Hallo, bin absoluter Anfänger und ja, ich habe gelesen, dass PWM die bessere Motorsteuerung sei. Möchte trotzdem eine Gleichstromsteuerung aufbauen. Gedacht habe ich mir das so, dass ich 7 Pins mit einem Widerstandsgrab verbinde und den 8ten als Richtungssteuerung verwende. Als Treiber will ich einen BD137 einsetzen. Der Motor stammt aus einem alten Tintendrucker und war dort für die Positionierung des Druckkopfes zuständig. Konnte leider keine Daten ausfindig machen, aber an 12V gehalten dreht er sich sehr gemächlich (vermutlich wird er 24V, 30V oder gar mehr benötigen - für den Test bin ich mit 12V zufrieden). Womit ich noch nicht ganz klar komme ist die Umpolung. Ich habe von den analogen Schaltern (z.B. 74*4053) gelesen, jetzt vermute ich mal, dass die zwar für analoge Wechselspannung geeignet sind, wahrscheinlich aber nicht für Gleichspannung. Könnte mir jemand helfen, wie ich das Vorhaben umsetzen kann? Möchte mit den 8 Pins eines Ports für die Steuerung auskommen. Freue mich auf jeden Hinweis. Ach so, ja - das ganze soll mit einem ATmega funzen. Gruß Santi
Das mit deiner Ansteuerung verstehe ich nicht, deshalb kein Kommentar. Zur Richtungsumkehr: Suche mal im Forum nach H-Brücke. 4053 kann zwar auch DC schalten, aber keine Motoren (außer vielleicht einem Spielzeug-Solar-Motor)
>Gedacht habe ich mir das so, dass ich 7 Pins mit einem Widerstandsgrab
Was soll das heißen?
Was sollten die Widerstände bewirken?
Willst du damit ein R2R-Netzwerk aufbauen?
Oder hast du die als "Vor"-Widerstände für deinen Motor gedacht?
Ansonsten:
Umpolen->siehe H-Brücke
Hallo, Danke für Eure Antworten! Vielleicht hätte ich dazu schreiben sollen, dass es mir primär nicht um die Motorsteuerung geht, sondern darum, ein Verständnis für Hardware, insbesondere für das Zusammenspiel von digitalen und analogen Bauteilen zu entwickeln. Ich stehe vor der Entwicklung meiner ersten Platine(n) und habe schon so einiges gelesen. Manche Fragestellungen konnte ich dagegen nicht aufbrechen, deshalb hier meine Frage nach Unterstützung. @HildeK: zu meiner Ansteuerung: Ich habe jeweils einen halben Port auf einen 10pol Wannenstecker gelegt und möchte die Motorsteuerung mit einem Port hinbekommen, da ich noch mehr vorhabe. Ja und 3 10pol-Kabel zwischen Steuer- und Treiberplatine sind mir zu viel. Ich weiß, dass L297/L298 das ganze mit weniger Pins erledigen - nur hätte ich dann eine Software-Aufgabe und ich möchte mich eben mit Hardware beschäftigen, bzw. das eben lernen. Deshalb wollte ich auch einen Transistor als Treiber nehmen. Auch wenn ich prinzipiell weiß, wie man einen Transistor einsetzt, scheitere ich doch oft an der Dimensionierung - habe hier also meinen größten Lernbedarf (ja, ich kenne Elektronik-Kompendium. Mir fehlt allerdings der Mittelteil der Erklärung. Es wird schnell von trivial zu komplex gewexelt, ohne dass ich einen Weg fand, wie man von Einem zu Anderen kommt). Wenn der 4053 auch DC schalten kann, könnte ich doch die Emittersteuerung schalten (von einem Transistor auf den anderen) und so eine Umpolung erreichen? Also unter DC analog schalten verstehe ich, wenn mein Eingang 3,97 Volt bei 5V VCC hat und ich einen Ausgang beschalte, dass ich dort auch 3,97 Volt vorfinde?!? Von H-Brücken (L293 ?) habe ich schon gelesen - für mich ist das ein 4fach Verstärker. Viele haben ein Enable dabei, aber mir ist nicht klar, wie ich mit einem Pin letztlich die Richtung des Motors ändern kann. @ARM-Fan: Jo - Ich bin beim Lesen über R2R immer wieder drauf gestoßen, dass man es als Widerstandsgrab bezeichnet hat. Dachte dann verwende ich gleich den deutschen Begriff. Wie oben erläutert geht es mir nicht darum, möglichst effizient einen Motor zu steuern, sondern ich möchte etwas über Hardware und deren Zusammenspiel, bzw. Dimensionierung lernen. Vielleicht habe ich bei den H-Brücken ja etwas übergelesen, sodass mir ein Aspekt entgangen ist. Werde mich also nochmal auf die Suche begeben...
Lies dich mal in das Thema H-Brücke ein, Wikipedia bringt beispielsweise das hier: http://de.wikipedia.org/wiki/Vierquadrantensteller Dann sollte dir auch klar sein, wie du mit dem L293 und Konsorten umgehen musst. Deine Auffassung von "analog" solltest du ebenfalls überdenken. Es heißt nichts anderes, als dass es keine begrenzte Anzahl von Zuständen gibt, sondern einen kontinuierlichen Wertebereich. Und diesen kannst du nutzen, allerdings nicht nach dem Motto "Ich gebe die Spannung in den Transistor und bekomme die dabei raus", denn ein bipolarer Transistor ist stromgesteuert und lässt dadurch einen größeren Laststrom über C-E fließen. Hast du dir mal die Kennlinienfelder beim Elektronik-Kompendium angeschaut? Wenn ja, was genau verstehst du denn nicht?
Hallo Erik, danke für den Link. Offensichtlich scheint H-Driver nicht das gleiche wie H-Brücke zu sein. Das Problem war also ein Übersetzungsfehler :/ Ok - das analog nicht nur Spannung alleine ist, hab ich inzwischen auch kapiert. Wie formuliert man es dann richtig, wenn man eine bestimmte Spannung bei bestimmtem Strom und Widerstand meint? Für mich war es so, dass man die Geschwindigkeit eines DC-Motors über die Spannung regelt. Wenn man jetzt den statischen Zustand ansieht und den Widerstand der Spule als konstant ansieht, steigt natürlich zur Spannung auch der Strom. Gedanklich bin ich so davon ausgegangen, dass wenn ich digital vom µC auf einen DAC gehe (R2R) steuere ich damit eine Spannung. Zur Ansteuerung eines Transistors brauche ich dann trotzdem noch einen Vorwiderstand, um den Strom zu begrenzen, bzw. einen Spannungsteiler um den Arbeitspunkt zu bestimmen. Was ich mit analoger Schaltung meinte, bezog sich nicht auf den Treibertransistor, sondern auf den 4053. Wenn ich Deinen Einwand jetzt richtig interpretiere, kann ich nicht den Ausgang des DACs schalten, sondern müsste die 7 Pins vor dem DAC schalten? Also bräuchte ich 3x 4053er, 4x DAC und 4 Treibertransistoren? In der Reihenfolge dann: Die 7 Pins der Geschwindigkeit auf die Eingänge der 4053er, den Richtungs-Pin an alle "Digital-Select-Input"-Pins der 4053er. Die Ausgänge der 4053er gehen dann an die jeweiligen R2R-DACs und von dort an den Emitter der Transitoren? Habe ich das so richtig verstanden?
Ok, nochmal alles gründlich gelesen und hoffentlich verstanden, was genau du machen willst. Bei solcherlei Fragen ist ein Schaltplan oder zumindest Blockschaltbilder sehr hilfreich und vermeidet Missverständnisse. Du willst also über einen Port und ein Widerstandsnetzwerk einen DA-Wandler bauen, der über einen Transistor einen Motor ansteuern soll (variable Drehzahl und umkehrbare Drehrichtung). Der 4053er war als Alternative zum Transistor gedacht, richtig? Ist das nicht ein Multiplexer, oder täusche ich mich da? In jedem Fall solltest du einen etwas leistungsfähigeren Transistor nehmen und dem einen kleinen Kühlkörper spendieren, sonst wird er nicht lange mitspielen. Da ich mir beim Rest nicht sicher bin, wie genau du es meinst, sage ich erstmal lieber nichts weiter dazu.
Achso, die Motordrehzahl lässt sich natürlich über die Betriebsspannung ändern, leider nur in gewissen Bereichen linear und auch nur unbelastet. Aber in einfacher Näherung kann man es schon so ansehen.
