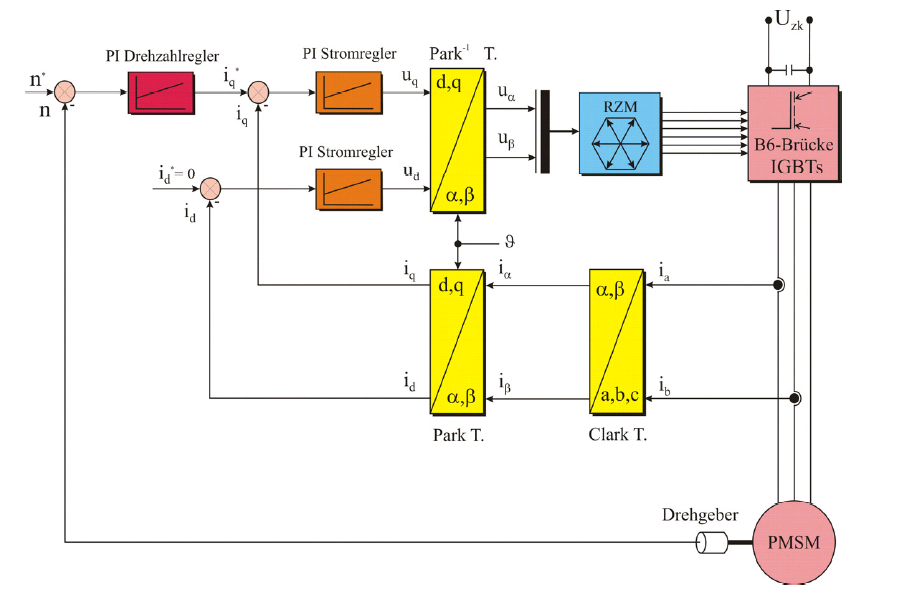
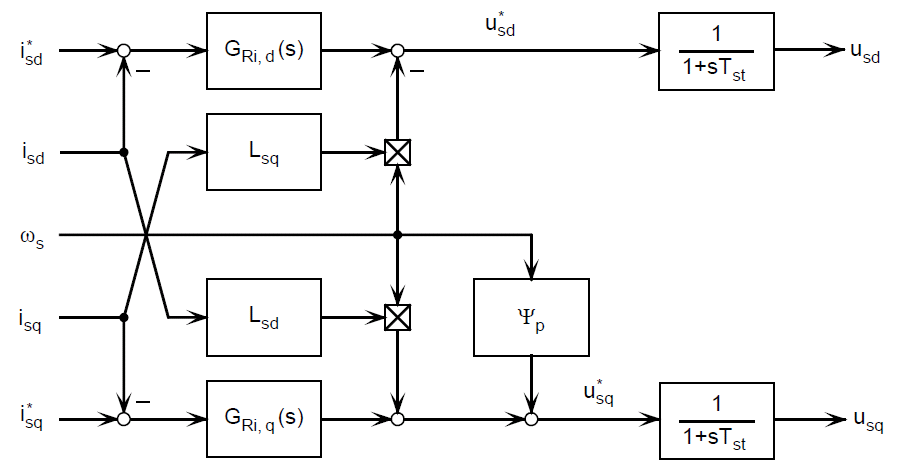
Das Ziel des Regelungsverfahrens "FOC" ist, eine entkoppelte Regelung von Fluss und Drehmoment zu erhalten,um ein Verhalten wie bei eine GNM aufweisen. die Entkopplung der d/q Achse kann über ein Entkopplungsnetzwerk am Ausgang der Stromregler erfolgen, wie im Anhang Entkopplung.PNG gezeigt. Im Anhang FOC_PMSM.PNG ist die allgemeine Struktur der FOC einer PMSM, jetzt habe meine Frage, wo befindet sich das Entkopplungsnetzwerk in der obigen Struktur der FOC einer PMSM? wird es durch andere Struktur aufgehoben oder irgendwo versteckt? Danke! MfG!
