Hallo, ich möchte mit einem N-Kanal MOSFET ein PWM-Signal verstärken. Das PWM-Signal hat eine Frequenz von 97kHz. Gesteuert werden sollen Pumpen und Lüfter mit 24V und ca. 30W. Mein Problem ist, immer wenn der Transistor sperren soll, fängt er an zu schwingen. Habe schon verschiedene Gatewiderstände probiert um die Flanken flacher zu machen, aber ohne Änderung. Habe probehalber mal einen 1uF Widerstand parallel zu Gate und Source gehangen, dan hat er nicht mehr geschwungen, aber trotzdem nicht richtig gesperrt, denn im Sperrfall sollen die 24V am Transistor abfallen, es fallen aber nur ca. 2V an Drain und Source ab. Wenn ich einen rein ohmschen Widerstand als Last dran hänge schaltet der Transistor einwandfrei, nur bei Induktiver Last schwingt er und sperrt nicht richtig. Habe mal meine Schaltung angehängt. Hatte anfangs noch eine Spule und Kondensatoren zur Glättung der PWM-Spannung drin, habe sie aber rausgenommen, damit nichts drin ist was schwingen kann. Aber es gab keine Änderung. Der MOSFET wird über einen MOSFET-Treiber gesteuert. Hat jemand eine Idee was falsch ist?
Angehängte Dateien:
-

Spannung_am_MOSFET.jpg
43 KB
Angehängte Dateien:
-

Spannung_am_MOSFET.jpg
43 KB

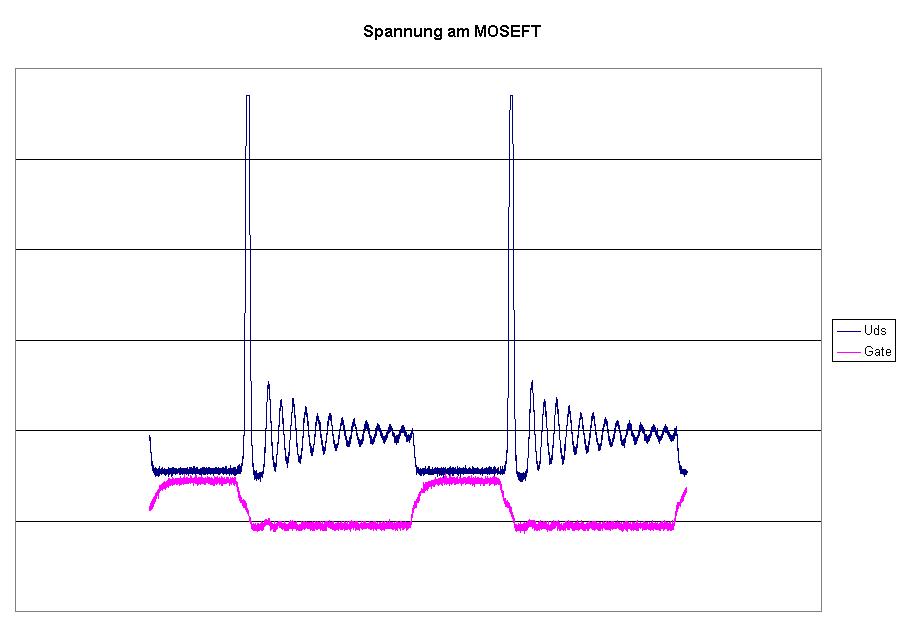
Habe noch das Oszilloskopbild angehängt, einmal die Spannung am Gate und die Spannung von Drain nach Source, die eigentlich auch ein Rechteck sein sollte. Die Gatespannung hat Logikpegel, also von 0 bis 5V.
Angehängte Dateien:
-

PWM-Verstaerkung.jpg
31 KB
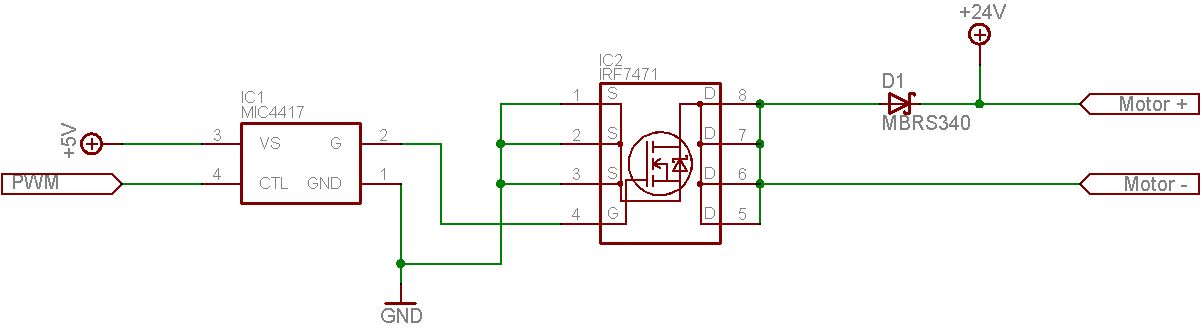
Ups, habe gerade gemerkt, statt der Schaltung habe ich zweimal den Spannungsverlauf angehängt, hier noch die Schaltung.
Versuch es doch mal mit einem R-C Snubber zwischen Drain und Source. Bricht vielleicht deine Versorgungsspannung für den Treiber beim Abschalten soweit ein, dass dieser nicht mehr sauber auf LOW geht? Spendier dem Treiber mal einen 1uF Elko an seinen Versorgungspins.
Hatte am Treiber an den 5V wie am Transistor an den 24V jeweils einen 10nF und einen 1uF parallel zur Glättung der Versorgungsspannungs, hatte sie sicherheitshalber mal rausgenommen, um alles schwingfähige rauszuhaben, aber es war keine Änderung. Was ist ein RC-Snubber?
Das ist doch ganz normal: Motor L + Drain-Source C ergeben einen Schwingkreis. Daher auch der Peak beim Abschalten und danach dann das Ausschwingen.
Schwingkreis ja - aber mit > 1MHz? Allerdings ist aus dem Bild oben leider nicht ersichtlich, wie hoch die Spannungen sind. Evtl. mal kontrollieren, ob die Diode funktioniert.
So wie der hohe Peak beim Abschalten aussieht, hast Du keine Diode parallel zur Last. Dafür brauchst Du eine schnelle, am besten Schottky-Diode.
Andreas: Woher siehst Du, dass hier um >1MHz geht? Habe ich was versehen? Karoly
Ohne jetzt den IRF zu kennen würde ich zwischen Drain und Source /GND eine schnelle Freilaufdiode setzen und einen Pull-Down ans Gate (mit 10k würde ich mal anfangen, messen und kleiner werden)
Oooh, ich sehe schon! Vergiss meine Frage! Danke, Karoly
Danke für die ganzen Antworten. Also die Diode geht noch, hatte ich auch schon dran gedacht, außerdem geht es ja bei rein ohmscher Last. Ja, die Schwingungen sind mit ca. 1MHz. Zu den Spannungen, das Gatesignal hat wie gesagt 5V, der starke Peak beim Abschalten ca. 40V und der Mittelwert der Schwinung ist ca. 3V. Parallel zu Drain nach Source ist schon eine Freilaufdiode drin, sie ist direkt im Gehäuse des MOSFETs. Parallel zur Last ist die eingezeichnete Schottky Diode. Das mit dem Pulldown hatte ich schon mal 1k probiert, werde es aber nochmal mit 10k probieren.
Jetzt mal ganz dumm gefragt: Wie können 40V zustande kommen, wenn eine Diode die Spannungen in Richtung 24V ableitet ? Entweder hast du also einen Fehler im Aufbau, oder der Aufbau ist HF mäßig eine Katastrophe (Leitungsindukivitäten könnten die 1MHz Schwingungen eventuell auch erklären)
Ja, das kann sein. Den Aufbau überprüfe ich gerade noch einmal. Ich habe ein Platine geätz auf der das ganze aufgebaut, hatte vorher allerdings alles mal auf Lochraster aufgebaut, auf der ich nun auch wieder am rumprobieren bin. Also eher eine freiluftverdrahtung und HF-mäßig bestimmt nicht gut.
