Diese "Über-PWM" ist im Fadecandy implementiert:
https://www.adafruit.com/product/1689
Die Updates hängen natürlich am recht langsamen PWM-Timing, daher wird
es dort zu verzögerungen kommen. Um sich das Verhalten der LED-Treiber
genauer anzuschauen, könnte man sich über ein Oszilloskop den
Eingangsstrom anschauen. Ist einfacher als die visuelle Beurteilung.
Das stimmt leider auch nicht ;) Jede Flanke die über >650ns glaube ich
liegt wird als 1 erkannt. Reset bei >9ns bis 50ns wenn keine Daten
kommen.
Der Reset bewirkt im Treiber das dieser die nächsten Daten die kommen
übernimmt. Nach 24bit rastet der Treiber ein und gibt die weiteren Daten
am Out aus. Das spiel setzt sich unendlich fort, die Länge spielt keine
Rolle. Natürlich nur für die Framerate, je länger die Kette um so
geringer die Framerate.
Der IN wird vom Treiber gesampelt und ob eine 1 oder 0 erkannt wird ist
nur davon abhängig wie oft der Treiber pro Sample am IN den gleichen
Pegel einließt.
z.Bsp 3 sampels ist der Pegel 1 -> 0, 5 Samples Pegel 1-> 1.
Der Treiber generiert am OUT ein Signal was unabhängig ist vom IN, also
von dessen Timing.
Es gab eine Seite die dies genau beschreibt! Ich finde diese leider
nicht mehr auf Anhieb.
c-hater schrieb:> Wer Lust hat, kann ja mitknobeln, am Wochenende werde ich mal meine> bisherigen Ergebnisse aufbereiten und hier posten. Ich werde dafür dann> einen neuen Thread namens "The secret of WS2812B" eröffnen.
Es wäre ja nur logisch, dass jeder Pixel seine Daten mit einer kleinen
Verzögerung weitergibt - vorne wird gesampelt, hinten wird rausgegeben.
Aber OUT hängt ja nicht direkt am IN, sondern braucht ein paar
Taktzyklen, das Signal hinten wieder anzulegen.
Also hat zeitlich gesehen jede weitere LED einen anderen Offset zum
Latch und übernimmt die Farbe mit etwas Verzögerung.
Wenn also gelatcht wird müsste es wie ein Lauflicht mit ein paar
Nanosekunden von vorne nach hinten durchlaufen.
Und wenn man eine passende Frequenz der Ansteuerung drüberlegt hat man
eine schöne Interferenz.
Genau ! Deswegen sollte man eine Schlange beim verlegen vermeiden wenn
man Videos ausgeben will.
Jede Zeile muss dann auf einen extra Ausgang die synchron gestartet
werden.
Conny G. schrieb:> Es wäre ja nur logisch, dass jeder Pixel seine Daten mit einer kleinen> Verzögerung weitergibt
Ja klar. Das ist aber nicht das Problem, wie meine Versuche
eindrucksvoll zeigen. Das Problem ist vielmehr, dass bei hoher Framerate
(und die braucht man, wenn man die PWM erweitern will) die LEDs längst
nicht mehr bei jedem Latchimpuls die empfangenen Daten in ihre
PWM-Schaltung übernehmen, sondern sie lassen dabei immer mal wieder
Frames aus.
Wohlgemerkt: die Daten vom Bus übernehmen sie durchaus in jedem Frame,
aber man muss eine sehr überlange Latchphase (eine überlange Phase
Dauer-High tut es übrigens genauso) ausgeben, um sie dazu zu zwingen,
die vom Bus geholten Daten auch in ihre PWM-Ausgabe zu übernehmen.
Würden sie das nicht tun, wäre ja auch die Burstansteuerung garnicht in
der Form möglich, wie sie üblicherweise praktiziert wird...
Blöderweise ist die Erzeugung der überlangen Latchphasen nun zwar
programmiertechnisch überhaupt kein Problem (genau das machen ja
letztlich die "Burst-ler"), aber leider für das Ziel einer erweiterten
PWM wegen der dadurch verursachten massiven Reduktion der Framerate
völlig unbrauchbar.
Deswegen ist das Spannende die Enschlüsselung des Schemas, nach dem die
Datenübernahme in die PWM ausgelassen wird. Das erfolgt nämlich
keinesfalls zufällig, sondern ist offensichtlich sehr gut durchdacht.
Bloss ist das Schema dafür ist halt leider nicht dokumentiert.
Wahrscheinlich hat irgendeine "intellectuell property"-Scheisse das
verhindert...
Wie auch immer: würde das Schema kennen, könnte man die PWM-Erweiterung
darauf abstimmen und so letztlich doch noch das Ziel erreichen.
Wie gesagt, am Wochenende poste ich mal, was ich bisher über dieses
fiese Schema herausgefunden habe und wie ich das gemacht habe.
Das kann ich nicht bestätigen. Alles über >9ns wird als Reset
interpretiert. Du musst also zwischen den Frames mindestens 9ns Luft
lassen.
Ohne das break sind die Treiber noch eingerastet und schieben das Signal
weiter durch. Im Datenblatt stehen min. 50ns aber ab 9ns funktioniert
dies schon.
Die maximale Framerate ergibt sich aus der Länge der Kette,Takt,Reset.
Das Delay zwischen den LEDs ist nicht weiter relevant da es sich ja wie
ein Domino durch die Kette vorsetzt.
Versuchst du BCM(Binary Code Modulation)? Das wird wohl kaum mit einer
besseren Auflösung funktionieren da die Framerate viel höher sein muss.
Einfach mal messen zwischen IN/OUT bei einen erfolgreichen Reset kommt
am OUT für 24 BIT Zyklen nichts raus.
Schon deswegen wäre die Theorie widerlegt da der nachfolgende Treiber
dies als Reset erkennen würde ;)
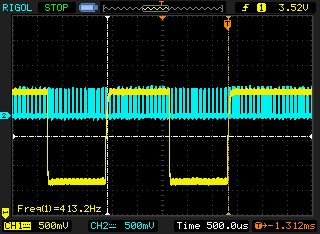
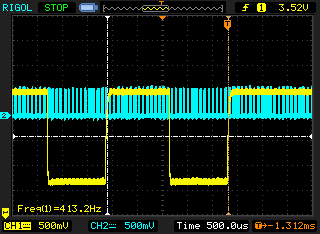
Das ganze ist recht einfach erklärt: Der PWM-Timer ist unabhängig von
der Kommunikationslogik getaktet. Neue PWM-Settings werden nur bei
Überlauf des PWM-Timers übernommen. Die PWM-Frequenz ist etwa 400 Hz.
