



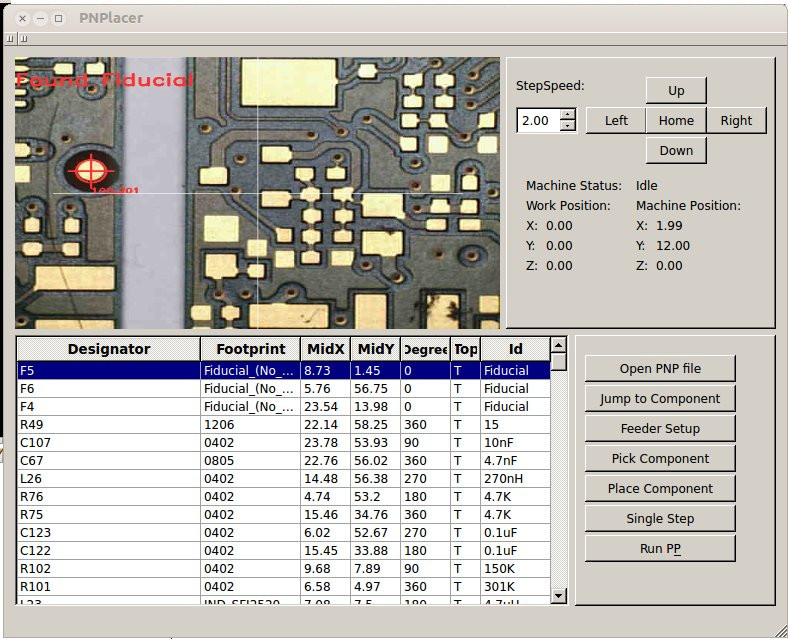
Hallo, ich bin ein ziemlicher Anfänger mit Stepper Motoren. Hat jemand eine Ahnung woran das liegen kann das der Stepper Motor hin und wieder so eine Ungenauigkeit hat und ob man das ohne zusätzlichen Encoder und Visual Erkennung so hinbekommen kann das es ordentlich funktioniert? 1. Ausgangspunkt 2. Ich fahre 2 Einheiten nach oben und es stimmt noch alles 3. Ich fahre auf den Ausgangspunkt zurück, hier stimmt auch noch alles 4. dann fahre ich 2 Einheiten nach unten und es stimmt schon nicht mehr 5. ich fahre zurück (alles relativ positioniert von der aktuellen Position) und die Position ist wieder falsch. 6. ich fahre wieder 2 Einheiten nach oben -- und siehe da die Position stimmt wieder 7. ich fahre 2 Einheiten zurück (zum 1. Ausgangspunkt) und es stimmt ebenfalls wieder. Nun kann ich das zwar mit Visual Erkennung kompensieren, aber sobald ich das mit der Vakuumnadel machen würde wird es etwas schwierig da der Kopf ja die Sicht blockiert. Alternativ habe ich mir schon einen Encoder bestellt, der wird aber wohl erst kommende Woche eintreffen. Ich hab einfach keine Lust mehr bei Prototypen die kleinen SMD Bauteile selber zu setzen. Ich will mir die Streifen auflegen und die Maschine dann bestücken lassen. Damit das schneller geht habe ich mir auch schon bessere Motoren gekauft (Servos, welche wohl auch erst kommende Woche eintreffen werden). Im Grunde kann ich soweit auch schon jedes Pad der Platine anfahren und Fiducials erkennen, aber beim 0402 Gurt hab ich nun Probleme.
Angehängte Dateien:
-

pnplacer01_origin.jpg
87 KB -

pnplacer02_1up.jpg
89 KB -

pnplacer03_1down.jpg
89 KB -

pnplacer04_1up.jpg
92 KB
Ach zur Ansteuerung verwende ich Arduino mit Grbl mit Nema17 Motoren. Um das in Zukunft besser hinzubekommen hab ich mir auch bereits die Bauteile für diesen Controller bestellt: http://vbesmens.de/en/pick-and-place/controller.html Aber das wird wohl noch ein paar Wochen andauern bis diese Dinge hier eintreffen, bis dahin arbeite ich halt noch mit den vorhandenen Dingen.