Angehängte Dateien:
-

FOC_PMSM.PNG
110 KB -

Entkopplung.PNG
27 KB
Zu Deiner Frage: Im Bild links fehlt die Vorsteuerung, dafür fehlt im Bild rechts die Transformation. Das Entkopplungsnetzwerk ist nichts weiter als eine Vorsteuerung des (statischen) Arbeitspunktes: U1vorst = EMK + j*w*Ls*i1 + R*i1 entsprechend in D/Q aufgeteilt: U1d = - w*Ls*iq + R*i1d + StromreglerD U1q = psi*w + w*Ls*id + R*i1q + StromreglerQ Zu den Vorsteuerspannungen werden dann noch die Reglerausgänge der Stromregler in D/Q-Richtung dazuaddiert. Je nach Geschmack können in die Vorsteuerspannungen dann noch dynamische Spannungsanteile hinzuaddiert werden, daß macht die Steuerung schneller, aufwändiger und instabiler. Theoretisch funktioniert das ganze auch ohne Vorsteuerung, jedoch ist das ganze nicht praktikabel, da viel zu undynamisch. In der Literatur wird aber gerne die Vorsteuerung weggelassen, da meistens nur die reine 2-Komonenten-Regelei beschrieben wird.
OR schrieb: > Zu Deiner Frage: Im Bild links fehlt die Vorsteuerung, dafür fehlt im > > Bild rechts die Transformation. > Das Entkopplungsnetzwerk ist nichts weiter als eine Vorsteuerung des > > (statischen) Arbeitspunktes: > U1vorst = EMK + j*w*Ls*i1 + R*i1 > entsprechend in D/Q aufgeteilt: > > U1d = - w*Ls*iq + R*i1d + StromreglerD > > U1q = psi*w + w*Ls*id + R*i1q + StromreglerQ > Zu den Vorsteuerspannungen werden dann noch die Reglerausgänge der > > Stromregler in D/Q-Richtung dazuaddiert. > Je nach Geschmack können in die Vorsteuerspannungen dann noch dynamische > > Spannungsanteile hinzuaddiert werden, daß macht die Steuerung schneller, > > aufwändiger und instabiler. > Theoretisch funktioniert das ganze auch ohne Vorsteuerung, jedoch ist > > das ganze nicht praktikabel, da viel zu undynamisch. In der Literatur > > wird aber gerne die Vorsteuerung weggelassen, da meistens nur die reine > > 2-Komonenten-Regelei beschrieben wird. hallo OR,danke vorerst für deine Antwort. ich glaube,die Vorsteuerung du meinst,ist: 1/(1+s*T_st) und die dynamische Spannungsanteile sind : -w*L_sq*i_sq und (w*L_sd*i_sd+w*psi) wie im Bild rechts gezeigt. aber ist das Entkopplungsnetzwerk verzichtbar für die FOC einer PMSM,wie im Bild links gezeigt? ich habe ein Modell wie im Bild links aufgebaut und die PI-Regler wie bei GNM durch Kaskadenregelungsverfahren ausgelegt,dann das ganze System funktioniert perfekt. deswegen bin sehr unsicher:ist das Entkopplungsnetzwerk verzichtbar oder es wird schon in der Struktur(im Bild links) integriert? oder kann man so verstehen, dass das System durch die PI-Stromregler schon vollständig entkoppelt wird? Danke! MfG!