Angehängte Dateien:
-

PWM-Verstaerkung2.jpg
36 KB
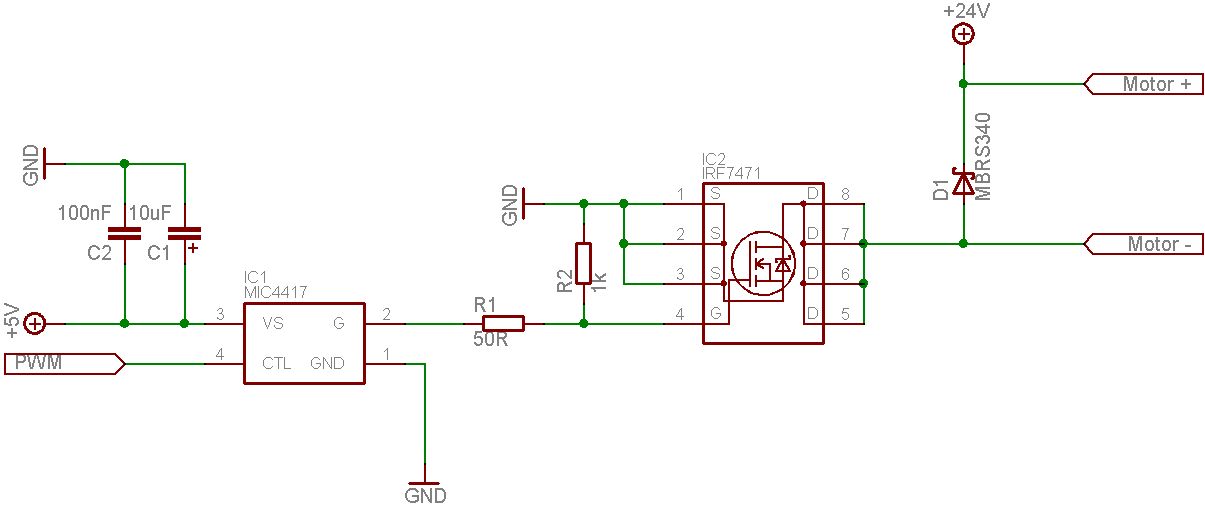
Habe die ganze Schaltung nochmal geändert. Die Freilauf-Schottkydiode sitzt jetzt direkt an den Klemmen für die abgehen Last und richtig rum. Habe an den Eingang des MOSFETs-Treibers einen 100nF und einen 10uF Kondensator parallel an die Versorgungsspannungs gehangen. So steht es auch in der Beschreibung. War vorher auch drin, hatte es nur mal rausgenommen. Am Gate habe ich einen Pull-down Widerstand von 1k drin, hatte vorher mal 10k probiert aber bei beiden keine Änderung. Der Gatewiderstand beträgt 50 Ohm, dadurch sind die Flanken recht flach, da ich dachte dass die Diode eventuell zu langsam sein könnte. Leider habe ich keine Daten der Schaltzeiten der Diode. Der MOSFET hat eine Falltime von 4ns. Habe den geänderten Schaltplan nochmal angehängt. Genauso ist es im Moment aufgebaut. Weiß jemand noch rat, ich verzweifle hier langsam. Bin schon seit 2 Tagen an dem Problem dran.
Mess nochmal die Signale nach, wie weit die Peaks sichtbar sind. Wenn diese an der Anode der Diode auftauchen, was ist dann an der Kathode ?
Also diese Peaks sehe ich überalle, egal ob nur über der Last, von Kathode zu Source, oder von Anode (Drain) zur Source. Habe gerade mal einen neuen MOSFET eingelötet und eine ganz neue Diode, also beides nicht defekt. Ich habe aber immernoch keine Ahnung wo das Problem her kommt?
D.h. die 24V Leitung zeigt auch den Peak ? Dann sind da ziemliche Leitungsinduktivitäten drin.
Ich würde wetten, Du hast ein Masse-Problem. Und zwar negative Spikes auf der Masse. Mach doch mal ein Bild von Deinem Aufbau inkl. Schaltplan.
Vllt mal eine fast recovery Diode verwenden, eine mit bspw 50ns "Reaktionszeit". Kann gut sein, dass deine PWM zu schnell für die Diode ist. Außerdem würde ich mal versuchen was passiert, wenn du die Versorgungsspannung deines Treibers auf 12V erhöhst. Bei der Schaltfrequenz bewegst du dich meiner Meinung nach ziemlich an der Grenze zwischen Gut und Böse. Bei einer höheren Versorgungsspannung ist der Treiber wesentlich schneller und kann außerdem mehr Strom liefern und aus dem Gate entnehmen, außerdem weist dann auch der FET besser Schalteigenschaften auf. Den Gate-Vorwiderstand würde ich ebenfalls noch verringern, der limitiert nämlich den maximalen Strom mit dem die Gate-Kapazität entladen wird. 10 Ohm oder 1 Ohm vllt., oder ganz weglassen (sollte meiner Meinung nach funktionieren)... mfg reiner
reiner wrote: > Vllt mal eine fast recovery Diode verwenden, eine mit bspw 50ns > "Reaktionszeit". Kann gut sein, dass deine PWM zu schnell für die Diode > ist. Er hat eine Schottky drin, schneller geht es nichtmehr. > Außerdem würde ich mal versuchen was passiert, wenn du die > Versorgungsspannung deines Treibers auf 12V erhöhst. Bei der > Schaltfrequenz bewegst du dich meiner Meinung nach ziemlich an der > Grenze zwischen Gut und Böse. Das hat er doch schon geschrieben: Er hat die Schaltflanken absichtlich verlangsamt. Wenn er schneller wird, wird das Problem vermutlich noch größer.
Hallo 2 Fragen dazu: 1.Wo ist die Masse des Scopes angeklemmt? Sollte ganz nah an Source sein. 2. Warum eine PWM mit 97kHz ?
>Er hat eine Schottky drin, schneller geht es nichtmehr.
Sorry, hab ich mal eben missachtet...
Stecken in den Lüftern und Pumpen eigentlich ganz normale DC-Motoren?
mfg reiner
So wie ich das verstanden habe, ist momentan ein Widerstand als Testlast dran. Von daher ist definitiv am Aufbau etwas falsch. Das Nachschwingen kann vorkommen, dass ich nicht schlimm, aber der Peak dürfte so nicht da sein.
Bei ohmscher Last, so hat er es jedenfalls ganz am Anfang geschrieben, schaltet der FET wohl problemlos...
Stimmt. Dann bleib ich bei meiner Aussage, dass das Ausschwingen normal ist (eben L + parasitäres C von Schottky + Mosfet). Nur der Spike dürfte nicht sein, aber das wird an einem schlechten Aufbau liegen, wenn dieser auch auf der 24V Leitung ist.
Oder aber er benutzt keine normalen DC-Motoren, ergo keine (mehr oder weniger) rein induktiven Lasten... Ansonsten dürfte dieser Peak ja eigentlich nicht so zustande kommen...
Auch bei einem schlechten Aufbau nicht (außer er hat statt zu Löten alles verdrillt, oder so...) ;)
Habe mal probiert den Treiber auf 12V zu legen, ging auch, aber keine Änderung an den Peaks. Um etwas Ordnung in das Chaos zu bringen. Ich habe keine ohmsche Last zum testen dran sondern eine Membran-Luft Pumpe und einen etwas größeren PC Lüfter. Die Ohmsche Last war nur zum testen wie es sich bei ohmscher Last verhält. Habe auch mal den Vorwiderstand am Gate auf 10 Ohm geändert, auch keine Wirkung, nur wieder schneller Flanken. Habe in die 24V Zuleitung mal einen 10uF und einen 1uF Kondensator geschaltet, so war es ursprünglich auch. Somit sind nun die Versorgungsspannungen frei von Peaks und das Gatesignal auch. Also der Transistor schaltet sauber durch, nur er sperrt halt nicht richtig, also kann es an einem zu niedrigen Gatepegel ja nicht liegen, denn mit den 12V war auch keine Änderung. Wegen dem Masseproblem. Im Layout habe ich die komplette Rückseite als Massefläche und auch da waren die Peaks da. Auf dem Lochraster Board habe ich das natürlich nicht, habe aber die Massen von 24V, 12V und 5V alle verbunden. Ich benutze ein Oszilloskop mit differenztastköpfen, also Potentialfrei, denn sonst kann ich auch mein PWM Ausgangssignal nicht messen. Ich benutze einen Takt von 97 kHz was das der einzige Baustein (PCA9634) war, der 8 PWM Ausgänge hat und über I2C angesteuert werden kann, denn dieses Signal kommt von meinem Controller. Mit dieser Schaltung sollen bis zu 8 Pumpen und Lüfter gesteuert werden für die Steuerung einer Brennstoffzelle. Ich hoffe ich konnte ein paar Sachen erläutern, aber bei meinem Problem bin ich immernoch nicht weitergekommen.
Selbst mit reinen Induktivitäten dürfte der Peak nicht da sein, vor allem nicht auf der 24V Leitung. Ich würde mal auf viel zu lange Kabel in der Schaltung tippen. Wie kommst du darauf, dass er nicht richtig sperrt ?
"Habe an den Eingang des MOSFETs-Treibers einen 100nF und einen 10uF Kondensator parallel an die Versorgungsspannungs gehangen." Bei induktiver Last ist ein 10uF Kondensator zu schwach dimensioniert, besser wäre es hier ein >220uF LSR-Kondensator zu verwenden, damit die entstehende Spannungsspitze sicher abgeführt werden kann. Die Leitungen zwischen MOSFET, FREILAUFDIODE und KONDENSATOR sollte dabei möglichst kurz gehalten werden.
PC-Lüfter sind Brushless Motoren. Korrigiert mich wenn ich falsch liege,
aber die lassen sich nicht so ohne weiteres PWM regeln. Jedenfalls nicht
alle...
was eine
>Membran-Luft Pumpe
ist weiß ich nicht, kann ich nichts zu sagen...
mfg reiner
Ich kann natürlich nicht in die Motoren reingucken, aber drauf steht dass es DC-Motoren sind. Der Aufbau ist wie gesagt nicht der Beste, da ich auf der Lochrasterplatine nun schon einige Male rumgelötet habe, aber auf der geätzten Platine habe ich drauf geachtet dass Last und Steuerteil getrennt sind und auch auf EMV Rücksicht genommen. Auf der geätzten Platine fehlt nur der Pull-Down und der Gatewiderstand, sonst ist der Aufbau der gleich und das ganze halt 8 mal. Foto kann ich gerade keins machen, da ich hier auf der Arbeit gerade keine Kamera dabei habe. Werde ich morgen nachholen, falls es dann noch nötig ist.
