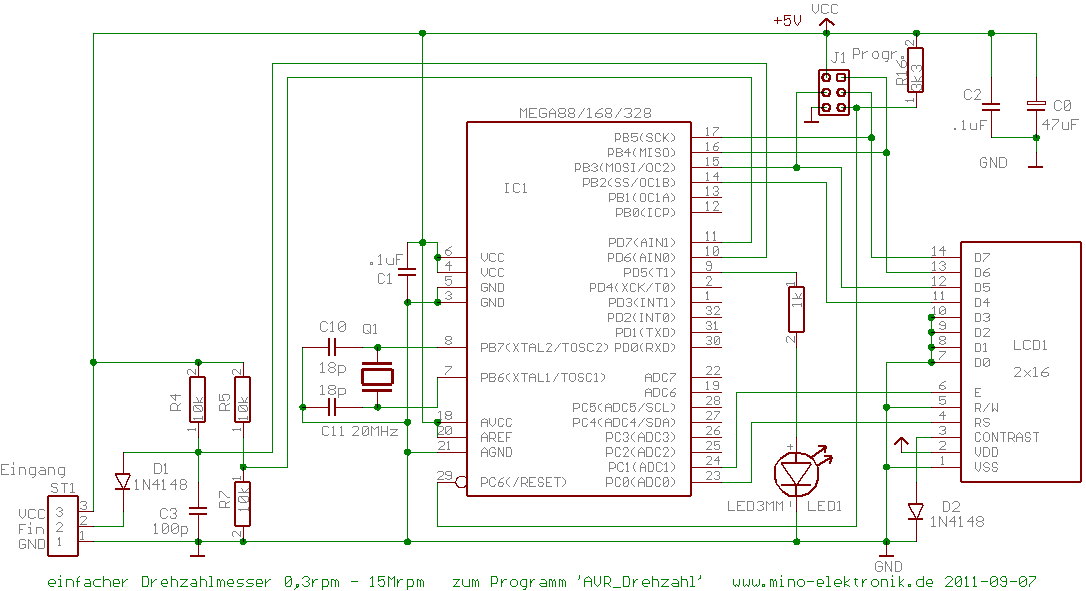

Anbei eine Schaltung und ein Programm für einen einfachen Drehzahlmesser. Das Programm wurde unter AVR-Studio 4.18 entwickelt. Zum Einrichten eines eigenen Projektes reicht die angehängte .c-Datei sowie die Einstellungen F_CPU = 2000000 sowie CPU = ATmega88. Die 'fuses' werden für max. ext. Quarz gewählt und BOD auf 4,3V gesetzt. Die Schaltung ist einfach: sie besteht aus einem ATmega88, einer LC-Anzeige 2x16 und wenigen passiven Bauteilen besteht. Das Programm ist einfach: eine einzige .c-Datei, die mit den Grundeinstellungen des AVR-Studio übersetzt wird. Das Programm: Gemessen wird im Grunde die Eingangsfrequenz; angezeigt werden Drehzahl ("D") und Zeit_pro_Umdrehung ("T") als 6-stellige Werte (gerundet). Die Berechnungen werden mit den 'float'-Routinen des AVR-GCC durchgeführt; das Programm benötigt ca. 5,4KB Programmspeicher. Gemessen wird lückenlos - jede Sekunde ein neuer Wert bei 60 rpm - und angezeigt werden maximal drei Ergebnisse/s; eine LED signalisiert eine fertige Messung. Zur Schaltung: Der Prozessor ist mit der Anzeige gemäß Schaltbild verdrahtet; die Pinbelegung ist 'historisch' gewachsen (beruht auf einem abgemagerten Frequenzzähler). Das Eingangssignal wird über den analogen Komparator dem ICP des Timer1 zugeführt. Das hat den Vorteil, dass die Eingangsbeschaltung variabel ausgelegt und bei Bedarf die Eingangsempfindlichkeit auf einige 10mV erhöht werden kann. So lassen sich z.B. R4 und C3 als Widerstände 2M2 bestücken und D1 gegen einen Kondensator 100nF austauschen, wenn sehr kleine Drehzahlen nicht erwartet werden. An anderer Stelle befindet sich noch ein Vorschlag für eine Eingangsstufe, mit denen man auch unsaubere Eingangssignale für die Drehzahlmessung aufbereiten kann. Beitrag "Eingangsstufe für Frequenzzähler DC-50MHz, +5V"
Angehängte Dateien:
-

AVR_drehzahl.png
12 KB -

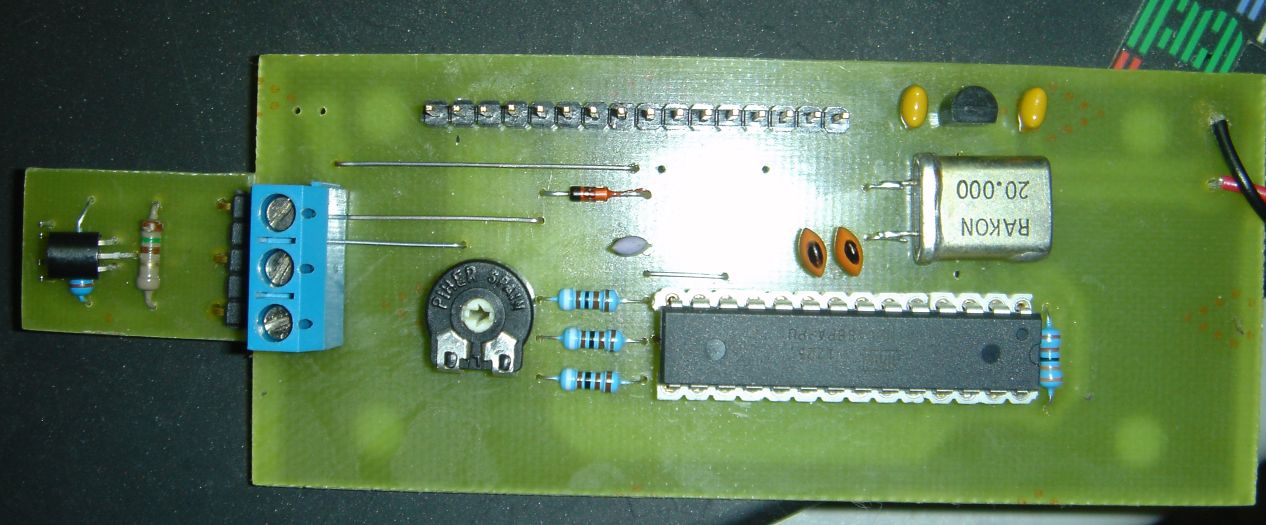
Drehzahl_1_2_1.jpg
16 KB