Man sieht das im Oszilloskopbild oben sehr schön.
Kanal 2: Datain einer WS2812. Die LED wird abwechselnd auf 000000 und
FFFFFF geschaltet. Jeder der sichtbaren blöcke entspricht den kompletten
24 bit.
Kanal 1: Schaltzustand der LEDs, gemessen über Widerstand an VCC.
Wie man sieht, zeigt sich der PWM-Ausgang ziemlich unbeeindruckt von den
vielen Updates, die an die LED gesendet werden. Erst wenn er überläuft,
wird der nächste Datenwert übernommen.
http://wp.josh.com/2014/05/15/getting-physical-to-uncover-neopixel-pwm-secrets/
genau das wird hier beschrieben ;)
Wenn der Pegel 1->0 fällt wird ein interner Timer gestartet, von 0->1
wird er gestoppt. Über 6µs nach dem letztens Bit werden die Daten in
einen Buffer übernommen. Beim nächsten asynchronen PWM Zyklus werden die
Daten aus dem Buffer auf die LED Ausgegeben. Das kann im ungünstigen
Fall ~2ms dauern.
Das bedeutet wenn du die Daten <2ms aktualisierst ist nicht sicher das
sie auch auf die LED ausgeben werden.
Im Normalfall spielt das aber keine Rolle bei mehr wie einen Pixel.
Hi ich hoffe ich bin hier korrekt.
Habe soeben meinen Code compilieren lassen, allerdings bekomme ich bei
diesem Ausdruck:
1
ws2812_DDRREG |= maskhi; // Enable output
diese Fehlermeldung:
> pasting "DDR" and "(" does not give a valid preprocessing token
Womit kann das zusammenhängen?
Ich habe das AVR-Studio 5.1.
Danke im Voraus
Das ist der Beispielcode von Tims Githubprojekt und zwar präzise das
RGB-Blinky-Beispiel
Deswegen hab ich mir gespart, den zu posten, hätte das allerdings
erwähnen sollen :)
Ok, hab den Fehler gefunden:
In der config.h hatte ich den Zielport mit "PORTD" und den Zielpin mit
"PD6" anstatt nur "D" und "6" angegeben.
Jetzt funktioniert es.
Moin!
Schön zu sehen dass ein 3 Jahre alter Thread immer noch genutzt wird.
Ich bin auf ihn gestoßen, während ich dabei war, meine eigene
Implementation in ASM zu schreiben und Probleme bekam.
Vorwort:
Ich bin zwar Beruflich seit vielen Jahren in der Programmierung
(Hochsprachen wie Java/C#, gelegentlich c++) tätig, im
Mikrocontroller-Bereich jedoch nur privat und im kleinen. Bisher habe
ich alle meine Projekte in ASM geschrieben und mit dieser "Library" das
erste mal c genutzt - funktioniert soweit schon mal super!
Da alles funktioniert geht es mir hier nicht um Lösungen, sondern um
Verständnis. Ich habe also versucht, das Rad neu zu erfinden - blöde
Idee, aber ich wollte die Funktionsweise verstehen/nachbauen. Dabei ist
mir das doch recht knappe Timing bei 16MHz aufgefallen. Ein einfaches
Bit zu senden ging ja noch problemlos, das ganze über SubRoutinen zu
lösen dann schon eher nicht mehr (Quarz für 20MHz wollte ich nicht
nutzen, da gerade nicht griffbereit). rcall und ret zusammen sind ja
schon 7 Takte. Habe dann das senden von Bits 24 mal hintereinander
kopiert et voila: ich hatte eine Farbe. Nun ist das leider überhaupt
nicht wartbar und unglaublich hässlich. Daher Google gefragt und auf den
Artikel samt diesen Thread gestoßen, Library geladen, auf den attiny 45
geladen und mich gefreut.
Thema 1:
Nun frage ich mich, wie das mit dem Timing funktioniert und welcher
Compile-Parameter für das Loop-Unrolling verantwortlich ist.
Stichwort Loop-Unrolling: ich vermute(!), dass der Compiler den asm-Code
in der Schleife mit korrekt gesetzten ldi´s immer und immer wieder
hintereinander setzt. Sohätte man nicht das Problem mit der Dauer von
Aufrufen von SubRoutinen. Stimmt das? In der Doku von gcc habe ich auch
diverse Compiler-Parameter gefunden, die das machen können, die werden
jedoch allesamt nicht genutzt. Und bei -O2 (das genutzt wird) steht:
"The compiler does not perform loop unrolling or function inlining when
you specify -O2".
Oder verstehe ich den Compiler da falsch?
Thema 2:
Ich verstehe das "Protokoll" nicht so ganz. der Teil mit 1,25µs je Bit
ist klar, 24 Bit je Farbe auch, n 24 Bit Werte hintereinander steuern n
LEDs an, 50µs low übernimmt die je 24 Bit in die LED und "schaltet" die
Farbe.
Nicht klar ist mir die Pause zwischen Bits / 24 Bits. Müssen die Bits
direkt ohne Verzögerung aufeinander folgen (+- Toleranz)? Gleiche Frage
für die 24 Bits: kann ich dazwischen Pausen <50µs machen, oder stört das
das Protokoll?
Thema 3:
Kann ich nebenbei noch den Timer nutzen, oder stört das den
Programmablauf? Ich möchte nur die ganze Ausführung nach z.B. 30 min
deaktivieren und die LEDs abschalten (ein Pin ist high und schaltet
damit die Versorgungsspannung der LEDs).
Das Ganze wird ein USB-Powerbank-gestütztes Einschlaflicht für meine
Kinder.
Danke im Voraus für eure Antworten, Geduld und das Lesen dieses langen
Posts!