Hi, nein, sind einfach zwei unterschiedliche Darstellungen. Links eine feldorientierte Regleung, in der die Vorsteuerung weggelassen wurde, und rechts nur der Teil mit Regler und Vorsteuerung. Der teil mit 1/(1+pT) ist die Nachbildung des Stellgliedes, also des Leistungsteiles. Wenn Du ein richtiges Bild der feldorientierten Regelung brauchst, dann musst Du beide Bilder in eins reinmalen. Grüße OR
OR schrieb: > nein, sind einfach zwei unterschiedliche Darstellungen. Links eine > feldorientierte Regleung, in der die Vorsteuerung weggelassen wurde, und > rechts nur der Teil mit Regler und Vorsteuerung. > Der teil mit 1/(1+pT) ist die Nachbildung des Stellgliedes, also des > Leistungsteiles. ja,das stimmt,der Teil mit 1/(1+s*T_st) ist das Stellglied. aha,ich glaube,die Vorsteuerung du meinst ist das Entkopplungsnetzwerk ich meine: der Teil (-w*L_sq*i_sq) und (w*L_sd*i_sd+w*psi) > Wenn Du ein richtiges Bild der feldorientierten Regelung brauchst, dann > musst Du beide Bilder in eins reinmalen. das bedeutet,ein richtiges Bild der feldorientierten Regelung sollte die Vorsteuerung (Entkopplungsnetzwerk) einschließen. aber wie gesagt: ich habe ein Modell wie im Bild links(ohne Vorsteuerung/Entkopplungsnetzwerk) aufgebaut und die PI-Regler wie bei GNM durch Kaskadenregelungsverfahren ausgelegt,dann das ganze System funktioniert perfekt. warum denn das? ist das Vorsteuerung/Entkopplungsnetzwerk verzichtbar? Grüße!
hat jemand die ähnliche Erfahrung? danke für alle Antworten!
Hi Kim, Das Vorsteuernetzwerk ist verzichtbar. Es kann im statischen Fall über die I-Anteile der Komponentenregler ausgeglichen werden. Versuche bei Nenndrehzahl mal das Drehmoment schnell anzuregeln, dann kippt Deine Regleung ohne Vorsteuerung (Entkopplung) aus den Latschen. Dies liegt daran, das Du dann zeitweise "in die falsche Richtung" regelts. Aber nur Versuch mach Klug. Viel Spaß weiterhin Grüße OR btw: Was hast Du als Maschinensimulation verwendet? Zeig mal das ESB Deiner Streckensimulation.
hi OR, Danke vorerst mal für die Hilfe! OR schrieb: > Das Vorsteuernetzwerk ist verzichtbar. Es kann im statischen Fall über > die I-Anteile der Komponentenregler ausgeglichen werden. Gibt es eigentlich eine theoretische Erklärung? die feldorientierte Regelung sollte auf eine Entkopplung von Fluss und Drehmoment basieren, warum denn funktioniert das auch ohne Vorsteuerung/Entkopplungsnetzwerk? > Versuche bei Nenndrehzahl mal das Drehmoment schnell anzuregeln, dann > kippt Deine Regleung ohne Vorsteuerung (Entkopplung) aus den Latschen. > Dies liegt daran, das Du dann zeitweise "in die falsche Richtung" > regelts. > Aber nur Versuch mach Klug. > Viel Spaß weiterhin > Grüße > OR > btw: Was hast Du als Maschinensimulation verwendet? Zeig mal das ESB > Deiner Streckensimulation. ich habe das Modell in Simulink aufgebaut,aber leider habe es nicht dabei(da die B6C-Brücke für die Spannungsversorgung der PMSM in PLECS realisiert wird, ohne den kann sowieso von zuhause nicht arbeiten:-() aber der Regelkreis sieht änhlich wie im Bild links aus,die Regler werden mit dem Standard-Optimierungs-Verfahren (BO/SO) ausgelegt. btw: Es wird oft jeweils einen „Saturation“-Block hinter dem PI-Regler eingesetzt, um den Windup-Effekt zu unterdrücken. weißt du wie man den oberen Wert und unteren Wert der Begrenzung berechnen? werden der Maximal- und Minimalwert des Ist_Stroms i*_q beim Ausgang des Drehzahlreglers durch Clarke-/Park-Transformation von Nennstrom der Maschine bestimmt? Danke! MfG!
