Hallo ich hab da mal eine Frage vielleicht kann mir ja jemand helfen ich komme aus dem modellbau und will mit hilfe eines MSP´s einige Sonderfunktionen meines Modells auslagern. Mein Problem: Als Eingang soll ein PWM signal eines Empängers dienen, die Pulsweite liegt zwischen 1 und 2 ms. Durch die verschiedenen Werte des einganssignals soll der MSP verschiede Inderrupt programme ausführen. Für die genauigkeit der daten: Empfänger: Graupner smc19 Funktionen: -Beleuchtung -Kanonenschacht ausfahren 2 Stufig 1.Stufe Schacht, 2.Stufe Kanonen -Raketnschacht ausfahren zum Steuern der Rudermaschinen ist ein FT639 im einsatz. Wäre nett wenn jemand darüber etwas weis und mir helfen kann.
Da kannst du mit der Capture-Funktion des Timers die Impulszeit messen und dann entsprechend Aktionen auslösen. Wie man die Capture-Funktion benutzt, steht im User Guide des Chips und eventuell gibts bei TI sogar nen C-Demo schon dazu.
Danke für die Antwort Ich bin neu auf diesem gebiet, kannst du mir vieleich nochweiterhelfen. ich finde nämlich keine Beispielprogramme auf der Texas insstrumens Seite. Und wie ich die Capture Funktion richtig scheibe ist mir auch noch ein rätsel?.
Die Code-Examples sind hier. http://focus.ti.com/mcu/docs/mcuprodcodeexamples.tsp?sectionId=96&tabId=1468 Der User Guide ist hier: http://www.ti.com/litv/pdf/slau049f Direkten Code wird bissl aufwendig jetzt, außerdem lernst du ja dann nix dabei. Schau dir die Beispiele an, und guck im user Guide den Timer A an. Musst halt TACTL Register passend einstellen, Up-Mode, Tacktquelle usw. und im TACCTL0 einstellen, was du machen willst, also CAP für Capture, Flanke auswählen, Capture-Eingang auswählen, Interrupt aktivieren, Sync oder nicht usw. In der ISR müsstest du dann die flanke umschalten, und beim nächsten mal die Zeitdifferenz Messen.
Super Danke. Werd mir das jezt mal genauer anschauen. falls ich nicht zurecht komme darf ich dann auf dich zurückkommen?? auf jeden fall DANKE DANKE DANKE, jetzt wirds vielleicht doch noch was mit meinem Projekt.
Ich werd aus dem zeug einfach nicht so richtig schlau, mein Englisch ist jetzt auch nicht mehr das beste und bin mir einfach noch sehr unsicher. wenn jemand mal einen blick auf mein Programm werfen könnte währe ich ihm sehr dankbar vielleicht schreib ich da einen völligen scheiß zusammen aber ich verstehe hald das datenblatt so.
Angehängte Dateien:
-

schaltplan.jpg
74 KB
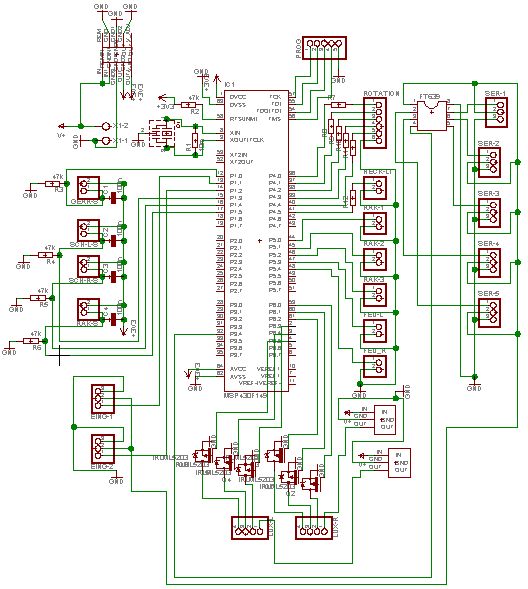
Hier ist noch ein schaltplan von mir leider nur als schlechtes bild wenn einer den Eagle schaltplan braucht kann er gerne haben.