Schrittmotoren folgen den Schritten weil die Mechanik sie nicht überlastet. Ein Encoder ist unsinnig, man sollte dann die Mecchanik reparieren. Da deine Schritte wohl manuell ausgelöst werden, ist eine zu hohe Geschwindigkeit und Beschleunigung wohl ausgeschlossen. Da nichts über deine Mechanik bekannt ist, würde ich auf deine Mechanik tippen, Schlackereffekte, denn der Motor ist nach einem Zyklus wohl wieder dort wo er hingehört. Und du willst gar keine Genauigkeit kleiner als 1 Schritt, daher sind schrittmotorbedingte Positionierfehler bei Mikroschritten. nicht dein Problem.
Ok das macht Sinn, es ist ein Shapeoko2, ich hab damit ohnehin erst mal vor das Ganze zu lernen. Wie bekommt man diese "Schlackereffekte" am besten in den Griff? Ich könnte jetzt wohl bevor ich ein Bauteil anfahre den Kopf immer etwas weiter von oben anfahren damit der Kopf nur von einer Richtung kommt, als Workaround wäre das mal in Ordnung um weiter an der Software arbeiten zu können. Es hängt wohl vom Gurt und dem Zahnrad ab, welche eignen sich denn dafür um das Problem besser in den Griff zu bekommen?
Üblicherweise machen Schrittmotore einen Schritt, wenn man es ihnen sagt. ... aber bei Überlastung, zu hoher Geschwindigkeit zu viel Spiel im Lager und und und, können selbige verschütt gehen. Auch kann eine angepasste Stromversorgung nicht schaden. All diese (und mehr) Punkte sollten in Ordnung sein, dann gehen auch keine Schritte verloren. Nachträgliches messen ist Unsinn. In diesem Falle währen Analogmotore angesagt. Letztere haben meist ein größeres Leistungs/Volumen-Verhältnis und haben auch keine so großen Ansprüche an die Ansteuerung und so.
Martin schrieb: > Es hängt wohl vom Gurt und dem Zahnrad ab, welche eignen sich denn dafür > um das Problem besser in den Griff zu bekommen? Wie sieht es denn jetzt aus, welche Materialien werden verwendet? Bei den 3D-Druckern setzt sich GT2-Zahnriemen/-scheiben durch, das ist auch bei 16 Zähnen noch durchaus schlupffest, sofern die Spannung stimmt. Wie sieht denn auch die Umlenkung aus
https://dzevsq2emy08i.cloudfront.net/paperclip/technology_image_uploaded_images/24385/large/inventables_Shapeoko_v21106.jpg?1381512664 Dort stehen die Bauteile: http://www.shapeoko.com/wiki/index.php/Parts#X-_and_Y-Axes Ich habe die Gurte etwas fester gezogen habe das Problem aber noch immer (ich bilde mir ein es ist trotzdem etwas besser geworden. Es sei nocheinmal angemerkt das es ein 0402er SMD Gurt ist welchen ich versuche zu positionieren. Ich denke sofern ich diesen immer von unten Anfahre kann ich mit dem "jitter" leben und muss es halt in Software aufrechnen. Es scheint also tatsächlich kein verlorener Schritt zu sein.
Das sieht ganz so aus als ob du ein Umkehrspiel in deiner Mechanik hättest. Mögliche Abhilfen: - Zielposition immer aus einer Richtung anfahren - Umkehrspielkompensation in der Software - Mechanik spielfrei einstellen Mit freundlichen Grüßen Thorsten Ostermann
Die maximal mögliche "Intrittgeschwindigkeit" darf nicht überschritten werden da sonst der Stepper Schritte "verliert" und damit die Position nicht mehr stimmt. Abhilfe schafft hier eine "Rampe" in der Ansteuerung. Ich denke aber , dass jedes schlaue Programm das normalerweise von Hauese aus macht. Irren ist aber möglich... Zu schwach ausgelegt für seine Aufgabe wäre eine andere Ursache...
