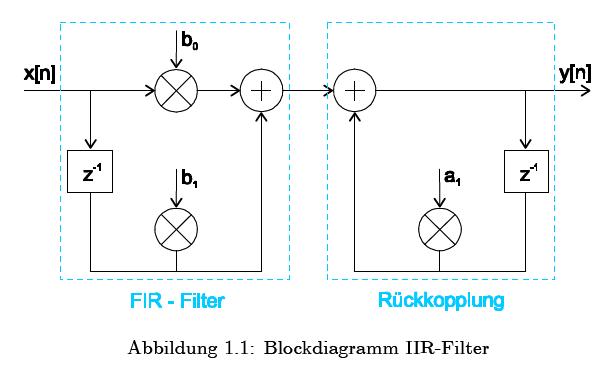
Hallo, will einen IIR Filter programmieren und eventuell später einmal auf einem Controller/DSP realisieren. Bei dem Filter soll es sich um einen Tiefpassfilter handeln, der mir alle Frequenzen von 0 bis ca. 50HZ "durchlässt" und alles über 50Hz stark dämpft. Um einen scharfen Knick hinzubekommen dachte ich an eine Art Tschebyscheff Filter. Auf der Suche nach einem geeigneten Algorithmus bin ich auf dieses tolle Forum gestossen. Insbesondere auf dieses Topic Beitrag "IIR Filter mit Matlab" Dort wird folgender Algorithmus vorgestellt: double z1=0.0,z2=0.0,r,y; double x[]={45., 49. ,51., 45.}; double b0=0.25,b1=0.5,b2=0.25; double a1= -1.88859 , a2=0.894476; int k; z1=0;z2=0; for(k=0;k<4;k++) { r=a1*z1+a2*z2; y=b0*(x[k]-r)+b1*z1+b2*z2; z2=z1; z1=x[k]-r; printf("%f \n",y); } Kann aber die Formel nicht ganz nachvollziehen y=b0*(x[k]-r)+b1*z1+b2*z2; Laut Blockschaltbild (Anhang) müsste sie doch eigentlich anders aussehen?? Wurde für die Berechnung ein anderes Blockschaltbild verwendet? Wenn ja, wann muss man welches verwenden? MFG
Angehängte Dateien:
-

IIR.JPG
26 KB
bitte nicht erschlagen bin noch nicht ganz wach :) das block-diagramm darf IMHO auch wirklich nur als solches verstanden werden... nach dem FIR filter müsste folgende folge rauskommen: y'=x[n]*b0+x[n-1]*b1 und nach der rückkopplung: y=y'[n]+y'[n-1]*a1 ich find das so irgendwie übersichtlicher.. der source beschreibt wenns nach mir geht ein anders verhalten... 73
Angehängte Dateien:
-

IIR.JPG
13 KB
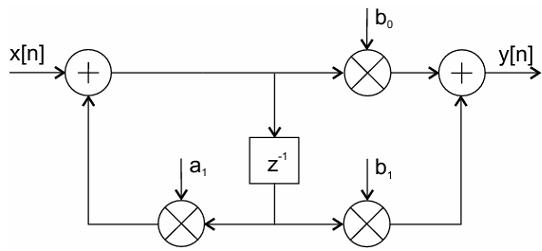
Hi Hans, bin genau Deiner Meinung. Ich habe als Formel: y(n) = x(n) * b0 + x(n-1) * b1 + y(n-1) * a1 Durch geschicktes Umstellen kann man dann noch ein Verzögerungsglied einsparen (Anhang) Kann es denn überhaupt verschiedene Formeln geben, die Charakteristik eines Filters wird doch einzig und alleine durch die Dimensionierung der Parameter a1 bis an und b0 bis bm beschrieben. Ich stelle mir das so vor, dass der Algorithmus (Blockschaltbild) immer gleich bleiben muss und lediglich die Koeffizienten geändert werden müssen je nachdem welche Frequenzen man haben möchte MFG
Für eine gegebene Differenzengleichung gibt es einige Implementationsmöglichkeiten, zwei hatte Christian ja schon gezeigt. Der Algorithmus berechnet die 2. kanonische Form entsprechend der zweiten geposteten Filterstruktur, allerdings 2. Ordnung, dargestellt ist ein Filter 1. Ordnung. Stichworte sind da 'IIR' 'Direktform' (direkte Impelementation anhand der Differenzengleichung) oder 'kanonische Form' (minimale Anzahl der Speicher). Google oder http://de.wikipedia.org/wiki/Filter_mit_unendlicher_Impulsantwort oder Arild Lacroix: 'Digitale Filter', Oldenbourg Verlag, sagt da mehr. Cheers Detlef