Hallo, weißt Du, was ich früher gemacht habe? Ich habe es ausprobiert... Die Spannung statt per R2R per Poti erzeugt, den Transistor und den Motor und was sonst Deiner MEinung nach nötig ist, zusammengelötet und eingeschaltet. Läßt sich die Drehzahl wie geünscht regeln? Raucht der Transistor gleich ab, weil der Motorstrom viel höher als erwartet ist? Lerneffekt: erstmal die Motordaten irgendwie feststellen oder wenigstens grob ausmessen.. Raucht er später ab, weil die Verlustleistung bei halber Drehzahl viel zu hoch ist? Lerneffekt: U=I*R und P=U*I gelten auch bei Transistoren... Schlägt der Transistor gleich oder später durch, weil die Induktionsspannung eines kommutator-Motors merklich höher als die 12V sein kann? Lerneffekt: man kann mit 12V und einem Motor auch schöne Elektrisiergeräte bauen... usw. usw. usw. Ist wirklich nicht böse gemeint, aber so teuer sind solche Teile nicht, Spaß macht es auch und ein Erfolgserlebnis bekommt man durchaus auch in kurzer Zeit hin. :-) Irgendwie hat sowas zu Zeiten vor Internet, Simulationssoftware usw. mehr Spaß gemacht und war weit weniger trocken und theoretisch. Ansonsten basteln wir hier jetzt eine Motorsteuerung zusammen und hinterher weiß Du nichtmal, warum sie spielt. Gruß aus Berlin Michael
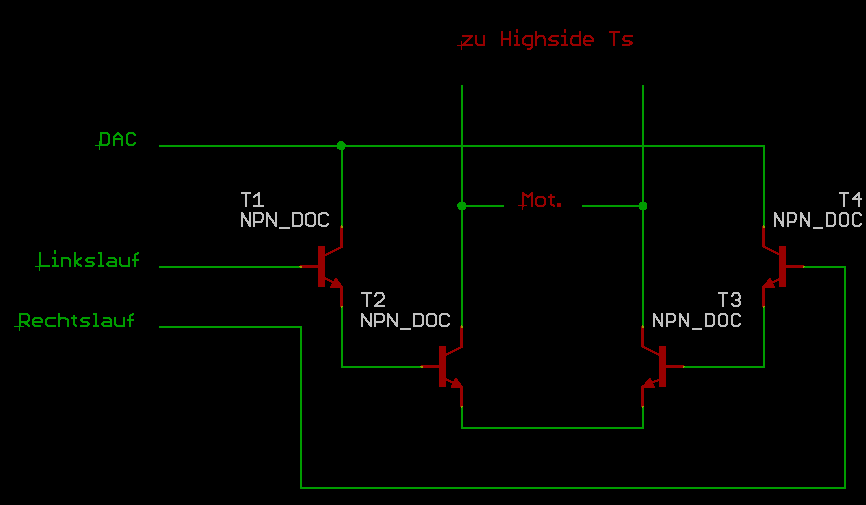
Angehängte Dateien:
-

DC-Driver.png
10 KB
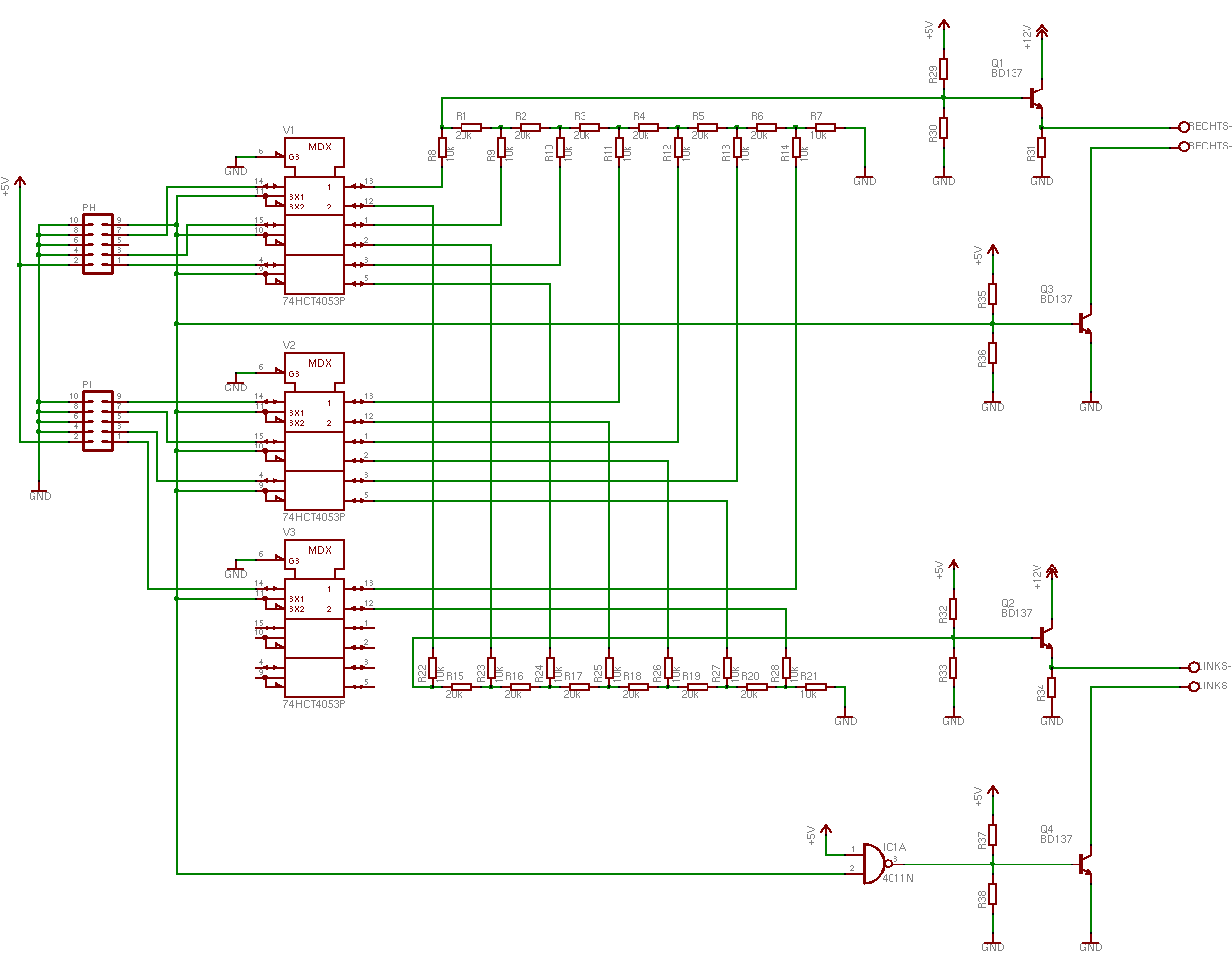
Hallo und danke für Eure Aufmerksamkeit. @Michael > Ansonsten basteln wir hier jetzt eine Motorsteuerung zusammen und > hinterher weiß Du nichtmal, warum sie spielt. Genau das will ich nicht. Wenn Du meine Posts liest, findest Du, dass ich was lernen möchte (wenn auch nicht durch Teile verbraten). ... und gegen theoretisches Lernen habe ich nix einzuwenden. > Lerneffekt: erstmal die Motordaten irgendwie feststellen oder wenigstens > grob ausmessen.. Ich hatte geschrieben, dass ich zu dem Motor keine Daten finden konnte. OK - ausgemessen hatte ich net - jetzt nachgeholt: die Spule hat 34 Ohm. An 12 V ergibt das 350 mA. Wie das mit Wirbelströmen und Verlustleistung aussieht weiß ich nicht, der BD137 verträgt laut Datenblatt 60V und 1,5A habe jetzt kein Gefühl, ob das knapp wird. Zur Not hätte ich noch ein paar BD245er in der Restekiste. @Erik Du hast völlig recht - ein Bild sagt mehr als tausend Worte. Habe mal eine Skizze angehängt - nur zur Erklärung, wo ich ungefär hinwill. Die Linearität des Motortreibers oder der Drehzahleinbruch unter Last interessiert mich im Moment auch nicht. Die Motorsteuerung ist ein kleiner Teil