Schrittverluste dürften hier nicht das Problem sein, sonst würde er bei Schritt 7 nicht wieder genau am Ausgangspunkt ankommen. Mit freundlichen Grüßen Thorsten Ostermann
Jede halbwegs taugliche Software hat eine Umkehrspielkompensation (backlash compensation). Wenn keine starken mechanischen Kräfte auf die Achsen wirken, reicht das aus. Ansonsten: spielfreie Mechanik = teuer.
Ja, ich denke das sollte ich damit schon hinbekommen. backlash compensation das sind die Stichworte, bei PNP ist das ja nicht sonderlich aufwendig da ich ja nur X/Y abfahren muss und keine genauen Kreise oder Elipsen ziehen muss.
MaWin schrieb: > Schrittmotoren folgen den Schritten weil die Mechanik sie nicht > überlastet. Ein Encoder ist unsinnig, man sollte dann die Mecchanik > reparieren. > Was bitte ist an einem Closed loop unsinnig?
W. M. schrieb: > Was bitte ist an einem Closed loop unsinnig? Man kann dann einen billigeren kleineren kräftigeren (DC) Motor nehmen und nicht den teuren grossen schwachen Schrittmotor. Macht dir übrigens jeder (Tinten-)druckerhersteller vor.
W. M. schrieb: > Was bitte ist an einem Closed loop unsinnig? Das bei einer 'kraftfreien' Anwendung wie dieser bereits ein mechanisches Problem vorliegt, wenn Schrittverluste auftreten. Klar kann man das mit einem 'closed loop' System abfangen, aber das Problem zu beheben ist zielführender. Davon abgesehen dass ein Encoder basierter 'closed loop' nur garantiert ist das der Motor gedreht hat, nicht dass der Kopf da ist wo man ihn haben will. Closed loop macht eher Sinn wenn klar ist dass variable Kraefte auf den Kopf wirken, die auch mal groesser als die Motorkraft sein koennen.
Angehängte Dateien:
-

pnplacer1.jpg
160 KB
{kind=link}
Es klappt ja schon :-) Das Problem wurde schon vorher genannt, es sind keine Schrittverluste.
MaWin schrieb: > W. M. schrieb: >> Was bitte ist an einem Closed loop unsinnig? > > Man kann dann einen billigeren kleineren kräftigeren (DC) Motor nehmen > und nicht den teuren grossen schwachen Schrittmotor. > > Macht dir übrigens jeder (Tinten-)druckerhersteller vor. Dann schreib, dass es deiner Meinung nach unsinnig ist. Mich stoert dieses Absolutistische. Ausserdem kann es schon Sinn machen wenn man ein bestehendes System um Encoder erweitert. Kann durchaus preiswerter sein als das gesamte System zu ersetzen. @ Florian > Sinn wenn klar ist dass variable Kraefte auf den Kopf wirken, die auch > mal groesser als die Motorkraft sein koennen. Genau, und ein Encoder ist ws so ziemlich die billigste Messmethode um festzustellen wo das Problem auftritt und wie gross der Schleppfehler ist.
W. M. schrieb: > Dann schreib, dass es deiner Meinung nach unsinnig ist. Ich schreibe immer meine Meinung. > Mich stoert dieses Absolutistische. Heul doch.
MaWin schrieb: > W. M. schrieb: >> Dann schreib, dass es deiner Meinung nach unsinnig ist. > > Ich schreibe immer meine Meinung. > >> Mich stoert dieses Absolutistische. > > Heul doch. Reisegepaeck!
W. M. schrieb: > Dann schreib, dass es deiner Meinung nach unsinnig ist. Man könnte auch sagen, es ist technisch unsinnig, einen Steppermotor mit einem Encoder zu kombinieren. Ein richtig dimensioniertes Steppersystem braucht keinen Encoder und ein Encoder braucht keinen Steppermotor. Beides zusammen treibt nur die Kosten in die Höhe ohne einen technischen Vorteil zu bringen. Gruss Harald
Harald Wilhelms schrieb: > Man könnte auch sagen, es ist technisch unsinnig, einen Steppermotor > mit einem Encoder zu kombinieren. Ein richtig dimensioniertes > Steppersystem braucht keinen Encoder und ein Encoder braucht keinen > Steppermotor. Beides zusammen treibt nur die Kosten in die Höhe > ohne einen technischen Vorteil zu bringen. Auch wenn ich damit ein Anfänger bin widerspreche ich hier auf jeden Fall. Wenn ich mir die Pfuscher in der Wirtschaft so ansehe dann hat es durchaus einen Vorteil das Ganze mit einem Encoder zu überwachen. Beispiel? Die Fräse meines Platinenherstellers hat mir aufgrund eines Fehlers 600 Platinen zerschnitten. In einer perfekten Welt braucht man das wohl sicher nicht, aber was ist schon Perfekt, was passiert wenn etwas am Stepper defekt wird. Für ein Produktivsystem würde ich wenn ich Stepper verwenden würde, nur abgesicherte Stepper verwenden.
