Kann mir jemand erklären wie die Sobel Maske zustande kommt und wieso eine Faltung mit dem Filterkern: -1 0 1 -2 0 2 -1 0 1 einer Ableitung der Grauwerte entspricht? Finde dazu leider keine mathematische Erklärung und in meinem Skript steht dazu nur: diskret: Ableitung -> Differenz :-) Den Prof. kann ich leider nicht fragen, da ich mit dem Studium fertig bin. Vielleicht hat jemand von euch ne Erklärung dafür. Ich verstehe wie man den Filter anwendet, mir fehlt lediglich der Grundgedanke dahinter. Woher kommt diese Maske ?
Das Ganze läuft eigentlich unter numerisch Differentieren. Was bedeutet Differenzieren? Der Anstieg in jedem Punkt. Betrachte mal nur eine Pixelzeile. (kann man recht einfach in Exel mal durchspielen) Der einfachste Weg den Anstieg zwischen 2 Punkten zu bestimmen ist doch die Subtraktion der Amplituden... Für dich heißt das: Dein aktuelles Pixel soll dem Anstieg der benachbarten Pixel entsprechen. Also Wert vom Nachfolger minus Wert vom Vorgänger. Somit hast du die 1.Zeile deiner Faltungsmatrix. [-1 0 1] Nun hat dein Pixel aber noch weiter Umgebungspixel, da wird dies dann einfach auf die anderen ausgeweitet. Ich hoffe der Denkanstoß hilft dir weiter, das war ja jetzt der Sobel-Operator für X-Richtung. Für Y-Richtung wird dieser einfach um 90° gedreht. Gruß Alexander
Bum Bum Kurt schrieb: > Kann mir jemand erklären wie die Sobel Maske zustande kommt > > -1 0 1 > -2 0 2 > -1 0 1 Durch Kombination (lineare Faltung) der Operatoren
Vielleicht habe ich auch irgendwo Spalten vertauscht, ist auch schon lange her die Vorlesung ;-) Anmerkung: Kann es sein, dass hier der \newline Befehl aus LaTeX nicht funktioniert?
Alexander Liebhold schrieb: > Das Ganze läuft eigentlich unter numerisch Differentieren. Was bedeutet > Differenzieren? Der Anstieg in jedem Punkt. > > Betrachte mal nur eine Pixelzeile. (kann man recht einfach in Exel mal > durchspielen) Der einfachste Weg den Anstieg zwischen 2 Punkten zu > bestimmen ist doch die Subtraktion der Amplituden... > > Für dich heißt das: Dein aktuelles Pixel soll dem Anstieg der > benachbarten Pixel entsprechen. Also Wert vom Nachfolger minus Wert vom > Vorgänger. Somit hast du die 1.Zeile deiner Faltungsmatrix. [-1 0 1] > > Nun hat dein Pixel aber noch weiter Umgebungspixel, da wird dies dann > einfach auf die anderen ausgeweitet. Das ist mir auch klar, ich dachte nur das da ein tieferer mathematische Sinn dahintersteckt :) Aber der Denkanstoß hat geholfen somit ist mir auch alles klar. Warum man da groß mit Faltung rummacht ist allerdings übertrieben :-) Ich könnte so denken wie lippi und bastel mir dann aufgrund dessen den Filterkern. Vielen Dank an euch Beide !!!! Habs verstanden ;)
Bum Bum Kurt schrieb: > Warum man da groß mit Faltung rummacht ist allerdings > übertrieben :-) Im Grunde genommen ist doch die Signalverarbeitung nichts anderes als eine einzige große Faltungsorgie ;-)
Alexander Liebhold schrieb: > Das Ganze läuft eigentlich unter numerisch Differentieren. Was > bedeutet > Differenzieren? Der Anstieg in jedem Punkt. > > Betrachte mal nur eine Pixelzeile. (kann man recht einfach in Exel mal > durchspielen) Der einfachste Weg den Anstieg zwischen 2 Punkten zu > bestimmen ist doch die Subtraktion der Amplituden... > > Für dich heißt das: Dein aktuelles Pixel soll dem Anstieg der > benachbarten Pixel entsprechen. Also Wert vom Nachfolger minus Wert vom > Vorgänger. Somit hast du die 1.Zeile deiner Faltungsmatrix. [-1 0 1] Überragende Antwort! Danke Alexander, genau das hat mir gefehlt. Warum steht das nirgends in nem Buch, Skript oder sonst wo? Optimal, so einfach kanns sein :)