Ben B. schrieb:> Thema 1:> Nun frage ich mich, wie das mit dem Timing funktioniert und welcher> Compile-Parameter für das Loop-Unrolling verantwortlich ist.
Die inner-loop ist komplett in Assembler implementiert. Ein Unrolling
ist nicht notwendig.
Wenn Du das Makefile der Beispiele nutzt, wird als *.lss ein disassembly
abgespeichert. Dort kannst Du Dir den erzeugten Code ansehen.
>> Thema 2:> Nicht klar ist mir die Pause zwischen Bits / 24 Bits. Müssen die Bits> direkt ohne Verzögerung aufeinander folgen (+- Toleranz)? Gleiche Frage> für die 24 Bits: kann ich dazwischen Pausen <50µs machen, oder stört das> das Protokoll?
Jede Pause über 8..9µs wird als reset interpretiert. Die Pausen sollten
als sicherheitshalber nicht länger als 5µs sein.
> Thema 3:> Kann ich nebenbei noch den Timer nutzen, oder stört das den> Programmablauf? Ich möchte nur die ganze Ausführung nach z.B. 30 min> deaktivieren und die LEDs abschalten (ein Pin ist high und schaltet> damit die Versorgungsspannung der LEDs).
Du kannst ohne Probleme die Timer verwenden. Allerdings sollten die
Interrupts während des Schreibens auf der LEDs gesperrt sein, da sonst
das timing durcheinander kommt.
Moin Tim,
Tim . schrieb:> Wenn Du das Makefile der Beispiele nutzt, wird als *.lss ein disassembly> abgespeichert. Dort kannst Du Dir den erzeugten Code ansehen.
hab ich mal gemacht und was soll ich sagen: wow, das ist mal schwierig
zu verstehen. Teilweise noch c-Code (Die while-Schleife) und all die
Sprungbefehle :-) Ich muss mir mal ein einfache Beispiel schreiben und
lernen .lss zu lesen.
Und ich muss mir einmal genau anschauen, wie das mit dem inline-asm
funktioniert. Sieht aber recht einfach aus.
Ich habe noch nicht recht verstanden, wie du das Laden der Farbwerte in
dem knappen Timing schaffst. Theoretisch müsste ja alle 10 Takte ein
neues Farbwert-Bit gesendet werden (das wird durch die asm-loop-schleife
mit brne und bitshifting erledigt, soweit ich das verstehe). danach muss
ja aber auch noch ein neuer Farbwert geladen werden - das ist im
asm-template nicht drin und bedeutet ja weitere Taktzyklen - wo nimmst
du die Zeit her? Dumme Frage vielleicht :-) Für mich sieht das so aus,
als ob die low-Phasen nach jedem Farbwert länger sind. Richtig? Falsch?
Ich hoffe, ihr könnt mein Verständniss für das "wie" etwas vergrößern
;-)
Dank & Gruß,
Ben
Hi Tim bzw. wer mir gerade helfen kann :):
Mein Problem ist der Betrieb bei F_CPU < 10MHz. Sobald ich von meinem
Quarz auf 8MHz (interner Takt oder externer Quarz) umsteige, wird das
vorher funktionierende Leuchtmuster nicht mehr dargestellt.
Ich habe das Troubleshooting durchgegangen und auch "-O3" also "optimize
most" funktioniert nicht.
Meine F_CPU habe ich in einer config-Header-Datei.
Mein Ziel ist, vom Takt her so niedrig wie möglich zu kommen.
Worin könnte mein Problem bestehen?
Danke im Voraus.
Johannes H. schrieb:> Hi Tim bzw. wer mir gerade helfen kann :):> Mein Problem ist der Betrieb bei F_CPU < 10MHz. Sobald ich von meinem> Quarz auf 8MHz (interner Takt oder externer Quarz) umsteige, wird das> vorher funktionierende Leuchtmuster nicht mehr dargestellt.> Ich habe das Troubleshooting durchgegangen und auch "-O3" also "optimize> most" funktioniert nicht.
Bei 8 MHz würde ich eigentlich absolut keinerlei Probleme erwarten. Wenn
Du davon ausgehst, dass es ein Compiler-Problem ist, könnte es helfen,
sich das disassmebly-file (LSS) anzuschauen.
Hast Du auch "-Os" probiert? -O3 hilft auf dem AVR meist nicht viel.
> Meine F_CPU habe ich in einer config-Header-Datei.
Am sinnvollsten ist es, wenn man F_CPU im Makefile definiert.
> Mein Ziel ist, vom Takt her so niedrig wie möglich zu kommen.> Worin könnte mein Problem bestehen?
Prinzipiell sind sogar 4MHz drin. Dort kann es allerdings mit einzelnen
LEDs schon Probleme geben.
Ben B. schrieb:> Ich habe noch nicht recht verstanden, wie du das Laden der Farbwerte in> dem knappen Timing schaffst. Theoretisch müsste ja alle 10 Takte ein> neues Farbwert-Bit gesendet werden (das wird durch die asm-loop-schleife> mit brne und bitshifting erledigt, soweit ich das verstehe). danach muss> ja aber auch noch ein neuer Farbwert geladen werden - das ist im> asm-template nicht drin und bedeutet ja weitere Taktzyklen - wo nimmst> du die Zeit her? Dumme Frage vielleicht :-) Für mich sieht das so aus,> als ob die low-Phasen nach jedem Farbwert länger sind. Richtig? Falsch?> Ich hoffe, ihr könnt mein Verständniss für das "wie" etwas vergrößern> ;-)
Prinzipiell ist nur das Timing innerhalb eines bits kritisch. Zwischen
den Bits kann man sich etwas mehr Zeit nehmen (bis zu 3µs). Daher ist es
kein Problem, ein byte nachzuladen. Eine weitere Optimierung macht hier
keinen Sinn und schränkte nur die Flexibilität unnötig ein.
Tim . schrieb:> Bei 8 MHz würde ich eigentlich absolut keinerlei Probleme erwarten.
Bei 8MHz funktionert es nur mit ausgerolltem outerloop, ein ganzes
Port wird fur ein bit gebraucht ('out Port, Wert') und selbst dann
sind glitches von 125us nicht zu vermeiden.
Wenn man es mit 'sbi Port, Pin' versucht, konnen die Specs nicht
eingehalten werden und glitches sind immer noch drin.
