so schaffen, dass der PIC statt unseren Poti arbeitet und diese drei Zustände realisiert. Wie bereits erwähnt haben wir diesen Teil schon fertig uns fehlt nur noch die Funkübertragung. Eigentlich nur noch das Programm für den PIC und leider haben nicht mehr viel Zeit. Die Schaltung werde ich mir selber suchen. Ich Danke im voraus und entschuldige mich für dieses Missverständnis!!! mfg Walter
Ist ja kein Problem wir hatten uns nur etwas gewundert aber an deiner Stelle würde ich erstmal darüber nachdenken was als erstes wahrgenommen werden muss. Denkanstöße : 1. Auto fährt aber noch nich über die Linie, Ampel rot / gelb ---> Auto fährt weiter bis zur Linie 2. Auto fährt über die Linie, Ampel rot ---> Auto hält an der Linie 3. Auto fährt aber noch nich über die Linie, Baustelle da ---> Auto fährt weiter bis zur Linie veringert dann die Geschwindigkeit. 4. Was ist wenn beides eintritt / alle drei ? ( Ampel rot, an linie und Baustelle ? ) 5. Wie merkt das Auto das es an der Baustelle vorbei ist ? 6. Was macht das auto wenn es vor ca 0,5/1/2 sec über die Linie ist und die Ampel geht auf gelb ? Ich würde ( persönlicher Denkansatz ^^ ) zuerst auf die Linie überprüfen lassen, dann wenn das eintritt ( Linie überfahren ) eine Zeit mitlaufen lassen ( Immer nur wenn die Linie überfahren wird also nicht mehrere male also auf messfehler des Sensors achten ). Dann die Ampel dauerabfragen ( wie den Liniensensor ), und dann auf das Signal reagieren, wenn Ampel rot / gelb und Die zeit des Liniensensors bsp unter 1 sec ist ( kommt auf die Geschwindigkeit und die Länge der Freizohne vor der Ampel an sollte eine Baustelle da sein muss die Zeit natürlich an die Geschwindigkeit angepasst werden ). Priorität in der Behandlung hat die Ampel und danach kommt erst die Baustelle. ( Wichtig ist den Timer des Liniensensor auch wieder auf einem deffinierten Wert anzuhalten damit der nicht endlos durchläuft und so falsche Ergebnisse erzeugt ) Gruß Andreas
Angehängte Dateien:
-

Bitmuster.png
160 KB
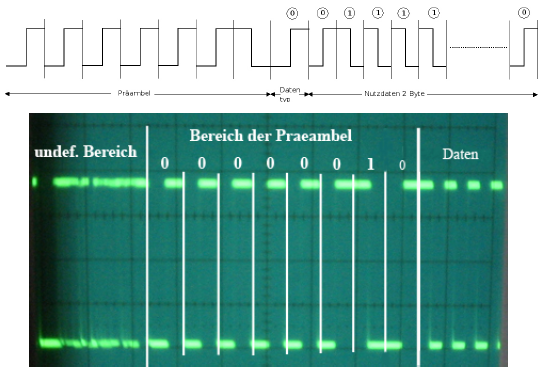
Vielen Dank für deine Antwort!!!! Also um es besser zu verstehen was wir als MATURA-Projekt allgemein haben, möchte ich das Projekt kurz als ganzes erklären!! Unser Projket heißt ATCS (Advanced Thinking Car System) Bestehend aus: a) 1x Ultraschallsensor (Link: conrad.at - Artikel Nummer: 114456 - 62) b) 1x Motorregler (7V/3A) c) 1x Liniensensor (CNY70) d) 1x Schmitt-Trigger (für Ultraschall) e) 1x Ampelsteuerung (siehe http://www.oliver-saal.de/elektronik/ampel.php) f) 2x Funkmodule (siehe ganz oben - ebenfalls Conrad) Nun zum zusammenhang von den einzelnen Komponenten: zu a) Zur Person Erkennung (Playmobil), sollte der Passant die Fahrbahn unerlaubt betreten (z.B. bei Grüner Ampelstellung für die