eines Regelungswerkes, welches ich mir als Übungsaufgabe gestellt habe. Wie gesagt, die Richtungssteuerung soll mit einem Pin gehen. Weiß jetzt nicht, ob das so paßt - insbesondere bei den Transistoren weiß ich nicht, ob ich das richtig verstanden habe. Michael hat mich jetzt schon etwas verunsichert. Meinst Du eine Freilaufdiode reicht zur Absicherung oder muss ich was grundlegend ändern? Einen schönen Abend wünscht Santi
Angehängte Dateien:
-

DC-Driver.png
9,8 KB
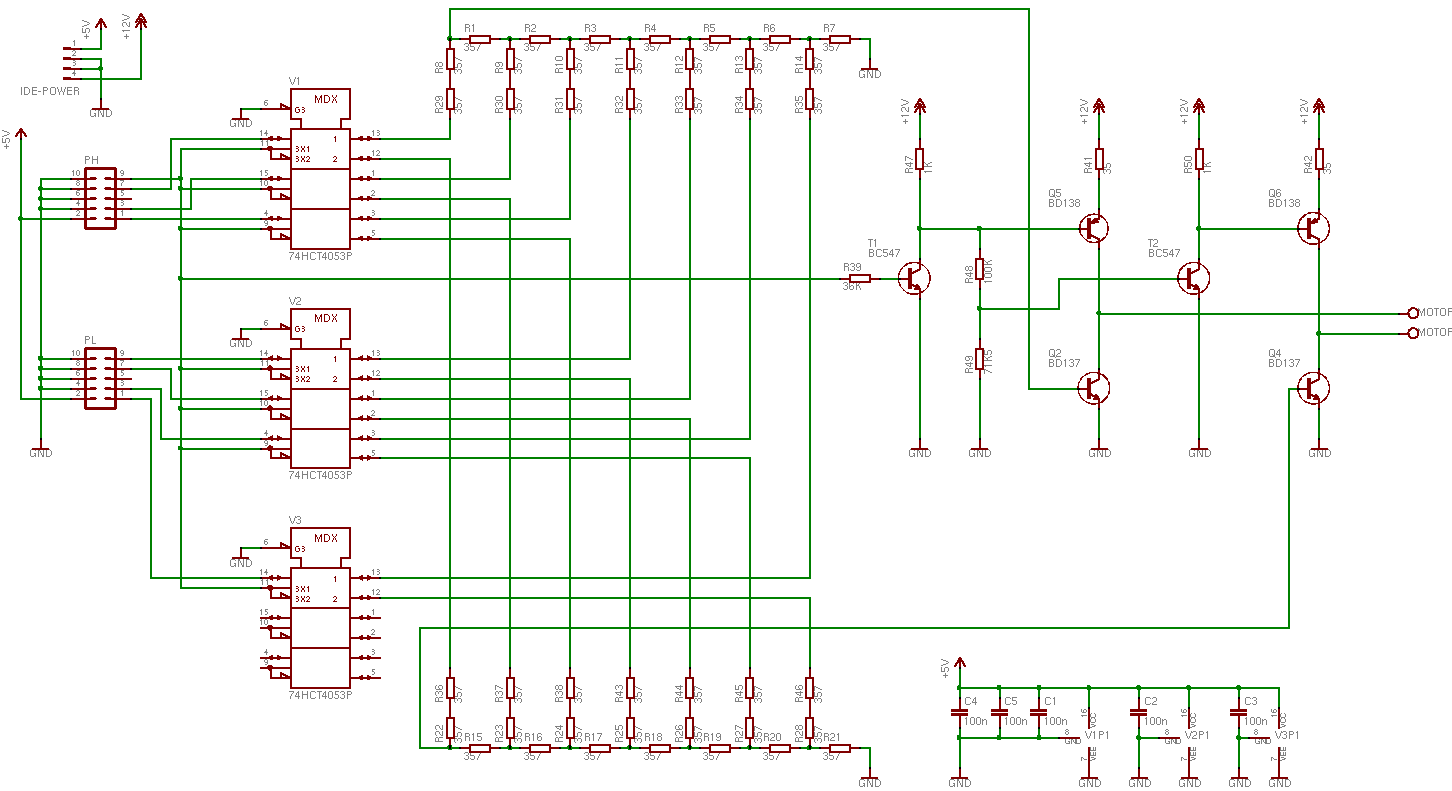
Ein neuer Versuch. Habe versucht, die Widerstände zu berechnen. Wie bereits erwähnt, hat die Spule des Motors einen Widerstand von 34Ohm und soll mit 12V betrieben werden. Wenn jemand die Schaltung mal kontrollieren könnte wäre ich für Rückmeldung sehr dankbar. Was mir jetzt noch fehlt ist ein Weg, wie ich die Freilaufdioden unterbringe. Die sollen ja auch wechselseitig aktiv sein. Auch hier wäre ich für Hinweise dankbar. Gruß Santi
Ich habe mir deine Schaltung grade nicht genauer angeschaut, mache ich bei Gelegenheit. Allerdings ist mir aufgefallen, dass du für die H-Brücke 4xNPN-Transistroren einsetzt. Das wird so wohl nicht gehen, da die Spannung zwischen Basis und GND der oberen Transistoren ja 12V+U_BE sein muss. Deshalb werden i.d.R. für die oberen Transistoren PNP verwendet, da erübrigt sich das Problem. Alternativ könnte eine höhere Hilfsspannung, z.B. von einer Ladungspumpe erzeugt, genutzt werden. Ist aber deutlich mehr Aufwand.
Angehängte Dateien:
-

DC-Driver.png
11 KB
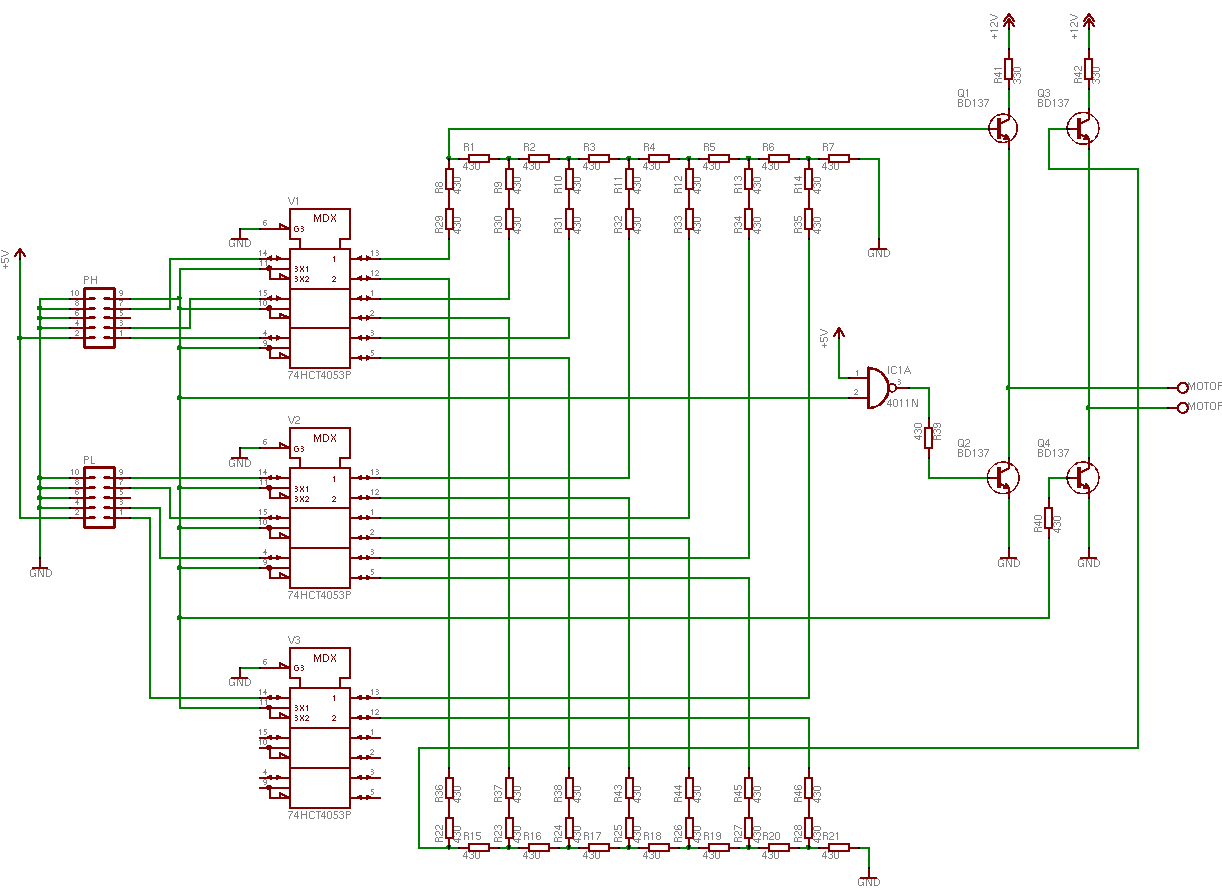
Hallo, > Allerdings ist mir aufgefallen, dass du für die > H-Brücke 4xNPN-Transistroren einsetzt. Das wird so wohl nicht gehen, da > die Spannung zwischen Basis und GND der oberen Transistoren ja 12V+U_BE > sein muss. Das verstehe ich leider überhaupt nicht. Nach meinem Verständnis sind die jeweils oberen Transistoren als analoge Verstärker aktiv, während die unteren Transistoren als Schalter angesteuert werden. Bei der Ansteuerung sollte sogar die Spannung über dem Kollektor-Widerstand vernachlässigbar sein. Warum und wo fällt die U_BE-Spannung von den 12V ab? Hättest Du mir eine Erklärung oder einen Link der sich mit der Thematik auseinander setzt? Was ich noch weniger verstehe: wenn man den Transistor gegen einen PNP austauscht - warum fällt die U_BE-Spannung nicht mehr ab? Was ist jetzt anders? Anyway! - Habe mal einen neuen Plan gepinselt. Ist der jetzt besser/richtiger? Gruß Santi P.S. Verstehen würde ich schon gerne, warum und was jetzt besser sein soll.