Geschickterweise hänge ich noch die .hex-Datei an. Und wem dies nicht reicht, programmiere ich auch gerne zugeschickte Prozessoren im DIL28-Gehäuse.
Der Code ist ja noch einfacher als ich dachte, vielen Dank!
Hallo, folgender codeausschnitt verstehe ich nicht ganz:
1 | for(;;) { |
2 | if(mess_status==MESSEN && mess_dauer >= MESSZEIT) { |
3 | mess_status=AUSLESEN; // Auswertung starten |
4 | mess_dauer = 0; // wieder Messzeit abwarten |
5 | }
|
6 | if(mess_status==AUSWERTEN) { |
7 | end_zeit = zeit_high*0x10000 + zeit_low; |
8 | mess_zeit = end_zeit - start_zeit; // Zeit-Differenz bilden |
9 | start_zeit = end_zeit; // neue startzeit merken |
10 | mess_ereignisse = end_ereignis - start_ereignis; // Impuls-Differenz |
11 | start_ereignis = end_ereignis;// fuers naechste Intervall |
12 | mess_status = MESSEN; // wieder warten |
13 | if(messwert_vorhanden) { |
14 | led_cnt = LED_EIN; // LED-Zeit vorgeben |
15 | frequenz = ((float)mess_ereignisse * F_CLOCK) / mess_zeit; // Frequenz berechnen |
16 | lcd_cmd(ZEILE1+5); // 1.Zeile, 5.Spalte |
17 | zeige_x(frequenz,0); // Drehzahl anzeigen |
18 | lcd_cmd(ZEILE2+5); // 2.Zeile, 5.Spalte |
19 | zeige_x(frequenz,1); // Zeit/Umdr. anzeigen |
20 | }
|
21 | else messwert_vorhanden = 1; // sperre wieder aufheben |
22 | }
|
23 | }
|
24 | return(815); |
25 | }
|
26 | |
27 | lcd_cmd(ZEILE1+5); // 1.Zeile, 5.Spalte |
28 | zeige_x(frequenz,0); // Drehzahl anzeigen |
29 | lcd_cmd(ZEILE2+5); // 2.Zeile, 5.Spalte |
30 | zeige_x(frequenz,1); // Zeit/Umdr. anzeigen |
gibst du damit nicht auf beiden Zeilen das selbe aus? mfg Lukas
Lukas schrieb: > gibst du damit nicht auf beiden Zeilen das selbe aus? Sieh Dir bitte weiter oben an: "void zeige_x(float x,char zeige_periode)" Bei 'zeige_x(frequenz,0)' wird die Drehzahl (ursprünglich die Frequenz) und anderfalls die Periodendauer angezeigt. Das obige Foto entstand bei ca. 1,2kHz Eingangsfrequenz; einmal x*60 skaliert und in der 2. Zeile mit 1/x.