Moin Moin, ich weiß, dass das hier zu spät ist, aber für Leute die ebenfalls auf der Suche nach einer Erklärung sind, gibt es eine aktuelle (2014) von Herrn Sobel selbst: http://www.researchgate.net/publication/239398674_An_Isotropic_3_3_Image_Gradient_Operator Er versucht den Gradienten einer 3x3 Pixelgruppe zu bestimmen. Ein Gradient is ja ein Vektor, hat also eine Amplitude und eine Richtung. Er bildet hierzu Differenzen zwischen den gegenüberliegenden Pixelpaaren, so dass am Ende eine horizontale, eine vertikale und 2 diagonale Differenzen entstehen. Diese werden jeweils durch ihre Distanz geteilt (man erhält jetzt sozusagen eine Steigung) und mit ihrem Einheitsvektor multipliziert. Nach einer weiteren Vektoraddition der entstehenden Vektoren ist der Gradient berechnet. Er zeigt in dem Papier auch, wie diese Vektoraddition in die zwei Sobel Operatoren (x und y) zerlegt werden kann. Die Sobel Operatoren bestehen nur aus den Koeffizienten der zu summierenden Pixeln. Die Koeffizienten sind die vorher berechneten (Differenz geteilt durch Distanz). Damit die Koeffizienten Ganzzahlig sind, multipliziert er diese noch mit dem Faktor 4. Das einzige was ich selbst noch nicht verstehe ist, warum er bei den Diagonalen Elementen durch 4 teilt, anstatt wie bei den orthognalen durch 2. Jedenfalls ist das der Grund, warum am Ende in den Operatoren auch -2 und +2 vorkommen.
Bitte entschuldigt den Doppelpost. folgende Rechnung könnte den Faktor 4 erklären: Die vertikale und horizontale Pixeldifferenz ist gleich 2. Deswegen teilt Sobel durch 2. Bei diagonalen Pixelpaaren ist die Distanz aber 1 / (2 * sqrt(2)). Wenn man nun zusätzlich noch die diagonale Differenz auf die beiden orthogonalen Axen aufteilt bzw. projiziert, so kommt als Rechnung 1 / (2 * sqrt(2)) * cos pi/4 = 1 / 4 heraus. Wobei cos mit sin ausgetauscht werden kann, ist also für x und y Richtung gleich, da die Diagonale ja im 45 Grad Winkel steht. Dies ist zwar nur eine Vermutung, passt aber anscheinend perfekt.
Bum Bum Kurt schrieb: > -1 0 1 > -2 0 2 > -1 0 1 Diese Matrix unterstützt aber doch nur die Ableitung in X, oder? Muss man da nicht noch die um 90 Grad gedrehte Matrix berechnen?
Markus W. schrieb: > Bum Bum Kurt schrieb: >> -1 0 1 >> -2 0 2 >> -1 0 1 > > Diese Matrix unterstützt aber doch nur die Ableitung in X, oder? > > Muss man da nicht noch die um 90 Grad gedrehte Matrix berechnen? Und? Einmal transponieren bitte. Für diagonale Kanten musst du eigentlich auch noch 'ne Variante haben. Bzw. kommt es natürlich wie immer auf die Anwendung an - in den meisten Fällen wird man mit 'nem Laplace oder Canny besser fahren bei der Kantendetektion. Siehe auch: Beitrag "Approximation der partiellen Ableitung bei Pixeln"
Weil der Thread gerade wiederbelebt wurde Vincent schrieb: > folgende Rechnung könnte den Faktor 4 erklären: Man kann ganz direkt zu den Distanzen kommen, wenn man nur eine passende Metrik nimmt. Er schreibt, er operiert auf einem > Cartesian Grid. Grid, also Raster, ist hier der Punkt. Wenn er dabei eine Manhattan-Metrik genommen hat, dann kommt er direkt auf die verwendeten Distanzen, da in der Manhattan-Metrik die Distanz zwischen zwei Punkten die Summe der Beträge der einzelnen Komponenten ist (was du über dein Projizieren erreicht hast). Beispielsweise ist die Distanz der Punkte (1,2) und (3,4) in der Manhattan-Metrik: |1 - 3| + |2 - 4| = 2 + 2 = 4 Aber, er selbst schreibt auch > Notice that the square root fortuituously drops out of the formula. Das klingt eher so, als ob er auf anderem Weg zu seinem Ergebnis gekommen ist, oder erst spät in dem nicht gezeigten Teil seiner Rechnung implizit oder explizit die Manhattan-Metrik verwendet hat.
Angehängte Dateien:
-

Sobelfilter-1D-2D-js.jpg
35 KB

Falk S. schrieb: > Und? Einmal transponieren bitte. Für diagonale Kanten musst du > eigentlich auch noch 'ne Variante haben. Eigentlich sollten sich die Ergebnisse der orthogonalen Betrachtung doch komplex ergänzen? Habe das mal für einen 5x5 durchgeführt. Sieht eigentlich gut aus. Ich verwende den allerdings auch mit eingebautem Fenster.