Es wird schon!!! PNP bei den High-Side Ts sind empfehlenswert, hast du aber eh schon geändert. Ich würde die Oberen Ts schalten, und die unteren analog ansteuern. Du bekommst nämlich aus deinem R2R Netzwerk nur 0-5V heraus. Damit die PNPs anzusteuern, die ja auf +12V hängen, bringt nix. Überleg dir einfach den Weg des Basisstroms, und die zugehörigen Spannungen. Also: Oben schalten, und unten mit R2R steuern. Ich wage auch noch zu behaupten, dass du aus dem 10k Netzwerk genug Basistrom für die NPNs bekommst. Da ist evt. noch eine Treiberstufe (zB OPV LM358) notwendig. lg, Karl
Ok, dann werde ich mich mal an einer Erklärung versuchen. Wir betrachten der Einfachheit halber die durchgeschalteten Transistoren als ideal leidend. Der Strom fließt über den Highside-Transistor über den Motor und anschließend über den Lowside-Transistor. Am Motor fallen dabei die 12V gegenüber GND ab. Dieses Potential liegt logischerweise ebenfalls am Emitter des HS-Transistors an. Um diesen leiten zu lassen, ist eine Basis-Emitter-Spannung von größer ca 0,6...0,8V nötig (je nach Typ unterschiedlich, hab jetzt nicht nachgeschaut). Verdeutliche dir, dass dies die Spannung zwischen Basis und Emitter ist! Da der Emitter auf einem Potential gegen GND von 12V liegt, musst du die Basis-GND-Spannung auf größer 12,6...12,8V auslegen. Alles bezogen auf NPNs als Highside-Transistoren! Darf ich ganz indiskret fragen, wie alt du bist? Nachtrag: Beim PNP-Transistor fließt der Basisstrom zwar auch über die BE-Strecke, jedoch liegt hier dann der Motor nicht im Basisstromkreis, wie es bei Verwendung von NPN der Fall wäre.
Angehängte Dateien:
-

DC-Driver.png
11 KB
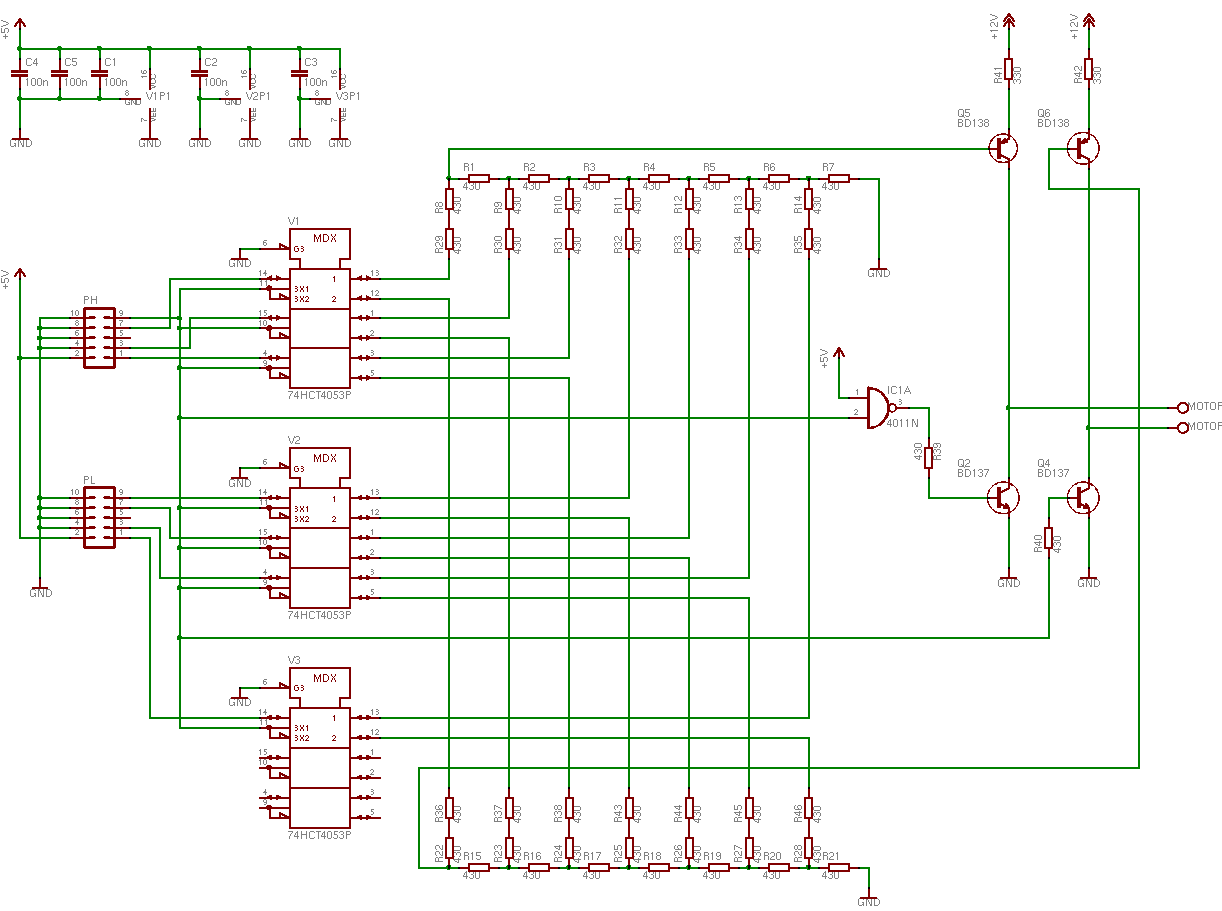
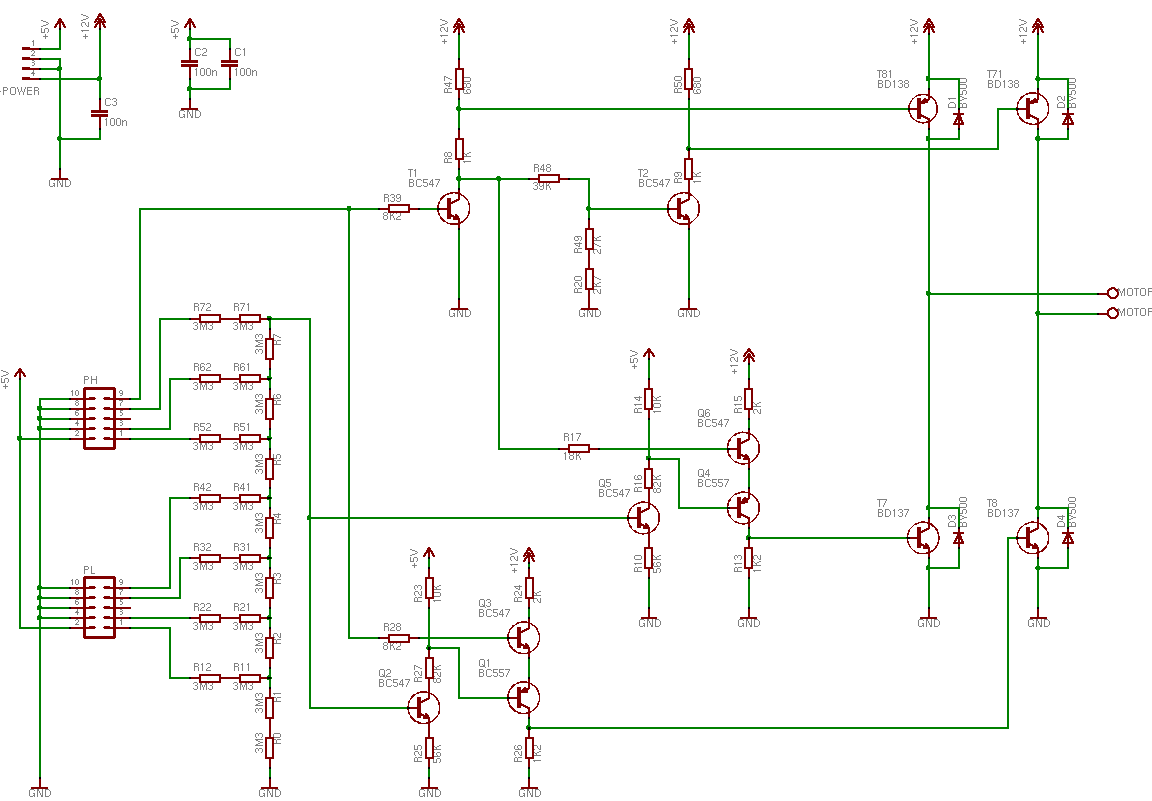
Auf ein Neues :) Hallo zusammen, ich saß wirklich zu fett auf der Leitung. Habe Eure Erklärungen mindestens 10mal wiedergekäut, Tutorials durchforstet und ... ... jetzt endlich ist der Knoten geplatzt :) Habe versucht, alle Radschläge zu beherzigen und im Anhang findet Ihr das Ergebnis. > Es wird schon!!! Danke für die ermutigende Feststellung! > Überleg dir einfach den Weg des Basisstroms, und die zugehörigen Spannungen. Danke fürs mit der Nase draufstupsen. Hätte selbstverständlich sein sollen ... Schätze ich war zu gedankenlos. > Verdeutliche dir, dass dies die Spannung zwischen Basis und Emitter ist! Da > der Emitter auf einem Potential gegen GND von 12V liegt, musst du die > Basis-GND-Spannung auf größer 12,6...12,8V auslegen. Ich war so komplett vernagelt - dachte die ganze Zeit: wovon redet der Mensch bloß ... Vor lauter Sturheit hatte ich den Blick für's Ganze verloren. Habt Dank für Eure Geduld! Vielleicht sind die Tutorials ja auch etwas zu oberflächlich an der Ecke. Meist liest man Erklärungen zu NPNs in aller