Vielleicht ist es niemandem aufgefallen und es wird äußerst selten zu
'unsauberer' Auswertung führen, aber nachfolgender Programmabschnitt
sollte vor einem T1OV-Interrupt geschützt werden. 'mess_dauer' kann
sonst falsch gelesen oder gelöscht werden.
Die Sperre für TOIE1 habe ich hier ergänzt:
TIMSK1 &= ~(1<<TOIE1); // t1OV interrupt sperren
if(mess_status==MESSEN && mess_dauer >= MESSZEIT) {
mess_status=AUSLESEN; // Auswertung starten
mess_dauer = 0; // wieder Messzeit abwarten
}
TIMSK1 |= (1<<TOIE1); // t1OV interrupt freigeben
Kann man diese Schaltung auch so mit einem Hallsensor betreiben? Welchen Umbau braucht man für einen Reedkontakt?
Als Hallsensor sollte ein TLE4905 direkt anschließbar sein. R4 ist der Pullup für den OC-Ausgang. Bei einem Reedkontakt würde ich in Reihe zum Kontakt 1k legen und C3 soweit vergrößeren, dass bei max. Schaltfolge die Signalamplitude an AIN0 maximal 1,5V unter- und minimal 3,5V überschreitet. Als experimentellen Startwert würde ich mit 10nF beginnen, was grob einer Eingangsfrequenz von 10kHz entsprechen würde. Das Tastverhältnis ist aber zu berücksichtigen. Der 1k Widerstand schützt den Reedkontakt vor zu großen Entladeströmen. Wenn kein Schmutz auftreten kann, kann man auch mit Reflexkopplern arbeiten. Ein bißchen Alufolie auf dem Drehteil erzeugt kaum Unwucht.
Ich befürchte das geht nur an den AIN Ports. Diese sind bei mir schon besetzt. Gibt es noch andere Ports woran das ganze geht?
Maximilian A. schrieb: > Gibt es noch andere Ports woran das ganze geht? Genausogut kannst Du ICP1 nehmen. Dazu mußt Du diese Anweisung entfernen: ACSR |= 1<<ACIC; Eine weitere Schaltung findest Du auch hier: Beitrag "4-Kanal Drehzahlmessung mit ATmega88" und noch mehr Beschreibungen auch hier: http://www.mino-elektronik.de/fmeter/neue_versionen.htm
Jetzt habe ich noch eine Frage: wie bekomme ich das ganze auf den ATMEGA644 portiert? Theoretisch müsste ich doch nichts am Code verändern. Das Signal wir in PD6 gespeist, oder? Ich würde nämlich gerne das ganze auf dem Webserver von Ulrich Radig laufen lassen
Das Programm zu portieren sollte kein Problem sein. ICP als Eingang ist auch in Ordnung. Was den Webserver angeht: den kenne ich nicht. Dazu muß man wissen, welche Timer, I/O und Interrupts dort verwendet werden und ob dies mit der Drehzahlmessung kollidiert. Für ein Einzelstück würde ich der Drehzahlmessung einen eigenen Prozessor spendieren und die Meßwerte per UART an den Webserver übertragen. Da stören sich die Programme nicht und man ist auf der sicheren Seite.