Bei Marlin anstelle con grbl kann man backslash einstellen. Teilweise hilft es auch 3mm hinter der Position zu fahren und dann das Bauteil anfahren.
Encoder beim steper ist durchaus sinnvoll. Gerade bei sich verändernden lasten, Reibung, verschleiss, ... Ob der nun auf der Achse hängt, oder elektronisch die Schritte erkennt, ist wurscht. Hochlaufkurven zu ermitteln ist nicht gerade spassig. Und dann noch bitte Bauteil und Fertigung schwankungen berücksichtigen, sowie Alterung der Lager, ... Und dann baut die machanik andere Lager ein, und die SW war wieder schuld das Schritte fehlen.
Bei stepper macht so was relativ wenig Sinn. Kommerzielle PNP haben teilweise so was weil der schritt.Motor mit schrittverlust betrieben wird, da dies 30% mehr speed bedeutet und trotzdem die Vorteile des schrittmotors im Vergleich zum Servo bestehen.
Hallo Harald, > Man könnte auch sagen, es ist technisch unsinnig, einen Steppermotor > mit einem Encoder zu kombinieren. Ein richtig dimensioniertes > Steppersystem braucht keinen Encoder und ein Encoder braucht keinen > Steppermotor. Beides zusammen treibt nur die Kosten in die Höhe > ohne einen technischen Vorteil zu bringen. Einspruch. Ein Encoder an einem Schrittmotor kann durchaus einen technischen Vorteil bringen. Aber nur dann, wenn man darauf eine echte Regelung aufbaut und nicht nur verlorene Schritte erkennt und nachführt. Dann kann man nämlich den Motorstrom dynamisch an die Last anpassen (höherer Wirkungsgrad) und bei feldorientierter Regelung im Feldschwäch-Betrieb sogar höhere Drehzahlen erreichen. Man muss neben den technischen Aspekten aber natürlich auch immer die kaufmänischen Aspekte berücksichtigen. Und da steht der Closed-loop Stepper schnell schlecht dar. Nicht alleine wegen der Kosten für den Encoder, sondern wegen des zusätzlichen Aufwandes für ein Gehäuse (in industriellen Anwendungen oft zwingend) und der störsicheren, geschirmten Verdrahtung mit robusten Steckverbindern. Wirklich sinnvoll ist das dann erst wieder, wenn man den Treiber direkt an den Motor packt. Dann kann man den optischen Encoder durch einen Encoder-IC auf Hallbasis ersetzen und spart sich die Verdrahtung. Auch aus EMV-Gesichtspunkten ist das positiv. Dafür braucht man dann aber eine Feldbus-Schnittstelle, was die Sache wieder teurer macht. Mit freundlichen Grüßen Thorsten Ostermann
Thorsten Ostermann schrieb: > Aber nur dann, wenn man darauf eine echte > Regelung aufbaut und nicht nur verlorene Schritte erkennt und nachführt. > Dann kann man nämlich den Motorstrom dynamisch an die Last anpassen > (höherer Wirkungsgrad) und bei feldorientierter Regelung im > Feldschwäch-Betrieb sogar höhere Drehzahlen erreichen. All das erlaubt ein Encoder, aber dazu braucht er keinen Schrittmotor. Ein 'normaler' Motor kann dann nämlich einen noch viel besseren Wirkungsgrad bringen und viel höhere Drehzahlen erreichen, und ist auch noch einfacher und billiger.