Na, jetzt wird langsm interessant. Zu 1) Wenn Du dass Entkopllungnetzwerk weglässt, dann hast Du genau die Achsenverkopplung von D/Q wieder drin. Das ist im undynamischen Zustand nicht sonderlich tragisch, da die Regler das meist wieder ausgleichen können. Dynamisch wird allerdings tödlich, da dann ein gutgemeinter D-Strom auf einmal einen Q-Strom über die Regler provoziert. -> probier es aus! Die Regler, die Du einsetzt, ersetzten immer nur Teiler Deiner Streckegleichungen, bzw. korrigieren Streckenparameter. Man köönte zb. auch den kompletten Blindflug hinlegen, und gar nicht mehr regleln. Dazu muss man "nur" den Gleichungssatz der elektrischen Maschine kennen und auf dem Controller umsetzten. Der komplette Ständer gleichungssatz ist übrigens in Feldkoordinaten: U1 = psi*w + Ls*j*w*i1 + R*i1 + Ls*di1/dt + dpsi/dt Der letzten beiden Teile werden bei der klassischen FOR aber gerne weggelassen. Die Fehler die dabei prodiziert werden sind nicht von statischer Natur (da Ableitungen) und können ganz leicht vom P-Anteil rausgeholt werden. Zu 2) Die I-Anteile der Regler müssen immer begrenzt werden. hier würde ich 20% der Nennspannung der Maschine empfehlen. Allerdings sollte Dein Eintkopplungsnetzwerk so einestellt sein, dass statisch die Ausgänge der I-Anteile null sind! -> Wichtig!! Die maximalen Ströme bei elektrischen Maschinen liegen üblicherweise bei 200..300% vom Nennstrom. Ist für die Motoren nur eine thermische Geschichte. Dafür gibts dann auch Temperatursensoren zur Übewachung. Also sowohl den Feldstrom Id* und den Drehmomentstrom Iq* einfach auf +-200% im Drehzahlregler und Feldregler begrenzen. Um die nächste Frage gleich vorwegzumehmen -> ja ich weiss, Du hast eine PEM, und da denkts Du, Du brauschst keinen Feldregler. Aber irgendwann willst Du sicher mal eine Feldschwächung machen, und dann kannst Du die Struktur auch gleich ordentlich bauen. Was ist PLECS? Grüße OR
hi OR, Danke vorerst mal! OR schrieb: > Zu 1) Wenn Du dass Entkopllungnetzwerk weglässt, dann hast Du genau die > Achsenverkopplung von D/Q wieder drin. Das ist im undynamischen Zustand > nicht sonderlich tragisch, da die Regler das meist wieder ausgleichen > können. Dynamisch wird allerdings tödlich, da dann ein gutgemeinter > D-Strom auf einmal einen Q-Strom über die Regler provoziert. -> probier > es aus! > Die Regler, die Du einsetzt, ersetzten immer nur Teiler Deiner > Streckegleichungen, bzw. korrigieren Streckenparameter. > Man köönte zb. auch den kompletten Blindflug hinlegen, und gar nicht > mehr regleln. Dazu muss man "nur" den Gleichungssatz der elektrischen > Maschine kennen und auf dem Controller umsetzten. Der komplette Ständer > gleichungssatz ist übrigens in Feldkoordinaten: > U1 = psi*w + Ls*j*w*i1 + R*i1 + Ls*di1/dt + dpsi/dt > Der letzten beiden Teile werden bei der klassischen FOR aber gerne > weggelassen. Die Fehler die dabei prodiziert werden sind nicht von > statischer Natur (da Ableitungen) und können ganz leicht vom P-Anteil > rausgeholt werden. ich werde mal ausprobieren, gucke mal wie sich die Maschine im dynamischen Zustand verhält. > Zu 2) Die I-Anteile der Regler müssen immer begrenzt werden. hier würde > ich 20% der Nennspannung der Maschine empfehlen. 