So etwas nenne ich Library fur Optimisten - falls irgendwann mal
WS28xx rauskommt, mit strengem Timing, ist die Library nutzlos.
Tim . schrieb:> Prinzipiell sind sogar 4MHz drin.
Nein, mit Sicherheit nicht. Wie du es auch machst, mit 4MHz bist du
weit aus der Specs raus und kannst nur hoffen, dass die WS2811/2812
Nachsicht mit dir haben.
Marc V. schrieb:> i 8 MHz würde ich eigentlich absolut keinerlei Probleme erwarten.>> Bei 8MHz funktionert es nur mit ausgerolltem outerloop, ein ganzes> Port wird fur ein bit gebraucht ('out Port, Wert') und selbst dann> sind glitches von 125us nicht zu vermeiden.
Bitte? Sorry, das ist absoluter Unsinn. Lies Dir doch den Thread oben
einmal durch.
> Tim . schrieb:>> Prinzipiell sind sogar 4MHz drin.>> Nein, mit Sicherheit nicht. Wie du es auch machst, mit 4MHz bist du> weit aus der Specs raus und kannst nur hoffen, dass die WS2811/2812> Nachsicht mit dir haben.
Bei den WS2812B reicht es. WS2812S und SK6812 sind schneller getaktet,
hier geht es nicht.
Tim . schrieb:> Bitte? Sorry, das ist absoluter Unsinn. Lies Dir doch den Thread oben> einmal durch.
Kann sein, werde mir mal den Thread genau durchlesen und bei github
vorbeischauen.
Tim . schrieb:> Bei den WS2812B reicht es. WS2812S und SK6812 sind schneller getaktet,> hier geht es nicht.
Hier ist es mit Sicherheit reine Glückssache ob es funktioniert, da
weit aus den Specs.
Hi Tim
Ja jetzt mit der F_CPU im Makefile(über die Toolchain-->Symbols)
funktioniert es (Auch bei 4MHz internem AtMega32-Oszillator).
Könnte mir das bitte jemand näher erklären? Da fehlt mir eindeutig noch
tiefergehendes Wissen.
Marc V. schrieb:> Tim . schrieb:>> Bei den WS2812B reicht es. WS2812S und SK6812 sind schneller getaktet,>> hier geht es nicht.>> Hier ist es mit Sicherheit reine Glückssache ob es funktioniert, da> weit aus den Specs.
Der Knackpunkt der Sache besteht darin, zu verstehen wie die
State-machine im WS2812 funktioniert (oben verlinkte Artikel). Es gibt
nur zwei Timings, die überhaupt relevant sind: Die Zeit von der
steigenden Flanke Din bis zum Sampling-Point (~400-600 ns) und die
Reset-Dauer (~5µs).
Der Rest ist komplett unkritisch. Das Protokoll ist deutlich robuster
als es im Datenblatt erscheint. Und das ist auch gut so, da die WS2812
selbst natürlich auch Fertigungsschwankungen unterworfen sind. Die in
der Lib eingestellten Timings berücksichtigen erhebliche Toleranzen. Bei
4 Mhz können diese nicht immer eingehalten werden. Bei 8 MHz ist das
kein Problem.
Johannes H. schrieb:> Ja jetzt mit der F_CPU im Makefile(über die Toolchain-->Symbols)> funktioniert es (Auch bei 4MHz internem AtMega32-Oszillator).>> Könnte mir das bitte jemand näher erklären? Da fehlt mir eindeutig noch> tiefergehendes Wissen.
Wahrscheinlich hat irgendein Teil des Code F_CPU nicht gesehen. Im
Makefile ist das F_CPU define auf jeden Fall richtig aufgehoben.
Tim . schrieb:> Der Knackpunkt der Sache besteht darin, zu verstehen wie die> State-machine im WS2812 funktioniert (oben verlinkte Artikel). Es gibt> nur zwei Timings, die überhaupt relevant sind: Die Zeit von der> steigenden Flanke Din bis zum Sampling-Point (~400-600 ns) und die> Reset-Dauer (~5µs).
Da hast du Recht, habe inzwischen auch meine 8 MHz Routine angeschaut.
Ich habe 6:5 bei Log.1 und 3:8 bei Log.0.
Und habe auch ordentlich kommentiert, dass die Null auch mit nur
2 Takten Log.1 geht...
> Der Rest ist komplett unkritisch. Das Protokoll ist deutlich robuster> als es im Datenblatt erscheint.
Ja, da hast du wieder Recht.
Eine Bibliothek, die "magisch" funktioniert, ist zwar nett - aber so
etwas eigentlich Einfaches kann man auch selber versuchen zu verstehen
und umzusetzen.
Ich wollte das mal auf ATmega328 in physischer Form des Arduino Nano
testen - ohne ASM, ohne besondere Kniffe, direkt als Schnellschuss in
der Arduino-IDE. Lerneffekt beachtenswert.
Schleifen zum Auseinandernehmen des 24-Bit-Werts je LED führen zu
falschem Timing. Ich musste manuelles "loop unrolling" verwenden. Nicht
hübsch, aber funktioniert. Für mehr Ordnung und Übersicht einige
wiederkehrende Funktionsblöcke als inline eingefügt.
Der letzte Fehler kam daher, dass die Arduino-lib den Timer0 aktiviert
und für Delay(), millis() und so weiter nutzt. Auch das stört das Timing
ungemein und führt dann zu Fehlfarben und sporadisch ungewollt
aufblitzenden LEDs.
Hier die korrekte Lösung (im Sinne von: funktioniert wie gewollt):
http://pastebin.com/312fCpxB
Ist recht einfach und übersichtlich, zudem bei den Timern noch mal
aufgedröselt, welche Flags das nun sind.
Farbfehler, wenn die Arduino-lib reinfunkt:
https://youtu.be/h7ubECPKRJs
Korrekt sieht es dann so aus:
https://youtu.be/hwUaI-tJ2UE
Bei der Suche findet man so viel Quatsch und teils unverständliche
Lösungen, da kann eine Variante mehr nicht schaden ;) Vielleicht bastel
ich das noch für den STM32F030 - gegebenenfalls mit N-FET/P-FET zum
sauberen Schalten.
