Hallo,
ich brüte gerade über einen multiphasen Boost Converter der von 6-7V auf
24V umsetzt. Es sollen 2-4 Phasen werden. Die Erzeugung der
Ansteuersignale macht erst mal ein LPC1769 (neben anderen Sachen). Die
Frage die sich mir stellt: Ist es nötig, die Ströme in den einzelnen
Phasen zu messen und auf Gleichheit auszuregeln oder ergibt sich das von
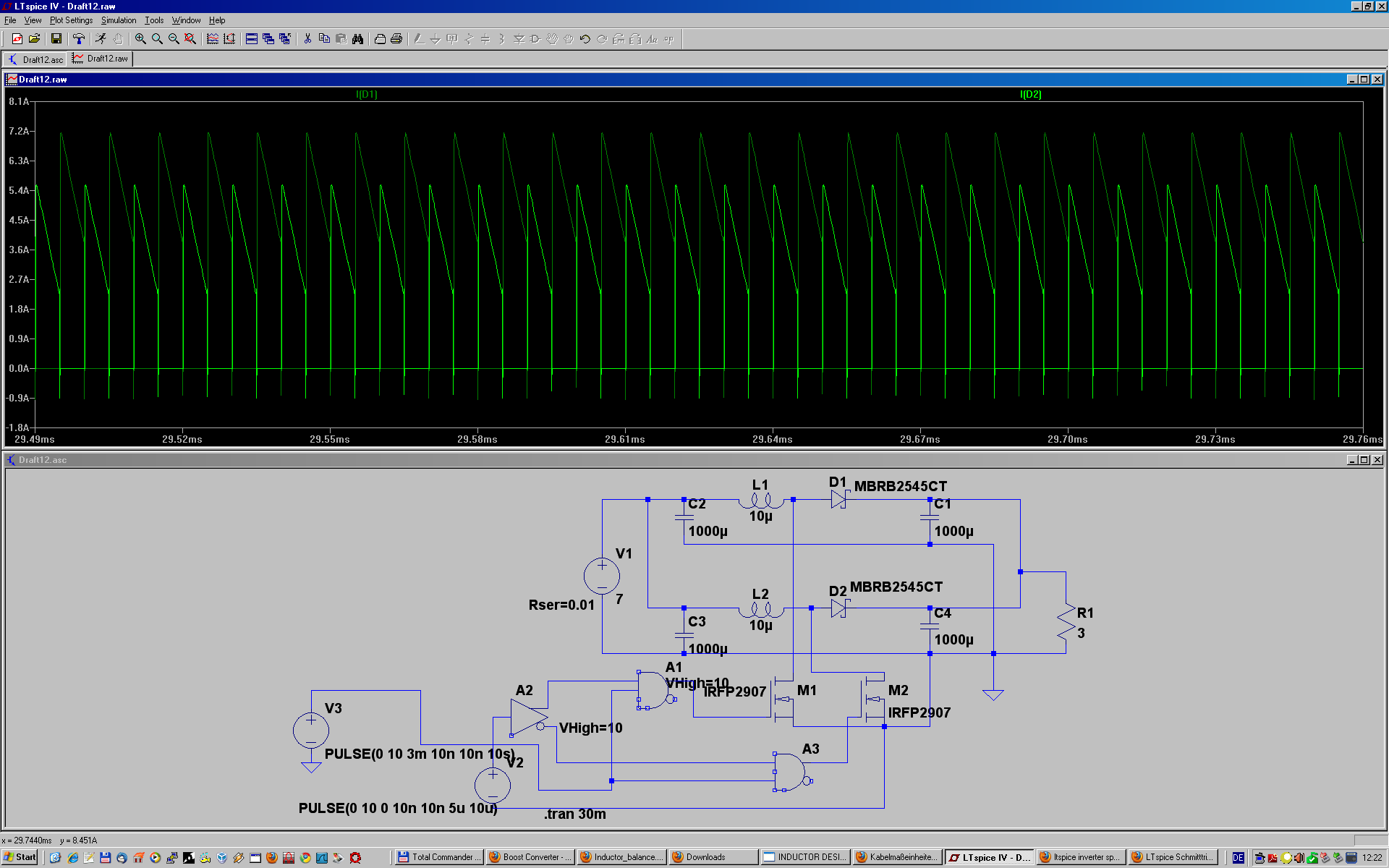
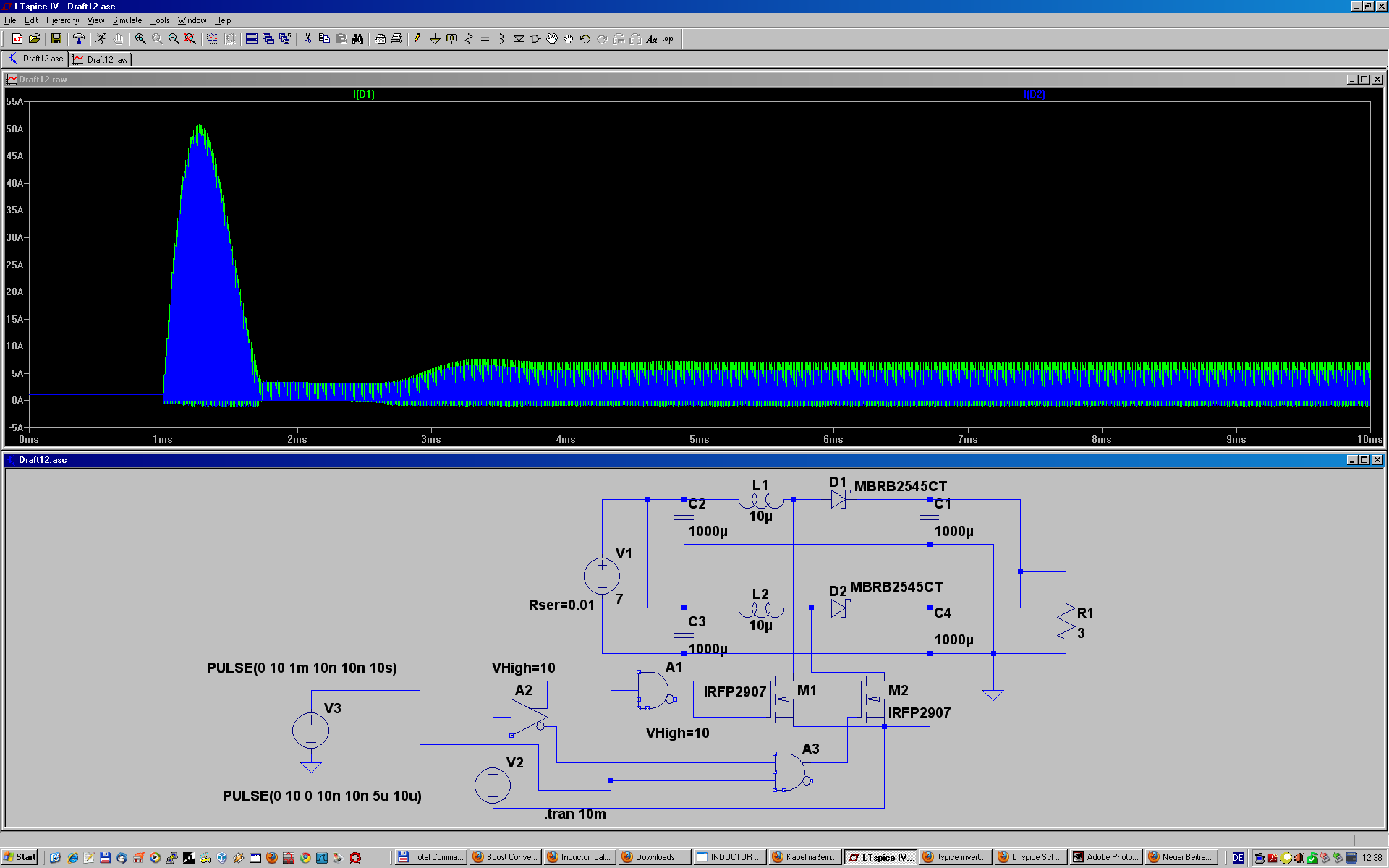
selbst. (im Idealzustand mit gleichen Bauteilen). Ich habe das mal mit 2
Phasen und einem fixen gegenphasigen 50:50 Tastverhältnis in LTSpice
simuliert. Leider schwingt sich das aber anders ein als erwartet. Ich
hänge mal Bilder aus LTSpice dran. Dargestellt sind die Ströme durch die
beiden Dioden, die sich sehr deutlich unterscheiden.
Ich brauche am Ende keine geregelte Spannung, die Einstellung eines
Tastverhältnisses reicht aus. Allerdings sollten die Verteilung auf die
einzelnen Phasen schon in etwa gleich sein. Dass ich realen Betrieb
Rampen zum Anfahren brauch ist klar, das ist hier bei der Simulation nur
zur Vereinfachung nicht drin.
Schönen Sonntag an alle.
Bei Multiphasenwandlern in Voltage-Mode Regelung wird eine extra
Regelkreis zum aufteilen der Spröme benötig. m einfachsten Fall
Subtrahieren und diesen Wert dem Spannungsreglerausganz hinzuaddieren
bzw abziehen. Oder die Ströme der Phasen mittel und den Mittelwert mit
den Phasenströmen vergleichen. Die ICs für Multiphasen Topologien haben
Mechanismen in dieser Art. Bei Peak-Current Mode Regelung ist dies nicht