Zu den Motoren kann ich auch nichts sagen. Ich denke dass die 10uF schon reichen, denn laut Oszi sind die Signale einwandfrei ohne jegliche Störung. Ich denke dass er nicht richtig sperrt, weil ich am Oszi den Spannungsabfall von Drain nach Source messe und da ja sehen kann dass im durchgeschalteten Zusand nichts abfällt und im gesperrten Zustand dieser Peak und die Schwingungen da sind. Der Spannungsabfall im gesperrten Zustand sind nur ca. 1V, aber das varriert komischerweise auch jenachdem welche Taktverhältnis beim PWM-Signal anliegt.
Schonmal daran gedacht, dass ein Motor auch als Generator arbeitet und eine Spannung erzeugt ? Diese ist logischerweise ein kleinwenig niedriger als die Betriebsspannung...
@Reiner: Danke für den Link, ich bin selber Energieelektroniker und weiß ein bisschen was über Motoren, weiß halt nur nicht welche in meinem Fall verbaut sind.
Mir ist klar dass dieser Peak vom Motor kommt, aber wie bekomme ich ihn weg und warum sperrt der Transistor nicht richtig. Der Peak ist ja nicht schlimm, abgesehen von EMV-Problemen, aber ich erhalte am Ausgang nicht die gewünschte Spannung, die ich am Controller einstelle. Ich kann einstellen was ich will, ich habe nahezu immer Betriebsspannung, da der Transistor nicht richtig sperrt.
Lutz wrote: > Mir ist klar dass dieser Peak vom Motor kommt, aber wie bekomme ich ihn > weg Nochmals die Frage: Ist dieser Peak auf beiden Seiten der Diode ? > und warum sperrt der Transistor nicht richtig. Habe ich doch erklärt: Der Motor liefert eben 20V, und daher liegen im ausgeschalteten Zustand etwa 24V-20V=4V an.
Ja, der Peak liegt auf beiden Seiten der Diode an, also wenn ich von von Anode nach Source oder von Kathode nach Source messe und wenn ich von Kathode nach Anode messe, also nur über dem Motor, dann ist er auch da, aber kleiner. Ok, das stimmt mit dem Generatorbetrieb, da hatte ich garnicht dran gedacht. Das erklärt einiges, aber wie kann ich dann testen ob meine Steuerung ordentlich funzt, denn ich will ja eine Spannung vorgeben und damit den Motor langsamer laufen lassen, denn die Drehzahl ändert sich hörbar nur minimal. Aber wenn ich das PWM Signal messe, egal ob mit Multimeter oder Oszi, dann tut sich halt nichts. Liegt das auch an der erzeugten Spannung vom Motor?
Lutz wrote: > Ja, der Peak liegt auf beiden Seiten der Diode an, also wenn ich von von > Anode nach Source oder von Kathode nach Source messe und wenn ich von > Kathode nach Anode messe, also nur über dem Motor, dann ist er auch da, > aber kleiner. Dann sind deine Leitungen zu lang oder die Siebelkos zu klein bzw. nicht für die 100kHz geeignet. > Aber wenn ich das PWM Signal messe, egal ob mit > Multimeter oder Oszi, dann tut sich halt nichts. Liegt das auch an der > erzeugten Spannung vom Motor? Was heißt, tut sich nichts ? Wenn du das Tastverhältnis reduzierst, wird der Motor dann langsamer ?
Ja, er wird schon langsamer, ist nur die Frage ob er auch so viel langsamer wie ich es möchte und dies wollte ich eigentlich über die Spannung am Motor messen. Aber die erzeugte Spannung ist doch von der Polarität genau entgegengesetzt der aufgenommen Spannung, oder? Ja, das kann sein dass die Elkos zu klein sind. Ich auf der Lochrasterplatine auch keine Glättungselkos oder sonstiges nach dem Transistor, die habe ich nur auf der geätzten Platine.
Ok, jetzt gibt alles einen Sinn. Es war wohl alles nur ein riesengroßer Denkfehler. Ich werde mir die ganze Sache trotzdem morgen früh nochmal in Ruhe durch den Kopf gehen lassen. Vielen Dank an alle die mir geholfen haben.
Lutz wrote: > Ja, er wird schon langsamer, ist nur die Frage ob er auch so viel > langsamer wie ich es möchte Bei einem Tatsverhältnis von 0 sollte der Motor stehen. > und dies wollte ich eigentlich über die Spannung am Motor messen. Das geht auch, dazu müsstest du in der Aus-Phase die Spannung am Motor messen (und entsprechend filtern). Diese ist proportional der Drehzahl. > Aber die erzeugte Spannung ist doch von der > Polarität genau entgegengesetzt der aufgenommen Spannung, oder? Genau, daher siehst du auch eine geringe Spannung, da die vom Motor erzeugte von der Betriebsspannung abgezogen wird.
Warum denn unbedingt 97 kHz? Probier mal, ob mit 2 kHz die Impulse so lang sind, dass die Schwingung abklingt.
@Marco: Kann die Frequenz nicht ändern, da mir der Baustein (PCA9634) feste 97kHz liefert, das ist der einzige Nachteil an dem Baustein, aber es gab keinen anderen der sonst noch 8 frei wählbare PWM Signale ausgibt und über I2C ansteuerbar ist. @Benedikt: Das mit den geringen Spannung macht mich noch stuzig. Ich habe ein Versorgungsspanung von 24V. Wenn ich jetzt einstelle dass mein Motor mit 12V laufen soll, also ein Tastverhältnis von 1:1 dann habe ich immernoch ca. 20V. Wenn jetzt die Induktionsspannung gegengesetzt ist, dann müßte die Spannung ja kleiner als 12V sein? Oder ist da immer noch was faul? Eigentlich hatte ich das Problem als abgehakt gesehen, aber das mit der umgekehrten Spannung macht mir noch Sorge
Lutz wrote: > Das mit den geringen Spannung macht mich noch stuzig. Ich habe ein > Versorgungsspanung von 24V. Wenn ich jetzt einstelle dass mein Motor mit > 12V laufen soll, also ein Tastverhältnis von 1:1 dann habe ich immernoch > ca. 20V. Der Mittelwert der Spannung beträgt dann 12V, der Effektivwert der Spannung liegt aber bei 17V ! > Wenn jetzt die Induktionsspannung gegengesetzt ist, dann müßte > die Spannung ja kleiner als 12V sein? Oder ist da immer noch was faul? Wie misst du die 20V ?
Ich messe die Spannung mit einem Multimeter oder mit einem Oszilloskop. Beides zeigt mir 20V an (natürlich mit minimalen Abweichungen von ca. 0,5V). Beim Oszilloskop sehe ich eine sehr gut geglättete Spannung, bis auf den Peak den ich auf dem geglätteten PWM Signal auch sehe. geglättet habe ich das ganze mit einem 1000uF und einem 1uF parallel und zusätzlich noch eine 22uH Induktivität in Reihe. Die 20V die ich mit dem Oszilloskop messe, messe ich direkt über den Motor mit Differenztastköpfen, also Potentialfrei. Ich habe im Netz aber noch eine Formel gefunden die man wohl beachten sollte, da man nicht direkt die Spannung sondern die Leistung einstellt. Auf folgender Seite steht dass man die Versorgungsspanung quadrieren sollte um richtig umrechnen zu können. http://www.roboternetz.de/wissen/index.php/Pulsweitenmodulation Gilt aber nur für ohmsche Laste. Was mache ich bei induktiver Last? Mit dieser Formel komme ich bei eingestellten 12V auf gemessen 16V am Oszi und Multimeter. Deswegen wollte ich diese Formel in meine Quellcode am Controller einbauen, da ich damit näher an die eingestellte Spannung komme, aber ist diese Überlegung richtig?
97 kHz sind gut fuer Leds....wahrscheinlich nicht fuer deinen Motor. Jemand schrieb oben: reduziere mal die Steuerfrequenz.... generiere eine beliebige Frequenz zB <5kHz und steuere den driver an. Moechte der FET nicht lieber mit einer hoeheren Steuerspannung leben?
Ich weiß das 97kHz nicht optimal sind aber ich dachte eine höhere Frequenz machen dem Motor auch nichts. Eine Andere Frequenz zu erzeugen ist so einfach nicht möglich, da ich leider über keinen Funktionsgenerator verfüge, aber ich könnte versuche mir einen zu besorgen. Wenn es daran läge hätte ich ein Problem, denn da müßte ich wieder auf die Suche nach einem anderen Baustein gehen den es aber wohl nicht gibt, denn ich benötige dann einen Baustein der über I2C gesteuert wird, der 8 unabhängig voneinander einstellbare PWM-Ausgänge hat mit einer Frequenz kleiner 5kHz. Eine höhere Steuerspannung habe ich schon versucht, aber bei 12V ändert sich auch nichts.
Lutz wrote: > > Ich habe im Netz aber noch eine Formel gefunden die man wohl beachten > sollte, da man nicht direkt die Spannung sondern die Leistung einstellt. Das ist genau das was ich auch schon geschrieben hatte: Bei 50% hat man nicht die halbe Spannung, sondern Wurzel(2), also die 0,7 fache Spannung. Bei einem Motor ist das ganze sehr viel komplizierter. Das einfachste: Du misst die Kurve selbst, und legst diese als Tabelle in der Software ab. Bei konstantem Tastverhältnis, ist die Motordrehzahl nämlich stark von der Belastung des Motors und von der PWM Frequenz abhängig. Oder du baust dir eine Schaltung, die die Motorspannung misst, und baust diese in eine Regelschleife ein. Aber wie ich weiter oben schon geschrieben habe, sollte die Motorspannung nur während der Aus-Phase des Mosfets gemessen werden, denn diese Spannung ist dann proportional der Drehzahl. Auf diese weise kann man relativ leicht einen Drehzahlregler bauen. Das aufwendigste daran ist die Elektronik, die die Spannungsmessung nur während der Aus-Phase freigibt.