epischen Breite und wenn's dann zu den PNPs kommt, heißt es meist: genau wie bei NPN nur Vorzeichen drehen. Also für mein Verständnis ist/war das zu wenig. Ok, damit Ihr meine geistigen Blähungen auch nachvollziehen könnt, bescheibe ich kurz, wie ich gerechnet habe: Den DC-Motor habe ich mit einem Multimeter durchgemessen - Spule hat 34 Ohm. Da ich die ganze Testschaltung mit einem ausgedienten PC-Netzteil bedienen will, ist bei 12V Schluss. 34 Ohm an 12 V ergibt einen Strom von 360 mA. Deshalb auch einen Kollektorwiderstand von 35 Ohm. Der BD137 hat einen (Mindest-)h_FE-Faktor von 63, d.h. ich brauche zum Ansteuern einen Strom von 6 mA. Wenn ich den Transistor direkt an einen Atmega-Pin anschließen würde, bräuchte ich als Vorwiderstand: (5V - 0,7V) / 6mA = 716 Ohm In Reihe E96 gibt es den Wert 715 Ohm. Ein R2R-Netz hat als Ersatzwiderstand 2R, d.h. ich brauche 357 Ohm (auch aus E96) als Einzelwiderstand für den DAC. Die zu schaltenden Transistoren (oben) bekommen einen 357 Ohm Widerstand, was einer Halbierung des berechneten Wertes darstellt. Sie sollten also sicher durchschalten. Bleibt noch die Berechnung von T1 (habe mir gedacht, für eine einfache Logik-Invertierung bräuchte ich keinen IC): Der BD137 braucht 6mA zu durchschalten. Der BC547 hat einen h_FE von ca. 100. Da er als Schalter fungieren soll, also die Hälfte davon - 50. Der BC547 muss also mit 0,12mA angesteuert werden. (5V - 0,7V) / 0,12mA = 36 kOhm Wenn ich mich nicht grob verrechnet habe, sollte es möglich sein, diese Ströme mit dem AVR direkt zu realisieren. Völlig unberücksichtigt ist hierbei natürlich das dynamische Verhalten. Wenn mir jemand auf die Spur helfen könnte, dies auch noch mit zu berechnen, wäre ich sehr dankbar. > Darf ich ganz indiskret fragen, wie alt du bist? Alt. Sehr alt. So alt, dass die Auslagerungsdatei, in der sich das Wissen über Elektronik im weitesten Sinne befand, schon mehrfach überschrieben wurde :) Ich hoffe mal, dass ich ob meines Alters jetzt nicht des Forums verwiesen werde :/ Gruß Santiago P.S. Für ein Fiedbäck zu meiner ultimativen Motorsteuerung :) und deren Berechnung wäre ich Euch sehr verbunden.
So, wie Du es jetzt gezeichnet hast, wird Q5 niemals leitend, da Du seine Basis auf +12V festgenagelt hast. Und solange Du mit dem Steuersignal an Q6 nicht auf mindestens 11,xxV raufkommst, wird Q6 nicht sperren. Gruß, Peter
Hallo Peter, danke für Deine Aufmerksamkeit. Ok - erwischt. Q6 habe ich gepennt. Würde das mit Q5 klappen, wenn ich den 1K-Widerstand oberhalb des Transistors plazieren tun täte und die Basis zwischen Transistor und Widerstand abgreife? Gruß Santi
Angehängte Dateien:
-

DC-Driver.png
12 KB
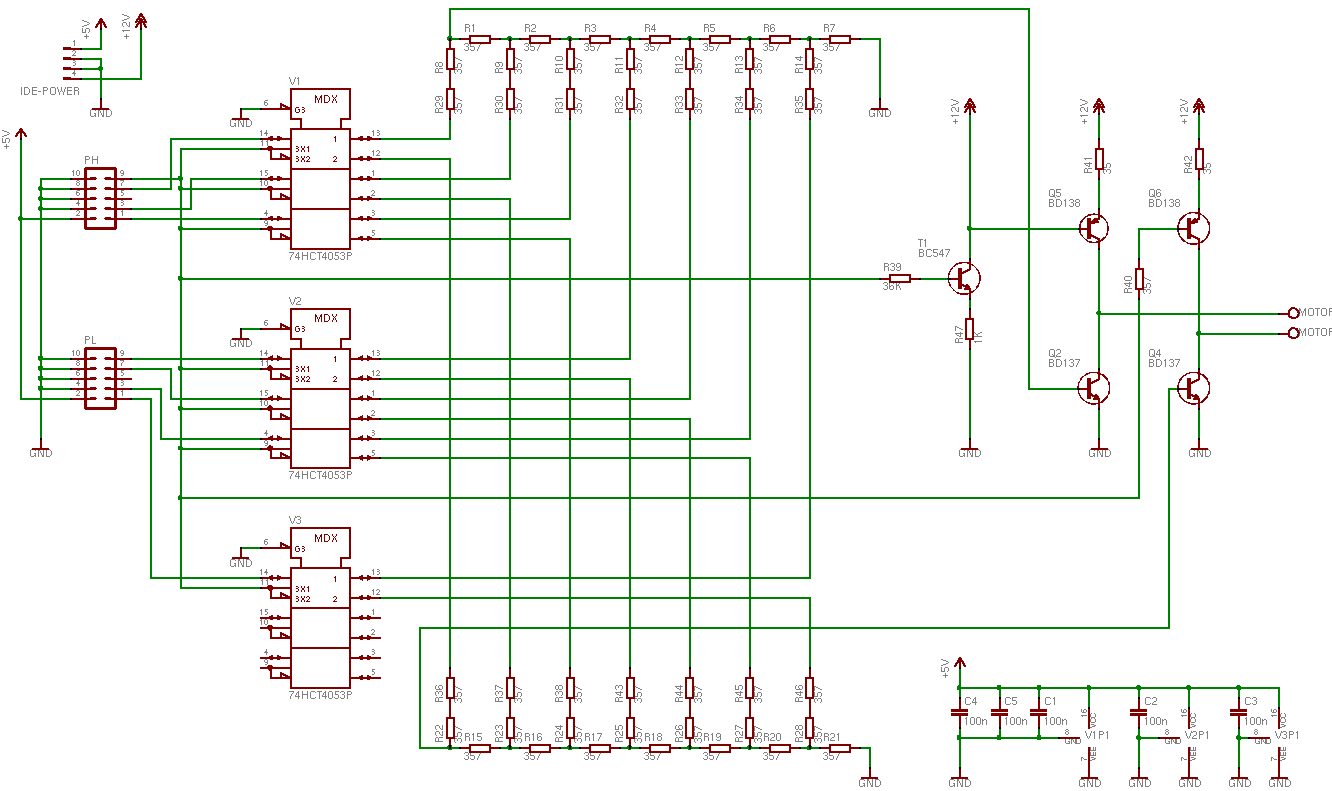
In der Hoffnung auf der richtigen Fährte zu sein, hier ein neuer Versuch.