unbedingt erforderlich.
Oft wird die Stromaufteilung bei maximaler Last dann besser, hilft aber
nicht viel wenn im Teillastbereich der Ripple am Ausgang stark
durchkommt.
Wenn du den Wandler ohnehin digital regelst ist es ja noch einfacher,
denn den Strom wirst du ohnehin Messen.
Wenn die Resouren am µC knapp sind, kann man den Balancing Regler auch
in einem anderen Interrupt Level als den Hauptregler fahren und weniger
oft updaten.
@Fralla
Danke erst mal für deine kompetente Ausführung.
Beim Googeln kam mir noch folgendes unter die Tasten:
http://oa.upm.es/3353/1/INVE_MEM_2008_54677.pdf
Da wurden meine Versuche bestätigt, nachdem bereits Unterschiede von
0.5% bei den Tastverhältnissen dramatische Unterschiede in den
Phasenströmen produzieren können.
Gewundert habe ich mich aber dann beim Referenzdesign von Microchip:
http://www.microchip.com/stellent/idcplg?IdcService=SS_GET_PAGE&nodeId=1406&dDocName=en539797&redirects=acdc
Da wird zwar ein Komperator für jede Phase verwendet um auf eine
Überlast zu reagieren, aber mehr auch nicht bei einem 4 Phasen
Buck-Konverter.
Ich habe dann schnell noch mal eine Simulation mit einem 2 Phasen Buck
gemacht um zu testen ob das da überhaupt auch so kritisch ist. Ist es.
Auf alle Fälle ist mir dabei klar geworden, dass ich die Strommessung
pro Phase wohl brauche. Oder wie im ersten Link den Ripple bewusst so
groß machen, dass sich das von selbst erledigt. Der würde mich nicht mal
stören. Trotzdem weiss ich jetzt, dass die Strommessung mit rein kommt.