Angehängte Dateien:
-

schaltplan.png
23 KB
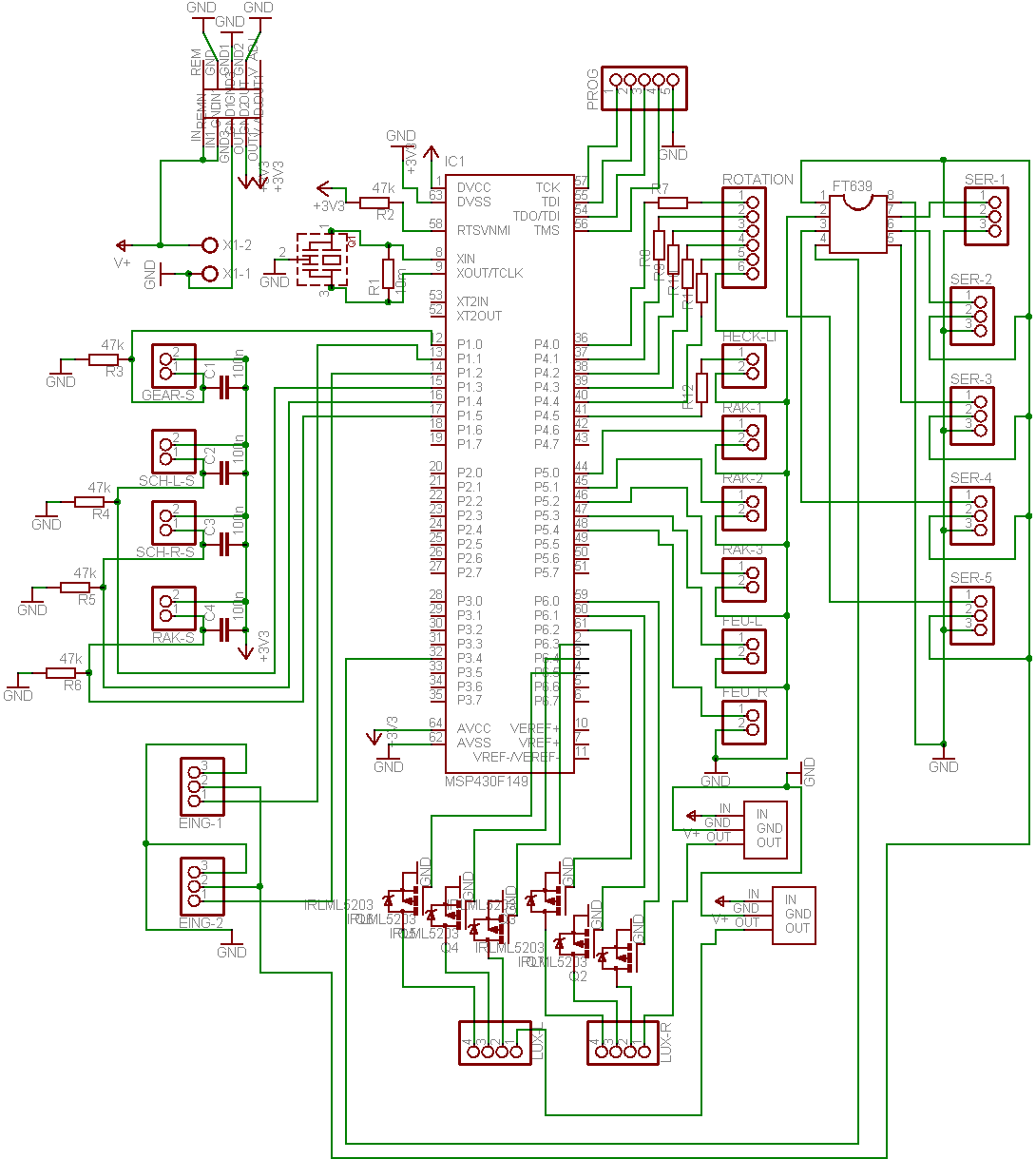
Hallo hier mal ein schöneres Bild vom Schaltplan. es scheit so als hab ich alle sprachlos gemacht mit meinem Code. ihr müsst mir einige fehler verzeien es ist ja mein erstes programm. Für anregungen und verbesserungen bitte melden ich nehme jegliches komentar gerne an!!!.
Naja, man kann aus dem schlimmen Schaltplan leider nicht erkenne, welche Signale du überhaupt capturen willst.... Schreib mal genau, welches Signal, oder welche da PWM sind....
Also die eingänge die ich capturen will sind eingang1 und eingang2 somit pin 1.1 und 1.2. Die Signale die ich empfange sind 20ms lang und haben eine min Pulslänge von 0,8ms und max Pulslänge von 2,2ms. Es reicht mir auch wenn ich einen eingang verwenden kann muss halt dann die abstufung der Pulslängen anders auslegen. Kannst du mir da weiter helfen???. PS: was kann ich am schaltplan besser machen??
