Hallo TIM
Euer Roboter-Projekt ist eine interessante Sache; die Zukunft gehört
den Robotern...
Wenn die Sensoren besser werden (teilweise sind sie es schon) und die
Software die Roboter flexibel reagieren lässt und diese dann auch noch
lernfähig sind, werden vermutlich viele Arbeitsplätze wegfallen, aber
auch neue und vielleicht bessere entstehen.
Es gibt mehrere Arten von Schrittmotoren: unipolare und bipolare und
noch einige andere von geringerer Bedeutung.
Die unipolaren Schrittmotoren haben 5 oder 6 Anschlüsse und innen zwei
Statorwicklungen mit je einer Mittelanzapfung; wenn die
Mittelanzapfungen intern schon zusammengelegt sind, dann sind es außen
nur 5 Kabel, sonst 6 Kabel. Bei 6 Kabeln sind die Mittelanzapfungen
manchmal von gleicher Farbe.
Die bipolaren Schrittmotoren haben nur 4 Anschlüsse (Kabel) und haben
auch 2 Wicklungen ohne Mittelanzapfungen. Diese sind nur mit speziellen
und meist teuren Chips anzusteuern (integrierte
Transistor-Gegentaktschaltungen). Von dem Einsatz dieser Motoren würde
ich daher abraten (ich habe noch nie einen bipolaren Schrittmotor zum
Laufen gebracht - trotz Einsatz einer selbstgelöteten
Treiberschaltung...)
Die unipolaren Motoren sind einfach anzusteuern - z.B. mittels eines
Relais- oder Lampen- Treibers wie dem ULN 2003 oder ULN 2803 etc., die
man allerdings auch kaufen muß. Diese kosten bei Kessler-Elektronik
z.B. aber unter einem Euro / Teil.
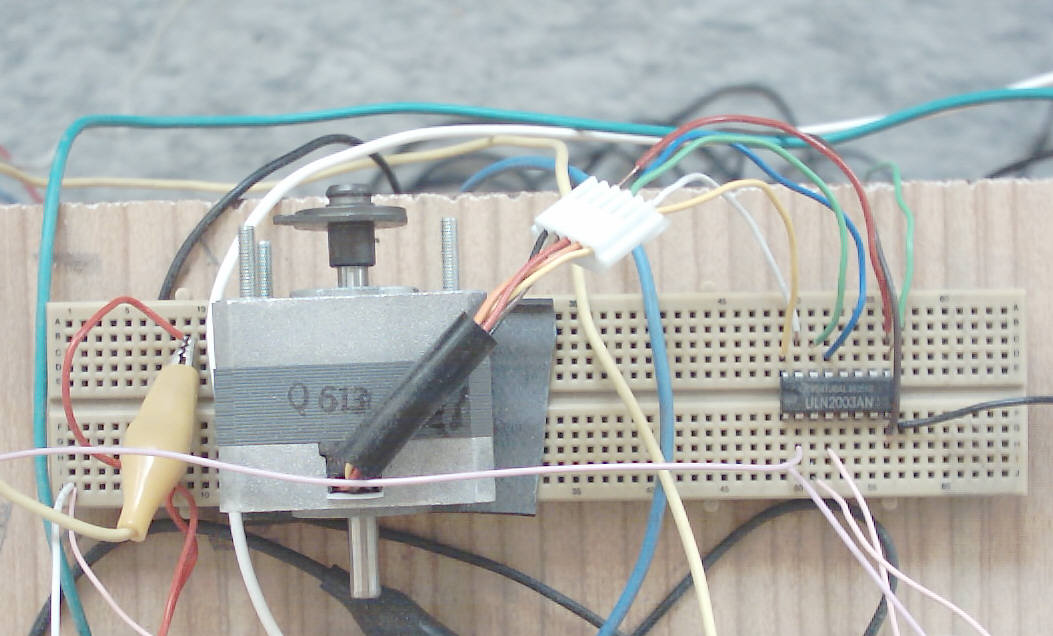
Ich habe ein Foto angehängt, auf dem man einen Schrittmotor
AEG/unipolar (Restposten von Conrad-Elektronik) sieht, der von einem
Leitungstreiber ULN 2003 angesteuert wird. Dieser Chip schafft maximal
500 mA und kann mit seinen Eingängen direkt an einen Mikrocontroller
angeschlossen werden.