20% der Nennspannung ? > Allerdings sollte Dein Eintkopplungsnetzwerk so einestellt sein, dass > statisch die Ausgänge der I-Anteile null sind! -> Wichtig!! stellt das Entkopplungsnetzwerk ein? Ein Entkopplungsnetzwerk sieht wie im Bild rechts aus,wie kann man es noch einstellen? > Die maximalen Ströme bei elektrischen Maschinen liegen üblicherweise bei > 200..300% vom Nennstrom. Ist für die Motoren nur eine thermische > Geschichte. Dafür gibts dann auch Temperatursensoren zur Übewachung. > Also sowohl den Feldstrom Id* und den Drehmomentstrom Iq* einfach auf > +-200% im Drehzahlregler und Feldregler begrenzen. eigentlich suche die ganze Zeit nach Literatur zu diesem Thema,aber leider immer nicht gefunden. stammt die obige Erklärung aus deiner praktischen Erfahrung oder der Literatur?kann du mir einige Literaturen über diesen Thema vorschlagen? > Um die nächste Frage gleich vorwegzumehmen -> ja ich weiss, Du hast eine > PEM, und da denkts Du, Du brauschst keinen Feldregler. Aber irgendwann > willst Du sicher mal eine Feldschwächung machen, und dann kannst Du die > Struktur auch gleich ordentlich bauen. Danke für den Vorschlag,aber der Betrieb im Feldschwächbereich wird vorerst nicht berücksichtigt. > Was ist PLECS? PLECS ist ein Schaltungssimulator,guck mal hier: http://www.plexim.com/de/ jetzt möchte der Drehzahlregler im FOC durch einen PI-Zustandregler ersetzen (zur Vereinfachung werden die PI-Stromregler weiterhin beibehalten).hast du Erfahrungen damit? kann ich die PI-Stromregler weiterhin durch Betragsoptimum auslegen? mit welches Verfahren kann ich die PI-Zustandregler am besten auslegen? Polzuweisung? LQR? hast du eine Idee? es gibt viele Regelungsverfahren oder Algorithmen,wie z.B. FOC,DTC,Fuzzy,Neuro usw..welches/welcher hat bessere Aussicht? oder welches/welcher passt am besten zu der digitalen Regelung? Danke nochmals für die hinreichenden Vorschläge! MfG!
-> Ja 20% der Maschinennennspannung
-> Das Entkopplungsnetzwerk enthält Ls,R1,psi,nist. Diese Werte müssen
alle stimmen. Wenn die nicht passen, dann bekommst Du Abweichungen im
statischen Arbeitspunkt, die der I-Anteil der Stromregler ausgleichen
muss. Man geht am besten so vor:
- einstellen des Leerlaufpunktes bei Nenndrehzahl -> Einstellen und
überprüfen vom Flussmodell
- Einstellen des Nennpunktes -> einstellen von Ls/R1 (R1 ist norm.
unwichtig, hängt aber von Deiner Maschinengröße ab.)
Zum Thema Literatur:
Hier kann ich Dir den Schröder empfehlen, sehr teuer und sehr gut:
("Elektrische Antriebe - Regelung von Antriebssystemen Schröder,
Dierk")
Das Buch habe ich selber aber auch nicht.....
Falls Du mal sehen willst, wie die Profis sowas machen, kannst Du ein
bischen in der Doku zu Industriestromrichern auf die Suche gehen.
Noch ein kleiner Tipp zu Abschluss: Es ist nicht sehr weise, die Regler
so kompliziert zu machen. Die gesamte Steuer/Reglerstruktur muss sich an
der Physik orientieren. Falls Du Dynamikprobleme hast, ist normalerweise
nicht der Regler schuld, sondern Du hast ein Strukturproblem.
Normalerweise reicht ein PI-Regler völlig. Wenn Du einen PID-Regler
einsetzen willst, dann musst Du schon sehr viel über die Strecke wissen,
und dieses Wissen über die Strecke muss bei allen Arbeitspunkten (alle
Lastzustände, Umgebungstemperaturen, Rotortemperaturen,
Sättigungsverhalten) bekannt sein, ansonsten riskierst Du
Instabilitäten.
Ich lege die Regler übrigens immer nur nach "Gefühl" aus.
Trotzdem viel Spaß dabei
OR
-> für das Thema zur Bestimmung des oberen/unteren Werts der Begrenzung bin immer noch nicht ganz klar... der Buch von Schröder habe dabei,aber leider finde keine Info. für dieses Thema.Wahrscheinlich kannst du nochmal ins Detail gehen? leider muss schon wieder losgehen,die Reste lese ich heute Nacht wenn ich wieder zuhause bin. danke vielmals! Grüße!