Hallo,
Wie müsste man die Befehle fürs Senden modifizieren, damit das Data-Pin
wie ein OpenCollector/Drain agiert?
Ich möchte nämlich den µC(AVR) an ner 3V Knopfzelle und die LED über
eine 5V Ladungspumpe betreiben.
Danke im Voraus.
Johannes H. schrieb:> Wie müsste man die Befehle fürs Senden modifizieren, damit das Data-Pin> wie ein OpenCollector/Drain agiert?>> Ich möchte nämlich den µC(AVR) an ner 3V Knopfzelle und die LED über> eine 5V Ladungspumpe betreiben.
Die AVR unterstützen, soweit ich weiss, keine echten open-drain
Ausgänge. Die maximale Spannung an den I/O pins sollte nicht über
VCC+0.5V liegen, sonst fängt die Clamp-Diode an zu leiten.
Du benötigst also einen echten Pegel-Converter.
Danke Tim, die Charakteristik hätte ich eigentlich selber nachgucken
müssen...
OK, entweder Levelshifter oder über nen Transistor könnte man es lösen.
(Transistor und 2 Widerstände sind natürlich günstiger im Preis)
Aber falls ich die Transistorlösung wähle, wird das Signal ja
invertiert. Welche Zeilen in Deinem Assemblercode müsste man dann
modifizieren?
Hallo Tim,
hallo alle,
vielen Dank für die super lib, habe damit und den Beispielen in wenigen
Stunden bei meinen bescheidenen C-Kenntnissen einen ATMega mit Stripe
zum laufen gebracht, Animationen erweitert und das Ganze ohne jegliche
Probleme Out of the Box! Echt einfach.... :-)
Nachdem mein Projekt Richtung 2 Stripes geht, und ich noch Platz in RAM
& Flash habe, plane ich den 2. Stripe gesondert anzusteuern (weiß noch
nicht gang genau welche Animationen ich laufen lassen möchte,
auf jeden Fall eher unterschiedliche z.B. 2 Richtungen als exorbitant
schnelle und viele LEDs eher so Richtung 2*100 LEDs).
Ein erster Test den ws2812_pin als (globale) Variable umzudeklarieren
war auch gleich mal erfolgreich.
a) Quick and dirty : Ich lasse die globale Variable, ist zwar bäh, aber
einfach und mit einem Byte RAM :-)
b) Ich bastele an alle Funktionen die ws2812_pin verwenden einfach eine
Variable dran. Wenn ich das richtig verstehe auch nur ein Byte RAM und
schöner und richtiger.
c) Mit viel Phantasie könnte man noch das erste Byte des LED Array
"umwidmen" oder besser vermtl. eine Struct aufbauen. Dann bräuchte man
nicht mal 2 Aufrufe (wenn zum gleichen Zeitpunkt geschrieben werden
soll) sondern könnte das Ziel über die Daten mitgeben und diese einfach
manipulieren. Wäre aber rundweg mehr Tipparbeit da die "led" Struktur
überall in diese Struktur geschoben werden müsste oder wenigstens einmal
zugewiesen / kopiert (Zeiger zugewiesen) werden müsste.
d) Ein weiterer Weg wäre über ein 2. Define, aber wie die Gesamtstruktur
dann aussieht kann ich mir nicht erklären. Und ich glaube dafür gäbe es
Schläge :-).
Ihr seht, meine Erfahrung hält bei Design und sicherlich auch der
Umseztung sich in Grenzen. Auch wenn ich über CTRL-C/V ein klein wenig
hinaus bin tendiere ich zu b). Bin aber nicht sicher ob ich was übersehe
oder das mit den 2 Stripes aus anderen Gründen nicht geht.
Wenn's mehr Interesse gibt, bin ich auch durchaus bereit das nach
Empfehlung runter zu tippen und zu testen. Kann aber bei zu vielen
Zeigern auch scheitern, aber nur so lernt man...
Danke für Eure Unterstützung!
//hufnala
Ich kenne die Lib jetzt nicht so genau, aber es gibt da noch eine
Challenge:
Die beiden Bitstreams müssen dann gleichzeitig gesendet werden und das
ist eine Timing-Geschichte.
Ich habe im Kopf, dass das Timing auf Seiten AVR nicht so viel Luft hat
und mit Berechnung/Vorbereitung der Aminmation und dem Rausstreamen wird
es dann eng, wenn nicht sogar nicht mehr möglich.
Warum nicht einfach die 2 Streifen hintereinander hängen und einfach
separat ihre Werte berechnen?
Das ist einfach eine Halbierung der Frame Rate und wird sicher
funktionieren.
Genau das geschieht umgekehrt mit Deinen Änderungen: Du versuchst eine
Verdoppelung der Frame Rate.
Hi, sorry dass ich mich erst jetzt melde, habe ein paar Tage nicht
gelesen...
Die Antwort ist einfach : Mein Controller war in der Mitte geplant, dann
hätte ich zurück gemusst mit der Data Leitung. Über 4m nicht mein
favorite :-).
Die Frame Rate ist mir egal, ist wie beschrieben eh langsam. Hab mir das
nochmal angeschaut, sollte mit der Maske ja schon gehen, das habe ich
übersehen. Aktuell kämpfe ich mit einem anderen Problem.
Die Lib funktioniert nach Umstellung auf meinem ATMega8 mit 16MHz nur
wenn ich als Optimierung -O3 einschalte. Damit ist der Code aber mehr
als 2k Byte größer als mit -OS. Mit -OS funktioniert (über
Falscheinstellung am Code:Blocks auch OS und O3 gemeinsam probiert)
alles andere (RS232 / IRMP) so dass es irgendwo an der LIB liegen
müsste. Noch sind die 2k mehr kein Problem, aber schön ist was anderes
(ging von 4k auf 6.6k rauf).
Das Timing ist irgendwie seltsam. Bei 8Mhz dachte ich eine Gesamtzeit
des Pakets von 12ms gemessen zu haben. Als es mit 16Mhz nicht
funktioniert hat,
war das ganze bei 6ms, jetzt wo es geht sind es 3ms was wohl auch den
100 LEDs entspricht. Das einzige was ich noch geändert habe ist den
Reset von 300us auf 70us zu ändern, die Einstellung hatte ich übersehen.