Es ist sinnvoll, den Ohmschen Widerstand der Wicklungen des
Schrittmotors zu messen und dabei auch festzustellen, wo die
Mittelanzapfungen der Wicklungen sind.
Die Betriebsspannung des Schrittmotors liegt so zwischen 5 und 12 Volt,
die dann am Treiber-Chip anliegt (beim ULN 2003 an Anschluß rechts oben
auf dem
Foto, Masse ist rechts unten). Der Strom, der fließen kann, sollte den
zulässigen Strom des Treiber-Chips nicht überschreiten bzw. man muß
dann den Treiber-Chip kühlen. Maximaler Strom = Betriebsspannung durch
Wicklungshälfte-Widerstand).
An den Treiber-Chip-Eingängen liegt ein Impuls-Schema (vier Eingänge
sind es ja), das vom ersten zum achten oder umgekehrt
verschoben/rotiert wird). Dazu braucht man die Impuls-Folge, die den
Motor tatsächlich zum Laufen bringt. Die Impulsfolge kann dann so
aussehen.
00010010
00001001
10000100
01000010
00100001
10010000
01001000
00100100
00010010 etc.
(Dazu würde im Prinzip auch ein Ringschieberegister ausreichen).
Zwischen jedem Impulsschema liegt eine Pause, die die Geschwindigkeit
des Schrittmotors bestimmt.
Was man ausprobieren muß, ist, welches Impulsschema am günstigsten ist
und welche für Linksdrehung bzw. Rechtsdrehung gut ist und ob es
überhaupt nötig ist, die Impulsverschiebung rechts für Rechtslauf und
links für Linkslauf zu programmieren (mittels Rotationsbefehlen); es
ist nicht immer nötig (nach meiner Erfahrung reicht es u.U. auch aus,
nur das Impulsschema zu wechseln.
Das untere Nibble kann man dann ausmaskieren und an vier Portausgänge
des Mikrocontrollers legen, an denen die vier Treibereingänge liegen.
Man könnte fragen, wozu sind 8 Bit nötig, um 4 Wicklungshälften
anzusteuern? Nach meiner Erfahrung ist es nötig, vielleicht gibt es
auch Ausnahmen. D.h. die Impulsabfolge ist mit 4 Bit nicht zu
realisieren. Das spielt aber keine Rolle, denn wer arbeitet noch mit
4-Bit-Prozessoren? Ein 8bit-Speicherplatz muß für das zu rotierende
Impulsschema reserviert werden...
Zu meiner Person: ich habe mal Elektrotechnik studiert, aber
abgebrochen; ich bin von Beruf Werkstoffprüfer, Elektronik ist aber
mein Hobby geblieben als auch u.a. Hardwareprogrammierung.
Angehängte Dateien:
-

stepper1.jpg
99 KB
>Die bipolaren Schrittmotoren haben nur 4 Anschlüsse (Kabel) und haben >auch 2 Wicklungen ohne Mittelanzapfungen. Diese sind nur mit >speziellen und meist teuren Chips anzusteuern (integrierte >Transistor-Gegentaktschaltungen). Von dem Einsatz dieser Motoren >würde ich daher abraten (ich habe noch nie einen bipolaren >Schrittmotor zum Laufen gebracht - trotz Einsatz einer >selbstgelöteten Treiberschaltung...) Das zuvor Geschriebene sind Gerüchte, denen ich in allen Punkten widersprechen muß ! Unipolare Schrittmotoren sind so 'schlapp', daß es sich m. E. nicht lohnt, diese einzusetzen.