Angehängte Dateien:
-

PI-Regler.png
17 KB
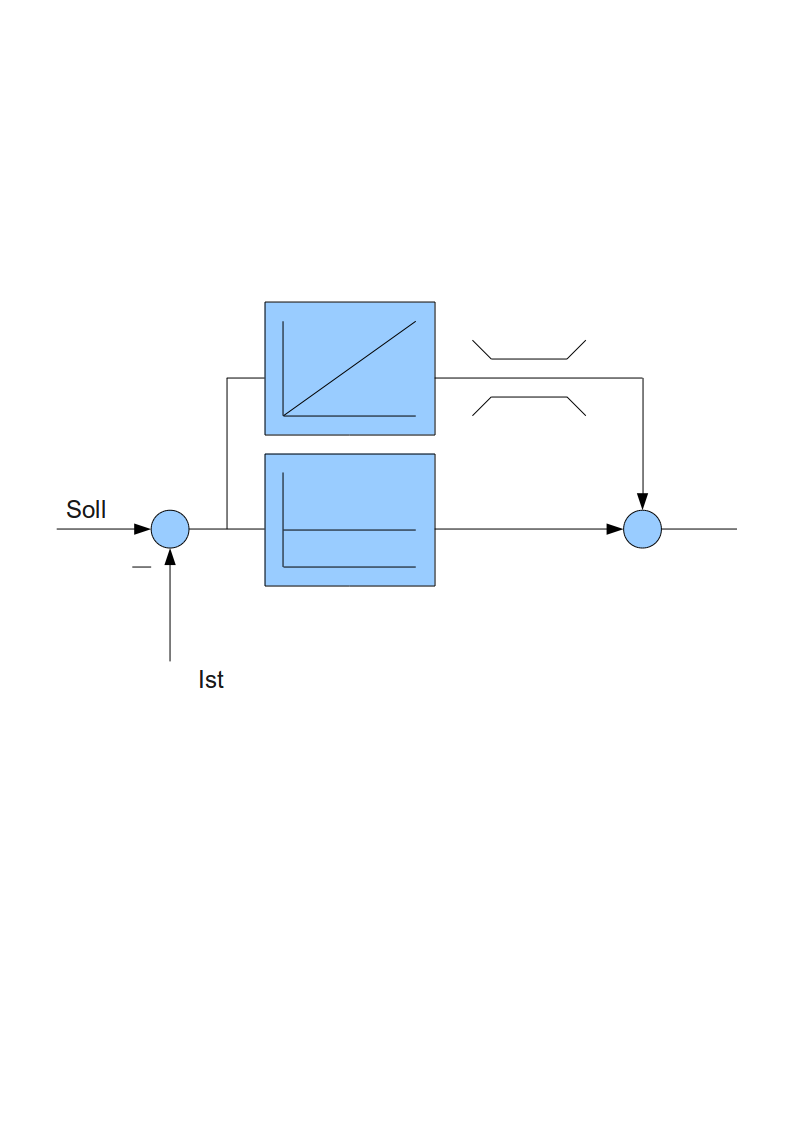
Die beiden Stromregler in D/Q Richtung sollen nur kleine Streckenfehler ausgleichen (I-Anteil) und die Dynamik einstellen (P-Anteil). Wenn Du den I-Anteil nicht begrenzt, dann führen Orientierungsfehler bzw. Fehler im Vorsteuernetzwerk schnell dazu , dass sich der Regler "vollsaugt". Wenn der I-Anteil erstmal bei 100% ist, dann hast Du sowieso schon die maximale Motorspannung erreicht, also damit keinerlei Regelreserve mehr. Ohne Regelreserve geht auch der P-Anteil nicht mehr -> dumm gelaufen -> Maschinenregelung schmiert ab. Gleichzeitig führt ein über die Zeit konstanter I-Anteil aber dazu, dass Du einen Orientierungsfehler bekommst/hast. Ist auch sehr unschön, wenn Du Drehmomentbildenden Strom denkst zu geben, und dabei aber auch noch das Feld schwächst.. Ich habe mal angehängt, wie "mein" PI-Regler so grob ausschaut. Du musst Dir darüber klar werden, für was Du die Regler eigentlich benötigst! Grüße OR
Hi OR, Danke vorerst mal für die detailierten Erklärungen! jetzt habe nur noch eingie Fragen: OR schrieb: > Die I-Anteile der Regler müssen immer begrenzt werden. hier würde > ich 20% der Nennspannung der Maschine empfehlen. meinst du,u_d & u_q auf 20% der Nennspannung begrenzt werden? wanrum denn 20%? findet man diseren Erfahrungswert in der Literatur? > Die maximalen Ströme bei elektrischen Maschinen liegen üblicherweise bei > 200..300% vom Nennstrom. Ist für die Motoren nur eine thermische > Geschichte. Dafür gibts dann auch Temperatursensoren zur Übewachung. > Also sowohl den Feldstrom Id* und den Drehmomentstrom Iq* einfach auf > +-200% im Drehzahlregler und Feldregler begrenzen. so hier meinst du Id* und Iq* auf +-200% des Nennstroms begrenzt. zuerst muss ich das ganze System simulieren. eigentlich müssen die Ströme bei elektrischen Maschinen(hier i_a, i_b, i_c) auf die erlaubten Werte (hier Annahme: der maximale Strom i_max=+-200% * i_nenn ) begrenzt werden. so ich muss nur den i_max durch Park/Clark in i_d/i_q transformieren,dann bekomme die Begrenzungswerte für die Ströme. oder? dann wir bekommen auch die Begrenzungswerte für die Spannungen.(aber ich finde,die Begrenzung für die Spannungen sind verzichtbar,da die Ströme schon begrenzt werden,oder?) PS:weißt du gibt es ein gutes Forum für Regelungstechnik / elektr. Maschinen?ich möchte gerne noch wissen,welches/welcher Regelungsverfahren oder Algorithmen eine gute Aussicht hat? oder welches/welcher am besten zu der digitalen Regelung passt. danke nochmals Grüße!