Irgendwer eine Idee?
Die IRMP lib ist schon älter, habe nicht den neuesten Stand. Anbei mal
das Hauptprogramm. Die LIB ist die aktuelle aus dem Git.
Hier mal die Meldungen beim Compilieren. AVR gcc ist 4.8.3., aktuell aus
Opensuse Leap 42.2.
1
-------------- Build: Release in Stripe_ATMega8 (compiler: GNU GCC Compiler for AVR)---------------
Hallo,
versuche gerade die Bibliothek auf einem attiny48 zum Laufen zu bringen.
Nur Leuchten die LEDs nur in der initial Farbe.
LEDs: https://www.pololu.com/product/2535 (mit der Arduino Bibliothek
gehen sie)
Kann das sein das der attiny48 nicht supported wird?
Gruß
Phill93
Hallo Forum Gemeinde,
Erst mal ein großes Dankeschön an Tim. Eine echt tolle Lib die Du da für
alle zur Verfügung gestellt hast. Auch Deine Blog habe ich schon
gelesen. Immer wieder toll zu sehen, dass sich Menschen die Zeit nehmen
sich so zu engagieren und sein Wissen mit anderen zu Teilen.
Zu meinem Anliegen:
Nein, ich habe kein Problem mit der Anwendung der Lib bzw. mit der
Ansteuerung der LEDs. Es liegt eher am Verständnis des Codes.
Mir reicht es nicht den Code einfach nur zu verwenden sondern ich möchte
ihn auch gerne verstehen. Daher habe ich mich seit ein paar Tagen mit
den ASM Befehlen beschäftigt. Somit hat sich die Anzahl der Fragezeichen
deutlich verringert.
Ich habe zum Verständnis die Funktion auf die wichtigsten Befehle
reduziert.
Generell ist mir schon klar was die Funktion machen soll. Es gibt eine
äußere und innere Schleife. Die äußere Schleife läuft von 8 bis 0 um die
einzelnen Bit des Bytes zu ermitteln. Die innere Schliefe ermittelt den
Wert des einzelnen Bits um entsprechend die Dauer der Ansteuerung des
logischen Pins zu realisieren.
Die äußere Schleife ist die „i“ Schleife. Diese Schleife scheint das
1
ilop%=:
und
1
b ilop%=
zu sein. Aber wie funktioniert dieser Befehl? Ist
1
ilop
ein frei gewählter Name? Worin besteht der Unterschied zwischen
1
%=:
und
1
%=
? Der
1
b ilop%=
Branch Befehl scheint die Loop so lange abzuarbeiten, bis der Wert „0“
erreicht ist.
Was ich auch nicht verstehe, sind die drei Befehle
1
bcs one%=
,
1
one%=:
und
1
beq end%=
. Ich weiß schon, dass
1
bcs
branch on carry set heißt, aber was heißt das für die Schleife? Zuerst
wird der logische Prozessor Port Pin auf „high“ gezogen. Aber was
passiert danach?
Tim hat am 02.02.2014 mal diese Schleife erwähnt:
1
while(--i){
2
PORT=HI;
3
if(data&128)PORT=LO;
4
data<<=1;
5
PORT=LO;
6
}
Das verstehe ich schon da ja mit der If Abfrage bereits früher der Port
Pin wieder auf low gezogen wird, falls das 8. Bit „1“ ist. (dazwischen
sind ja die unterschiedlichen delay Zeiten)
Aber woher kommt das
1
one
?
1
beq end%=
heißt vermutlich, das zu einem bestimmten Zeitpunkt (branch if equal)
zu
1
end%=:
gesprungen wird. Was wird denn auf
1
eqal
getestet?
Bereits am 09.09.2013 schrieb „Icke ®“ hier im Forum, dass es genial
wäre das Datenbit in das Carry zu schieben. Was ist denn das geniale
daran? Kann mir das einer erklären?
Ich würde mich freuen wenn mir jemand hier im Forum weiter helfen
könnte.
Viele Grüße und noch einen schönen Tag
Deine Fragen zu den Sprüngen zielen auf die Nutzung von Flags ab. Du
solltest Dir einmal anschauen, welche Befehle welche Flags setzen. Der
Code ist teilweise etwas verwirrend, da die Sprungbefehle von Flags
abhängen, die von weiter zurück liegenden Befehlen gesetzt werden.
Im obigen Fall wird das auszugebende bit von "lsl" ins carry-flag
geschoben. Wenn das bit eine "1" war, wird durch "bcs" "str"
übersprungen. "str" zieht den Ausgang vorzeitig auf "0", wenn ein kurzer
Puls ausgegeben wird.
Hallo zusammen,
nachdem hier die Bibliothek vorgestellt und reichlich diskutiert wurde,
dachte ich es ist der richtige Ort um meine Frage zu stellen.
Ich verwende den µC LPC11C24 von NXP, der auf einem ARM Cortex-M0
basiert,
daher möchte ich die light_ws2812_ARM bentutzen.
Da das Vorgehen in der Readme ganz gut beschrieben ist bin ich auch nach
ihr vorgegangen.
Allerdins habe ich folgendes Problem:
In der Readme steht:
- Change i/o pin settings according to the I/O pin you are using:
- Define `LIGHT_WS2812_GPIO_PIN=XXX`
- Define `LIGHT_WS2812_GPIO_PORT=XXX`
Im Code dann:
1
#define ws2812_port_set ((uint32_t*)&LIGHT_WS2812_GPIO_PORT->SET0) // Address of the data port register to set the pin
2
#define ws2812_port_clr ((uint32_t*)&LIGHT_WS2812_GPIO_PORT->CLR0) // Address of the data port register to clear the pin
Die Adresse des von mir verwendeten Port ist 0x40044084, was ich
anstelle von &LIGHT_WS2812_GPIO_PORT eingefügt habe. Jedoch ohne Erfolg.
Kann mir jemand ein Beispiel liefern wie die Umsetzung richtig ist ?
Vielen Dank im Voraus.