Wunderbar. Es fehlt nun nicht mehr viel. Deine Berechnungen klingen plausibel, bis auf das, dass du mit der E96er Reihe arbeitest. Nimm E12, ist realistischer. R41 und R42 musst du weglassen, oder evt. auf 1 Ohm verringern. Die nennen sich Emitter-Gegenkopplungs-Rs. Die sind beim schalten nicht unbedingt von allzugroßer Bedeutung. Diese 35 Ohm hat ja dein Motor, weswegen die R41 und R42 nicht so groß sein dürfen, weil somit zu wenig Spannung für den Motor übrig bleibt. Du willst ihn ja mit 12V und nicht mit 6V betreiben. Die Abwechselnde Durchschaltung der High-Ts hast du dir nun sehr schön überlegt. Gratuliere! Nun kannst du dir noch überlegen, wie du evt. mit einem DAC auskommst. 2 davon müssen ja wirklich nicht sein. Als Tipp: Nimm je einen NPN, um das analoge Signal immer nur auf eine der Basen durchzuschalten. Q5 sowie Q6 braucht auch noch einen Basis-Vorwiderstand, da ja T1 und T2 durchschalten!! Das R2R Netzwerk könntest du aus Stromspargründen noch etwas hochohmiger machen, und dafür noch einen Treiber hintnach. Das wären meine Vorschläge. Alles Gute, Karl
An. Fänger wrote: >> Überleg dir einfach den Weg des Basisstroms, und die zugehörigen Spannungen. > > Danke fürs mit der Nase draufstupsen. Hätte selbstverständlich sein > sollen ... > Schätze ich war zu gedankenlos. > >> Verdeutliche dir, dass dies die Spannung zwischen Basis und Emitter ist! Da >> der Emitter auf einem Potential gegen GND von 12V liegt, musst du die >> Basis-GND-Spannung auf größer 12,6...12,8V auslegen. > > Ich war so komplett vernagelt - dachte die ganze Zeit: wovon redet der > Mensch bloß ... > Vor lauter Sturheit hatte ich den Blick für's Ganze verloren. > > Habt Dank für Eure Geduld! > Bitte, gerngeschehen. Ich kenne das nur zu gut, dass man sich an etwas so festbeißt, dass man das eigentlich offensichtliche nicht erkennt. Außerdem, wer ordentliche Fragen stellt bekommt auch ordentliche Antworten, wir sind ja keine Unmenschen hier... >> Darf ich ganz indiskret fragen, wie alt du bist? > > Alt. Sehr alt. So alt, dass die Auslagerungsdatei, in der sich das > Wissen über Elektronik im weitesten Sinne befand, schon mehrfach > überschrieben wurde :) > > Ich hoffe mal, dass ich ob meines Alters jetzt nicht des Forums > verwiesen werde :/ > Alte Mensch? Bääääh! ;-) Nein, ich habe mich nur gefragt, ob ich es mit einem (Wieder-)Einsteiger mit... erweiterter Lebenserfahrung zu tun habe oder mit jugendlichem Nachwuchs. Erstes ist schön, ich denke man ist nie zu alt fürs Elektronikbasteln. Fall zwei hätte aufgrund der Annahme und direkten Umsetzung der Ratschläge mein Bild der "heutigen Jugend" aufgebessert, die mit steigender Tendenz vollkommen beratungsresistent zu sein scheint. Ich gehöre selbst noch fast dazu und rede schon über die Jugend - ist das bedenklich? Aber zurück zum Thema, mir fällt zu Karls Ausführungen nicht weiter ein, schaut alles soweit ganz gut aus.
Hallo, danke für Eure Hinweise und Anerkennung. Freut mich sehr, dass meine Bemühungen registriert werden. > Nun kannst du dir noch überlegen, wie du evt. mit einem DAC auskommst. Du machst mich fertig! Das war mein erster Ansatz. Ich wollte zwischen DAC und Transistoren umschalten. Deshalb fragte ich nach der Einsatzmöglichkeit des 4053. Eriks erster Beitrag hat mich dann verunsichert, sodass ich die 4053er vorgezogen und die DACs verdoppelt habe. Puh - das muss ich erstmal verdauen :) > ... ob ich es mit einem (Wieder-)Einsteiger ... Das "wieder" könnte sich höchstens auf Elektrotechnik aus dem TG beziehen. Doch wie gesagt, die Auslagerungsdatei ist futsch. Nicht dass jetzt jemand denkt, ich täte damit eine Windozdatei meinen tun - mit nichten. War eher eine Anspielung auf die Internas meines Hirns ... Ansonsten habe ich mich bislang ausschließlich mit weicher Ware fernab aller harten Fakten bewegt ... :) Jetzt muss ich erstmal in mich gehen und ... ... melde mich wieder. Gruß Santi
Es muss ja nicht ein analog Switch sein. Du schaltest einfach mit einem NPN (je Halbbrücke) den (gemeinsamen) (Basis)strom vom DAC auf die entsprechenden Basis durch. Natürlich handelst du dir somit einen Fehler ein, ist aber nicht so tragisch, da es dir, wie ich gelesen habe, nicht um Präzision geht. Habs mal angedeutet, wie ich das meine. Um bei diesem Beispiel Dynamik zu berechnen, brauchts mehr, als nur ein paar Hinweise. Da stehe ich zugegebenermaßen auch an, bzw. lohnt sich meiner Meinung nach der Rechenaufwand nicht. Die unteren Ts könntest du noch mit einem OPV mit Spannungsrückkopplung (= -regelung) ansteuern, um wirklich die Spannung an dem Motor einstellen zu können, und Nichtlinearitäten bzw. BE-Schwellschpannung der Transistoren kompensieren. Wäre eine nette Sache, aber muss ja noch nicht sein. Ich finde es macht Spaß einem Eifrigen Einsteiger weiterzuhelfen, wenn er die Sache ernst nimmt, und auch eine vernünftige Diskussion mit ihm zu führen ist. PS: bin schon gespannt auf dein nächstes Schaltbild.
Hallo Karl, herzlichen Dank für Deine Mühen! > Es muss ja nicht ein analog Switch sein. Ich glaub, an dem Punkt bin ich inzwischen auch angekommen. Bin wohl auf dem besten Weg, den kompletten Motortreiber in analog zu machen. > ... da es dir, wie ich gelesen habe, nicht um Präzision geht. Entweder hab ich es falsch verstanden und/oder ich habe mich mistverständlich ausgedrückt. Ich hatte es so verstanden, dass der Motor keine lineare Charakteristik hätte. Bei der aktuellen Übungsaufgabe ist mir die Charakteristik des Motors ziemlich Banane. Der Motor treibt lediglich (indirekt) einen Sensor. Dessen Daten werden digitalisiert und für die Motor-Regelung verwendet. Schätze dass ich damit auch einen faulen Motor zu präziser Zusammenarbeit bewegen könnte. Bei dieser Übung ist nicht nur die Zusammenstellung der HW für mich eine Herausforderung - auch die µC-Programmierung ist Neuland für mich. Da gibt es dann auch einiges zum Ausprobieren. Es ist allerdings nicht richtig, dass mir die Genauigkeit des DAC's egal wäre. Die Motorsteuerung ist nur ein Fallbeispiel (ich habe als alte Naive noch einen Stepper), um das Prinzip und die Umsetzung eines möglichst schnellen DAC's zu lernen. Das DAC soll schon genau und vor allem schnell sein. Wenn es also Zugeständnisse in der Schaltung gibt, die die Genauigkeit oder Schnelligkeit beeinträchtigen, wäre ich für entsprechende Hinweise dankbar. Ebenso natürlich für Hinweise, wie man beides noch verbessern könnte. Ich weiß, dass beim DAC das höchstwertige Bit fehlerbehaftet ist. Dafür scheint es aber keine allgemeingültige Lösung zu geben. Mehr Fehler möchte ich mir ungern einhandeln. Wenn ich das ganze halbwegs verstanden habe, dann ist bei der Schaltung vom DAC doch "nur" der Strom von Interesse - weil ein Bipolar-Transistor über den Strom gesteuert wird. Vielleicht bringt eine Strom-Rückkoppelung zusätzliche Stablilität herein. > Ich finde es macht Spaß einem Eifrigen Einsteiger weiterzuhelfen, wenn > er die Sache ernst nimmt, und auch eine vernünftige Diskussion mit ihm > zu führen ist. Danke für die Blumen. Ich erfreue mich auch an der Diskussion mit Euch! Ein Punkt, der mir noch Bauchschmerzen bereitet sind die Induktions- und Fehlströme des Motors. Habe ja noch keine Möglichkeit vorgesehen/gefunden, diese abführen zu können. Habe mir heute ein Buch besorgt, in dem es auch um das Thema geht. Vielleicht verstehe ich ja etwas davon. Jetzt muss ich erstmal versuchen, Deine Anregung zu verstehen. Bin schon heftig am Knobeln, habe die Nuss aber noch nicht geknackt. Aba keine Sorge, der nächste Plan kommt bestimmt :D
Angehängte Dateien:
-

DC-Driver.png
12 KB
Hallo,
ich habe eine neue Variante fertig gestellt.