nun ja, kommt drauf an, wofür man es benutzt, ob das Verhältnis Grösse_Gewicht/Leistung entscheidend ist. Wenn ja - auf jeden Fall bipolar (die Erklärung ist auch einfach: es kann immer die gesamte Wicklung zur Drehmomenterzeugung genutzt werden, bei unipolaren nur die Hälfte). Der Unipolare ist tatsächlich einfacher anzusteuern, aber auch beim biploaren ist das kein Problem. @Thomas: wenn du den nicht zum Laufen bringst, heisst das doch nicht, dass das Motorprinzip schlecht ist:-)
Lassen sich bipolare auch unipolar ansteuern, um die Leistung zu erhöhen? Dann könnte man sich erstmal bipolare Motoren besorgen und beides ausprobieren. Sabine
Hallo Leute Ich habe Eure Antworten gelesen und muß zugeben, daß ich keine detaillierten Kenntnisse über Schrittmotoren habe. Ich habe mich im Internet informiert und gebe diese Informationen jetzt weiter; in den Industrie-Datenblättern ist zu sehen, daß heutige Schrittmotoren sowohl bipolar als auch unipolar betrieben werden können. Daneben gibt es noch Hybridmotoren etc.
Entschuldigung Leute, das war wohl eben die falsche Datei gewesen! Die ist doch wohl die interessantere...
Noch ein Nachtrag von mir: Die Homepage der obigen Seite, die man laden sollte, ist: www.mitglied.lycos.de/Autoelektrik Auf dieser Seite auf -> Gleichstrom-Motoren klicken und dann -> Schrittmotoren auf dieser Seite sind Fotos abgebildet sowie ein interessanter Link! Diese Seite ist nicht von mir!
Hallo Sabine Bipolare Schrittmotoren lassen sich nicht als unipolare betreiben, weil die Mittelanzapfungen bzw.zwei Spulen fehlen! Umgekehrt wohl schon... Die Industrie bietet welche an, die sowohl bipolar als auch unipolar betrieben werden können. Diese sind aber vermutlich auch relativ teuer.
Ja, so meinte ich es auch, uni- als bipolare. Aber bis ich mit Motoren befasse, dauert es noch etwas, habe mir jetzt erstmal ein AVR Butterfly bestellt, um mich erstmal mit AVRs vertraut zu machen. Sabine