> In der Readme steht:> - Change i/o pin settings according to the I/O pin you are using:> - Define `LIGHT_WS2812_GPIO_PIN=XXX`> - Define `LIGHT_WS2812_GPIO_PORT=XXX`
Ich finde leider meinen LPC810 testcode gerade nicht mehr. Generell
heissen die I/O ports auf den kleinen LPCs aber "LPC_GPIO_PORT".
Also:
#define LIGHT_WS2812_GPIO_PORT LPC_GPIO_PORT
#define LIGHT_WS2812_GPIO_PIN XXX
Sehe auch gerade, dass sich im include wohl ein bug eingeschlichen hat.
Kann leider nicht alle ARM-Varianten testen.
> Die Adresse des von mir verwendeten Port ist 0x40044084, was ich> anstelle von &LIGHT_WS2812_GPIO_PORT eingefügt habe. Jedoch ohne Erfolg.> Kann mir jemand ein Beispiel liefern wie die Umsetzung richtig ist ?
Was genau funktioniert denn nicht? Lässt sich der code compilieren?
Liegen am Ausgang signale an? Stimmt das timing nicht?
Ich glaube das erste Problem liegt daran, dass mir nicht ganz klar ist
was durch
1
#define LIGHT_WS2812_GPIO_PORT LPC_GPIO_PORT
2
#define LIGHT_WS2812_GPIO_PIN XXX
erreicht werden soll.
Über
1
LPC_IOCON_TypeDef->PIO3_0
kann beispielsweise auf den Pin 0 vom Port 3 zugegriffen werden.
"LPC_GPIO_PORT" kann ich in CMSIS nicht finden, gibt es das
möglicherweise in den LPC-Bibliotheken ?
Um welchen Bug handelt es sich ?
Das Problem liegt darin, dass sich der Code nicht kompilieren lässt.
Ich würde es sehr gerne Testen und dann ein Feedback geben, da ich das
Projekt sowieso dokumentieren muss.
du fummelst im IOCON Register rum, da werden nur Einstellungen zum IO
Pin vorgenommen.
Bei einem LPC1347 habe ich WS2812B per SPI angesteuert, das geht bei den
LPC gut weil man den Takt für SPI sehr genau einstellen kann.
Hallo Tim,
Bei meiner funktionierenden Elektronik(ATTiny85 & 3 WS2812b) wollte ich
noch etwas die Batterielebensdauer vergrößern und den internen Takt von
8 auf 6,4MHz verringern, was ja einfach mit den CKSEL Fuses eingestellt
werden kann.
Da der µC dann im ATTiny15 Compatibility Mode ist, beträgt der interne
Systemtakt dann 1,6MHz lt. Datenblatt.
Ich habe also im Code die F_CPU auf diesen Wert abgeändert, die Fuses
programmiert und den Code geflasht.
Aber leider ohne erwünschtes Ergebnis.
Gibt es also evtl. noch etwas anderes, was ich anpassen müsste?
Evtl. passt durch den niedrigeren Takt das Timing für das Datensignal
nicht mehr, aber das kann ich mir mangels Messhardware nicht anschauen.
Gruß
Hannes
Johannes H. schrieb:> Systemtakt dann 1,6MHz lt. Datenblatt
Das dürfte deutlich zu wenig sein.
> Evtl. passt durch den niedrigeren Takt das Timing für das Datensignal> nicht mehr
So ist es, WIMRE sind 4MHz schon sportlich.
Johannes H. schrieb:> den internen Takt von> 8 auf 6,4MHz verringernHelmut H. schrieb:> Das Timing wird durch NOPs realisiert
das muss man dann nur erweitern zu 6,4 Mhz
alles lösbarbei dder Arduino fast LED Lib musste ich für den
ATmegas1284p auch eingreifen, der 1284p hat ein Adressregister mehr
welches für 10% langsameres Timing verantwortlich ist.
#if defined(_AVR_ATmega1284P_)
#define NS(_NS) ( (_NS * ( (F_CPU*9L/10L) / 1000000L))) / 1000
#define CLKS_TO_MICROS(_CLKS) ((long)(_CLKS)) / ((F_CPU*9L/10L) /
1000000L)
#else
#define NS(_NS) ( (_NS * (F_CPU / 1000000L))) / 1000
#define CLKS_TO_MICROS(_CLKS) ((long)(_CLKS)) / (F_CPU / 1000000L)
#endif
Joachim B. schrieb:> das muss man dann nur erweitern zu 6,4 Mhz
Was meinst Du mit erweitern?
Die 6,4MHz sind aber nur der Oszillator! Der Systemtakt ist in diesem
Compatibility-Mode aber noch durch 4 geteilt, also nur bei 1,6MHz.
Weiterhin muss ich auch erst mal die aktuelle Bibliothek einbinden. Ich
habe in meinem Projekt noch eine Version von 2018(?).
Johannes H. schrieb:> Was meinst Du mit erweitern?
na die Lib, machte ich ja auch!
Johannes H. schrieb:> noch durch 4 geteilt, also nur bei 1,6MHz
kann man berücksichtigen!
Ich habe mich damals durch den fremden Code gewühlt, das kannst du heute
auch.
Joachim B. schrieb:> kann man berücksichtigen!
Habe keine Ahnung welche Version der library verwendet wurde.
In der oben zitierten wird die Anzahl der NOPs anhand der F_CPU
ermittelt.
Weniger als 0 NOPs wären erforderlich, um das Timing bei 1,6 MHz zu
erreichen. Das mag zwar mathematisch möglich sein, geht aber
softwaretechnisch (noch?) nicht.
aaO:
Helmut H. schrieb:> Weniger als 0 NOPs wären erforderlich, um das Timing bei 1,2 MHz zu> erreichen.
aber es geht nicht um 1,2MHz?
Johannes H. schrieb:> bei 1,6MHz.
sind also nicht weniger als 0 NOPs, ob es für 1,6MHz reicht kann
getestet werden!
aber stimmt schon ist sportlich, wobei ich kaum glaube das es den
Aufwand lohnt!
Johannes H. schrieb:> den internen Takt von> 8 auf 6,4MHz verringern
Joachim B. schrieb:> aber es geht nicht um 1,2MHz?
hatte mich vertippt und später korrigiert.
Die Zeit für low ist zu lang, es braucht 2 Taktzyklen:
((w1_nops+w_fixedlow)*1000000)/(F_CPU/1000)
(0 + 2) * 1000000 / 1600 = 1250
Deswegen wundert es mich, dass es kompiliert.