Hallo, ich befasse mich zur Zeit mit dem Thema der Feldorientierten Regelung, da ich bisher nur die Theorie studiert habe und bisher keine Proktische erfahrung sammeln konnte möchte ich hier nicht mit halbwissen um mich werfen, daher zuerst zwei Buchempfehlungen. Nguyen Phung Quang, Jörg-Andreas Diettrich - Praxis der feldorientierten Drehstromantriebsregelungen (Konnte es nur über die fernleihe bekommen, kaufen war nirgends möglich allerdings ist dieses Buch auch in Englisch erschienen) Nguyen Phung Quang, Jörg-Andreas Dittrich - Vector Control of Three-Phase AC Machines (Gleiches Buch, nur englisch, etwas neuer und ca. 50 Seiten mehr Inhalt, kann allerdings nicht sagen ob wirklich mehr drinsteht) Dierk Schröder - Elektrische Antriebe Regelung von Antriebssystemen (Viel Mathematik und Theorie, allerdings auch sehr umfassend) Soo, ich denke in diesen Büchern und dem Internet findet man alles was man wissen muss, eventuell für die Herleitungen der Signalflusspläne der PMSM noch Band 1 von Schröder - Elektrische Antriebe Grundlagen Wenn ich die Informationen aus "Elektrische Antriebe Regelung von Antriebssystemen" richtig Interpretiere entfällt die Entkopplung durch die Annahme Ld=Lq=L1 sprich keine Reluktanzeinflüsse bei einer PMSM mit Aufgesetzten Magneten (nicht eingebettet) und der Regelung von Id=0 dadurch erhält man einen vereinfachten Signalflussplan bei der die Entkopplung nicht notwendig ist mit der Zusatzbedingung Ud=-w*L_sq*i_sq Alles unter vorbehalt, ich arbeite mich selbst grade in das Thema. MfG Wilfried
Also das mit den Reluktanzeinflüssen ist Quatsch, hab mich versehen, gilt ja genauso bei anderen Maschinen als der Permanentmagneterregten Synchronvollpolmaschine... hier nochmal ein paar mir nütlich erscheinende Links: http://www.iast.ch/sem-diplomarbeiten/2001/Christen-Schweizer/Html/Diplomarbeit.pdf http://home.vrweb.de/~hsteinhart/Antriebe_2/Dynamik_el_Antriebe.pdf Laut den Infos aus dem zweiten link gelingt die Entkopplung durch die umsetzung ins läuferflussorientierten Bezugssystem. Hoffe ich konnte mehr helfen als verwirren ;)
Und nochmal ums vollständig zu machen, Das oberste Bild rechts ist im statorfesten Koordinaten System und durch die Umsetzung ins Läuferflussorientierte System mittels Park/Clarke ist die entkopplung nicht mehr notwendig, das linke Bild ist somit vollständig für eine Feldoreintierte Regelung.