Das mit der Wurzel 2 ist aber so nicht richtig, denn das ist ja nur bei Sinusförmigen Spannung so, bei idealem Rechteck müßte der Mittelwert gleich Effektivwert sein. Das es viel Aufwand ist die Spannung am Motor nur im ausgeschaltetem Zusand zu messen, werde ich das wohl lassen. Mache wohl eher die Variante mit der Tabelle, denn die habe ich schon aufgenommen. Ich muß nur mal meinen Chef fragen, ob es überhaupt nötig ist, denn die ganze bekommt sowieso noch eine relativ große Regelung, ich mache nur die "Firmware". Dort sind sowieso viele Sensoren im System, so dass eine Drehzahlregelung nicht nötig ist und es wäre viel zu aufwendig dass ganze für 8 Motoren zu machen, da alle Pumpen und Lüfter unterschiedlich sein werden. Habe mir mal einen Funktionsgenerator besorgt und werde mal versuche ob ich es mit einer niedrigeren Frequenz hinbekomme.
Lutz wrote: > Das mit der Wurzel 2 ist aber so nicht richtig, denn das ist ja nur bei > Sinusförmigen Spannung so, bei idealem Rechteck müßte der Mittelwert > gleich Effektivwert sein. Nein, das stimmt nicht. Wie du ja selbst schon geschrieben hast, steuert PWM die Leistung. Und die Spannung ist Wurzel(P*R). Da R konstant ist, ist dieser uninterressant. Daher ist die Spannung proportional der Wurzel aus dem Tastverhältnis, und das gilt nur einem Rechteck. Bei einer Phasenanschnittsteuerung von einem Sinus wird das ganze sehr viel komplizierter.
Ja, das stimmt auch wieder. Das mit der kompliziertheit bei einer Phasenanschnittsteuerung kenn ich, hab das mal in der Theorie gemacht. Habe jetzt mein PWM-Signal mal mit einem Funktionsgenerator simuliert. Habe es auf den Treiberbaustein gegeben, mit 5V, so wie er es normalerweise auch aus dem Baustein bekommt. Die Peaks fangen ab ca. 1,5kHz an, woran liegt das jetzt dass die bei 1,5kHz anfangen? Desweiteren beobachte ich, dass die Spannung am MOSFET im Sperrfall langsam ansteigt. Schwingen tut sie allerdings nicht, dies erst ab den besagten 1,5 kHz.
schon mal den MOSFET ausgetauscht? nicht dass du auf einem Defekten Teil rumrutschst ;-)
Hi! >Um etwas Ordnung in das Chaos zu bringen. Ich habe keine ohmsche Last >zum testen dran sondern eine Membran-Luft Pumpe und einen etwas größeren >PC Lüfter. Mit 97 KHz kannste doch 1-2-fix einen Stepdownwandler bauen. Die Membranluftpumpe wird wohl einen Eisenkern haben und die Schwingungserzeugung geht bestimmt über PWM ein/aus -verbessere mich wenn ich falsch bin. Lüfter mögen auch eher Gleichsp. Sollte also passen. Wenn du eh schon einen Treiber benutzt sollte auch der N-Kanalfett gehen. Wenn nicht, P-Kanal benutzen. Eine Shottkydiode wirste ja eventuell noch verbauen können, Spulen und C's haste ja schon. Einen Versuch wäre es wert. Viel Erfolg, Uwe
Ich denke auch das Du dir hier einen Schwingkreis gebaut hast, wie Benedikt schon geschrieben hat. Hat der Motor evtl. eingebaute Kondensatoren zur Entstörung die sich nun im PWM-Betrieb negativ auswirken ? Eine Idee: Motor über einen Widerstand an Funktionsgenerator (Rechteck) hängen und Frequenz hochdrehen. Spannung am Motor mit Oszi messen. Wenn sich nix tut mal ein bisschen an der Welle drehen. Ich denke der Motor braucht nicht zu laufen. Vielleicht findest Du ja eine Frequenz bei der der Motor in Resonanz geht. Keine Ahnung ob das funktioniert... Ich würde mal X7R/Z5U Kondensatoren parallel zum Motor schalten, oder einen Saugkreis parallel zum Motor schalten, vielleicht reicht auch ein Widerstand/VDR. Viel Erfolg und nicht aufgeben :)
Hast du zufällig nen Speicheroszi zu Hand?, dann lass mal den FET fort und öffne nen normalen Schalter mit dem Motor drann dann nen häng parallel zu diesem nen Serien-RC-Glied tau ca 2 µS und experimentiere ein wenig. Des Ergebniss kannst du dann auf die FET-Schahltung übernehmen Im übrigen ist der Peak garnicht ungewöhnlich er dürfte ohne die Freilaufdiode und bei besserer zeitlicher Auflösung eher noch ein vielfaches der Betriebsspannung erreichen. aber UB+ Uf(der Freilaufdiode)ist wohl im Rahmen. Wenn du nicht aktiv bremsen willst, dann ist die Gegenspannung auch normal und o.k.
Hi! >Beim Oszilloskop sehe ich eine sehr gut geglättete Spannung, bis >auf den Peak den ich auf dem geglätteten PWM Signal auch sehe. geglättet >habe ich das ganze mit einem 1000uF und einem 1uF parallel und >zusätzlich noch eine 22uH Induktivität in Reihe. Beim hinterdenken der Schaltreglervariante ist es mir gestern wie Schuppen von den Augen gefallen - dein Problem sind die Kondensatoren. Im Einschaltmoment nehmen die ja Energie auf, die sie in den Pausen abgeben. Deine Spannung kann also garnicht auf 0 gehen, jedenfalls nicht so schnell. Um eine Spannung zu erzeugen die den PWM-Prozenten entspricht müsstest du in der Ausschaltphase entladen, ist aber nicht. Du hast also eigentlich eine gesiebte Gleichspannung. Lässt du die C's weg haste erneut eine recht hohe Spitze die aber mit einer schnellen Diode paralell zur Ind. wegzubringen sein sollte. Oder aber du baust einen geregelten PWM/Schaltregler. Viel Erfolg, Uwe
Hallo, mal eine kurze Frage: Wie lang ist Deine Leitung vom FET zum Motor? Wenn schon eine so hohe PWM-Frequenz, dann sollte diese Leitung so kurz wie möglich sein. Am besten Steuerplatine direkt am Motor montieren, auch der Abblockkondensator (Elko + 100nF parallel) möglichst nah dran. Da auch die Ströme recht hoch dürfte Dein Aufbau sonst einen hervoragenden Störsender im Mittelwellenbereich abgeben. Gruss Mike
Angehängte Dateien:
-

PWM-Test.jpg
52 KB
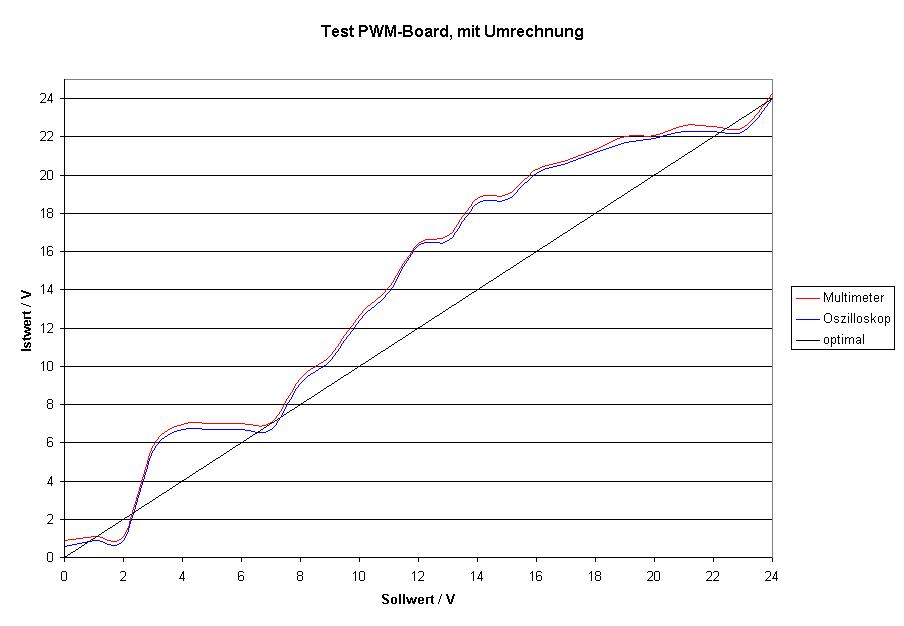
@lontano: Ich habe schon einen ganz neuen Transistor sowie neue Schottky-Diode eingelötet, aber keine Änderung. @Uwe: Ja, das mit den Kondensatoren leuchtet ein, aber es waren keine drin. Ich hatte die komplette Glättung draußen gehabt, damit nichts schwingen kann. Also warum kann dieses System schwingen? Was heißt geregelter PWM/Schaltregler? Was heißt schnelle Diode? Ich habe doch schon eine Schottky-Diode. Habe auch mal eine andere Schottky-Diode probiert, aber keine Änderung. Habe leider keine Daten über die Schaltgeschwindigkeit, da diese im Datenblatt nicht drin steht. @Mike: Meine Leitung sind im Moment beim Versuch nur ca. 20cm lang. Das mit dem Störsender habe ich mir auch schon überlegt. Deswegen will ich ja auch so gut wie möglich glätten. Das ganze wird später sowieso noch in einem EMV-Labor getestet. Im späteren System können die Leitungen bestimmt bis zu 2m lang werden. Also sehr gute Antennen ;-). Mein Problem ist nach wie vor, die eingestellt Spannung kommt nicht am Ausgang heraus. Mein Chef meinte eben auch, die Schwingung ist eigentlich egal ich muß nur die eingestellte Spannung auch am Ausgang haben. Ich habe mal den Verlauf der Ausgangsspannung zur eingestellten Spannung angehängt. Ich würde es auch softwaremäßig lösen, aber es ist bei jedem Motor unterschiedlich. Liegt dieser Verlauf an dem Schwingen des MOSFETs? Diese Kurve ist schon mit der Quadrierung, diese habe ich softwaremäßig schon berücksicht.