Hallo Leute. Ich komme hier wirklich nicht weiter und nach langem Überlegen habe mich doch entschlossen kein Internet Forschung mehr in diesem Fall zu betreiben. Vielleicht hilft mir hier jemand der "sich besser auskennt". Ich versuche die möglichst Übersichtig mein Problem zu erklären : Ich versuche seit tagen die Messung an ein ATmega8 und mein Display anzupassen und habe bis jetzt folgendes geändert: -TMSK1 in TMSK unbenannt - da an ATmega 8- so steht bei Atmel -lcd_routines.c mit meiner LCD Konfiguration eingebunden - die sind ok. - im Code folgendes unbenannt: --int_lcd in lcd_init von lcd_routnes --lcd_f_str in lcd_string von lcd_routines. An der Schaltung hängt ein Lüfter- das Schwarze Tachokabel an PD6 ( (AIN0) .Ich bekomme jetzt nur D: und T: auf dem Display angezeigt. Keine 000 keine ??? - überhaupt kein Wert, Ich gehe davon aus dass noch was in der LCD Einbindung verändert werden muss. Das Programm lässt sich fehlerfrei und Warnungsfrei kompilieren. Kann mir da bitte jemand bei der Einbuindung von lcd_routines ein Tipp geben ?
>-lcd_routines.c mit meiner LCD Konfiguration eingebunden - die sind ok. Beweise? Quellcode? Du hast lcd_zeichen vergessen. Wird aber alles nicht ändern. Wenn ich den Code beim überfliegen richtig verstanden habe erscheinen erst dann zahlen auf dem display wenn die Messung erfolgreich war (genauer gesagt nach der 2). Da aber D: und T: bei dir angezeit wird vermute ich mal das entweder - Kein Brauchbares signal ankommt oder - Die Ansteuerung des Timers beim M8 nicht komatibel zum m88 ist > An der Schaltung hängt ein Lüfter- das Schwarze Tachokabel Ich würd eher sagen Gelb....
Wenn "D: " und "T: " angezeigt werden, funktioniert die LCD-Ansteuerung. Wenn ein Signal anliegt, muß die LED bei jeder fertigen Messung 0,1s aufleuchten. Falls das nicht passiert, ist das Signal nicht erkannt worden. Kontrolliere bitte, ob die T1-Interrupts überhaupt arbeiten. Zunächst muß der OVF-Interrupt funktionieren: LED in der Routine blinken lassen. Als Nächstes die LED in der CAPT-Routine blinken lassen. Wenn beide Interrupts funktionieren, müßte auch die Anzeige der Messwerte klappen. Noch etwas: ist SEI() wirksam, oder ist irgendwo ein CLI() vorhanden, was alle Interrupts wieder sperrt? Jan schrieb: > An der Schaltung hängt ein Lüfter- das Schwarze Tachokabel an PD6 ( > (AIN0) Kontrolliere mit einer LED, ob hier überhaupt Impulse vorhanden sind.
m.n. schrieb: > Vielleicht ist es niemandem aufgefallen und es wird äußerst selten zu > 'unsauberer' Auswertung führen, aber nachfolgender Programmabschnitt > sollte vor einem T1OV-Interrupt geschützt werden. 'mess_dauer' kann > sonst falsch gelesen oder gelöscht werden. > Die Sperre für TOIE1 habe ich hier ergänzt: > > TIMSK1 &= ~(1<<TOIE1); // t1OV interrupt sperren > if(mess_status==MESSEN && mess_dauer >= MESSZEIT) { > mess_status=AUSLESEN; // Auswertung starten > mess_dauer = 0; // wieder Messzeit abwarten > } > TIMSK1 |= (1<<TOIE1); // t1OV interrupt freigeben Wenn ich das richtig verstanden habe muss es dann so wie angehängt aussehen. Gruß Andreas
Oh, ich sag mal nur, dass ich suchen mußte, um Deine Änderung zu finden. Damit niemand die schlechte Kopie verwendet, hänge ich die letzte Version am besten an.