Okay, jetzt hab ich schon wieder quatsch erzählt, hör auf den OR, der hat recht... Aber hoffe die links sind trotzdem hilfreich ;)
hi Wilfried , danke für deine Vorschläge. das Skript von FH Aalen finde sehr gut. PS:studierst du an FH Aalen? Gruß
Hi Kim, wie schauen Deine Simulationen aus? Funktioniert schon was? Grüße OR
Hey, ich studiere nicht an der FH Aalen, sondern an der Stenden Hogeschool in den Niederlanden. Ich helfe gerne, allerdings könntest du mir eventuell auch weiter helfen, ich wäre dir sehr dankbar wenn du mir auch dir nützlich erscheinde Links oder Skripte zukommen lassen könntest oder eventuell sogar ein paar deiner Untersuchungsergebnisse und Unterlagen, ich stecke noch mitten in den vorbereitungen zu meiner Bachelor Thesis und kann jede Information gebrauchen ;) Ich finde den Übergang von der Theorie zur Umsetzung bzw. Dimensionierung der Regler etc. noch etwas schwierig, das allgemeine Prinzip habe ich verstanden und werde mich auch bald daran machen eine kurze abhandlung darüber zu schreiben, wenn sie fertig ist werde ich sie gern zur verfügung stellen. Gruß Wilfried
zu Wilfried, ich habe schon viele stoffe gelesen,und finde jetzt, nicht je mehr desto besser, man braucht nur einen guten Buch,wie z.B.: "Elektrische Antriebe – Regelung von Antriebssystemen" ich glaube,du hast schon alles was du brauchst.lies mal deine Stoffe,dann findest langsam deinen zum Ziel. wenn du probleme hast,kann du hier aufstellen.viele leute sind hilfsbereit. zu OR, danke OR,ich bekomme schon sehr gutes Ergebnis,jetzt muss nur noch einigen Kleinigkeiten klären. wie z.B. wie kann man den Puls-Umrichter exakt modellieren.(ich finde ja die Modellbildung des Stromrichters für GM,aber leider noch keine für die Drehstrommaschine) letztes mal hast du erklärt, wie wird die Reglerausgangsbegrenzung bestimmt, ich suche im Moment die theoretische Erklärung.
Für alle die sich mit dem Thema befassen und auch auf diesen Thread stoßen sei hier noch folgendes ebook erwähnt: http://e-collection.ethbib.ethz.ch/view/eth:30738 Hat mir beim verständnis des Umrichters und der Steuerverfahren sehr geholfen und ist frei erhältlich. Eventuell hilft es dir ja auch bei der Modellierung allerdings wird das im Buch nicht direkt behandelt. Das Folgende PDF behandelt in Kapitel 2 die Modellbildung einer PMSM mit berücksichtigung des Umrichters. http://rzbl04.biblio.etc.tu-bs.de:8080/docportal/servlets/MCRFileNodeServlet/DocPortal_derivate_00007758/DISS.PDF;jsessionid=BEFB7D7D81F31399BB148C4EA6BB6225
Hi Wilfried, danke vorerst für deine ebooks. jetzt habe eine Problem: Beitrag "Dimensionierung eines Tiefpass –Filters für die Stromistwerterfassung in dem Regelkreis" hast du eine Idee? Danke, Grüße!
Bitte melde dich an um einen Beitrag zu schreiben. Anmeldung ist kostenlos und dauert nur eine Minute.
Bestehender Account
Schon ein Account bei Google/GoogleMail? Keine Anmeldung erforderlich!
Mit Google-Account einloggen
Mit Google-Account einloggen
Noch kein Account? Hier anmelden.