Autos). Priorität: Sehr Hoch. zu b) Der Motorregler kümmert sich um die einzelnen Zustände des Fahrzeuges (die Zustände sind normale-, langsame- und Stopp für die Geschwindigkeit). Priorität: Sehr Hoch. c) Der Liniensensor ist also eines der komplizierten Komponenten. Der Liniensensor müss bei: -Rot / Gelb Ampelstellung: vor der Haltelinie stehen. -Rot / Gelb Ampelstellung: das Fahrzeug ist schon vorbei, einfach weiterfahren. Überquert aber ein Passant die Fahrbahn, muss das Fahrzeug sofort stehenbleiben (d.h. die allerhöchste Priorität hat der Ultraschallsensor) -Rot / Gelb und Baustelle: Ist die Baustelle durch einen Taster aktiviert (z.B. für 5sec und dann wiedere deaktiviert) so muss das Fahrzeug langsamer werden und das Fahrzeug muss vor der Haltelinie stehen bleiben -Rot / Gelb und Baustelle: Ist das Fahrzeug bei roter Ampelstellung und aktivier Baustelle schon über die Haltelinie gelangen, so darf das Fahrzeug weiterfahren, aber nicht zu vergessen PASSANT (sofort stehen bleiben). -Grün und Baustelle: Langsam weiterfahren und sollte ein PASSANT kommen sofort stehen bleiben. Die Idee die der Herr Krämer hatte mit der Liniensensor wäre sicherlich ein sehr gute Lösung nur wie gesagt habe ich leider keine Ahnung vom Programmieren (haben alles schon fertig außer SOFTWARE). d) Der Schmitt-Trigger ist für die Weiterverarbeitung des ankommenden Signals sehr wichtig. Erkennt der Ultraschallsensor ein Hinderniss, bekommen wir am Ausgang eine sehr unstabile Ausgangsspannung heraus und um die Mikrocontroller freundlich zu machen, haben wir den Schmitt-Trigger hinterher geschalten um eine Ausgangsspannung von 0-5V zu erreichen ("1" und "0"). e) Die Ampelsteuerung wird mittels eines Tasters aktiviert und nach dem betätigten so beschalten: Von ROT zu GRÜN (kurze warte Zeit) dann wieder zurück zu ROT (warten auf Taster Betätigung). f) Das Funkmodul wird mit der Ampelverbunden und mit der Baustelle. Jedes dieser Bestandteile bekommen ihr eigenes Bitmuster, d.h.: -1x Bitmuster für ROT -1x Bitmuster für GELB (wie ROT) -1x Bitmuster für GELB -1x Bitmuster für die Baustelle Das Bitmuster könnte so ausschauen: -Siehe Anhang Nun wieder mal meine Frage, wie kann ich solche Bitmuster mit einem Mikrocontoller bzw. einem PIC herstellen. Ich Danke im voraus! Vielen Dank mfg Walter
Ich programmiere leider keine PIC aber normalerweise kannst du dir jederzeit einfach eine Variable ausdenken bspweise in C eine unsigned int Ampel der du die Zustände 0x00 für z.B. grün zuweißt und 0x01 für rot und eine wo der Zustand des Liniensensors ist ( leider weiß ich nicht genau wie der angeschlossen ist usw ) ( das wäre in etwa der code für einen AVR ) Jetzt einfach mehrere if schleifen :
1 | //Includes
|
2 | #....
|
3 | //Variablen deffinieren
|
4 | ....