Angehängte Dateien:
-

dreh1.jpg
120 KB
Hallo Leute, da ich mal auf die Schnelle einen Drehzahlmesser brauchte, habe ich mal fix ein 1-seitiges Layout gemacht. Nix schönes und ohne ISP. Das LCD passt direkt oben drauf. Vielleicht kann es ja jemand brauchen. Die Beleuchtung des LCD ist nicht vorgesehen, da ich es für Batteriebetrieb vorgesehen hatte. Gruß Stephan
Wozu ? Das HEX file gibts doch auf der Site zum Download. Mino Elektronik.
kann man die hex file in bascom zurückwandeln? hätte da einige änderungen. :)
Tommy Tomatronic schrieb: > kann man die hex file in bascom zurückwandeln? Und wie soll das gehen? Das scheitert schon alleine an den Variablennamen.
Tommy Tomatronic schrieb: > kann man die hex file in bascom zurückwandeln? > > hätte da einige änderungen. :) Sieh es als Zeichen, dass es an der Zeit ist, eine vernünftige Programmiersprache zu lernen.
Eine neue Programmversion mit automatischen Abgleich auf ein 1Hz-Referenzsignal - am besten von einem GPS-Empfänger - ist fertig. Damit kann man den oben gezeigten Aufbau von Stephan Henning recht einfach abgleichen. Eine kurze Beschreibung dazu sowie .c-Quellcode und .hex-Datei sind hier zu finden. http://www.mino-elektronik.de/fmeter/fm_software.htm#bsp3
des woas i doch eh dass des net geht! :) da hatta wieda was losgetreten! :)
m.n. schrieb: > Eine neue Programmversion mit automatischen Abgleich auf ein > 1Hz-Referenzsignal - am besten von einem GPS-Empfänger - ist fertig. > > Damit kann man den oben gezeigten Aufbau von Stephan Henning recht > einfach abgleichen. Eine kurze Beschreibung dazu sowie .c-Quellcode und > .hex-Datei sind hier zu finden. > http://www.mino-elektronik.de/fmeter/fm_software.htm#bsp3 theoretisch schon. Praktisch schwierig. Ich habe die Eingangsbeschaltung nicht veröffentlicht. Als Eingang habe ich die vom Sprut veröffentlichte genommen. Fototranse mit OPV (Modellbaudrehzahlmesser) Nein die ist nicht auf dem Bild zu sehen. das war was anderes, was ich da vorn dran hatte. Gruß Stephan funktioniert übrigens gut. Nur die Anzeige ist mir etwas zu hektisch und macht zu größe Sprünge, was sich aber auf Grund des Prinzips nicht viel ändern lassen wird. Möglich wäre eine gleitende Mittelwertbildung zB. Wert neu = Wert alt *3 / Wert neu. Was allerdings unweigerlich zu einer deutlich trägeren Anzeige führen würde, wenn sich Wert alt und wert neu langsam annähern. Es ist eben nichts perfekt. So wie wir Menschen. :-)
Stephan Henning schrieb: > m.n. schrieb: >> Eine neue Programmversion mit automatischen Abgleich auf ein >> 1Hz-Referenzsignal - am besten von einem GPS-Empfänger - ist fertig. >> >> Damit kann man den oben gezeigten Aufbau von Stephan Henning recht >> einfach abgleichen. Eine kurze Beschreibung dazu sowie .c-Quellcode und >> .hex-Datei sind hier zu finden. >> http://www.mino-elektronik.de/fmeter/fm_software.htm#bsp3 > > theoretisch schon. Praktisch schwierig. Ich weiß jetzt nicht, worauf sich das "schwierig" bezieht. Den 'Fangbereich' für den auto. Abgleich habe ich von +/-100ppm auf +/-1000ppm erweitert, obwohl die nun mögliche Toleranz für mich schon grenzwertig ist. Unter Umständen sollte C3 bei einem GPS-Signal unbestückt sein oder R4 verkleinert werden, falls der 1pps-Impuls nur 1µs lang ist.