Fralla, noch mal eine andere Frage. Ich habe schon viele deiner Beiträge
gelesen und weiss, dass das was du sagst Hand und Fuss hat. Würdest du
bei den Leistungen die ich anstrebe (300-500W) auf einen
Multiphasen-Boost setzen oder auf eine ganz andere Topologie? Die Ströme
sind ja schon ganz ordenlich und die Dioden werden wohl auch durch Fets
ersetzt werden müssen. Ja, ich weiss, das sind im Verhältniss zu den
hier teilweise besprochenen xxKW-Wandlern noch "Signalleistungen"...
Hallo Jürgen,
>Multiphasen-Boost setzen oder auf eine ganz andere Topologie? Die Ströme>sind ja schon ganz ordenlich und die Dioden werden wohl auch durch Fets>ersetzt werden müssen.
Boost Topologie passt schon. Durch die Drossel an der Eingangsseite
(Hochstromseite) ist der Strom durch kontinuierlich und reduziert den
Filteraufwand enorm. Das interleaving reduizeirt natürlich dann noch
mehr.
Bei dem Strom würde ich mit Sicherheit Synchringleichrichter einsetzten.
Es gibt schließlich gute Treiber dafür, die möglichen Probleme sind
geringer als die Thermischen bei Einsatz von Dioden.
Aufgrund des Dutycycle wäre eine Phasenanzahl von 4 ideal, da gibts dann
fast eine Auslöschung des Ripple. Da sich die Leistung mit 500W in
Grenzen hält kann man auch 2 Phasen nehmen (oder 3?). Musst du eben
abiegen wieviel Steueraufwand erträglich ist.
>Trotzdem weiss ich jetzt, dass die Strommessung mit rein kommt.
Das ist Sinnvoll. So steht dir auch die Möglichkeit auf Konstantstrom
bei Überlast zu regeln offen.
Nur aus interesse, wo kommen die 6V-7V eigentlich her?
Und wenn du die Drosseln nicht selbst bauen willst, die hier passen für
den Wandler http://www.coilcraft.com/ser2900.cfm
MFG Fralla
Hallo Fralla,
danke erst mal für deine Ausführungen und den Tip mit den Drosseln. Die
kannte ich noch nicht.
Zu deiner Frage wo die 6-7V herkommen. Das sind 2 LiFePo4 Akkus
(40-70Ah) in Reihe und sollen einen BLDC am Fahrrad antreiben. Ich will
mal versuchen ob der umgedrehte Weg auch realisierbar ist. Als MC kommt
erst mal ein LPC1769 zum Einsatz, der auch die Motorsteuerung mit
übernehmen soll. Auf eine PWM in der Motorbrücke soll verzichtet werden.
Ein effektives aktives Balancing der 2 Zellen ist auch ziemlich einfach
möglich.
Mit dem LPC17xx bin ich auf 3 Phasen für den Boost-Konverter beschränkt.
In meiner Simulation bei 100khz musste ich die Tastverhältnisse im 10ns
Raster ändern um die 2 Phasen auszugleichen, was mich schon etwas
stutzig macht. Das ist beim LPC1769 mit 120Mhz gerade noch drin.
Die dsPics mit SMPS PWM habe ich mir auch angesehen. Leider liest man da
auch viel schlechtes, insbesondere was errata und Stromverbrauch angeht.
Sonst sind die aber recht interessant. Vorallem auch die 28-pin DIL
Varianten zum Basteln. Da muss mann sich zwar wieder noch eine neue
Entwicklungsumgebung zulegen, ausschießen würde ich das aber nicht. Kann
man ja auch auf 2 Controller aufteilen. Eigentlich dachte ich aber mit
Cortex M0/M3 in der 32-Bit Welt angekommen zu sein....
Als IC für den Synchrongleichrichter kenne ich ZXGD3105N8, TEA179x,
IR1168, habe aber noch nichts davon in den Händen gehabt. Was nimmt man
da am besten?
Schönen Abend noch
Jürgen
>Leider liest man da auch viel schlechtes, insbesondere was errata und >Stromverbrauch angeht.
Ich verwende sehr oft dsPICs. Ja im Errata steht da einiges, das sollte
man nicht außer acht lassen. Aber wenn man es wirklich liest, kommt man
damit zurecht.
>bei 100khz musste ich die Tastverhältnisse im 10ns>Raster ändern um die 2 Phasen auszugleichen, was mich schon etwas>stutzig macht. Das ist beim LPC1769 mit 120Mhz gerade noch drin.
Hat der keine PLL für das PWM Modul? EIn einfacher dsPIC33 kann 1,04ns
Auflösen bei nur 40Mhz. Ich sehe so einen billgen dsPIC besser für deine
AUfgabe geeignet. 32-Bit helfen da nicht wirklich mehr, klar die 120Mhz
schon. Aber die StromRegelung der 3-Phasen macht ein dsPIC auch mit
"links".
>Das sind 2 LiFePo4 Akkus (40-70Ah) in Reihe und sollen einen BLDC am >Fahrrad
antreiben.
Hm wieso ist die Zellenanzahl so gering? So ein Boost-Wandler ist auch
bei dem hohen Strom machbar, mit heutigen Bauteilen auch sehr
effizient, nur arte es dann in einer Materialschlacht aus...
>Auf eine PWM in der Motorbrücke soll verzichtet werden.
Wieso das? Erfolgt die Strombegrenzung der Anfahren dann über den
Boost-Wandler?
>Was nimmt man da am besten?
Grundsätzlich kannst du es mit jedem High-Low-Side Treiber machen und
für die Deatime und DCM erkennung selbst sorgen. Es gibt auch dezitierte
Treiber für diese Anwendung wie:
http://www.ti.com/lit/ds/symlink/tps28226.pdf
Oder ICs welche die Spannung und Strom am Fet messen und selbst
ausschalten
wiehttp://www.onsemi.com/PowerSolutions/product.do?id=NCP4303 (Wobei ich
dem in einem CCM Booster nicht trauen würde) Das TI Teil ist gut.