> Mein Chef meinte eben auch
Tja, entweder ihr stellt eben jemanden ein der das kann, oder ihr
beauftragt einen externen Ingenieur.
Danke für den Tipp, aber es halt meine Diplomarbeit und da muß ich jetzt durch.
Kommt es eigentlich wirklich auf die Ausgangsspannung an, oder letztendlich nur darauf, daß die Drehzahl etwa dem Tastverhältnis entspricht? Da wäre doch die spannung Wurst - oder?
Prinzipiell schon, es soll einfach nur der Motor langsamer werden. Aber das geschieht doch proportional zur Spannung. Mein Problem ist halt, dass die Spannung fast konstant bleibt, weil hat der MOSFET durch die Schwingungen kaum sperrt. Der Motor wird halt hörbar nicht langsamer, was mir die Spannung bestätigt.
Habe jetzt mal ein bisschen mit den Kondensatoren und der Spule am Ausgang, also die Glättung, rumexperimentiert. Nur mit Kondensatoren ist die Schwingung wesentlich geringer, komischwerweise sperrt dann der MOSFET quasi garnicht mehr. Er schaltet zwar sehr gut und fast schwingungsfrei, aber die Spannung ändert sich fast garnicht, also weniger als mit Schwingungen und mit Spule. Hat jemand eine Idee woran das liegen kann?
Ich weiß nicht, ob schon mal gesagt: was für eine Art Motor ist das? Ganz normale mit Permanenterregung? FÜr solch einen hatte ich auch mal eine PWM-Steuerung gemacht (keine Regelung). Lief rein subjektiv ganz gut, hing auch ganz gut am "Gas". Ich kann aber nicht sagen, ob dessen Kennlinie (Drehzahl/Tastverhältnis) wirklich so gerade war, wie es subjektiv mir vorkam. Lief allerdings auch immer nur mit Last. Wenns bei Dir auf eine grade Kennlinie ankommt, würde ich irgendwie eine Regelung reinbauen, denn schließlich ist die Drehzahl ja auch noch lastabhängig. Zeigt der Motor nur im Leerlauf dieses Verhalten? Wie sieht es denn aus, wenn er mal etwas Last bekommt? So einen Motor an einer PWM stelle ich mir nämlich wie ein R-C Glied mit vorgeschalteter Diode davor vor, wo der C über D und R immer schön die PWM-Impulse bekommt. Parallel zum C ist noch ein hochohmiger R als Last. Entladen wird der C also nur wenig, so daß sich praktisch immer eine weit höhere Spannung am C einstellt, als es dem Tastverhältnis entspricht. So sehe ich es auch beim Motor - er bekommt immer schön die Impulse geliefert mit voller Spannung, wenn aber keine Last dran ist, bremst ihn in den Pausen nur die eigene Reibung (also eigentlich nicht so viel). D.h. das Gleichgewicht aus zugeführter Leistung und abgeführter Leistung stellt sich erst bei höherer Drehzahl ein. Gäbe es überhaupt keine Last (auch keine Reibng - theoretischer Fall), würde der Motor immer mit Maximaldrehazhl laufen, weil ihn ja nix mehr bremst, auch bei kleinstem Tastverhältnis (>0). Ist erstmal nur eine Hypothese von mir, aber so würde ich es mir als ersten Ansatz vorstellen als Begründung für die gemessene Nichtliearität. Daß übrigens die gemessene Spannung über dem Motor nicht dem Tastverhältnis entspricht, liegt ganz einfach an der intern erzeugten Gegenspannung des Motors, die praktisch proportional der Drehzahl ist. Generell kommen mir die 96kHz etwas reichlich viel vor (auch wenn von dem Baustein bereits vorgegeben). Dürfte für Mosfet wie auch für den Motor reichlich Verlustleistung bedeutetn (Umschaltverluste im Mosfet, Ummagnetisierungsverluste im Wicklungskern).
Lutz, wie mein Vorredner finde ich auch, dass die Frequenz ungewöhnlich hoch ist. Im Grunde schwingt nicht der MOSFET, sondern die Induktivität des Motors zusammen mit Kapazitäten, die wohl auch im Motor zu suchen sind. Ich würde mal eine rein ohmsche Last statt des Motors testen, ob dann die Schwingungen weg sind. Ich tippe halt auf die Induktivität des Motors, die mit parasitären Kapazitäten entstehenden Abschaltschwingungen kannst Du wahrscheinlich nur mildern, wenn Du Motor und MOSFET durch einen Tiefpass entkoppelst, also RC-Glied, wobei C parallel zum Motor sein sollte. Dieter
Vielen Dank für die Tipps. Ich weiß dass 97kHz viel sind, aber daran kann ich nichts ändern. Dass die verluste sehr groß sind im FET kann ich mir nicht vorstellen, da er sehr schnell schaltet, also sehr steile Flanken hat. Zum Motor, es ist eine Membran-Luft-Pumpe, so eine soll später auch im System drin sein, die anderen Motoren stehen noch nicht fest. Nach dem Typenschild zu urteilen, läuft der Motor schon fast mit Nennlast, zumindest zieht er annähernd Nennstrom. Ich habe es mit Ohmscher Last getestet, da sind keine Schwingungen da, und ich weiß dass es am Motor liegt. Mein Kollege meint es wäre ein normaler bürstenloser Motor ohne Elektronik. Dürfte ja eigentlich gehen.
> Mein Kollege meint es wäre ein normaler bürstenloser Motor ohne > Elektronik. Dürfte ja eigentlich gehen. Wohl eher mit Bürsten als ohne. Oder machst Du die Kommutierung und Auswertung der Hall-Sensoren?
ich denke wohl auch, daß irgendwoher die Kommutierung kommen muß - also Bürsten werden wohl drin sein, wenn keine Elektronik ...
Hi! Wie war das, du misst doch die Spannung über dem Motor, Oder? Wäre es nicht sinnvoller mal den Strom zu messen? Hmm, du hast nunmal Induktivitäten welche beim Abschalten Energie produzieren(und die Lüfter haben Elkos) bei 97KHz bricht da die Spannung nicht sehr weit ein, es sei denn du bist bei wasweisich 10% PWM. Die Spannung entspricht dann aber auch nicht deinem PWM-Verhältnis, weil du in der Ausschaltphase die Energie nicht entlädst. Fast hätte ich gesagt nimm mal einen L165 da sollte das anders aussehen, aber bei 97KHz....? >Was heißt geregelter PWM/Schaltregler? Was heißt schnelle Diode? Naja die PWM mit RC glätten und als Sollwert für einen Schaltregler verwenden. Über seine Rückführung hält der dann die Spannung konstant dem PWM-Verhältnis. Die Rückführung kannste dann aber auch gleich dem µC aufhalsen damit er die PWM verschiebt, also regelt. Nunja verzwickte Geschichte, trotzdem viel Erfolg, Uwe
Lutz, also wie gesagt, DC-Motor ohne Elektronik und ohne Bürsten, das geht nicht. Membranpumpe -- ist das nicht eher eine Art unterbrechender oder kummutierender Elektromagnet denn ein Motor? Ich kenne das von Aquarienpumpen für AC. Dass die Schwingungen so stark sind, deutet darauf hin, dass die Streuinduktivität der Last relativ groß ist, und diese wird auch nicht wesentlich geringer bei Auslastung. Dennoch bleibe ich dabei -- mit einem geeigneten Tiefpass am Ausgang müssten die Schwingungen hinreichend beseitigt werden können. Dieter
eine irre Sache ! was passiert denn wenn du 12Vdc anlegst? Dreht sich da ueberhaupt etwas? Schliesse doch mal den elementaren Stromkreis...wie im ''kleinen Baukasten des Elektrotechnikers '' beschrieben !
Das mit dem Tiefpass leuchtet mir ein, aber wäre ein LC-Filter nicht sinnvoller als RC, denn dann habe ich nicht die großen Verluste am Widerstand. An Strommessung habe ich auch schon gedacht, bisher aber noch nicht machen können, da mir ein geeigneter Widerstand gefehlt hat. Werde es aber mal machen.