Hab ne gute Beschreibung von Schrittmotoren und Ansteuerung gefunden, sogar mit Schaltplänen: http://www.roboternetz.de/schrittmotoren.html
Angehängte Dateien:
-

Generator_aufnahmen_136.jpg
580 KB
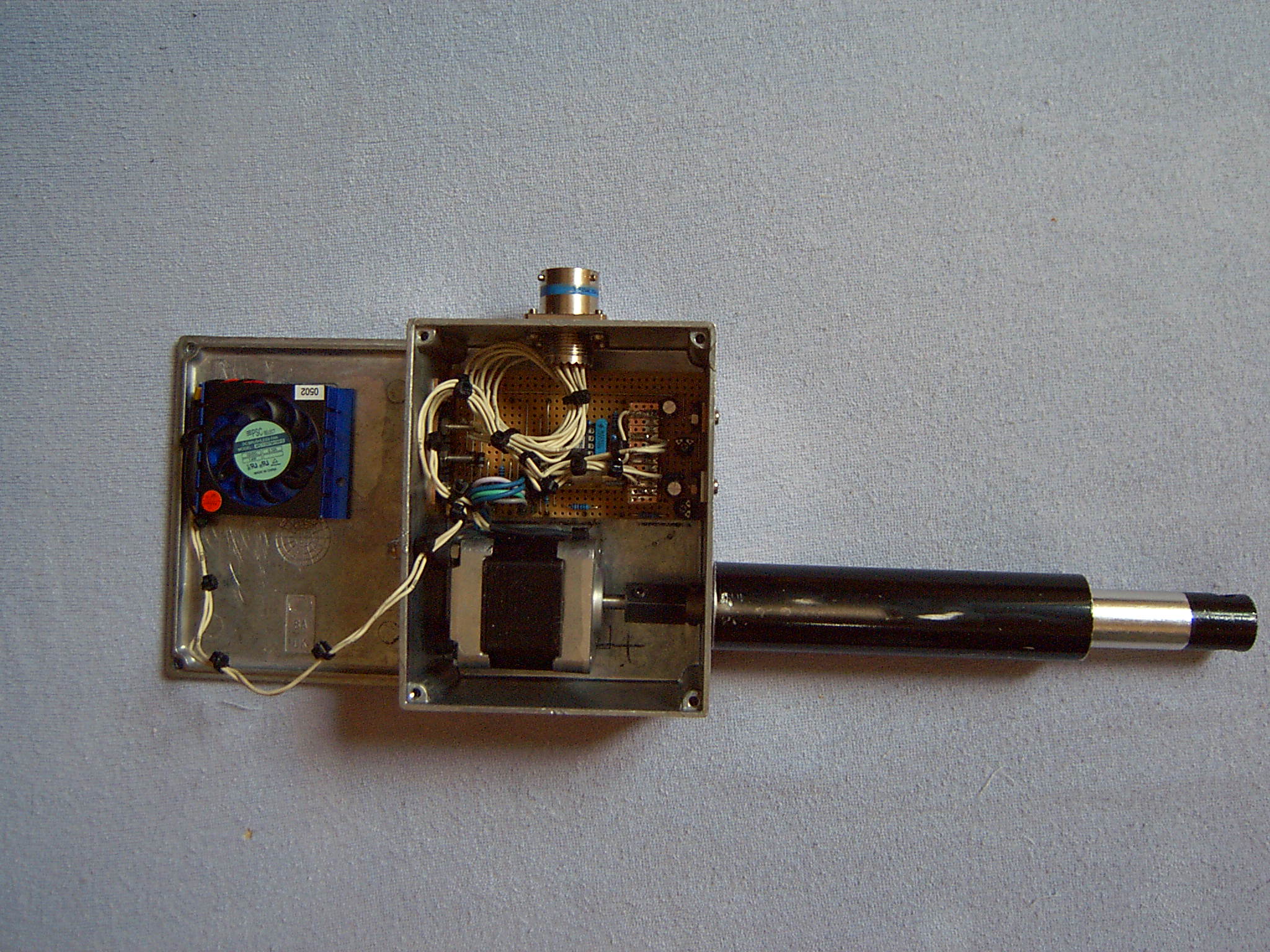
Hey Leute habe hier einen Schrittmotor verwendet um ein Spinelantrieb zu verschieben, damit möchte ich die Drehzahl eines Diesels regeln, der Elektrozylinder verändert die Einspritzmänge an der Kraftstoffpumpe. Die Phasen werden mit MOSFET Transistoren angesteuert, der Motor ist Unipolar verschaltet und wird durch einen Mikrocontroller welcher eigens von mir Programmiert wurde angesteuert. Der 8 Beinige Controller ist so Programmiert das er die Tempertur des Schrittmotor erfasst und diesen bei überhitzung kühlt. Die Netzspannung wird nebenbei ermittelt um den Phasenstrom zu regeln das ist wichtig damit der Spindelantrieb das Pumpengestänge im fehlerfalle nicht zerstört. Die geswindigkeit regelt sich nach der Soll Istwert abweichung. Es kann ein Datenausgleich erfolgen, damit ist der Servo für Diagnosezwecke einfach mit der Serien Schnittstelle des PC zu verbinden. Für Dummschwaller der Controller kann an einem Port mehrere funktionen annehmen wie erfassen von anaogen Werten, ausgeben von analogen und erfassen von Digtalen, ermitteln von Freqenzen usw. Das Projet hat mir sehr viel Spaß gemacht und ich habe viel dazugelert natürlch hat nicht alles auf anhieb funktioniert aber man muss eben dranbleiben um maximales zu erreichen. Bei interesse: habe alles Dokumentiert Meine Email. Christophberninger@gmx.de wenn ihr anregungen haben solltet.
Bitte melde dich an um einen Beitrag zu schreiben. Anmeldung ist kostenlos und dauert nur eine Minute.
Bestehender Account
Schon ein Account bei Google/GoogleMail? Keine Anmeldung erforderlich!
Mit Google-Account einloggen
Mit Google-Account einloggen
Noch kein Account? Hier anmelden.