Hallo Detlef_a danke für den interessanten Link. Ähnliches hatte ich eben im Netz gefunden und einen Kaskadierte IIR-Filter 2. Ordnung (SOS) in C programmiert. Das erscheint mir alles nicht schwer. Mein Plan war nun mit folgendem Link: http://www.dsptutor.freeuk.com/IIRFilterDesign/IIRFilterDesign.html mir die Koeffizienten ausrechnen zu lassen und mein Prog damit zu füttern. So wie ich das auf Wiki. verstehe, muss ich die Koeffizienten aber erst umrechnen damit ich sie für den kaskadierten Filter nutzen kann, stimmt das so? Sorry, hatte bisher mit Regelungstechnik nicht viel am Hut. Wie schon erwähnt habe ich einen kaskadierten IIR-Filter 2. Ordnung (SOS) bereits programmiert. Gibt es noch eine Möglichkeit das Prog unkompliziert zu testen? Ich bräuchte einfach nur ein paar Zahlenwerte für die Koeffizienten und für den Eingang und könnte dann meine Ausgangswerte vergleichen. Das wäre denke die einfachste Möglichkeit. MFG
>>So wie ich das auf Wiki. verstehe, muss ich die Koeffizienten aber erst >>umrechnen damit ich sie für den kaskadierten Filter nutzen kann, stimmt >>das so? Welche Ordnung hat das Filter denn, das Du implementieren willst? Falls es zweiter Ordnung ist braucht man für nen SOS nichts umzurechnen. Die Filterübertragungsfkt. sind gebrochen rationale Polynome. Nen SOS realisiert Ordnung 2 im Zähler/Nenner. Falls Deine Übertragungsfkt. Polynome höherer Ordnung im Zähler/Nenner hat, muß Du sie in Polynome 2. Ordnung zerlegen. Den Test machst Du so, wie in dem von Dir zitierten thread beschrieben: Impulsantwort per Hand oder mit Matlab/octave ausrechnen, dann kucken ob C dasgleiche rauskriegt. Der Code in dem thread funktioniert für 2. Ordnung auch super, der is nämlich von mir ;) . Cheers Detlef
Hi Detlef_a
Vielen Dank Du hast mir schon sehr geholfen.
Die Ordnung meines Filters steht ehrlich geagt nicht fest. Ich wollte
eben ein wenig experimentieren und später dann anhand der Ergebnisse und
Rechenzeit abwägen für welche Ordnung ich mich entscheide.
Dein Code funktioniert in der Tat super, haben ihn eben mal getestet.
Die Methode mit dem z finde ich sehr elegant :)
Erst mal Zu dem Code, den kann ich ja bestimmt mit dem Kuhschwanzprinzip
um x-Ordnungen erweitern.
Stelle mir das so vor: (4. Ordnung)
int k;
z1=0;z2=0;z3=0;z4=0;
for(k=0;k<n_Eingangswerte;k++)
{
r=a1*z1+a2*z2+a3*z3+a4*z4;
y=b0*(x[k]-r)+b1*z1+b2*z2+b3*z3+b4*z4;
z4=z3;
z3=z2;
z2=z1;
z1=x[k]-r;
printf("%f \n",y);
}
Aber wie kann ich mir die Koeffizienten der Ordnungen >2 für diese
Methode (Blockschaltbild) ausrechnen lassen?