Lutz, eine Induktivität wird bei dieser Schaltung stets mit Gleichstrom beaufschlagt sein, das würde bei Verwendung mit Kern evtl. Sättigungsprobleme bringen. Vielleicht bringen ein paar Versuche mit Simulation was, mal sehen... Dieter
Lutz, also Du hast schon mal Kondensatoren parallel zum Motor gehabt? Wie groß waren die? Dieter
Also ich denke, ein RC oder LC-Glied vor dem Motor wird zwar sicherlich was an den Schwingungen ändern, dürfte aber nicht dafür sorgen, daß die mittlere Motorspannung (Drehzahl) dem Tastverhältnis entspricht. Im Gegenteil, wenn das LC-Verhältnis relativ klein ist (kleines L, goßes C), sind die Stromimpulse vom Mosfet noch ein ganzes Stück höher, d.h. mehr Energie wird in die Anordnung reingepumpt, obwohl der Motor vielleicht immer noch nur im Leerlauf dreht. Es fließt aber nicht die entsprechende Energie ab, womit ich eher denke, daß damit die mittlere Spannung bzw. Drehzahl noch mehr ansteigt (Richtung 24V).
@Jens: Richtig, das darf man nicht übertreiben, sonst lädt sich das C auf volle Spannung und behält diese über die Pausen aufrecht. Meiner Ansicht nach kommt man eigentlich fast nur noch mit Push-Pull-Betrieb weiter. Eine ohmsche Belastung parallel zum Motor würde ich noch testen... Dieter
Danke mal für die ganzen Tipps. Habe gerade mal ein RC-Tiefpass probiert, aber keine Wirkuns. Habe ihn auf 150kHz eingestellt. Habe einen 1 Ohm wiederstand in Reihe zum Motor und parallel zum Motor einen 1uF Kondensator. Also wenn ich euch richtig verstanden habe, dann ist ein großer Kondensator parallel zum Motor nicht gut. Ja, ich habe Kondensatoren parallel zum Motor, einen 1000uF und einen 1uF für die hochfrequenten Schwingungen, außerdem ein 22uH SMD-Drossel in Reihe zum Motor. Das ist mein normaler Aufbau, so war er am Anfang geplant und so habe ich ihn ätzend lassen. Habe mal den Strom gemessen, aber nur mit Multimeter, aber keine wirkliche Änderung, also ähnlich der Spannung. Mein Chef meinte man kann davon ausgehen dass sich die Drehzahl linear mit der Spannung ändert. Habe mal das Datenblatt vom Motor geholt, also es ist ein 24V DC-Motor. Er ist bürstenlos aber mit Elektronik. Geht es überhaupt dass man die Drehzahl proportional zum Tastverhältnis hinbekommt?
Lutz, mach mal alle Kondensatoren wieder weg, dass Du die Schaltung wie oben angegeben wieder hast. Schalte mal abwechslungsweise einen Widerstand 470 Ohm / 1 W direkt parallel zum Motor. Wie verändern sich die Schwingungen und die Spannungsverläufe? Dann Widerstand weg und schnelle Diode parallel zum Motor (Anode auf -Motor). Spannungsverlauf? Die strikte Proportionalität wird wohl nicht ganz gelingen, aber man müsste zumindest den Drehzahlbereich durchlaufen können. Dieter
Meinst Du ohne Freilaufdiode parallel zum Motor, nur ein Widerstand, der dann quasi die Energie "verbraten" soll? Werde das mal probieren. Ja, annähernd habe ich den Verlauf ja schon, siehe grafik weiter oben, will aber ganz ran, ohne eine Kurve die ich mathematisch berechnen und softwaremäßig ausgleichen kann. Werde Deinen Vorschlag mal testen.
nimm den Motor raus und haenge eine Gluehbirne 12V (Auto) oder 24V (LKW). wenn da nichts laeuft,dann ist dein Stromkreis OFFEN. ;-) das gibt es doch nicht 5 Tage vor einem Motor zu sitzen und nicht zu wissen was es fur einer ist....Diplomarbeit ? Und der gute alte Herr OHM drehte sich schmerzend im Grab herum weil du W_IE_derstand geschrieben hast ! Wann gibst du endlich reine Gleichspannung auf den Motor um zu sehen ob der ueberhaupt laeuft?
Weil es eigentlich unwichtig was es für ein Motor ist, das später sowieso 8 verschiedene Motoren da ran kommen, ich habe einfach irgendeinen Motor genommen, um mal eine Last zu simulieren. Ich weiß, ab und zu rutscht das e da noch mit rein beim widerstand ;-) Mein Stromkreis ist nicht offen, der Motor läuft ja. Ich habe ihn mal an reine Gleichspannung direkt aus dem Netzteil gehangen, und er verhält sich genauso wie in meiner Schaltung, er läuft bis runter zu ca. 5V DC, dann bleibt er stehen. Hatte auch schon nur einen 100 Ohm Widerstand dran und er wurde warm, also ist der Stromkreis wohl zu, da brauche ich keine Glühlampe für. (Übrigens, es heißt ebenso wenig GlühBIRNE wie es wIEderstand heißt, sondern Glühlampe). Bin gerade die Daten am aufzeichnen mit dem 470 Ohm Widerstand, dauert etwas, denn es ist immer doof die Daten am Oszi auf Diskette zu machen und dann wieder in Excel einzubinden.
Warum 470 Ohm ? Hast du am Motor 470 Ohm gemessen? Ist deine Stromversorgung eigentlich ausreichend dimensioniert?
Angehängte Dateien:
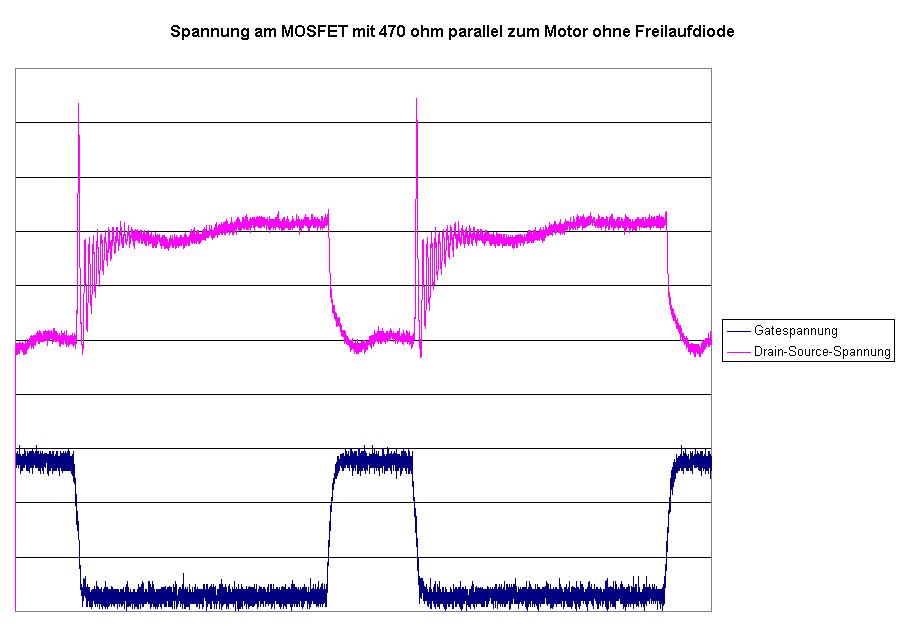
@Dieter: Habe mal 470 ohm Widerstand und Diode abwechselnd parallel zum Motor probiert, habe aber keine sinnvollen Ergebnisse erhalten. Das Schwingen war zwar besser, aber der Motor hat nur minimal auf das Taktverhältnis der PWM reagiert, also die Spannung war immer annähernd 24V.
Angehängte Dateien:
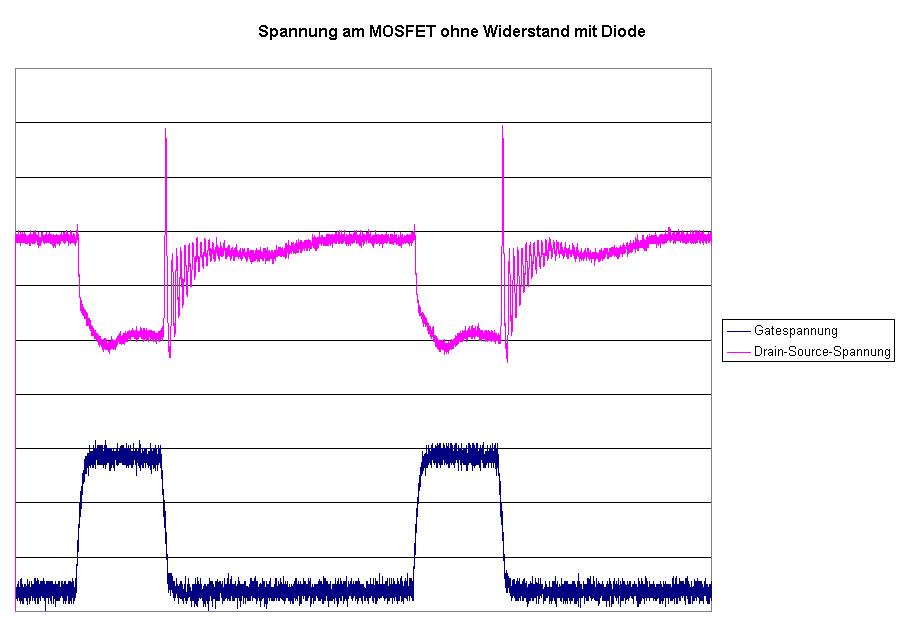
Zu den Diagrammen: Pegal am Gateeingang 5V. Die Spannung die über Drain-Source abfällt ist nur ca. 2V, obwohl annähnerd 24V abfallen müßten.