Bist du sicher, dass so ein Keramikresonator da überhaupt anschwingt? In welchem Datenblatt hast du gesehen, dass man so einen anschließen kann? Um die Eingämge TA0 und TA1 zu capturen musst du die Register TACCTL0 und TACCTL1 entsprechend dem User-Guide einstellen. Dann setzt du in jedem dieser Register das CCIE Bit, um einen Interrupt ausgelöst zu bekommen. In der Timer A0 ISR kannst du dann was mit dem Wert des TACCR0 machen, in der TimerA1 ISR mit dem TACCR1. In der ISR dann auch die Flanken umschalten, denn du willst ja einmal auf High und einmal auf Low triggern. Das sollte ja als Anhaltspunkt reichen, der Rest steht im User Guide sehr gut beschrieben. Der Schaltplan ist halt sehr zusammen gedrängt, Leitungen unter dem Chip usw.
Der Resonator ist doch ein standard Resonator, und im Datanblatt steht dass man einen Standard Resonator bis 8Mhz anschliesen kann. Ich weis nicht ob der anschwingt wie kann ich denn das Feststellen?? Es mangelt mir an einem Oszi um es zu messen. "Um die Eingämge TA0 und TA1 zu capturen musst du die Register TACCTL0 und TACCTL1 entsprechend dem User-Guide einstellen" genau da liegt mein Problem ich weis trotz User-Guide nicht was ich wie einstellen muss bin anscheinend zu dämlich dazu. Das nächste ist was steht dann in den Registern?? die Zeit von der Steigenden bis zur Fallenden Flanke in 8Bit binär oder was kann ich damit anfangen?. das ich den Capture auf high und low einstellen muss um die Pulslänge zu bekommen leuchtet mir ja gerade noch ein. danke für deine Mühe und den tipp mit dem Schaltplan werd ich bei gelegenheit ändern. Falls du vielleicht nochmal so nett wärst mir zu schreiben wie ich register entsprechend einstelle und mir noch sagst wie ich mit einem 8Mhz quarz die Teiler für die Usat schnittstelle einstelle um eine Baud rate von 2400 zu erreichen, dann küss ich den Boden unter dem du gehst ich weis wirklich nicht weiter, hab mich glaube fürs erste projekt deutlich übernommen. Sorry das ich so rumnerve.
Also baudrate kannst du hier ganz einfach ausrechnen lassen: http://mspgcc.sourceforge.net/baudrate.html Die Register könntest du wie folgt einstellen: Das generelle Timer A Register: TACTL = TACLR + MC_2 + ID_3 + TASSEL_2; Damit läuft der Timer A mit 1 MHz im Continous Mode, also immer durch. Dann das Register für den Capture-Compare Block 0: TACCTL0 = CM_1 + SCS + CCIS_0 + CAP + CCIE; Damit legst du fest, dass es im Capture-Mode läuft (CAP), den Eingang TA0 verwendet (CCIS_0), mit dem takt synchronisiert ist (SCS) und auf die steigende Flanke reagiert (CM_1). Außerdem wird ein Interrupt ausgelöst (CCIE) Das gleiche mit dem Register für den Block 1: TACCTL1 = CM_POS + SCS + CCIS_1 + CAP + CCIE; Da halt jetzt CCIS_1 für TA1 Eingang. So, nun werden bei jeder steigenden Flanke an den TAx Pins zuerst der aktuelle Stand des TAR Zähler-Registers in die TACCR0 bzw 1 kopiert, und dann ein Interrupt ausgelöst. Die Vektoren sind TIMERA0_VECTOR für den CCR0 Block, sowie TIMERA1_VECTOR für den CCR1 Block. Im TimerA1 Vektor sollte man noch nach dem TAIV schauen, ob wirklich der CCR1 jetzt kam, der Vektor ist mehrfach belegt. Das steht aber in den C-Demos. In der entsprechenden ISR musst du nun den Wert des TACCRx Registers in eine Variable speichern und die Flanke umschalten, also TACCTLx entsprechend mit CM_2 beschreiben statt CM_1. Wird die ISR das nächste mal angesprungen kannst du aus dem aktuellen Wert in TACCRx und dem gespeicherten deine Impulslänge berechnen. Sinnvoll ist es vielleicht auch, eine Variable zu machen, in der du eine Information über die eingestellte Flanke speicherst, willst ja nur die High-Phase messen, oder? Dann hast du eine 16-bit Variable, die dir die Impulszeit auf 1µs genau angibt, geht also bis 65,536µs Impulslänge. Noch Fragen? Wie du eine ISR schreibst, findest du in den C-Demos.
Danke du bist genial ich werds jetzt nochmal versuchen und hoffen das ich es schaffe. Danke Danke Danke falls ich noch Fragen habe meld ich mich nochmal.