Matlab hätte ich zur Verfügung, kann auch bisschen programmieren aber
mit den ganzen Filterbefehlen blicke ich nicht durch :(
MFG
Achso, noch ein kleiner Zusatz. Dein Code beschreibt ja die Direct-Form 2 (DF2). Diesen kann ich ja relativ einfach erweitern und meine Koeffizienten im Applet ausrechnen lassen und es sollte funktionieren. Bei höheren Ordnungen soll man ja aufgrund der Stabilität auf den Kaskadierte IIR-Filter zurückgreifen, der quasi immer Filter 2. Ordnung hintereinander schaltet. Dort muss ich die Koeffizienten dann umrechnen. Hast Du da vielleicht ein Matlab Beispiel, das wäre hilfreich. Ab welcher Ordnung ist es denn besser den Kaskadierten Filter zu benutzen? Eigentlich kann ich den doch immer nehmen? MFG
Christian wrote: > Ab welcher Ordnung ist es denn besser den Kaskadierten Filter zu > benutzen? > Eigentlich kann ich den doch immer nehmen? > Ja, kaskadierte Filter 2.Ordnung geht immer. Ist aber eher relevant für fixed point Berechnung, in float kannst Du auch höhere Ordnung direkt rechnen. > Dort muss ich die Koeffizienten dann umrechnen. > Hast Du da vielleicht ein Matlab Beispiel, das wäre hilfreich. > Nullstellenbestimmung eines Zähler/Nennerpolynoms, dann zwei Nullstellen/Polstellen zusammenfassen zum Polynom 2. Ordnung. Wenn konjugiert komplexe Nullstellen/Pole rauskommen, immer die kombinieren, sonst gibts keine reellen Koeffizienten. Zaehlerpolynom= [1 2 3 4 5]; Nennerpolynom=[6 7 8 9 10]; rz=roots(Zaehlerpolynom); rn=roots(Nennerpolynom); zaehler_kaskade1=poly([rz(1) rz(2)]) nenner_kaskade1 =poly([rn(1) rn(2)]) zaehler_kaskade2=poly([rz(3) rz(4)]) nenner_kaskade2 =poly([rn(3) rn(4)]) Cheers Detlef Ach so, ersten post nicht gesehen: >Die Methode mit dem z finde ich sehr elegant Naja, das ist eher anschaulich. Im wahren Signalverarbeiterleben kopiert man die Inhalte der z nicht um, sondern läßt nen wrappenden pointer über nen array laufen. In der Regel sind die b's ja auch symmetrisch, das nutzt der Code nicht aus.
Hi, mein Prog. ist soweit fertig. Alles funktioniert mit theoretischen Teststreams. Sobald ich Zeit habe werde ich mal einen Testaufbau machen und reale Werte mit nem Oszi aufnehmen und in meinem Prog. verarbeiten. Irgendwann würde ich dann noch gerne einen passenden Controller oder DSP (abhängig von den ersten praktischen Tests) auswählen wollen der dann alles vollständig übernehmen soll. Kennt einer ne gute Seite wo man ne Art Vergleichstabelle von Controllern/DSPs hat. Hatte mal ne Seite gefunden wo man sich die Parameter des persönlichen Traumcontrollers zusammenstellen konnte und der spuckte dann den passenden Typ heraus. Leider habe ich den Link nicht mehr :( Eine Frage noch. Wie bereits erwähnt habe ich mir meine Filterkoeffizienten per Software ausspucken lassen. Die befinden sich in utopischen Größenordnungen wie 4.03335632290*10^-9. Wie wird sowas verarbeitet. Stelle mir die Multiplikation solcher Werte eher langsam vor. Bedarf es für diese Anwendung vielleicht sogar auf jeden Fall einen DSP der dafür ausgelegt ist?? MFG
Bei VisualDSP++ gibt es eine Funktion die IIR Filter für mehrere Ordnungen realiesiert. In Sektionen zu je 2.Ordnung: Beitrag "IIR Filter mit Matlab" Ich habe folgendes im Internet gefunden (S.4): http://users.etech.haw-hamburg.de/users/ITLabor/DV_Lab_R885/Laboraufgaben_Labtasks/DVP_I6/LAB_IIR_de.pdf Matlab rechnet z.B. in Gleitkommazahlen. Für die Koeffizienten sollte man bei der Genauigkeit im Breich von float ode besser double bleiben. Also runden. Würdest du die Koeffizienten nicht genau angeben, könnte es sein das du damit ausserhalb des Einheitskreises kommst. Dann ist der Filter instabil. Der DSP kann ja nur diskret Werte im Einheitskreis ablegen. Geeignet sind ADSP-BF5xx Reihe so wie ich das rausgelesen habe. PS: Ja, ich weiß der threat ist uralt.
Kann man die koeffizienten auch von einem DSP berechnen lassen. Also ein variabler Tiefpassfilter ist in meinem Sinn. Geht das, oder zu aufwendig?
Beitrag #5095930 wurde vom Autor gelöscht.
Bitte melde dich an um einen Beitrag zu schreiben. Anmeldung ist kostenlos und dauert nur eine Minute.
Bestehender Account
Schon ein Account bei Google/GoogleMail? Keine Anmeldung erforderlich!
Mit Google-Account einloggen
Mit Google-Account einloggen
Noch kein Account? Hier anmelden.