Angehängte Dateien:
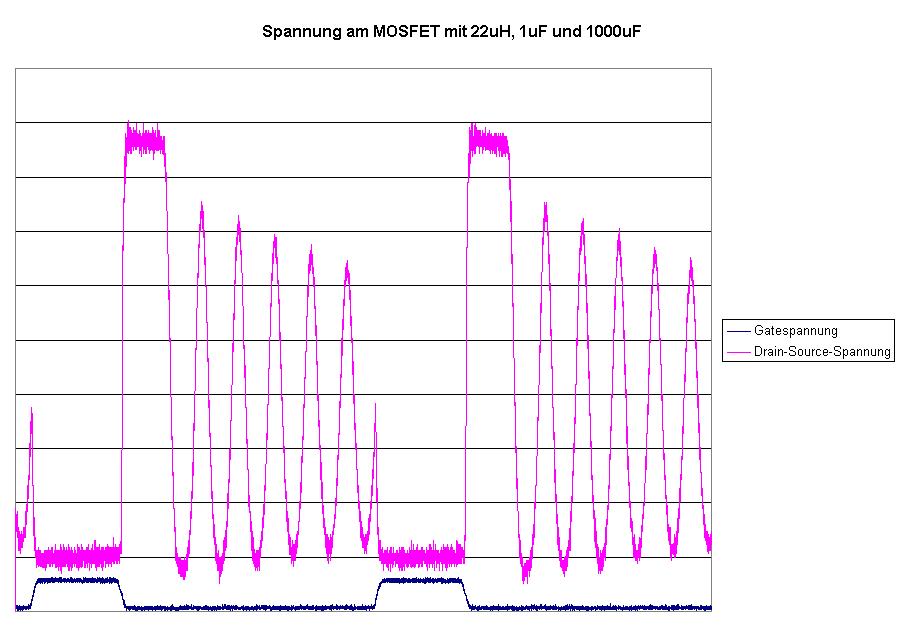
Ich habe gestern noch folgendes gemessen: habe mal mit der Spule in Reihe zum Motor und den Kondensatoren parallel zum Motor rumprobiert. Dabei kam folgendes raus: Mit Spule und Kondensatoren reagiert der Motor ganz gut auf die Taktung, aber der MOSFET schwingt sehr stark wenn er sperren soll, er sperrt aber kurzzeitig die vollen 24V. Ohne Spule, schwingt der MOSFET wesentlich weniger, aber er sperrt so gut wie garnicht mehr und der Motor reagiert quasi garnicht auf die Taktung.
Angehängte Dateien:
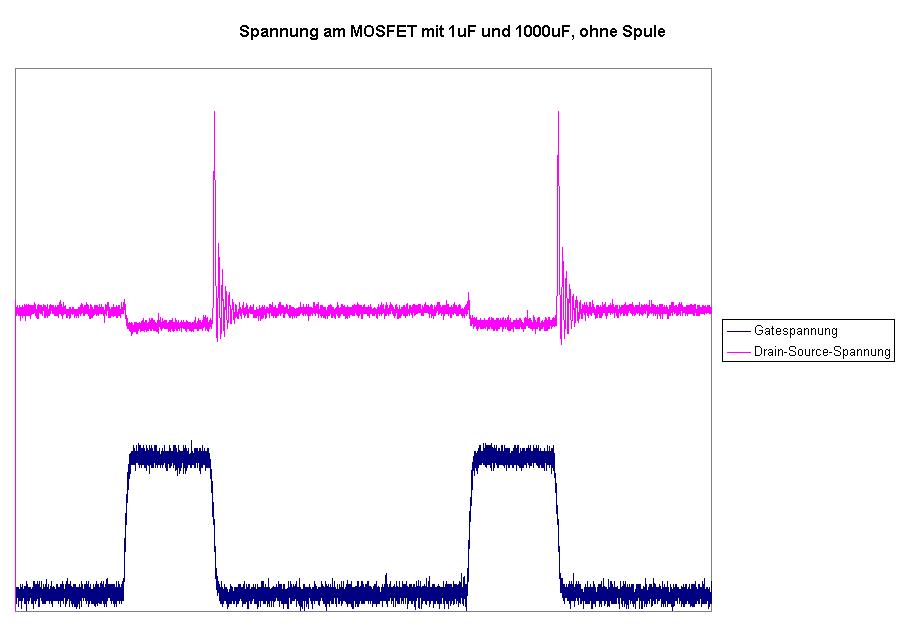
Hier noch das Diagramm nur mit Kondensatoren.
Was meinst Du damit dass die Stromversorgung ausreichend dimensioniert ist? Ich benutze ein normales Labornetzteil, habe 24V einstellt die Strombegrenzung ist weitgenug, also er geht nicht in die Begrenzung. Es fließt laut Netzteil ein Strom von ca. 300mA. Also recht wenig, denn später soll etwas über 1A fließen, halt bis 30W.
Das hat doch alles nix mit Labornetzteil gut oder böse oder sonstwas zu tun. Daß Du immer die 2 V überm Transistor siehst, liegt einfach an der Gegenspannung, die der Motor in den Taktpausen zeigt (ein Motor ist schließlich auch ein Generator). Diese Spannung hat nix mit dem Tastverhältnis zu tun (zumindest nicht direkt). Daß es scheinbar mit L und C besser läuft, liegt wohl daran, daß die L beim Ausschalten ihre gespeicherte Energie wieder über die Diode verbrät - der Motor bekomt also weniger Energie (in den Oszillogrammen sieht man ja, wie die Spannung relativ bei max verbleibt - da wird die Spulenenergie verbraten), womit er auch scheinbar langsamer läuft bei mittleren Tastverhältnis. Aber diese scheinbar gefundene Kombination von C und L Werten ist nicht universell verwendbar - bei jedem anderen Motor mit unterschiedlicher Last wirst Du wieder eine andere krumme Kennlinie sehen. Da sehe ich nur eine Regelung als Ausweg. Somit glaube ich nicht, daß dies der richtige Weg ist (RC auch nicht - verbrät ja schließlich erst recht Energie im R). Die Schwingungen selber kannste ignorieren, wenn es nur um die Ursache für die zu hohe mittlere Spannung/Drehzahl geht
Lutz, also insofern ist es schon wichtig, was für ein Motor das ist, als dass er ja eine interne Elektronik hat. Und wie diese nun selbst darauf reagiert, ob sie reine Gleichspannung erhält oder eine abgehackte Gleichspannung als PWM, ist schon ein Unterschied. Möglicherweise ist ja intern schon ein Kondensator irgendwo vor dem Motor, die die Spannung eine gewisse Zeit aufrechterhält. Dann kann man mit einer Open-Drain-Ansteuerung gar nichts machen, sondern nur mit Push-Pull. Zum Bild Spannung_MOSFET_mit_470_ohm_ohne_Diode.jpg, ist da das obere Dach der Magenta-Linie wirklich nur 2 V gegenüber unten? Schon mal einen anderen Motor eingesetzt, der einfach nur Bürsten hat? Dieter
Hab gerade an einer ähnlichen Schaltung gearbeitet. Kein Motor dondern eine recht kräftige Magnetspule für eine Bremse. Habe beim Experimentieraufbau auch zu Anfang recht starke Überschwinger gehabt. Nach einigen Veränderungen lief alles bestens. Es ist nicht unwichtig wo die Schottkydiode die Paralell zur Motorwicklung liegt angebaut wird. Die soll gleich beim FET sein. schon einige Zentimeter Abstand bringen deutlich messbare Spikes. Das Nachschwingen kommt von der Motorinduktivität. Ein Keramikkondi (100nF) und ein Elko von mind 10µF in der Versorgungsspannung der Schaltung auch in nähe zum FET dämpfen (vorausgesetzt die Versorgung ist 'hart' genug) die Schwingungen. Die Rückwärtsdiode im FET ist oft geringer Qualität, es kann was bringen paralell zum FET eine Schottky zu schalten. (bei meinem FET IRL540N war sie bei ca. 25kHz PWM Takt ausreichend). Die geringe Spannung die Du misst kommt von der Gegenspannung des Motors in den Schaltpausen. Wenn Du die Schaltung mal statisch oder sehr langsamer PWM beteibst und die Spannung über dem FET mist kanst Du einen eventuellen Ansteuerproblem schnell auf die Schliche kommen.
@ warze (Gast) >Die Rückwärtsdiode im FET ist oft geringer Qualität, es kann was bringen >paralell zum FET eine Schottky zu schalten. (bei meinem FET IRL540N war >sie bei ca. 25kHz PWM Takt ausreichend). Das mag zwar stimmen, aber nach den Oszillogrammen zu urteilen haben wir wohl keine negativen Spikes, die die interne Diode überfordern könnten. Insofern dürfte eine zusätzliche Schottky parallel zum FET nix bringen.