|
5 | |
6 | void Aktuallisierung( void ); //Steht unten was das ist ^^ |
7 | |
8 | void main (void) |
9 | {
|
10 | while (1)// endlosschleife das Programm macht immer wieder das selbe |
11 | {
|
12 | if ( PINX & (1<<PINXY) ) /*Das Fahrzeug hällt immer wenn der Sensor an PinY des PortsX = 1 ( gemeint ist der Ultraschallsensor )*/ |
13 | {
|
14 | //Motor stopp
|
15 | }
|
16 | |
17 | if (( Ampel )&(Linie)) /*wenn Ampel = 0x01 also rot und der Liniens. = 1 dann wird der Schleifenkörper ausgeführt andernfalls nicht */ |
18 | {
|
19 | //Motor stopp
|
20 | }
|
21 | |
22 | if ( Baustelle ) //für die Baustelle |
23 | {
|
24 | //Motor langsam
|
25 | }
|
26 | |
27 | if (!(( PINX & (1<<PINXY) )&( Ampel )&( Baustelle ))) /* Sind wieder alle Zustände normal ? Andernfalls keine Änderung */ |
28 | {
|
29 | // Motor wieder auf Normal
|
30 | }
|
31 | /* Wichtig die Variablen innerhalb der Endlosschleife aktuallisieren oder Interruptgesteuert */
|
32 | |
33 | Aktuallisierung(); // Dafür würde ich ne eigene Funktion nehmen |
34 | |
35 | }
|
36 | }
|
37 | |
38 | void Aktuallisierung (void) |
39 | {
|
40 | //Abfrage des Ampelzustands
|
41 | Ampel = ...; /* da weiß ich nicht wie das empfangsprotokoll usw ist hab leider auch gerade zeit es nachzuschauen wichtig wäre aber das Ampel grün = 0x00 ist und gelb/rot irgendetwas != 0x00 */ |
42 | Baustelle = ...; /*Ich weiß leider nicht ob das nur ein Pinzustand ist oder ob das auch gesendet wird wenn das nur ein Pinzustand ist dann ebenfalls wie bei dem Fußgängersensor das gleiche gilt für den Liniensensor */ |
43 | Linie = ...; // Steht ja was es ist |
44 | }
|
Noch zu dem Code ich hab gerde gesehen das das mitgesendet wird ob eine baustelle da ist oder nicht da müsstest du mal schauen wie man in C bits maskiert dann kannst du dass alles in einem Byte unterbringen und somit auch ganz einfach verarbeiten oder du machst lauter if schleifen die die zustände abfragen ist aber umständlicher und nicht ganz so flexibel. Gruß Andreas ( Kramer mit a ^^ ) ich hab nur leider gerade keine Zeit mehr aber falls du hilfe brauchst schreib ich heute abend oder halt demnächst wieder ich schau eigendlich oft über solche interessanten Treads.
Ich habe gerade wieder etwas Zeit und wollte nur noch hinzufügen das es natürlich interessant wäre zu wissen wie die Schaltung aussieht da man die Programierung ja an die Schaltung anpasst und nicht umgekehrt. Falls der Sensor nur eine Linie erkennen soll und noch keine Hardware vorhanden ist wäre das z.B. eine relativ einfache Lösung http://www.robotmaker.de/linie.html . Mit ein paar Infos über die restliche hardware wie z.B. beim Ultraschall wäre gut ^^ . Weißt du eigendlich schon welchen µC du nehmen willst und mit welchem Takt oder wie groß die Schaltung werden darf ? Ich hab allerdings gerade oben gelesen dass du eine Vorgabe für einen Pic hast stimmt das weil der Titel des Treads ja noch die möglichkeit offen ließ. Gruß Andreas