Hallo zusammen, ich habe auf Basis dieses Beitrag einmal versucht ein PWM-Signal auszuwerten. Grundsätzlich funktioniert es schon. Die Interrupts kommen usw. Nur anscheinend ist meine Art der Signalauswertung irgendwie daneben. ICh möchte die High-Zeit und die Periodendauer ermitteln. Im moment gebe ich danneinfach die High-Zeit auf einem Display aus, aber irgendetwas kann da nicht stimmen, da ich Werte um 20 rum rausbekomme. Ohne weitere Bearbeitung müssten die Werte doch um einiges höher sein denke ich doch. Ich habe auch mal versuchsweise die Periodendauer ausgegeben, aber da kommt noch weniger bei raus. Ich habe hier einmal die Initialisierung vom Cature und die ISR. Wäre klasse, wenn da mal jemand drüber schauen könnte. Ich denke es liegt an dem Kram in der ISR, das da ein logischer Fehler drin ist.
1 | void InitCapture(void) |
2 | {
|
3 | TACTL= TACLR + MC_2 + ID_3 + TASSEL_2; |
4 | |
5 | TACCTL0= CM_1 + SCS + CCIS_0 + CAP + CCIE; |
6 | }/* void InitCapture(void) */ |
7 | |
8 | |
9 | #pragma vector=TIMERA0_VECTOR
|
10 | __interrupt void Timer_A0 (void) |
11 | {
|
12 | if(flanke == 0 && ready == 0) // Wenn erste steigende Flanke kommt |
13 | {
|
14 | rise= TACCR0; // Zählerstand speichern |
15 | periode= rise - start; // Periodenlänge berechnen |
16 | start= rise; // Wert für spätere Weiterverarbeitung |
17 | // zwischenspeichern
|
18 | flanke++; |
19 | TACCTL0 |= CM_2; // auf fallende Flanke umschalten |
20 | }
|
21 | else if(flanke == 1 && ready == 0) |
22 | {
|
23 | fall= TACCR0; // Zählerstand speichern |
24 | high_time= fall - rise; // High-Zeit berechnen |
25 | flanke= 0; |
26 | ready= 1; // Wenn ready 1 ist, dürfen die Werte |
27 | // ausgegeben werden
|
28 | TACCTL0 |= CM_1; // Auf steigende Flanke umschalten |
29 | _BIC_SR_IRQ(LPM0_bits); // Exit LPM0 |
30 | }
|
31 | }/* __interrupt void Timer_A0 (void) */ |
Hallo Marco Ich bin im Moment auch gerade an einem solchen Projekt. Doch bei mir scheint es auch nicht zu funktionieren. Was an deinem Cod jedoch sichelich falsch ist: Du beschreibst das TACCTL0-Register immer nur mit einer Oder-Verknüpfung, d.h. wenn du CM_1 hast und |=CM_2 schreibst hast du danach CM_3! Dann reagiert dein Interrupt auf jede Flanke die kommt. denn 01 |= 10 => 11!!! Da must du erst das CM_1 bzw. CM_2 löschen.
Hallo nochmals Ich habs nun noch mal aufgebaut. Es funktioniert wunderbar. Du musst jedoch bei der Initialisierung CM_3 anwählen (beide Flanken). Im Interrupt musst du die Flanken dann nicht mehr ändern, da du ja mit dem If-then-else sowiso die flanke abfrägst. So wird deine Interruptrutiene auch kürzer.
Hallo, ich habe mal wieder etwas Zeit gefunden mit mit den Sachen zu beschäftigen. Ich habe da nun einmal so geändert, dass ich zunächst CM_1 bzw. CM_2 lösche und dann eben das entsprechende andere Bit setze. Das scheint auch schon mal besser zu funktionieren als da andere. Nun noch eine Verständnisfrage. Mein PWM-Signal hat eine Periodendauer von 64µs. Timer A läuft mit 1 MHz im Continous Mode. Wenn ich das Programm nun laufen lasse und z.B. 51 erhalte (fall-rise) ist das dann schon die HIGHT-Time in µs? Da der Timer mit 1MHz läuft, sollte das doch der Fall sein oder bin ich da auf dem Holzweg? Vielen Dank erst einmal für die Hilfe. Gruß Marco
Bitte melde dich an um einen Beitrag zu schreiben. Anmeldung ist kostenlos und dauert nur eine Minute.
Bestehender Account
Schon ein Account bei Google/GoogleMail? Keine Anmeldung erforderlich!
Mit Google-Account einloggen
Mit Google-Account einloggen
Noch kein Account? Hier anmelden.