MaWin schrieb: > All das erlaubt ein Encoder, aber dazu braucht er keinen Schrittmotor. > Ein 'normaler' Motor kann dann nämlich einen noch viel besseren > Wirkungsgrad bringen und viel höhere Drehzahlen erreichen, und ist auch > noch einfacher und billiger. Kannst du mich aufklären wie du mit einem normalen Motor und einem Encoder eine genaue Position bzw. hohe Auflösung erreichen willst? Hast du eventuell einen Link wo man sich diesbezüglich weiter einlesen kann?
Ein Schrittmotor verliert sowieso keine Einzelschritte. Eine Hinweis auf die Ursache für die Positionierungsfehlern könnte die entsprechende Anzahl der Schritte sein.
Hallo MaWin, > Thorsten Ostermann schrieb: >> Aber nur dann, wenn man darauf eine echte >> Regelung aufbaut und nicht nur verlorene Schritte erkennt und nachführt. >> Dann kann man nämlich den Motorstrom dynamisch an die Last anpassen >> (höherer Wirkungsgrad) und bei feldorientierter Regelung im >> Feldschwäch-Betrieb sogar höhere Drehzahlen erreichen. > > All das erlaubt ein Encoder, aber dazu braucht er keinen Schrittmotor. > Ein 'normaler' Motor kann dann nämlich einen noch viel besseren > Wirkungsgrad bringen und viel höhere Drehzahlen erreichen, und ist auch > noch einfacher und billiger. Du diskutierst schon wieder am Thema vorbei. Ohne Feedback keine Regelung, das steht außer Frage. Das heißt aber nicht, dass ein Encoder am Schrittmotor pauschal unsinnig ist. Und welcher Motor für eine Anwendung optimal bzw. "billig" ist, hängt vom konkreten Einzelfall ab. Es ist keinesfalls so, dass "normale" Motoren immer billig sind und Schrittmotoren teuer. Ganz im Gegenteil, gerade weil Schrittmotoren so billig sind und bei niedrigen Drehzahlen auch ohne Getriebe ein hohes Drehmoment liefern, werden sie so gerne eingesetzt. Mit freundlichen Grüßen Thorsten Ostermann
Thorsten Ostermann schrieb: > Das heißt aber nicht, dass ein Encoder > am Schrittmotor pauschal unsinnig ist. Doch. Wenn man einen Encoder hat, braucht man keinen Schrittmotor mehr. Das ist meine Meinung und die Industrie macht das, ob bei Druckern oder Servoantrieben, genau so. Daß ein Anbieter von Schrittmotorsteuerungen das anders sieht, ist wohl marketingbegründet.
was ist das eigentlich für ein Programm? Pnplacer ? irgendwie spukt google dazu wenig sinvolles aus
MaWin schrieb: > Ein 'normaler' Motor kann dann nämlich einen noch viel > besseren Wirkungsgrad bringen und viel höhere Drehzahlen > erreichen, und ist auch noch einfacher und billiger. Und er hat selbstverständlich auch ein Haltemoment, nicht wahr?
Sven schrieb: > was ist das eigentlich für ein Programm? Pnplacer ? irgendwie > spukt > google dazu wenig sinvolles aus Es ist nur ein Tool das ich mir zum Ansteuern von dem Ganzen geschrieben habe.
Possetitjel schrieb: > Und er hat selbstverständlich auch ein Haltemoment, nicht wahr? In einer closed loop selbstverständlich.
MaWin schrieb: > Possetitjel schrieb: >> Und er hat selbstverständlich auch ein Haltemoment, nicht wahr? > > In einer closed loop selbstverständlich. Nö. Ein normaler Kollektormotor hat nie ein Haltemoment, egal, ob open oder closed loop. Der Motor bleibt, wie er ist. Das Problem liegt darin, dass Du hartnäckig nicht Willens oder in der Lage bist, zwischen dem Motor , also dem eletrisch-mechanischen Wandler, und dem Antriebssystem zu unterscheiden. Ein "bürstenloser Gleichstrommotor" ist einfach Schwachsinn. Ein BLDC ist ein elektronisch kommutierter Synchronmotor, nichts anderes. Warum ist noch niemand auf die Idee gekommen, einen "drehstromlosen Drehstrommotor" zu vermarkten? Dass es sich um eine simple Kombination aus DSAM und Umrichter handelt, muss man ja nicht verraten...