Ich danke dir viel mals Andreas (hoffe darf dih so nennen?)!!! Genau diese Schaltung haben wir für den Liniensensor genommen (von der gleichen Seite)!! Ich bin sehr froh das du uns helfen willst (vielleicht unsere letzte Hoffnung). Die Lehrer können bzw. wollen uns nicht helfen, weil es heißt "SELBSTSTÄNDIGE ARBEIT". Aber leider kann keiner in meiner Gruppe programmieren und hab ich Glück, dass du uns hilfst. Danke nochmals!! Als wie gesagt, den Liniensensor haben wir ebenfalls von dieser Seite und er funktioniert. Wir bekommen ein Signal von 0V und 5V. Aber die Schaltung schwankt ein wenig und so hab ich mir gedacht, dass wir den Schmitt-Trigger auch noch verwenden werden. Vielleicht fällt dir noch irgendetwas ein, wenn du wieder Zeit hast ^^? Danke!! mfg Walter (Lastenheft im Dateianhang)
Ich bins wieder!! Nein wir haben keinen PIC vorgegeben, ich habe den nur gewählt, weil ich im Internet gesucht habe und dieser sehr oft vorkam. Aber in der Schule verwenden wir den MicroWilli V1b 8-Bit mit dem Chip "Infineon SAF-C517A-LN"!!! Aber wir können auch andere Mikrocontroller verwenden! Der PIC muss es nicht sein!! mfg Walter
Du kannst mich natürlich so nennen das stört mich überhaupt nicht ^^ ( Ich hoffe ich darf du schreiben ist einfach schneller zu schreiben ). Nochmal zu der Programmierung ich könnte fast den ganzen code in c und für einen Atmel schreiben aber leider kann ich die Funkübertragung nicht ich wei leider nicht wie man die decodieren könnte das man normale bytes überträgt. Ich versuche mich da gerade einzulesen weil mich das eigendlich auch interessiert aber wie ich schon oben geschrieben hab ist der rest relativ einfach und zu dem Schwingen des Liniensensors ist halt die Frage wie stark der schwingt und für wie lange wenn nur 1-2 mal in der sec was falsches kommt ist das im code vernachlässigbar weil der code den motor zwar stoppen würde danach aber sovort ( naja vieleicht 100 takte später ) ihn wieder anschalten würde das merkt man garnicht. Oder man nimmt einfach eine Zählerschleife die z.B. bis 10 zählt wenn der Liniensensor 1 ist und wieder zurückgesetzt wird wenn er nicht 1 ist. Das kommt allerdings auf die Taktquelle und den Sensor an und auch auf die Geschwindigkeit des Modellautos. Du müsstest mal ausrechen wieviel Zeit du hast bis das auto über die Linie drüber ist. Dann weiß man auch wielange die Zählerschleife sein darf wobei das bspweise bei z.B. 16 mhz Takt kein Problem sein dürfte ^^. Da hat man genügend zyklen um auf etwas zu reagieren. Noch eine Frage was hat das Auto für eine Verzögerung beim Halten das wird ja nicht sovort stehen wenn der motr aus ist wie weit fährt es noch oder müsste man z.b. zum bremsen kurz den Motor rückwärts ansteuern ? Nicht das die Passanten überfahren sind bis das Auto mal ausgerollt ist. ( wobei ich denke so wei wird das nicht bei einem Modellauto sein ) Das ist übrigens dann noch wichtig beim Rückstellen des Motors dass der Lineiensensor da keine Rolle mehr spielt weil das Auto ja schon über die Linie sein könnte zumindest mit dem Sensor. Ich lese mich dann jetzt weiter in die Manchestercodierung ein und p.s. die Datenblätter der Funkmodule sind ja sehr umfangreich ^^. Gruß Andreas