MFG Fralla
Fralla schrieb:>>bei 100khz musste ich die Tastverhältnisse im 10ns>>Raster ändern um die 2 Phasen auszugleichen, was mich schon etwas>>stutzig macht. Das ist beim LPC1769 mit 120Mhz gerade noch drin.>Hat der keine PLL für das PWM Modul? EIn einfacher dsPIC33 kann 1,04ns>Auflösen bei nur 40Mhz. Ich sehe so einen billgen dsPIC besser für deine>AUfgabe geeignet. 32-Bit helfen da nicht wirklich mehr, klar die 120Mhz>schon. Aber die StromRegelung der 3-Phasen macht ein dsPIC auch mit>"links".
Ja, dass die dsPics da gut geeignet sind habe ich schon mitbekommen.
Scheint auch ein ziemliches Alleinstelllungsmerkmal von denen zu sein.
Ich wüsste nicht welche MCs noch Counter haben die von der steigenden
und fallenden Flanke eines 480MHz PLL Ausgangs angetrieben werden. Da
kann man ihnen ja glatt den Stromverbrauch verzeihen...
Die Cortexe habe ich nur ins Spiel gebracht, weil ich da neben den AVR
und 8051 die meisten Erfahrungen habe. PICs habe ich bisher nie
verwendet. Aber man lernt ja nie aus.
>>Auf eine PWM in der Motorbrücke soll verzichtet werden.> Wieso das? Erfolgt die Strombegrenzung der Anfahren dann über den> Boost-Wandler?
Genau, die Reglung soll nur im Wandler erfolgen. Ausser bei Überlast und
abgeschaltetem Boost Wandler. Da kommen die ca. 6V ja noch durch.
Regelung ist übertrieben. Eigentlich ehr Steuerung. Es sollen am Ende
keine Gechwindigkeiten >20kmh unterstützt werden, und nach deutschen
Gesetzen gibts auch nur Unterstützung wenn sich das Rad schon dreht.
Hier in meiner Gegend sind die Hügel das Problem weswegen ich meine Frau
nicht aufs Rad kriege. 500 Höhenmeter auf 20km sind da keine Seltenheit.
Die Hauptbelastung wird sich deshalb (so meine Vermutung bis jetzt) im
Bereich um 8-12V Einpegeln wenn es um Unterstützung am Berg mit ca.
8-12kmh geht.
>>Das sind 2 LiFePo4 Akkus (40-70Ah) in Reihe und sollen einen BLDC am >>Fahrrad>antreiben.>Hm wieso ist die Zellenanzahl so gering? So ein Boost-Wandler ist auch>bei dem hohen Strom machbar, mit heutigen Bauteilen auch sehr>effizient, nur arte es dann in einer Materialschlacht aus...
Der andere Weg wären 8 Zellen in Reihe. Da ein aktives Balancing der
Zellen zu machen ist auch eine Materialschlacht. Ausser man nimmt den
üblichen Weg und heizt Widerstände auf. Das ganze spielt sich auf
experimenteller Basis ab und steht nicht unter dem Kostendruck eines
kommerziellen Herstellers.
Nimm die 8-Zellen-Variante.
Balancieren brauchst du zwei mal im Jahr. Lifepo4 laufen nicht
sonderlich auseinander.
>(so meine Vermutung bis jetzt) im Bereich um 8-12V Einpegeln
Wird deutlich mehr werden, denke ich mal ;))
>Da kann man ihnen ja glatt den Stromverbrauch verzeihen...
Ich muss sagen, mich hat der Stromverbrauch noch nie gestört, bzw war
kritisch, denn die 180mA auf 3V3 fallen kaum ins Gewicht. Was aber
auffällig ist, dass das bei abschaltung des PWM Moduls der
Stromverbrauch um mehr als 1/3 absinkt, kein Wunder.
>Scheint auch ein ziemliches Alleinstelllungsmerkmal von denen zu sein.
Auch die 16Bitter der C2000er Serie von TI sind ähnlich.
Was mich an den dsPICs stört, ist die gering Taktfrequenz von nur 40mHz.
Denn oft braucht man einfach nur Regelgeschwindigkeit, da helfen auch
32Bit nichts, oder kaum. Da muss dann was schnelleres zb ein TI C2000
28x-Serie, Frescale MC56F84xx/83xx welche man dann über 100Mhz Takten
kann.
Aber zu Glück wird auch Microchip mit höher getakteten dsPICs kommen,
denn für digitale Regelungen braucht man oft nicht mehr
Registerbreite/RAM/Flash etc.
>Der andere Weg wären 8 Zellen in Reihe. Da ein aktives Balancing der>Zellen zu machen ist auch eine Materialschlacht.
Da ist abzuwiegen was weniger Schlacht ist. Denn mit steigender
Zellenanzahl sinkt natürlich der Kufer und Siliziumeinsatz des Boosters.
Dafür mehrere Balancer (Die man ja eigentlich nur am Ladegerät braucht).
Ich meine, dass 2-Zellen für 500W jedoch absolut ungünstig sind was
Wandlerwirkunsggrad/Material betrifft. Denn selbst bis 60V bekommt man
Fets mit unter 3mOhm. Bei 30V wirds auch nicht weniger als 1mOhm, was
keinesfalls die Stromquadratischen Verluste ausgleicht...
MFG Fralla
>Da muss dann was schnelleres zb ein TI C2000>28x-Serie, Frescale MC56F84xx/83xx welche man dann über 100Mhz Takten>kann.