Stephan Henning schrieb: > theoretisch schon. Praktisch schwierig. m.n. schrieb: > Ich weiß jetzt nicht, worauf sich das "schwierig" bezieht. Hallo Michael, das bezog sich lediglich auf die Eingansbeschaltung welche ich nicht dargestellt hatte. Das optische Eingansteil vom Sprut. Welche für den Abgleichzweck aber völlig uninteresant ist. Sorry, hatte einen Knoten im Hirn. Außerdem sind ja in der BRD Datei keine Werte enthalten. Es ging ja bei dem Post lediglich um die mögliche Nutzung des Layouts, da ich es ja eh machen musste. Bleib ganz ruhig, alles gut. Gruß Stephan
Stephan Henning schrieb: > Bleib ganz ruhig, alles gut. Na ja, dass die Istfrequenz von Quarzen in manchen Fällen zu stark streut, ist mir schon zu Ohren gekommen. Deshalb wollte ich ein bißchen mehr Nachbausicherheit einbringen. Ferner ist mir bei der Anpassung eines Frequenzzähler-Programms auf einen Arduino UNO R3, eine Abweicheng des 16MHz Quarzes von >500ppm aufgefallen. Das ist schon heftig und wohl die Folge von "Geiz ist ...".
Michael, ich denke Du machst Dir zu viele unnötige Sorgen. Wenn es hier deutliche Probleme geben würde, hättest Du schon was davon gelesen, bzw. über Deine eigene Homepage ein Feedback bekommen. Dein(e) Schaltung /Programm erhebt ja auch nicht den Status eines Präzisionsmessers. Das wird erst interessant wenn sich der Peter Danneger melet. Also bleib entspannt. Ein Arduino UNO R3 kann ja wohl nicht das Maß der Dinge sein. Ist das Ding überhaupt Echtzeifähig ? Kann doch bei USB Interface eigentlich nicht sein, denke ich. Ich habe keines. Gruß Stephan
Hallo alle Ich habe die Drehzahl-Schaltung gebaut (mit externem 20MHz Quarz). Ich verwende am Eingang einen wie im thread besprochenen Hallsensor Typ TLE4905. Der Prozessor erkennt die Impulse (Led), die ich mit einem Magneten am Sensor gebe. Jedoch scheint die angezeigte Frequenz und damit auch die Zeit nicht zu stimmen. Es zeigt mit eine deutlich zu hohe Drehzahl an, wenn ich z.B. im Sekundentakt den Hallsensor ansteuere. Ich vermute, dass meine Prozessor-Clock nicht stimmt. Ich habe den Atmega88 mit folgenden Fuses programmiert: Ext. Full-swing Crystal; Start-up time PWRDWN/RESET: 258 CK/14 CK + 65ms; (CKSEL0110 SUT=01) Brown-out detection level at VCC=4.3V ergibt: Low: 0x56; High: 0xDC; Extended: 0xF9
Laurin E. schrieb: > Es zeigt mit eine deutlich zu hohe Drehzahl an, wenn ich z.B. > im Sekundentakt den Hallsensor ansteuere. Welcher Wert wird angezeigt und ist er stabil?
Hallo m.n. Ich Idiot hatte vergessen die "divide clock by 8 internally* zu unchecken. Jetzt schein die Frequenz zu stimmen. Sorry!
Das hatte ich schon vermutet. Mit der letzten Version wäre das Problem nicht entstanden. m.n. schrieb: > Eine neue Programmversion mit automatischen Abgleich auf ein > 1Hz-Referenzsignal - am besten von einem GPS-Empfänger - ist fertig. > > Damit kann man den oben gezeigten Aufbau von Stephan Henning recht > einfach abgleichen. Eine kurze Beschreibung dazu sowie .c-Quellcode und > .hex-Datei sind hier zu finden. > http://www.mino-elektronik.de/fmeter/fm_software.htm#bsp3 In der 1. Zeile von main() steht dort: CLKPR = 0x80; CLKPR = 0x0; Damit wird der interne Vorteiler immer auf 1 gestellt.
Bitte melde dich an um einen Beitrag zu schreiben. Anmeldung ist kostenlos und dauert nur eine Minute.
Bestehender Account
Schon ein Account bei Google/GoogleMail? Keine Anmeldung erforderlich!
Mit Google-Account einloggen
Mit Google-Account einloggen
Noch kein Account? Hier anmelden.