Ja da hast du Recht, die Funkmodule sind vom Datenblatt her "sehr gut" ^^! Also wenn man das Fahrzeug fahren lässt und denn Motor vom Akku (7,2V) löst, so bleibt das Fahrzeug sofort stehen. Aber beim Motor gibt es noch ein Problem. Unser Motor braucht im Betrieb min. 3A und diese Ampere lassen den Motor fahren oder stoppen. Unser Motorregler sorgt mittels POTI für die Geschwindigkeit des Motors. d.h. wir müssten es irgendwie schaffen den POTI durch den "Mikrocontroller" zu ersetzten, d.h. der POTI hat in unserer Aufgabe, drei Stellungen: - nicht aufgedreht -> Fahren - halb aufgedreht -> langsamer fahren - voll aufgedreht -> Stopp Nun wäre es unser Ziel die drei Zustände mit dem Mikrocontroller zu schaffen, d.h. irgendwie mit dem POTI einbezogen. Aber wie können wir den POTI automatisch regeln. Oder geht das auch ohne, den POTI zu verwenden. Unsere Kreuzung wird aus einer Spannplatte gebaut und wird 2 Meter lang sein, breit zirka 60-70cm. Die Platte wird mit einer schwarzen Polie beklebt und mit einer weißen reflektierten Folie, für die Haltelinie. Dadurch das die ganze Platte schwarz ist, könnte man den Liniensenor vielleicht er dann aktivieren, wenn die Ampel rot ist und sollte das Fahrzeug jetzt schon über die Haltelinie gelangt sein und die Ampel auf Rot, so wird der Liniensensor keine Linie finden und einfach weiterfahren (unser Ziel). Für unsere Motorreglerschaltung haben wir eine Darlington-Transistor-Scahltung verwendet, mit einem Hochleistungstransistor und danach ein Spannungsteiler der unseren dritten Transistor aktiviert und wir so die Spannung an den Darlington verändern können. Und nochmals, vielen Dank für deine Hilfe, weiß ich echt zu schätzen!!1 mfg Walter
Angehängte Dateien:
-

Motor.JPG
11 KB
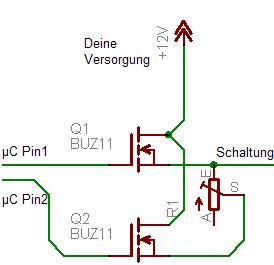
Also erstmal zu deinem Motorproblem : Wie wäre das im Anhang denn ? Ja nicht das Optimimale weil 2 Kontrollerpins benutzt werden aber dann hast du die gleiche Schaltung wie früher nur dass du per µC wählen kannst ob der Strom über das Poti an die Schaltung oder ohne das Poti an die Schaltung oder auch garnicht ^^ geht. ( Wäre aber super wenn da mir noch jemand von den vielen Profis hier sagen könnte ob die Schaltung so gehen würde ). Zu der Schaltung noch die Stromquelle soll dein Akku sein aber ich hab vergessen die 12V in 7,2 zu ändern. Ich muss dann morgen mal weiterschauen nach der Schule ^^ aber ich versuch dort noch etwas über die Funkanbindung nachzudenken. Gruß Andreas
Werde mir mal die Schaltung genauer anschauen! Sieht aber sehr gut aus ^^. Aber ich hätte noch eine Frage: Für was brauchen wir den POTI in der Motorschaltung?? Wegen dem Funk, glaub ich auch das der Manchester Code am besten ist. Aber ich habe ein gutes File gefunden. Kannst es dir mal anschauen. Die Module die sie dort verwenden, sind "fast" die gleichen die wir verwenden und dort wird ebenfalls ATMEL verwendet!! Vielleicht kannst du dir denn Code (der dabei ist) mal anschauen??? LINK: http://www.uni-koblenz.de/~physik/informatik/studienarbeiten/toeppi.pdf Danke dir!! mfg Walter
> Aber beim Motor gibt es noch ein Problem. Unser Motor braucht im Betrieb > min. 3A und diese Ampere lassen den Motor fahren oder stoppen. Unser > Motorregler sorgt mittels POTI für die Geschwindigkeit des Motors. Die Schaltung ist dafür gedacht das Poti weiterhin bestehen zu lassen aber auswählen zu können ob der Motor geregelt ungeregelt oder garnicht läuft. Zu dem Dokument das ist schon sehr interessant und ich bin leider noch nicht fertig mit durchlesen ^^ aber leider kann ich kein assambler womit mir der Code nichts bringt aber wenn es weiterhin so gut erklärt ist kann ich das vieleicht in C nachbauen. Gruß Andreas