Possetitjel schrieb: > Ein "bürstenloser Gleichstrommotor" ist einfach Schwachsinn. Nun gut, damit hältst du den Rest der Welt der das Ding als BLDC beziechnet für schwachsinnig und nur dich für den der die Weisheit mit Löffeln gefressen hat. Wenn du dich da mal nciht irrst...
MaWin schrieb: > Possetitjel schrieb: >> Ein "bürstenloser Gleichstrommotor" ist einfach Schwachsinn. > > Nun gut, damit hältst du den Rest der Welt der das Ding als BLDC > beziechnet für schwachsinnig Keineswegs. Ich halte die Bezeichnung für schwachsinnig - nicht die Leute, die diese Bezeichung mangels besseren Wissens benutzen. Die sind i.d.R. nur gedankenlos. Viele wissen möglicherweise einfach nicht, dass das Prinzip permanenterregten Synchronmotoren ein halbes Jahrhundert alt ist (oder gar noch älter...) Mein Beitrag enthielt übrigens noch andere Kritikpunkte, zu denen Du bezeichnenderweise nichts gesagt hast.
Possetitjel schrieb: > zu denen Du bezeichnenderweise nichts gesagt hast. Weil sie genau so hanebüchen sind. Ein Permanentmagnet-Gleichstrommotor und ein bürstenloser Gleichstrommmotor unterscheidet sich durch genau ein Detail: Bei ersterem ist der Kommutator mechanisch, bei zweiterem elektronisch, also lediglich die modernere Variante von genau derselben Funktion. Warum der eine dann NICHT Gleichstrommotor heissen soll (aber ein Permanentmagnet-Gleichstrommotor natürlich niemals Drehstrommotor heissen darf) erschliesst sich nur Leuten, die so krank sind wie du. Ein Servomotor ist definiert als Motor (Aktor) mit Encoder (Sensor) http://de.wikipedia.org/wiki/Servomotor und wird immer in einem geschlossenen Regelkreis betrieben, hat also auch ein Haltemoment. Du bist einfach mächtig auf dem Holzweg.
Possetitjel schrieb: >dass das Prinzip permanenterregten Synchronmotoren ein halbes Jahrhundert >alt ist Das mag ja so sein aber, Ein BLDC ist KEIN Synchronmotor. Offenbar haben das alle hier begriffen, nur Du nicht. Es soll ja Leute geben die versuchen einen BLDC wie einen Synconmotor anzusteuern, die merken dann schnell das es so nicht geht. Es sei denn man verwechselt 'Motor dreht sich irgendwie' und 'Motor läuft ordentlich'.
:
Bearbeitet durch User
Thorsten Ostermann schrieb: > Hallo Harald, > >> Man könnte auch sagen, es ist technisch unsinnig, einen Steppermotor > Einspruch. Ein Encoder an einem Schrittmotor kann durchaus einen > technischen Vorteil bringen. Gut, ich lasse mich da gern vom Fachmann belehren. Beruflich habe ich mich hauptsächlich mit Positionierungen im Mikro- und Nanometerbereich beschäftigt, wo Schrittmotoren m.E. nur wenig sinnvoll sind. Dort wird typisch immer mit irgend- welchen Wegaufnehmern mit unterschiedlichen Aufbau gearbeitet. Gruss Harald
Hallo Steffen, > Das mag ja so sein aber, Ein BLDC ist KEIN Synchronmotor. Offenbar haben > das alle hier begriffen, nur Du nicht. Das sehe ich anders. Natürlich ist ein BLDC ein Synchonmotor, nämlich ein permanent erregter Synchronmotor. Andersherum ist aber nicht jeder Synchronmotor ein BLDC, weil es neben permanenterregten Maschinen auch fremderregte Versionen gibt. In der Praxis wird meistens (aber eben nicht immer) mit BLDC ein Motor bezeichnet der mit Kleinspannung betrieben wird (bis 50V), wärend Synchronmotor bzw. EC-Servo die Antriebe genannt werden, die mit Zwischenkreisspannugen von 200V und mehr betrieben werden. Wenn du anderer Meinung bist, kannst du uns ja gerne mal erklären, wo du den entscheidenen technischen Unterschied am Motor siehst. Aber eben nicht am Geber oder am Regler... Mit freundlichen Grüßen Thorsten Ostermann
Harald Wilhelms schrieb: > Gut, ich lasse mich da gern vom Fachmann belehren. Beruflich > habe ich mich hauptsächlich mit Positionierungen im Mikro- > und Nanometerbereich beschäftigt, wo Schrittmotoren m.E. > nur wenig sinnvoll sind. Das heißt also: Schrittmotor macht generell keine Schrittverlust? Und wenn doch, wie soll erfasst werden?