> Natürlich handelst du dir somit einen Fehler ein, ...
Meintest Du damit den "Fehler", dass zum Kollektorstrom der Basisstrom
addiert werden muss?
Falls ja, dann denke ich auf der richtigen Spur zu sein.
Hat etwas länger gedauert, das Ganze umzustellen - mir fehlt einfach
auch gedanklich die Routine. Habe mir immer wieder auf Papier die
Strompfade und Spannungen aufgezeichnet und nochmal nachgerechnet ...
... in der letzten Variante fand ich auch noch einige Rechenfehler ...
Hoffe mal, dass diese Version jetzt besser ist.
Schönen Abend wünscht Santi
Angehängte Dateien:
-

DC-Driver.png
11 KB
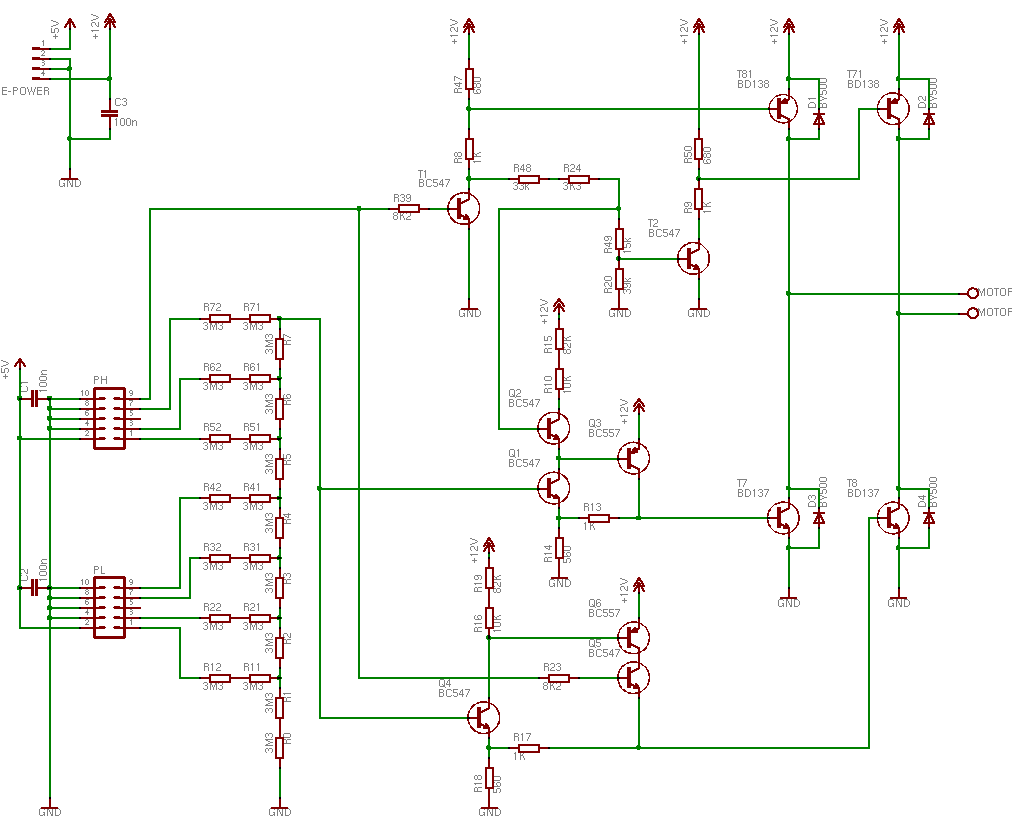
Moin Moin oder auch: buenos diapositivos :) Dem Umstand, dass kein Kommentar kam, entnehme ich mal, dass der letzte Schaltplan noch nicht der große Durchbruch war. Jetzt weiß ich nicht, ob Eure Erwartungen an mich zu hoch sind, oder ich mich besonders doof angestellt habe ... vielleicht habe ich ja doch noch nicht so viel verstanden, wie es vielleicht den Anschein hatte? Anyway! Hier ist ein neuer Versuch und ich würde mich sehr über Kommentare/Hinweise freuen. Gruß Santi
Hai Santi, durch Deine Transistorei blicke ich nicht mehr durch. Deshalb sage ich dazu auch nichts. Was mir so überhaupt nicht in den Kopf will: Warum soll der Motor denn unbedingt mit einer variablen Spannung gesteuert werden? Wenn's ein guter Motor ist, läuft der ab geschätzten 3V an, damit verschenkst Du schon mal "ein Viertel" Deines DA-Wandlers. Wenn der Motor dann dreht, hat er kein Drehmoment, d.h. die kleinste Last bringt ihn zum Stehen. Wenn es schon analog sein soll, warum steuerst Du den Motor nicht wenigstens mit einem variablen Strom an? Der Strom bringt das Drehmoment, da hättest Du auch bei ganz niedrigen Drehzahlen ein brauchbares Drehmoment. Und warum darf es keine PWM-Ansteuerung sein? Gruß, Peter
hallo Die schaltung ist recht abenteuerlich,aber funktionstüchtig. Die Analogsteuerung sollte überdacht werden. Die R-kombination hat mind 6 Mohm Ri. die Tr Q1 und Q4 als emitterfolger 560 Ohm Ri bei 100 verstärkung ca 60 K-Ohm. Dürfte nicht richtig fuktionieren, oder sind es keine 3,3 M-Ohm -R MfG
Angehängte Dateien:
-

DC-Driver.png
12 KB
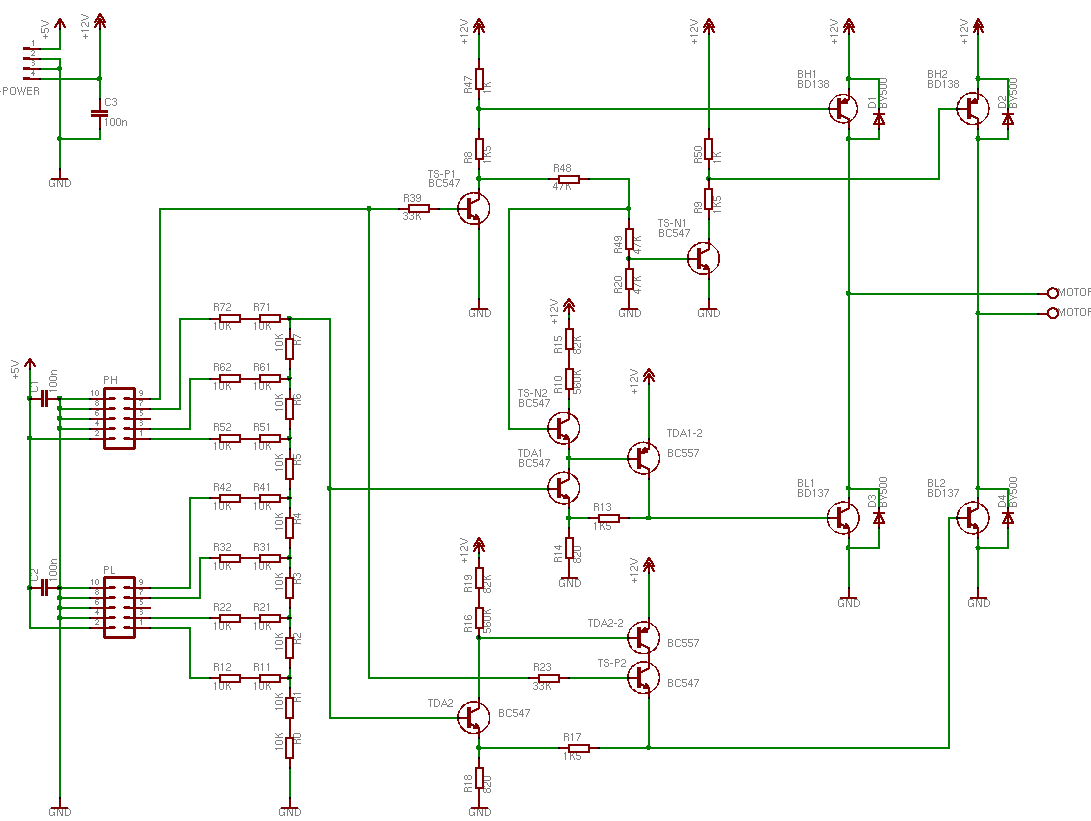
Hallo zusammen, > durch Deine Transistorei blicke ich nicht mehr durch. Deshalb sage ich > dazu auch nichts. Das ist der Grund, warum dieser Thread etwas länger wird - ich möchte was lernen :) > Und warum darf es keine PWM-Ansteuerung sein? Nun - meiner Ansicht nach ist der Hardware-Entwurf einer PWM-Steuerung geradezu trivial. Ich hätte das "Problem" also in die Software verlagert. Zum jetzigen Zeitpunkt möchte ich mich noch nicht mit Programmierung, sondern mit dem Schaltungsentwurf beschäftigen. Mein Verständnis der analogen Zusammenhänge ist noch extrem rudimentär - und das möchte ich ändern :) > Was mir so überhaupt nicht in den Kopf will: Warum soll der Motor denn > unbedingt mit einer variablen Spannung gesteuert werden? Wenn's ein > guter Motor ist, läuft der ab geschätzten 3V an, damit verschenkst Du > schon mal "ein Viertel" Deines DA-Wandlers. Wenn der Motor dann dreht, > hat er kein Drehmoment, d.h. die kleinste Last bringt ihn zum Stehen. Vielleicht fehlt mir ja noch etwas Durchblick, aber meiner Ansicht nach wird sowohl die Spannung, alsauch der Strom gesteuert/verstärkt - also sollte der Motor das bekommen, was er haben möchte. Wenn Du was zur Lichtung meines Nebels beitragen kannst, dann nur raus mit der Sprache :) > Die Analogsteuerung sollte überdacht werden. > > Die R-kombination hat mind 6 Mohm Ri. > die Tr Q1 und Q4 als emitterfolger 560 Ohm > Ri bei 100 verstärkung ca 60 K-Ohm. > > Dürfte nicht richtig fuktionieren, Habe die Schaltung (soweit mir möglich) nochmal durchgerechnet. Ich fand noch ein paar aussagekräftigere Datenblätter ... Das mit dem Nicht-Funktionieren ist mir nicht klar. Könntest Du mir das bitte etwas detaillierter erklären? Wovon hängt die Auslegung des R2R-Netzes ab? Nach meinem Verständnis ist der Strom, den TDA1/TDA2 brauchen irgendwo im Nanobereich - warum sind dann die 3 MegOhm falsch? Damit Ihr mal wieder meine Gedankengänge nachvollziehen könnt, bzw. meine Denkfehler sich leichter erkennen lassen, hier die Beschreibung, wie ich die Schaltung durchgerechnet habe: > Transistoren-Legende: --------------------- BH1: PNP-Transistor für oberen Brückenteil BH2: PNP-Transistor für oberen Brückenteil BL1: NPN-Transistor für unteren Brückenteil BL2: NPN-Transistor für unteren Brückenteil TS-P1: Schalt-Transistor für positiv Logik TS-N1: Schalt-Transistor für negativ Logik TS-P2: Schalt-Transistor