Das ist so abartig, wie bei den Samrtphones mit Ghz Multicores, wozu
braucht man im digitalen Wandler >100MHz?
>Aber zu Glück wird auch Microchip mit höher getakteten dsPICs kommen,>denn für digitale Regelungen braucht man oft nicht mehr>Registerbreite/RAM/Flash etc.
Wo kann man das Nachlesen?
Markus L. schrieb:> Das ist so abartig, wie bei den Samrtphones mit Ghz Multicores, wozu> braucht man im digitalen Wandler >100MHz?>
Das hatte ich ja geschrieben. Um in meiner Simulation eines
Multiphasen-Konverters mit 2 Phasen und 50:50 Tastverhältnis die Ströme
in den Phasen gleich zu kriegen, waren bei 100khz Taktfrequenz der PWM
10ns Unterschied in den On-Zeiten mehr als signifikant. Es machte einen
Unterschied von mehr als 10% aus, wenn die On-Zeit bei 5.00 oder 4.99us
lag. 10ns sind schon 100MHz und die Eingangsfrequenz der dsPic in die
PWM liegt bei 480MHz. Und dann zählt er auch noch bei steigender und
fallender Flanke, so dass die Counter mit knapp einem GHz klar kommen
müssen. 100khz bei einem Schaltregler sind heute ja nichts aufregendes
mehr. Ich hätte das auch nicht geglaubt, aber manchmal gibt es eben doch
einen echten Bedarf.
Aber, es geht hier nicht um die Taktfrequenz der CPU. Die kann um
Größenordnungen kleiner sein. Die mögliche Auflösung der PWM ist hier
das Entscheidende.
> Das ist so abartig, wie bei den Samrtphones mit Ghz Multicores, wozu> braucht man im digitalen Wandler >100MHz?
Das liegt daran, dass die Schaltfrequenzen steigen und die Wandler
komplexer werden. Du kanst dir ja ausrechnen welche High-Level
Updaterate bei 40Mhz und nur 400 Befehlen (ja auch wens MACs gibt)
maximal zu erreichen ist. Und natürlich muss auch CPU Zeit für
niedrigere Levels bleiben.... Und heutige Halbleiter erlauben ja auch
mehr als 200kHz auch im >1kW Bereich.
Wenn das GaN-Zeitalter mal voll da ist, werden die typischen SMPS/Motor
DSPs dsPIC, C2000, etc (was ja eigentlich nur mit paar DSP Befehlen
getunte µCs sind) auch in Takfrequenzen der großen "richtigen DSPs"
vorstoßen, wahrscheinlich wird das sowieso passieren.
>Aber, es geht hier nicht um die Taktfrequenz der CPU. Die kann um>Größenordnungen kleiner sein. Die mögliche Auflösung der PWM ist hier>das Entscheidende.
Oft ist aber auch die Taktfrequenz limitierend, eben wenn es um den
Reglerupdate geht.
Jeder dezidierte DSP für digitale Regelungen (und auch viele simple
8-Bit µCs) betreiben das PWM Modul ohnehin mit vervielfachter Frequenz.
>Es machte einen Unterschied von mehr als 10% aus, wenn die On-Zeit bei >5.00 oder
4.99us lag.
Das wird für statisch fixes Dutycycle stimmen. Doch diesen Fall hat man
im closed-loop geregelten Betrieb niemals. Da gibts immer ein
Dutcycle-Jitter da der Regler ja nie auf einem statischen Wert steht.
Somit kann auch mit gröberer PWM Auflösung ein im Mittel gleicher Strom
geregelt werden. Der Regler jittert dann eben zwischen zwei Werten.
Schließlich kann der Strom bei 10ns Dutycycle-Unterschied ja nie um 10%
in einem Takt springen. So empfindlich sind Interleavte-PWM Wandler im
praktischen Betrieb auch nicht.
Zumindest hab ich diese Erfahrung mehrphasig intereleavten PFCs und
anderen mehrpashigen Topologien gemacht.
MFG Fralla
Der Thread ist zwar schon etwas älter, aber ich denke das Thema paßt
sehr gut.