Angehängte Dateien:
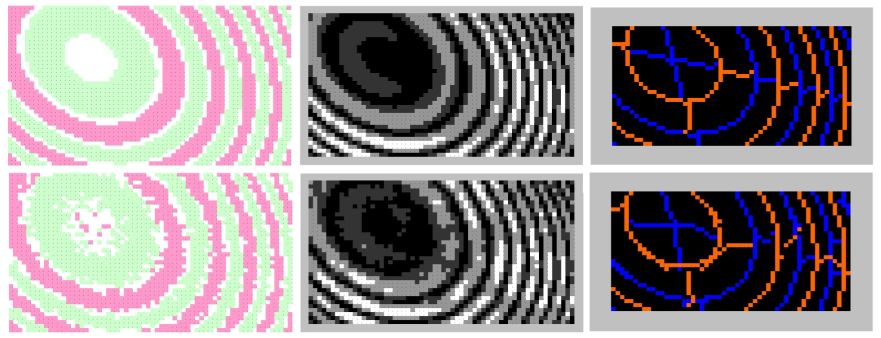
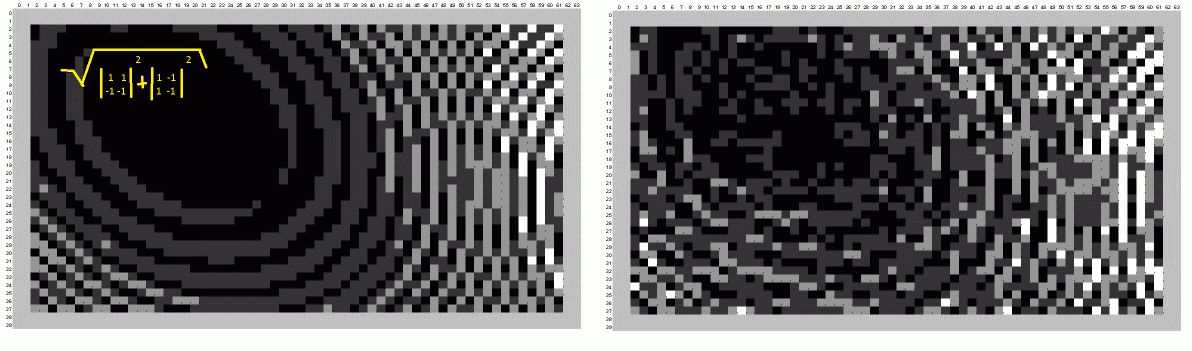
Das Problem mit Sobel und seinen Freunden ist aber immer, dass man eine mitunter ein Vorbearbeitung des Bildes benötigt und zudem das Ergebnis noch interpretieren muss, wenn man Objekte suchen will und dafür die relevanten Punkte ermitteln möchte. Ich verwende da schon lange einen differenzial geometrischen Filter, der auf Gradientenbetrachtung basiert. Der liefert dann entweder die positiven oder negativen Wendepunkte oder alternativ die Maxima. Das Ergebnis sind nicht Punkte sondern echte Linien mit Breiten von überwiegend nur einem Pixel. Das Verfahren ist ziemlich resistent gegenüber Rauschen und ungleichmäßig beleuchteten Bildern und geht on the fly in einem einzigen Frame. Diese Werte kann man direkt in eine Rechenpipeline stopfen, die den Kreismittelpunkt finden kann, bzw. die Linie fittet. Im Bild oben sind die quer laufenden Gradienten in derselben Farbe dargestellt, wie die längs laufenden. Das muss man nicht so machen, sondern kann die partiell auswerten, wenn man das für das Problem braucht.
Jürgen S. schrieb: > Falk S. schrieb: >> Und? Einmal transponieren bitte. Für diagonale Kanten musst du >> eigentlich auch noch 'ne Variante haben. > Eigentlich sollten sich die Ergebnisse der orthogonalen Betrachtung doch > komplex ergänzen? Hmm, da wär ich mir beim Sobel nicht so sicher, dass beide Faltungsmasken spektral die gleiche Darstellung liefern... die Frequenzen horizontaler Kanten und die der vertikaler Kanten sind eben im Allgemeinen nicht die gleichen. Sobel macht halt nur 'ne Ableitung nach x bzw. nach y. Überführt man die Sobel-X und Sobel-Y-Varianten von folgendem Beispiel, behaupte ich einfach mal (ohne das jetzt durch 'ne FFT gejagt zu haben), dass da spektral was anderes dabei rumkommt: http://opencv-python-tutroals.readthedocs.org/en/latest/py_tutorials/py_imgproc/py_gradients/py_gradients.html
Bei Original Sobel sicher nicht, ja - aber man könnte ja weiter denken: Ein neutraler Filter mit x,y (1,1, ... -1, -1) und komplexer Berechnung wird ausreichend lange Kanten vektoriell in beide Richtungen gleichmässig abbilden. Ist halt nur sehr rauschempfindlich.