für positiv Logik TS-N2: Schalt-Transistor für negativ Logik TDA1: Transistor DA-Wandlung TDA2: Transistor DA-Wandlung TDA1-2: Darlington-Transistor DA-Wandlung TDA2-2: Darlington-Transistor DA-Wandlung > Randbedingungen: ---------------- - Verbraucher hat 34 Ohm an 12 Volt. - Für Schalttransistoren wird h_FE halbiert, ansonsten wird h_FE(min) verwendet. - die BH*-Transistoren müssen den Verbraucherstrom liefern, also 12 V / 34 Ohm -> 350 mA > Schaltungsauslegung: -------------------- Der BD137/BD138 hat bei einem Kollektorstrom von 350 mA einen h_FE von 80. Somit werden die oberen Brückentransistoren mit 8,75 mA - die unteren mit 4,5 mA angesteuert. Der BC547 hat bei einem Kollektorstrom von 10mA einen h_FE von 130. In dem Bereich ist die h_FE-Kennlinie fast waagerecht, d.h. es wird in allen Fällen mit diesem h_FE gerechnet. Der BC557 hat bei einem Kollektorstrom von 5 mA einen h_FE von 450. Die beiden oberen Schalttransistoren TS-P1 und TS-N1 müssen unterschiedlich berechnet werden, weil einmal die Basis an 12V und das andere Mal an 5V hängt. TS-P1 muss einen Kollektorstrom von 8,75 mA durchlassen, was einem Basisstrom von 0,14 mA entspricht. Gegen die 5V vom DAC gerechnet ergibt sich rechnerisch ein Widerstand von 31K - verwendet wird 33K. TS-N1 muss auch einen Kollektorstrom von 8,75 mA bei einem Basisstrom von 0,14 mA durchlassen. Gegenüber 12V ergibt sich ein Vorwiderstand von 90K. Der Basisstrom der oberen Brückentransistoren fließt durch die beiden Schalttransistoren. Für den Basisstrom von 8,75 mA ergibt sich ein Vorwiderstand von 1,5K (R8 und R9). Um nicht bei 12V festgenagelt zu sein, erhalten die oberen Brückentransistoren noch einen Spannungsteiler zum Vorwiderstand im Verhältnis 2:3 Damit der Strom von BH1 nicht an TS-P1 vorbei fließt, wird der Spannungsteiler für TS-N1 sehr hochohmig ausgelegt. Die 90K werden in je 47K aufgeteilt. Zusätzlich wird noch ein 3. 47K Widerstand zugefügt, um den Spannungsteiler zu ermöglichen (Erklärung für 3 Widerstände folgt etwas später). > Bis hierher ist die obere Brücke fertig. Die unteren Brückentransistoren sollen den Motor passend zum DAC-Wert regeln. Um die 350mA zu liefern, benötigen sie einen Basisstrom von 4,5 mA. Das ist klein genug für die BC547/BC557. Zuerst werden die beiden Logik-Schalttransistoren (TS-P2 und TS-N2) gedanklich aus der Schaltung entfernt. Überig bleiben 2 komplementäre Darlington-Stufen. Eine für die Spannungsverstärkung (TDA1/2 und TDA1-2/TDA2-2) und die andere für die Stromverstärkung (TDA1-2/TDA2-2 und BL1/BL2). Bei den netten Indern fand ich den Hinweis, dass der Strom durch den Steuerwiderstand mindestens 10mal kleiner sein soll, als der Strom durch den Darlington-Transistor. Folgt zuerst die Berechnung von R17 bzw. R13: Darlington-Transistor ist der BL1/BL2, welcher einen Basisstrom von 4,5 mA benötigt. R13/R17 = 0,65 / (0,1 * 4,5 mA) = 1,5K Nun kann der Vorwiderstand von TDA1-2 bzw. von TDA2-2 berechnet werden: Dieser ist auch wieder ein Darlington-Steuer-Widerstand und soll somit auch weniger als 1/10 des Basisstroms von TDA2-2 durchlassen (zur Erinnerung: TDA2-2 hat einen h_FE von 450). R16 + R19 (R10 + R15) = 0,65 / (0,1 * 4,5mA / 450) = 650K Deshalb 2 Widerstände mit 560K + 82K. Bleibt noch den Spannungsteiler auszurechnen. Die Spannungsverstärkung wird bestimmt durch die Widerstände R17/R18, bzw. R13/R14. Spannungsverstärkungsfaktor = R17 + R18 / R18 Der Faktor ist 12V / 5V ~ 2,5 R17 wurde bereits berechnet, also kann R18 durch raten/probieren leicht rausgefunden werden. Ich kam auf 820 Ohm. Fehlt noch die Möglichkeit der Umschaltung der unteren Verstärker. TS-N2 ließ sich rel. einfach integrieren - es muss lediglich dafür gesorgt werden, dass U_BE von TS-N2 größer als U_BE von TDA1 ist. Deshalb wurde vorhin der Vorwiderstand von TS-N1 in 2 Widerstände aufgeteilt. TDA2 läßt sich nicht in gleicher Weise schalten, da hier nur die 5 Volt vom DAC zur Verfügung stehen. Deshalb wird der Schalter von TDA2 unter den Stromlieferanten gesetzt. Selbst wenn TDA2 leitet kommt kein Strom zu BL2 wenn TS-P2 sperrt. Jetzt ist auch die untere Brücke ausgelegt, fehlt nur noch das R2R-Netz. Die Ströme von TDA1/TDA2 dürften irgendwo im Nanobereich liegen, sodass die Auslegung des R2R-Netzes von anderen Kriterien abhängt. Gruß Santi P.S. Bin für jeden Hinweis dankbar
Bitte melde dich an um einen Beitrag zu schreiben. Anmeldung ist kostenlos und dauert nur eine Minute.
Bestehender Account
Schon ein Account bei Google/GoogleMail? Keine Anmeldung erforderlich!
Mit Google-Account einloggen
Mit Google-Account einloggen
Noch kein Account? Hier anmelden.