Einen "beliebigen" Motor wirst du nie sauber mit PWM steuern können, z.B. bei einem BLDC bringst du damit nur die Steuerelektronik durcheinander. (Das ist auch der Grund, warum PWM-Regelbare PC-Lüfter einen vierten Anschluss für das PWM-Steuersignal haben) Und jede Menge Verluste im Eisenkern des Motors hast du auch, wenn du versuchst den mit fast 100kHz umzumagnetisieren. Saubere Lösung wäre die Steuerung über die anliegende Spannung: (*) Mit einer zusätzlichen Schottky-Diode baust du deinen PWM-Regler mit LC-Glied einfach in einen Step-Down Drosselwandler um. Evtl. Ausgangskondensator und (Speicher!-) Drossel umdimensionieren. Rückkopplung über gemessene Ausgangsspannung oder (besser) Motordrehzahl. /Ernst *) geht auch nicht immer, manche Bewässerungspumpen für Solarbetrieb haben einen MPPT integriert...
richtig Und jede Menge Verluste im Eisenkern des Motors hast du auch, wenn du versuchst den mit fast 100kHz umzumagnetisieren. ..zum 3tten oder 4ten mal es hiess einmal...etwa so : kartago delenda est ;-)
Hallo, >jede Menge Verluste im Eisenkern des Motors hast du auch, wenn du >versuchst den mit fast 100kHz umzumagnetisieren. Das kann man so verallgemeinert aber nicht behaupten. Ein und dieselbe Induktivität mit einer höheren Frequenz betrieben kann sogar den Anteil der absoluten Eisenverluste senken, weil nämlich die Magnetisierungskurve nicht so stark ausgefahren wird und man sich evtl. weiter vom Sättigungsknick entfernt befindet. Das größere Problem ist, dass dadurch die Ausschwingvorgänge stärker ins Gewicht fallen als bei kleineren Frequenzen. Dieter
Nur eine Vermutung - könnte man nicht einen Frequenzteiler vor den MOSFET schalten, sollte es doch besser laufen?
Meines erachtens bildet sich der Schwingkreis durch die Motorinduktivität und der Drain-Source-Kapazität aus. Die Sperrkapazität der Freilaufdiode spielt wahrscheinlich auch noch mit rein. Schon mal mit einem anderen MOSFET-Typ probiert der eine geringere Drain-Source-Kapazität aufweist? Zum Testen könnte man auch zwei gleiche Typen mit den Drain-Source-Strecken in Reihe schalten. dadurch halbiert sich die besagte Kapazität. Vielleicht hilft es auch durch eine Diode in der Drain-Source-Richtung den Freilaufstrom durch die Body-Diode des FETS zu sperren und stattdessen eine Freilaufdiode nah an dem Motor zu verschalten.
@ Avr Nix (avrnix) >Nur eine Vermutung - könnte man nicht einen Frequenzteiler vor den >MOSFET schalten, sollte es doch besser laufen? Dann läuft er konstant mit 50%, weil üblicherweise ein Frequenzteiler die (hier unangenehme) Eigenschaft hat, das Tastverhältnis auf exakt 50% einzustellen aufgrund dessen Wirkprinzips. @ Dieter Stotz (Gast) >>jede Menge Verluste im Eisenkern des Motors hast du auch, wenn du >>versuchst den mit fast 100kHz umzumagnetisieren. >Das kann man so verallgemeinert aber nicht behaupten. Ein und dieselbe >Induktivität mit einer höheren Frequenz betrieben kann sogar den Anteil >der absoluten Eisenverluste senken, weil nämlich die >Magnetisierungskurve nicht so stark ausgefahren wird und man sich evtl. >weiter vom Sättigungsknick entfernt befindet. Ja, gut. Bei einem Motor vielleicht nicht so relevant. Den Skineffekt in der Motorwicklung sollte man aber schon mit in Betracht ziehen, denn der dürfte schon recht stark zuschlagen bei 100kHz.
Es handelt sich übrigens immer noch um einen Brushless Motor mit integrierter Regelung. Nur falls es jemand nicht mit bekommen hat :P
Also D. G-s (mandrake) hat recht. Jedoch würde ich mich um dein Schwingen nicht allzu grosse gedanken machen, weil es höchst unwahrscheinlich ist das dadurch Probleme entstehen. Schliesslich sieht man ganau das gleiche Signal bei jedem DC/DC Wandler.
Es handelt sich übrigens immer noch um einen Brushless Motor mit integrierter Regelung. Nur falls es jemand nicht mit bekommen hat :P weiss Lutz das ?
Hallo, also ich schlage nochmals eine einfache alternative Lösung vor: Push-Pull-Treiber mit zwei komplementären MOS-FETs und einfachem Tiefpass am Ausgang -- das Ganze mit wenigen kHz betrieben. Dieter
Noch was zu den Oszi-Messungen: wenn mit 2 Tastköpfen (Probes) differentiell gemessen wird, heißt das noch lange nicht, dass man die nicht auch sauber (kurz und am selben Punkt) erden muss. Hatten wir vor kurzen schon mal: Beitrag "Störungen vom DCDC-Wandler" gilt genauso für diese Differentialmessung. Erst bei der Verwendung eines speziellen Differential-Tastkopfes ist man das Gnd-Problem los (aber nicht das Zuleitungsproblem zu den Tips). Eine Current-Probe wäre hier ebenfalls sehr hilfreich. Ich würde ebenfalls den Step-Down-Betrieb mit LC-Ausgang vorschlagen. Es muss nicht unbedingt eine Push-Pull-Ansteuerung sein. Die Diode übernimmt ja den Stromfluss, wenn der T nicht leitet. Der Strom in der Speicherspule fließt ja immer in die selbe Richtung. Es muss unbedingt eine gleichstromfeste Speicherspule sein, keine Entstördrossel!
@Dieter Stotz (Gast) >also ich schlage nochmals eine einfache alternative Lösung vor: >Push-Pull-Treiber mit zwei komplementären MOS-FETs und einfachem >Tiefpass am Ausgang -- das Ganze mit wenigen kHz betrieben. meinst du, daß das wirklich so gut ist? Damit machst zwar sicher eine bessere Kennlinie (Abhängigkeit der Drehzahl vom Tastverhältnis im Leerlauf). Aber damit vernichtest Du die ganze Energie wieder, die einmal im Motor in Form mechanischer Drehbewegung steckt. D.h., Wirkungsgrad dürfte dürftig werden. Abgesehen davon, daß sowas explizit zum Bremsen gemacht wird, glaube ich sonst nicht, daß dies wirklich auch in der Leistungselektronik üblich ist.
Diesen Rückschlagimpuls betrachte ich nicht als die in el. Energie überführte Rotationsenergie des Motors. Sie kommt vielmehr von seiner Streuinduktivität. Da der Motor nach den ganzen Postings anscheinend nur vernünftig mit einer Gleichspannung zu steuern ist, bleibt gar nichts anderes übrig, als ihm diese auch zu liefern. Und der Tiefpass verhindert ja letztendlich, dass die Motorspannung immer auf Null zurückgeht. Als LC-Glied ausgeführt wird er im Idealfall auch keine Verluste haben. Im übrigen ist diese Methode in der Leistungselektronik sehr wohl üblich -- siehe z. B. Class-D Audio-Leistungsverstärker. Gruß Dieter
Klar, ein class-D Verstärker muß ja die Lautsprechermembran permanent vor- und zurückbewegen, deshalb braucht man auch einen solchen Gegentaktausgang (auch, um evtl. ein gewisses Eigenleben der Memran zu unterdrücken, muß man auch mal gegensteuern können - da kommts auf Exaktheit an). Das kann man aber nicht mit einem Motor vergleichen, der erstmal einfach nur in eine Richtung drehen soll. Wenn Du den wirklich it PushPull ansteuerst, dann heist das ja, daß der eine Halb-Takt ihm Schub gibt, und der zweite (Gegen-)Takt ihn extra bremst, weil er seine Wicklung kurzschließt. Da wird nicht einfach nur die Spitze der Streuinduktivität kurzgeschlossen wie es eine normale Diode da tun würde, sondern da wird dessen Generatorspannung (oder wie man das so nennt) kurzgeschlossen, die von seiner Drehbewegung kommt.
Moin, ein kurzer Erfahrungsbericht aus dem Bereich der PC-Lüfter: Die Motoren sind allesamt "bürstenlose DC-Motoren", also mit eigener Steuerelektronik. Ferner reagieren sie auf Gleichspannung alle wie ein konventioneller Gleichstrommotor. Auf PWM (wir haben damals - auch wegen vorgegebenem Controller - mit IIRC etwa 19kHz gearbeitet) reagieren die Lüfter sehr unterschiedlich. Manche lassen sich einigermaßen steuern, viele sogar ganz gut, etliche aber auch gar nicht (bis 80% Tastverhältnis Stillstand, ab 80% Tastverhältnis etwa Maximaldrehzahl) Letzendlich sind wir dann doch auf Linear-Endstufen "zurück" gegangen (deren Eingänge per PWM und RC-Tiefpass eingestellt werden) MfG, Heiko
Hallo, was heißt Exaktheit bei der Lautsprechermembran? Ich will bloß aus einer PWM eine Gleichspannung machen, ob das zu beiden Polaritäten oder nur für eine Polarität geschehen soll, ist doch zweitrangig. Vielleicht habe ich mich nicht klar ausgedrückt, aber der LC-Tiefpass verhindert, dass der Motor bei einem Schaltzustand der PWM stark abbremst. Der Tiefpass macht aus der PWM eine Gleichspannung. Und es gibt keinen "Kurzschluss". Mit jedem anderen, normalen Bürstenmotor hätte ich auch Eintakt-Ansteuerung verwendet, etwa so, wie dies der PWM-Steller von Pollin tut. Aber das hier verwendete Modell benötigt anscheinend eine echte Gleichspannung, die man drosselt. Im Gruunde ist das, was ich beschrieben habe, auch nichts anderes als ein Stepdown-Wandler, eben als Gegentakt-Stufe aufgebaut. Dieter
Bitte melde dich an um einen Beitrag zu schreiben. Anmeldung ist kostenlos und dauert nur eine Minute.
Bestehender Account
Schon ein Account bei Google/GoogleMail? Keine Anmeldung erforderlich!
Mit Google-Account einloggen
Mit Google-Account einloggen
Noch kein Account? Hier anmelden.