Tany schrieb: > Das heißt also: Schrittmotor macht generell keine Schrittverlust? Und > wenn doch, wie soll erfasst werden? So wie es für mich aussieht, zusammengefasst ein Schrittmotor soll im Grunde einfach nur so dimensioniert werden das er keinen Schrittverlust hat. Was ich mich frage ist wie vertrauenswürdig ist das in der Praxis? Läuft das wirklich so ab das es nie zu Schrittverlusten kommt sofern man das System einmal "passend" auslegt?
Martin schrieb: > So wie es für mich aussieht, zusammengefasst ein Schrittmotor soll im > Grunde einfach nur so dimensioniert werden das er keinen Schrittverlust > hat. So is es. Bei Werkzeugsmaschine mit großer Last könnte es aber schwierig werden.
Martin schrieb: > So wie es für mich aussieht, zusammengefasst ein Schrittmotor soll im > Grunde einfach nur so dimensioniert werden das er keinen Schrittverlust > hat. > Was ich mich frage ist wie vertrauenswürdig ist das in der Praxis? Läuft > das wirklich so ab das es nie zu Schrittverlusten kommt sofern man das > System einmal "passend" auslegt? In der Praxis ist das sehr vertrauenswürdig - wie Millionen von Auto-Tachos, Diskettenlaufwerken, klein-CNC-Fräsen, Handling-Systeme u.Ä. beweisen. Das heißt aber nicht, daß es nie zu Schrittverlusten kommt. Es ist durchaus bei kleinen Systemen nicht unnormal, Schrittverluste als erlaubten Betriebszustand zu nutzen - z.B. eine Nadel/einen Schlitten/sonstwas erst einmal gegen einen Anschlag zu fahren, um die Null-Position zu finden, ohne dafür einen Sensor zu brauchen. Oder Schrittverlust als Überlastsicherung: Bevor sich das gesamte Gestell wegen eines Programmierfehlers verzieht, dreht besser der Schrittmotor durch.
Walter Tarpan schrieb: > Es ist > durchaus bei kleinen Systemen nicht unnormal, Schrittverluste als > erlaubten Betriebszustand zu nutzen - z.B. eine Nadel > erst einmal gegen einen Anschlag zu fahren, um die > Null-Position zu finden, Ja, das klappt sogar im Nano-Newtonbereich. Man darf nur nicht zu schnell fahren. BTDT. :-)
Noch mal.Schritt verluste kann man über einen Sensor auf der Achse erkennen. Es geht aber auch elektrisch. Gute Schrittmotor Treiber können so was.
