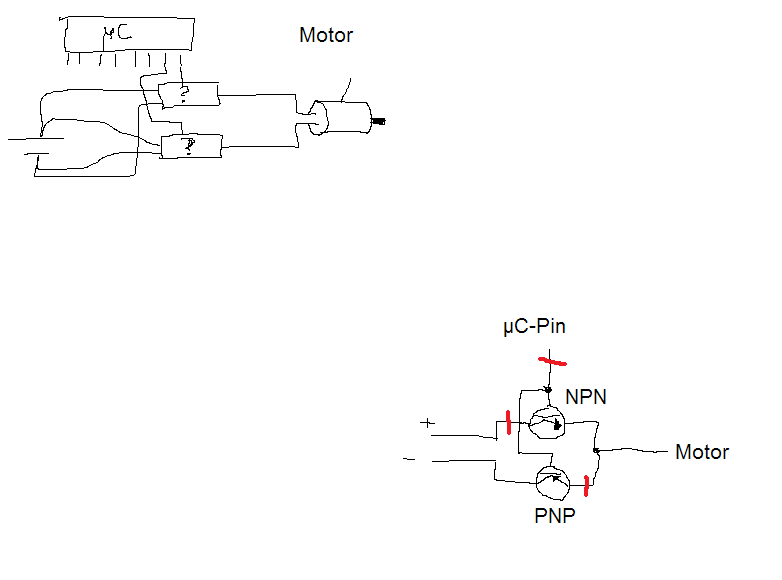
Hallo, mein Problem ist eigentlich wohl am Besten aus der angehängten Skizze ersichtlich. Angenommen, ich will einen normalen Gleichstrommotor mit 5V/6V mit 2 Pins so steuern, dass er vorwärts läuft (Pin 1 an, Pin 2 aus), rückwärts läuft (Pin 1 aus, Pin 2 an) oder gar nicht läuft (beide Pins aus). Wie muss ich das ?-Bauteil wählen, damit das funktioniert? Würde der Vorschlag in der rechten unteren Ecke funktionieren? Müssen bei den roten Strichen Lastwiderstände hin? Übrigens soll der Strom am Motor bei etwa 1A liegen. D.h. ich müsste ja wahrscheinlich statt den Bipolartransistoren FETs nehmen, oder? Darlington-Transistoren wären wegen zu langer Schaltzeit bei PWM wahrscheinlich nicht so gut geeignet. Der µC hat natürlich das gleiche Masseniveau wie der Minuspol der Batterie. Die Transistor-Artikel haben mir leider nur bedingt weitergeholfen, für eure Verhältnisse bin ich sicherlich nicht so fit in Elektronik. P.S.: Eigentlich soll da ein Schrittmotor dran, das Schaltprinzip müsste ja aber das Gleiche sein. mfg 0xUnbenannt
Angehängte Dateien:
-

Schaltungsskizze.png
4,6 KB
Google: Ansteuerung Motoren / Schaltungen + Motoren / Bücher Antriebstechnik
@0xUnbenannt (Gast) >Pins aus). Wie muss ich das ?-Bauteil wählen, damit das funktioniert? Du brauchst eine H-Brücke, siehe H-Brücken Übersicht. >P.S.: Eigentlich soll da ein Schrittmotor dran, Und warum sagst du das nicht gleich? Lies mal was über Netiquette. Und das Thema Schrittmotoren. MFG Falk
Da braucht man ausgangsseitig nicht so viel Ahnung von Elektronik, eher von Logik und dann erst kommt die Umsetzung in Elo! Polwendeschaltung für normale E-Motoren, bei Schrittmotoren ganz anders.
So, das sieht ja doch etwas anders aus für Schrittmotoren. (vor allem sieht das alles kompliziert aus =( ) H-Brücken wie diese sind ja nur für Gleichstrommotoren gut: http://www.mikrocontroller.net/part/ZXMHC6A07T8TA Ansteuerung laut Wikipedia mit sagenhaften 4 Gates: http://de.wikipedia.org/wiki/Vierquadrantensteller Für Schrittmotoren sollte man laut Roboternetz.de ja am Besten solche Extra-Bauteile benutzen: http://www.rn-wissen.de/index.php/Schrittmotoren#Schaltung_zum_Ansteuern_eines_Schrittmotors_mit_L298_und_L297 Soweit ich das sehe, sollte man da ja CW/CCW, Clock, Enable und RESET mit dem µC verbinden, es reichen anscheinend auch 3 Pins. Vref verwirrt mich insofern etwas, als ich nicht weiß, was mit Rs gemeint ist. Außerdem frage ich mich, ob oder warum ich da jetzt 36V anlegen soll, schließlich braucht mein Schrittmotor nur 5V. Noch eine Frage: Um einen Getriebemotor ganz normal vorwärts fahren zu lassen (ohne Polwende), braucht man aber keine Brücke, sondern nur ein FET, oder?