Angehängte Dateien:
-

2D-2x-ortho-Filter.gif
62 KB
{kind=link}
Habe es nochmal ausprobiert: Das Problem ist, dass man mit den Pixeln nur dann einen echten 2D-Gradienten abbilden kann, wenn man eben eine 3x3 Matrix um einen Mittelpunkt bildet. Diese Matrix ist von der vektoriellen Länge aber schon zu gross, um kleine Radien sauber zu erfassen. Das geht nur mit einem Vektor der Länge 1 korrekt, also der Differenz von Punkt zu Punkt. Die ist aber extrem rauschempfindlich und praktisch nicht auszuwerten. Ein Kompromiss zeigt die Grafik oben: Ein 2x2 Filter mit verrutschten Mittelpunkten, also einem Vektrokreuz in den Zwischenräumen von Punkten. Das resultierende Bild ist um einen halben Pixel versetzt, was bei der Analyse zu beachten wäre. Auch das ist noch ziemlich rauschempfindlich, kann aber die Kurzen homogen und kontinuierlich abbilden. Problem aber auch hier: Die Steilheit der Kante fließt in den Endwert ein, was man nicht unbedingt möchte.
:
Bearbeitet durch User
@Juergen: thx für das Beispiel, jetzt wird mir so langsam klar, was Du zu tun versuchst: was Du beschreibst geht in Richtung Roberts-Cross Kantendetektor. Das ist halt der miese Trade-Off: nimmt man 'nen rauschunempfindlichen Kantendetektor hat der halt die Entrauschung eingebaut und ist teurer. Die günstigen Detektoren gehen halt dann nur bei optimalen Bedingungen für den Sensor und gutem SNR. Ich nehme an, Du versuchst, um die Anzahl notwendiger Operationen für eine zweidimensionale Kantendetektion zu minimieren. Hast du die Möglichkeit solche Faltungen per DSP-Befehlssatzerweiterungen zu crunchen (falls die nicht für noch teurere Operationen gebraucht werden) - die sollte ja eigentlich bei so einer großen Anzahl gleichförmiger Daten mit Multiply/Accumulate eigentlich ganz gut was bringen.
Falk S. schrieb: > solche Faltungen per DSP-Befehlssatzerweiterungen zu crunchen Was meinst Du mit Befehlssatzerweiterung?
Jürgen S. schrieb: > Was meinst Du mit Befehlssatzerweiterung? Na ja, auf älteren ARMs z.B. die DSP-Intrinsics, bei Cortexen könnte auch NEON interessant sein. Siehe auch, Seiten 259ff: https://books.google.de/books?id=vdk4ZGRqMskC&lpg=PP1&dq=sloss%20arm%20system%20developers%20guide&hl=de&pg=PA273#v=onepage&q=sloss%20arm%20system%20developers%20guide&f=false Edit: für 'ne FPGA-Implementierung entfiele diese Option - höchstens bei 'nem Zynq.
:
Bearbeitet durch User
Jürgen S. schrieb: > Ach so, SW-Gedöhns. Sowas kommt mir nicht rein, ist FPGA :-) Sorry, bin zuviel auf ARM unterwegs ^^ Wenn's nur ein Binärbild wäre, könntest Du ja vielleicht die möglichen 3x3 Nachbarschaften als Eingabe für eine LUT nutzen, die den Wert des Mittelpunkts der Nachbarschaft zurückgibt. Liegt halt das Dilemma dann in der Binarisierung. Aber mehr fällt mir da jetzt auch nicht mehr ein. :(
Wie ich sowas mache, weiß ich schon :D je nach Anwendung wird mehr oder weniger breit gefiltert. In einem Fall 13x13 Subpixel. Da kann man dann den Kanternerkenner mit einbauen oder hinten dran hängen.
Bitte melde dich an um einen Beitrag zu schreiben. Anmeldung ist kostenlos und dauert nur eine Minute.
Bestehender Account
Schon ein Account bei Google/GoogleMail? Keine Anmeldung erforderlich!
Mit Google-Account einloggen
Mit Google-Account einloggen
Noch kein Account? Hier anmelden.