MaWin schrieb: > Ein Permanentmagnet-Gleichstrommotor > und ein bürstenloser Gleichstrommmotor > unterscheidet sich durch genau ein Detail: > Bei ersterem ist der Kommutator mechanisch, > bei zweiterem elektronisch, also lediglich die > modernere Variante von genau derselben Funktion. Richtig. > Warum der eine dann NICHT Gleichstrommotor heissen soll > (aber ein Permanentmagnet-Gleichstrommotor natürlich niemals > Drehstrommotor heissen darf) Das ist ganz einfach. Im deutschen Sprachraum unterscheidet man klassisch zwischen "ruhenden elektrischen Maschinen" (Trafos) und "rotierenden elektrischen Maschinen" (Motoren/Generatoren). Der Kommutator einer Gleichstrommaschine ist baulich untrennbar mit dieser vereint und rotiert mit dieser. Es ist daher logisch und klassisch üblich, diesen zur rotierenden Maschine zu zählen. Auch in der anderen Richtung ist Deine Argumentation falsch. Ein Permanentmagnet-Gleichstrommotor mit Kommutator (also eine Innen- polmaschine) ist tatsächlich kein Drehstrommotor - schlicht und ergreifend deshalb, weil kein Drehfeld existiert. > erschliesst sich nur Leuten, die so krank sind wie du. Nun ja... Krankheit liegt im Auge des Betrachters. Dich zeichnet - wie üblich - eine höfliche und streng sachorientierte Diskussionsführung aus. Respekt... > Ein Servomotor ist definiert als Motor (Aktor) mit Encoder > (Sensor) http://de.wikipedia.org/wiki/Servomotor > und wird immer in einem geschlossenen Regelkreis betrieben, Ein Servomotor ist ein Motor, der zum Einsatz in geschlossener Regelschleife vorgesehen ist, mehr nicht. > hat also auch ein Haltemoment. Du bekommst es nicht auf die Reihe. Der Servo- MOTOR , also die rotierende elektrische Maschine, hat nach wie vor KEIN Haltemoment. Woher auch? Der Servo- ANTRIEB , also die gesamte Regelschleife, HAT ein Haltemoment. Ist das so schwer?
Steffen Warzecha schrieb: > Possetitjel schrieb: >> dass das Prinzip permanenterregten Synchronmotoren ein >> halbes Jahrhundert alt ist > > Das mag ja so sein aber, Ein BLDC ist KEIN Synchronmotor. Ich schließe mich Thorsten O. an: Bitte zeige mir den konstruktiven Unterschied AM MOTOR , d.h. an der rotierenden elektrischen Maschine. Wenn ein elektronisch kommutierter Synchronmotor ein BLDC ist, dann ist auch ein Drehstrom-Asynchronmotor mit angeflanschtem Umrichter ein BLDC.
Possetitjel schrieb: > Das ist ganz einfach... ...falsch. > Dich zeichnet - wie üblich - eine höfliche und streng > sachorientierte Diskussionsführung aus. Respekt... Soll ich dich überzeugen ? Muss ich nicht, und du willst auch nicht lernen, warum Millionen anderen Leute den einen BLDC und den anderen Drehstrommotor nennen. Es muss nicht mal was mit Logik zu tun haben, sondern mit Definition, und das Leben ist einfach dumm wenn man, wie du, nicht den Definitionen der Gesellschaft folgt.
Hallo Possetitjel, >> Das mag ja so sein aber, Ein BLDC ist KEIN Synchronmotor. > > Ich schließe mich Thorsten O. an: Bitte zeige mir den konstruktiven > Unterschied AM MOTOR , d.h. an der rotierenden elektrischen > Maschine. Bis hier hin sind wir uns einig, aber... > Wenn ein elektronisch kommutierter Synchronmotor ein BLDC ist, > dann ist auch ein Drehstrom-Asynchronmotor mit angeflanschtem > Umrichter ein BLDC. Nein. Ein Asynchon-Motor ist ein Kurzschlussläufer. BLDC ist eine andere Bezeichnung für permanenterregte Synchronmaschine und damit ein Drehstrommotor (nur eben i.d.R. nicht für den Betrieb am Netz geeignet). Der Umkehrschluss (jeder Drehstrommotor ist ein BLDC) gilt natürlich nicht! MaWins Definition von Drehstrommotor geht scheinbar mehr in die Richtung: Kann direkt am Drehstromnetz betrieben werden. Wenn man das so sieht, ist ein BLDC natürlich kein Drehstrommotor, aber dann wäre ein Synchron-Servomotor auch kein Drehstrommotor. Mit freundlichen Grüßen Thorsten Ostermann
Bitte melde dich an um einen Beitrag zu schreiben. Anmeldung ist kostenlos und dauert nur eine Minute.
Bestehender Account
Schon ein Account bei Google/GoogleMail? Keine Anmeldung erforderlich!
Mit Google-Account einloggen
Mit Google-Account einloggen
Noch kein Account? Hier anmelden.