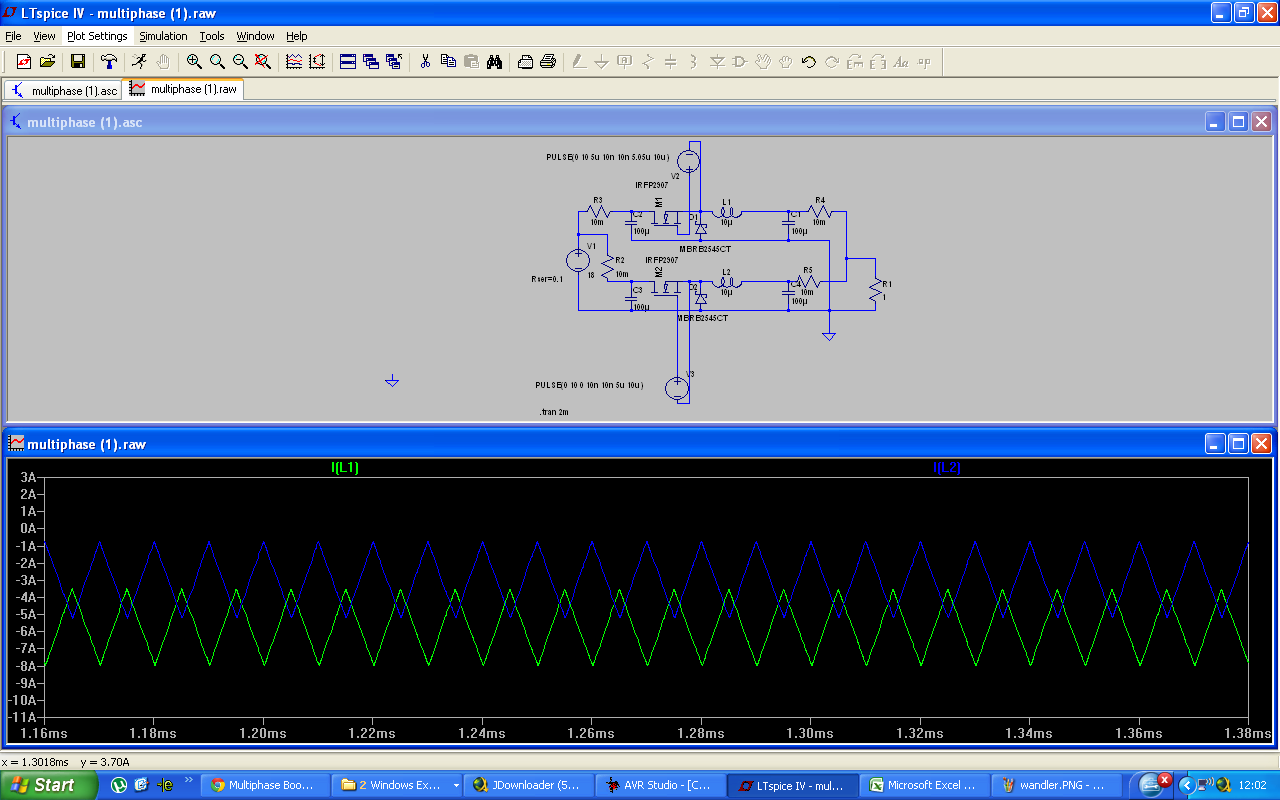
Ich bin gerade dabei einen multiphasen Buck-Converter zu entwerfen und
habe bei den Simulationen ganz andere Erfahrungen als Jürgen mit dem
Boost gemacht.
Im Anhang ist ein zweiphasen Buck zu sehen, bei dem die Spulen um 20%
variieren.
In der Simulation zeigt sich dann, daß die Spulenströme im Mittel nur um
2% variieren, nur der Ripple ist in der einen Spule größer.
Tritt dieser Effekt der "Selbstregulierung" auch bei synchronen Wandlern
auf oder nur bei denen mit Freilaufdiode.
Mach mal einen neuen Versuch. Spulen wieder gleich und einer der
Taktquellen leicht unsymentrisch (1%) z.B. PULSE(0 10 5u 10n 10n 5.05u
10u)
Das ist dann eine Abweichung von 50ns. Bei mir hat dann der eine
Drosselstrom einen Mittelwert von ca. 2A und der ander 6.5A. Mit 10ns
Unterschied ergeben sich bei mir immer noch ca. 1/3 Abweichung.
Das ist das was mich eigentlich stutzig gemacht hat. Da ist es egal ob
mit Dioden oder Fet solange es im kontinuierlichen Breich läuft und
nicht lückt.
Ich gehe davon aus, daß der Takt das einzig genaue an einem
Mehrphasenwandler ist. Die Toleranzen liegen eher in der Spule und den
Kondensatoren.
Der Unterschied der Spulenströme bei 1% Unterschied im Duty ist aber
wirklich krass.
Sorry, aber die Files sind so nicht brauchbar. PNG Bitte. Macht auch
nichts. Buck wandler sind sehr viel gutmuetiger. Ich hab einige 4 phasen
wandler gebaut. Mit einem Mega mit 16 MHz. Der 8 bit Zaehler gibt dann
schoene 64kHz
Dein Bild sieht etwas anders aus als meins, aber du hast jetzt auch noch
ein paar 10m Widerstände reingebaut. Das verändert das auch schon
wieder. Ob 1% Unterschied jetzt viel ist oder nicht will ich nicht
beurteilen. Gatewiderstände sind ja auch drin und bestimmt nicht besser
als 1%. In wieweit die realen Bauelemente da eine Rolle spielen weiss
ich auch nicht. Ich habe es aber praktisch auch noch nicht umgesetzt.
Intressant ist trotzdem, inwieweit kleine Unterschiede große
Auswirkungen haben und darum geht es ja nur. Änderungen im 10ns Bereich
haben fast 2stellige Prozentänderungen in den Strömen. Für 10ns muss die
PWM schon mit 100Mhz Grundtakt laufen.
Noch ein Beispiel:
Wieder alles gleich aber der eine Fet 10 Ohm und der ander 9 Ohm
Gatewiderstand. Das Ergebnis hänge ich dran. Das ganze kann man messen
und dann fest einprogrammieren. Ob das dann Langzeitstabil ist muss sich
zeigen. Allerdings muss die PWM da schon die entsprechen kleine
Auflösung haben.
Meines Erachtens sind die Spulen mit 10u viel zu mickrig. Der
Stromripplel ist mit 4A auch viel zu hoch. Unter 100u mach ich gar
nichts. Lieber 220uH. Ich moecht den Stromrippel unter 1A haben. Zudem
bevorzuge ich ungelueckten Betrieb wenn's um viel Strom gehen soll.
Die 10mOhm habe ich eingebaut, da sie auf dem PCB auch vorhanden sind
und wie ich hoffe, die Ströme symmetrieren.
Die Frequenz des Grundtaktes spielt keine Rolle, da ich beide Wandler
immer mit dem gleichen Duty ansteuern würde.
oh schrieb:> Ich hab einige 4 phasen> wandler gebaut. Mit einem Mega mit 16 MHz. Der 8 bit Zaehler gibt dann> schoene 64kHz
Hast Du mal die Lastverteileung auf den 4 Phasen gemessen oder die
Temperatur der einzelnen Teilwandler.