Ich werde morgen versuchen deine Motorschaltung aufzubauen und zu schauen ob sie funktioniert??? Die Schaltung von uinserem Motor findest du im Dateianhang!!! mfg Walter
Hab noch eine Frage?? Welche Bauteile sind Q1 und Q2!! Und der POTI in der Schaltung soll unseren darstellen, oder??? mfg Walter
Ich habe mir deine SChaltung angesehen und habe jetzt auch gesehen wie sie funktioniert ^^ man müsste dazu meien Schaltung etwas abändern damit sie mit diesem Spannungsteiler funktioniert. Zu deiner Frage Q1 und Q2 sind Mosfets die den Strom eigendlich ungehindert durchlassen wenn sie voll durchgeschaltet sind. Ich hätte eine Frage zu deiner Schaltung wieviel A fließen über den Spannungsteiler ? Leider bin ich Elektroniker usw nur als Hobby und hatte sowas bis jetzt auch nie in der Schule aber ich bin lernwillig ^^. Sollte der Strom der da Flißt nur gering sein sind diese Mosfets natürlich absolut überdimensioniert. Gruß Andreas
Beim Spannungsteiler fließt ein kleiner Strom (ca. 100mA)!! Also MosFet weg ^^, oder? Wenn du noch irgendetwas brauchst nur sagen!! Wir haben heute alle Schaltungen geätzt und neu gelötet. Jetzt kümmern wir um den Funk und versuchen ein Bitmuster einmal darzustellen. Was wir noch überlegen ist: -Bitmuster über Mikrocontroller -Bitmuster mit Logikschaltungen -Bitmuster mit irgend einer Schaltung Danke!! mfg Walter
Ein Bitmuster zu erzeugen ist mit einem µC eigendlich sehr leicht nur das Problem ist wie man das mit den Funkmodulen macht damit die Reichweite nicht gleich 0 ist. Die mosfets waren eigendlich nur als so eine art SChalter gedacht der halt elektronisch betätigt werden kann. Gruß Andreas
Wenn du die Übertragung selber meinst, so kann ich dir sagen, dass die Übertragung mit den Funkmodulen funktioniert. Wir haben rechteck-Impulse zum Empfänger geschickt und am Oszilloskop anzeigen lassen. Aber der Trick ist, dass der Empfänger am Anfang nur rauschen empfängt und erst wenn am Sender das Signal bis ca. 3V erhöht wird, wird der Empfänger aktiviert und wir bekommen das gleiche Signal am Empfänger zu sehen. Das mit dem Motor muss ich mit meiner Gruppe noch bereden! Ich hoffe ich finde bald eine Lösung! Aber ich habe mir gedacht das wir einen PIC verwenden werden, weil der angeblich leicht mit C zu programmieren ist. Und ich mich in C ein wenig auskenne. Wenn du vielleicht irgendeine Schaltung für einen PIC hättest (wäre eine sehr große HILFE)^^?? Danke nochmals!! mfg Walter
Solltes du und deine gruppe dich doch für einen Atmel Atmega oder ähnlich entscheiden die sind ebenfalls eigendlich sehr leicht in C programierbar und rechts unter Avr befindet sich eine einfache Schaltung ( im normalen tutorial ) und ein Avr C-Tutorial. Wie gesagt ich hab mit Avr angefangen und fand das auch unglaublich einfach und die Datenblätter usw sehr hilfreich und bin einfach dabei geblieben da es auch kostenlose Kompiler und kostengünstige Programmer gibt. Schau dir am besten einmal an der Seite das Tutorial an ich kenn es nur empfehlen. Gruß Andreas
Bitte melde dich an um einen Beitrag zu schreiben. Anmeldung ist kostenlos und dauert nur eine Minute.
Bestehender Account
Schon ein Account bei Google/GoogleMail? Keine Anmeldung erforderlich!
Mit Google-Account einloggen
Mit Google-Account einloggen
Noch kein Account? Hier anmelden.