Oder. Der FET sollte dann doch ein n-Kanal-MOSFET sein und eine Damperdiode drinhaben. Sowohl für Spannung als auch Strom maßlos überdimensionieren! Nicht dran stören, Leute, denn bei dem Wissen, das er hat, wäre er wohl mit Schaltzeiten, An-Widerstand, Verlustleistung usw. noch überfordert. Gruß - Wolfgang
Bei der Schaltung wird der Strom durch die Schrittmotorwindungen geregelt. Damit der Strom trotz Windungsinduktivität schnell ansteigt, wird er mit hoher Spannung betrieben. Sonst bricht das Drehmoment deines Motors bei höheren Schrittfrequenzen dramatisch ein. mfg Gast
G a s t schrieb: > Bei der Schaltung wird der Strom durch die Schrittmotorwindungen > geregelt. Damit der Strom trotz Windungsinduktivität schnell ansteigt, > wird er mit hoher Spannung betrieben. Sonst bricht das Drehmoment deines > Motors bei höheren Schrittfrequenzen dramatisch ein. > > mfg Gast Was willst du mir damit sagen? Es steht 5 V dabei, ich brauche auch keine hohen Schrittfrequenzen.
0xUnbenannt schrieb: > as willst du mir damit sagen? Genau das, was er schrieb. Falls Du Deinen Schrittmotor nicht mit Spezial-ICs wie von Trinamic betreiben willst, sondern mit einer H-Brücke und eigener PWM-PID-Regelung, achtest Du besser gleich auf eine ausreichend hohe Motorendstufen-Betriebsspannung. Ich nehme dafür den LMV18200. > Es steht 5 V dabei, ich brauche auch keine hohen Schrittfrequenzen. Dann freue Dich doch! Damit ist das Thema wohl ausdiskutiert. Gruß - Wolfgang
Wolfgang schrieb: > 0xUnbenannt schrieb: >> as willst du mir damit sagen? > Genau das, was er schrieb. Falls Du Deinen Schrittmotor nicht mit > Spezial-ICs wie von Trinamic betreiben willst, sondern mit einer > H-Brücke und eigener PWM-PID-Regelung, achtest Du besser gleich auf eine > ausreichend hohe Motorendstufen-Betriebsspannung. Ich nehme dafür den > LMV18200. > >> Es steht 5 V dabei, ich brauche auch keine hohen Schrittfrequenzen. > Dann freue Dich doch! Damit ist das Thema wohl ausdiskutiert. > > Gruß - Wolfgang Da ist mir noch ein bisschen viel Bahnhof dabei, von daher kann ich mich wohl vorerst noch nicht freuen. Ich dachte eigentlich nicht, dass ich für den Schrittmotor PWM brauche. Läuft er dadurch flüssiger? Dann sieht es ja so aus, als hätte diese H-Brücke 2 Ausgänge für den Motor, aber 4 Gates. Für den Schrittmotor brauche ich ja 4 Ausgänge, ich kann aber nur 4, allerhöchstens 6 Pins dafür verwenden. Zum LMV18200 findet Google keinen einzigen Treffer. Hast du einen Link dazu? Was du mit PID und Motorendstufen-Betriebsspannung meinst, weiß ich nicht, vielleicht finde ich am Wochenende noch Zeit zum Suchen, aber ihr müsst mich auch verstehen, ich habe allein für meinen vorletzten Post eine geschlagene Stunde lang gesucht, hinzu kommt die Suche nach Motortypen etc.
Ja, 4 Gates, 2 Motoranschlüsse. Bei einem Schrittmotor also 8 Gates, 4 Motoranschlüsse. Man kann die H-Brücken auch fertig kaufen, das reduziert die Zahl der Steuereingänge auf 2 oder 4 für einen Schrittmotor. Deshalb habe ich den 18200er genannt, leider mit einem falschen Buchstaben. Richtig ist: LMD18200. Verzeihung, ich sollte die Angaben nicht müde aus dem Kopf holen. PID, PWM usw. kannste 'mal in Wikipedia nachschlagen - sind alltägliche Begriffe in der Regeltechnik. Gruß - Wolfgang
Hallo, Danke für das konkrete Bauteil! Ich habe nochmal ein bisschen nachgeschaut und die folgenden Links haben mir sehr geholfen: http://thinksilicon.de/6/Der-unipolare-Schrittmotor.html http://thinksilicon.de/7/Der-bipolare-Schrittmotor.html Zum einen verstehe ich jetzt die H-Brücke besser, zum anderen denke ich, ich werde wohl lieber einen unipolaren Schrittmotor nehmen und den einfach mit so einem n-Mosfet ansteuern, auch wenn ich bisher nur einen mit 24V gefunden habe. Ich nehme mal an, es gibt keine (einfachen) elektronischen Bauteile, mit denen man z.B. 5V/1A in 25V/0,2A umwandeln kann, liege ich da richtig? http://www.pollin.de/shop/dt/NTQ2OTg2OTk-/Motoren/Schrittmotoren/Schrittmotor_HOWARD_Ind_1_19_4201.html Zu den Transistoren gibt's ja dann hier Links: http://www.mikrocontroller.net/articles/Standardbauelemente#N-MOSFET Da sähe für mich z.B. einen IRLZ34N gut aus oder ein IRLR2905/IRLU2905, weil ich sowieso bei Conrad noch etwas brauche.
Bitte melde dich an um einen Beitrag zu schreiben. Anmeldung ist kostenlos und dauert nur eine Minute.
Bestehender Account
Schon ein Account bei Google/GoogleMail? Keine Anmeldung erforderlich!
Mit Google-Account einloggen
Mit Google-Account einloggen
Noch kein Account? Hier anmelden.