Alternativer schrieb:> Die Frequenz des Grundtaktes spielt keine Rolle, da ich beide Wandler> immer mit dem gleichen Duty ansteuern würde.
Wenn du den Effekten der ungleichmäßigen Stromverteilung mit
Programmcode gegensteuern willst, muss die Auflösung der PWM diese
Feinheiten aber auch noch hergeben.
Es gibt für diese Aufgabe auch spezielle Chips die alle eine Logic drin
haben um die Ströme aufzuteilen. Sicher nicht weil es nicht nötig ist.
Das Beispiel mit den 9 oder 10 Ohm Gatewiderstand zeigt aber, dass es
von vielen Faktoren abhängig ist. Und darauf verlassen dass die
Gatekapazitäten der Fets um nicht mehr als 10% streuen, würde ich nicht.
Deshalb denke ich muss man die Geschichte wenigsten einmal mit der
Software abgleichen wenn nicht besser die Ströme ständig messen und
gegensteuern. Mit einer hochauflösenden PWM.
Weiter oben ist ein Link, in dem es um selfbalancing buck-converter
geht.
Die Legen die Induktivitäten so aus, dass der Wandler gerade nicht
lückt.
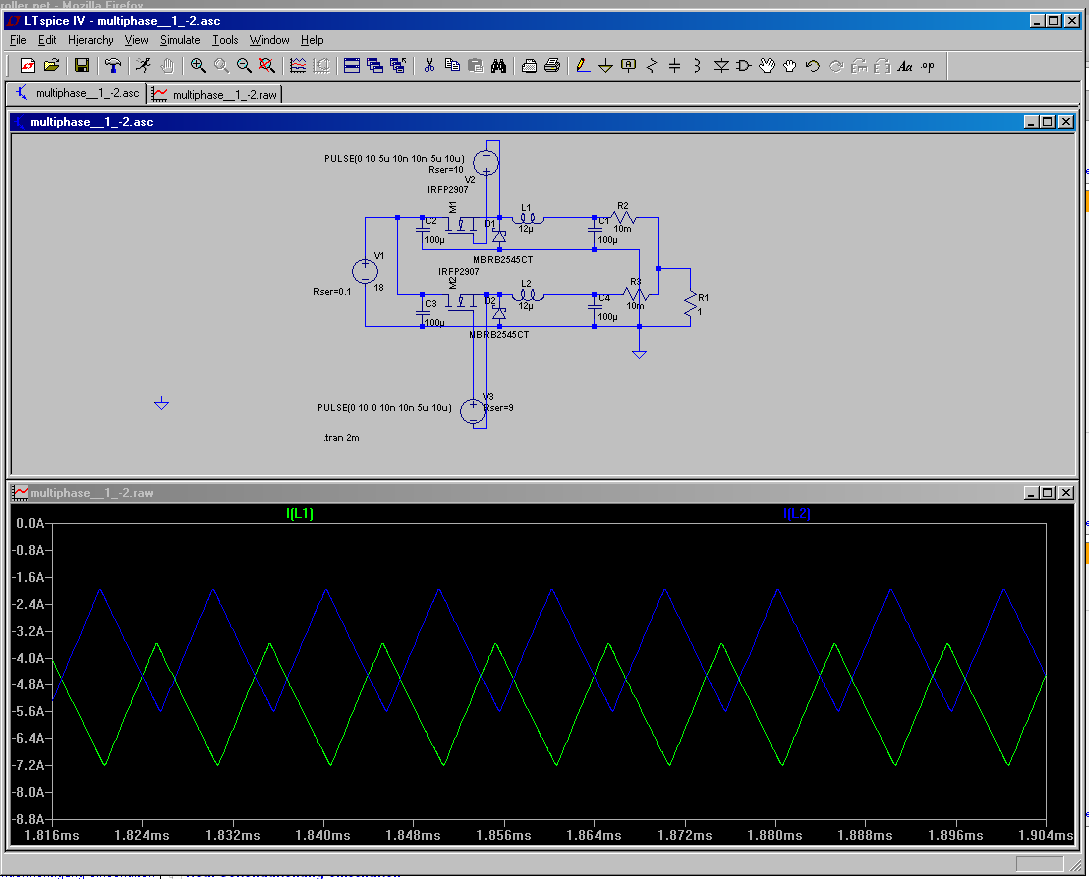
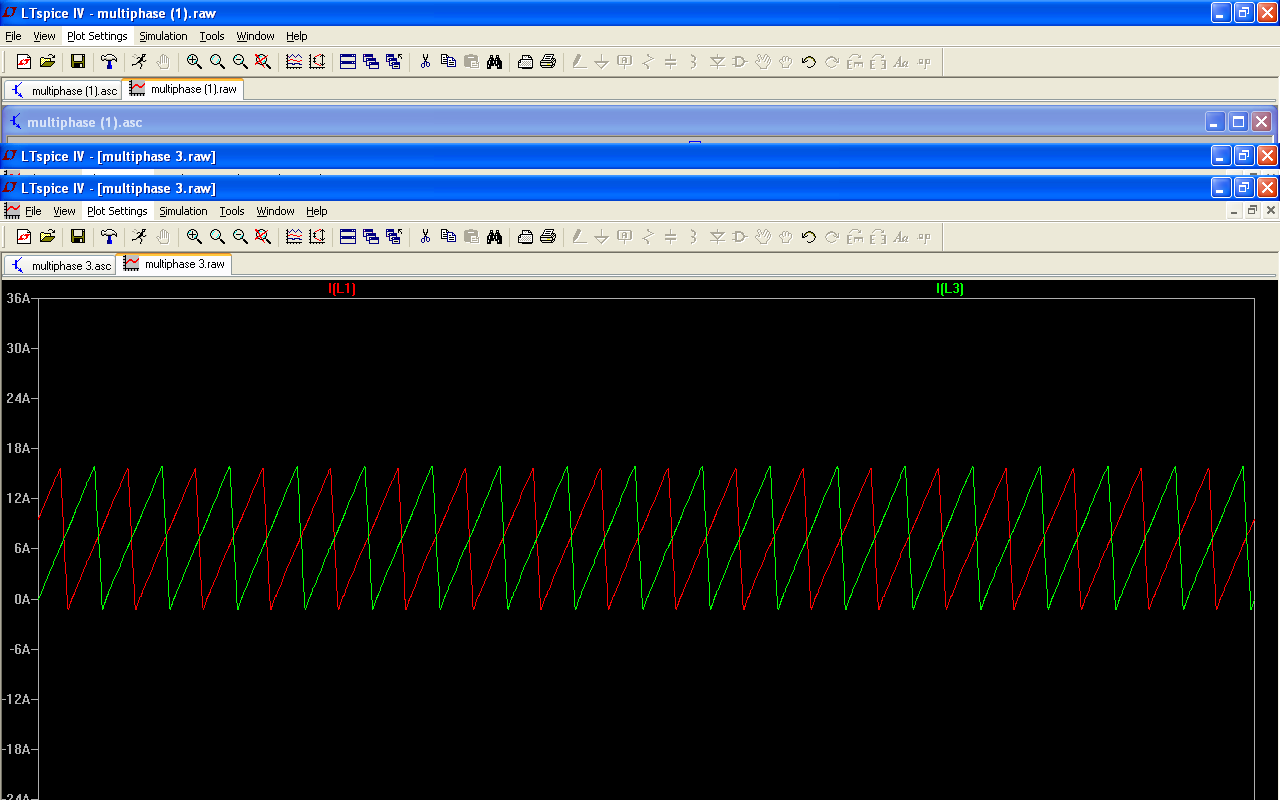
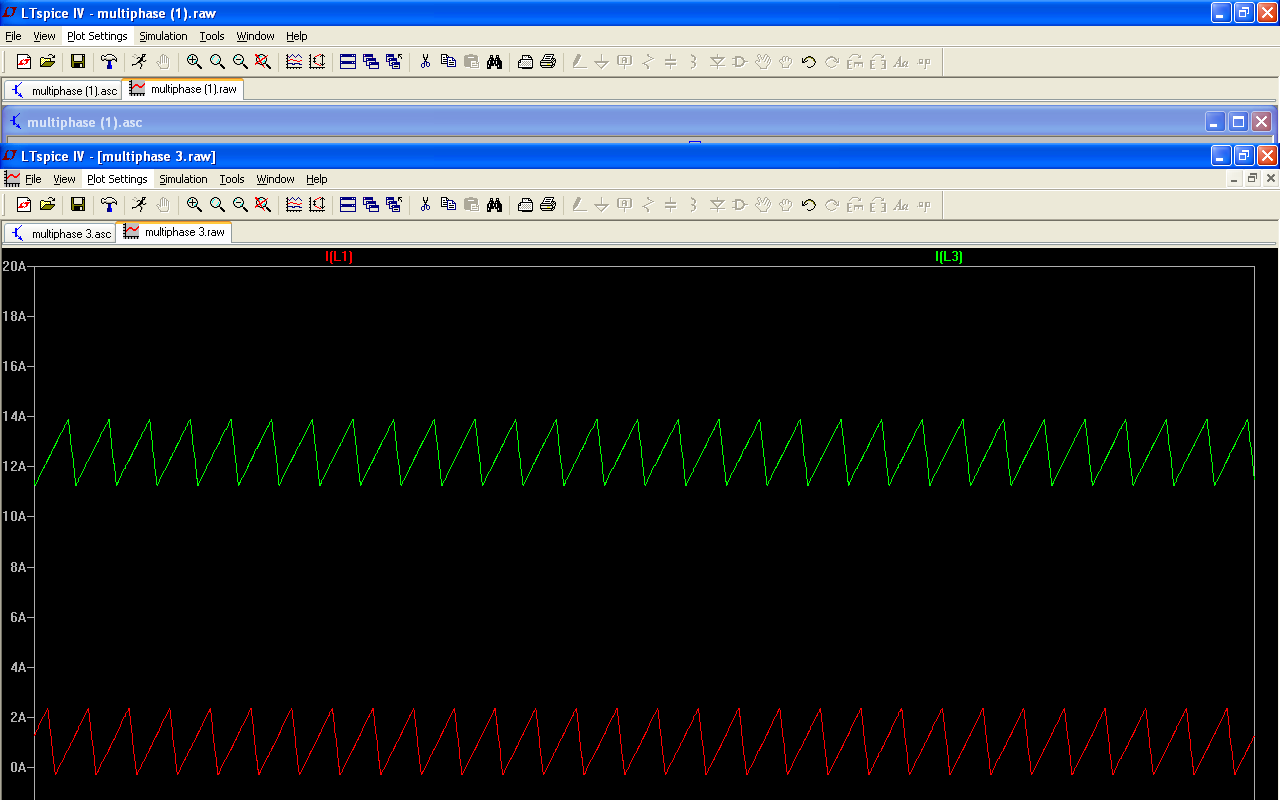
Die Anhänge sind von einem Zweiphasenwandler, bei dem die eine Phase
einen um 1% längeren Duty hat.
Bei zwei 10u Spulen sieht man einen deutlichen Unterschied im
Spulenstrom: 1A zu 13A.
Bei zwei 1u Spulen sind die Ströme fast identisch.
Nachteil, der Stromrippel ist relativ hoch.
 multiphase.png
(61 KB)
multiphase.png
(61 KB)
 multiphase2.png
(62 KB)
multiphase2.png
(62 KB)