Einfach mal das Datenblatt der WS2812B hernehmen und rechnen.
https://www.digikey.com/en/datasheets/parallaxinc/parallax-inc-28085-ws2812b-rgb-led-datasheet
Eine Null wird bspw. mit 400ns High und 850ns Low codiert, die Eins mit
800ns High und 450ns Low. Die Toleranz beträgt +-150ns. Bei 1,6MHz
dauert aber ein Takt schon 625ns und für das Toggeln eines Pins mit SBI
werden zwei Takte benötigt. Es kann also mit 1,6MHz nicht funktionieren.
Johannes H. schrieb:> Die 6,4MHz sind aber nur der Oszillator! Der Systemtakt ist in diesem> Compatibility-Mode aber noch durch 4 geteilt, also nur bei 1,6MHz.
und wir wissen nicht mal ob es mit 8MHz (:4) funktioniert.
Sind wir einem Troll aufgesessen?
Icke ®. schrieb:> Eine Null wird bspw. mit 400ns High und 850ns Low codiert, die Eins mit> 800ns High und 450ns Low. Die Toleranz beträgt +-150ns. Bei 1,6MHz> dauert aber ein Takt schon 625ns und für das Toggeln eines Pins mit SBI> werden zwei Takte benötigt. Es kann also mit 1,6MHz nicht funktionieren
dabei ist es dann egal ob 8MHz oder 6,4MHz
Joachim B. schrieb:> und wir wissen nicht mal ob es mit 8MHz (:4) funktioniert.
Der Erfinder der Routine schreibt:
Tim . schrieb:> Das Protokoll ist deutlich robuster> als es im Datenblatt erscheint. Und das ist auch gut so, da die WS2812> selbst natürlich auch Fertigungsschwankungen unterworfen sind. Die in> der Lib eingestellten Timings berücksichtigen erhebliche Toleranzen. Bei> 4 Mhz können diese nicht immer eingehalten werden. Bei 8 MHz ist das> kein Problem.
Joachim B. schrieb:> sind also nicht weniger als 0 NOPs, ob es für 1,6MHz reicht kann> getestet werden!
Ich hab sowas auch mal programmiert. Unter 5 MHz war da praktisch nix
mehr machbar, bestenfalls mit "magischen" Frequenzen, die EXAKT die
Bittimings mit Null NOPs schaffen. Das hab ich dann aber weggelassen,
wozu auch? Es gibt den Sleep Mode, wenn man Strom sparen will!
Beitrag "Re: Frage zu IR-Remote+LED-Strips an AVR"> aber stimmt schon ist sportlich, wobei ich kaum glaube das es den> Aufwand lohnt!
Nö.
Icke ®. schrieb:> Der Erfinder der Routine schreibt:>> Tim . schrieb:>> Das Protokoll ist deutlich robuster>> als es im Datenblatt erscheint.
Da haben schon viele Leute die gegenteilige Erfahrung gemacht.
Hey Leute,
Danke für den detaillierten Input. Dann muss ich anderweitig sehen, ob
ich den Stromverbrauch noch weiter senken kann.
Der µC wird am Ende der while in den "Idle" Modus geschickt und mit nem
TimerInterrupt wieder "Active" gesetzt.
Im PRR habe ich den ADC und das USI deaktiviert. Aber gerade bei Lesen
des Datenblattes gesehen, dass im ACSR noch der Komparator deaktiviert
werden kann. Mal sehen, was das bringt.
Johannes H. schrieb:> Der µC wird am Ende der while in den "Idle" Modus geschickt und mit nem> TimerInterrupt wieder "Active" gesetzt.
Schon mal gut, zieht aber immer noch relativ viel. Deutlich mehr spart
man mit Power Save mode oder gar Power Down. Man kann auch den Watchdog
Timer zum Aufwachen nutzen.
> Im PRR habe ich den ADC und das USI deaktiviert.
ADC ist sinnvoll, USI nicht, denn das zieht praktisch keinen Strom.
> Aber gerade bei Lesen> des Datenblattes gesehen, dass im ACSR noch der Komparator deaktiviert> werden kann. Mal sehen, was das bringt.
20uA.
Der Sinn des Stromsparens bei dieser Anwendung erschließt sich mir
ohnehin nicht. Die paar mAh, die sich beim Controller einsparen lassen,
verbraten die eingeschalteten LEDs in wenigen Minuten.
Falk B. schrieb:> Schon mal gut, zieht aber immer noch relativ viel. Deutlich mehr spart> man mit Power Save mode oder gar Power Down. Man kann auch den Watchdog> Timer zum Aufwachen nutzen.
Hm, das ist ein interessanter Hinweis. Danke! Aktuell nutze ich für die
Leuchtroutine den Timer1 (Timer0 wird fürs Entprellen genutzt).
Diesen könnte ich dann im PRR deaktivieren, falls das genauso mit dem
WatchdogTimer funktioniert.
Icke ®. schrieb:> Der Sinn des Stromsparens bei dieser Anwendung erschließt sich mir> ohnehin nicht.
Also die Platine ist so ein Wearable für Partys/Festivals und wird mit
einer 2032 Knopfzelle betrieben. Aktuell im hellsten Modus(für dunkle
Umgebungen sind die LEDs nur wenig ausgesteuert) hält die rund 8h, aber
wahrscheinlich durch Qualitätsschwankungen bei den Knopfzellen haben die
in letzter Zeit wesentlich kürzer durchgehalten.
Von daher versuche ich nun jede zusätzliche Stromsparmöglichkeit
auszuloten. Im Durchschnitt hat meine Elektronik aktuell maximal 11mA
Stromaufnahme.
Johannes H. schrieb:> Also die Platine ist so ein Wearable für Partys/Festivals und wird mit> einer 2032 Knopfzelle betrieben. Aktuell im hellsten Modus(für dunkle> Umgebungen sind die LEDs nur wenig ausgesteuert) hält die rund 8h, aber> wahrscheinlich durch Qualitätsschwankungen bei den Knopfzellen haben die> in letzter Zeit wesentlich kürzer durchgehalten.
Hier eine Knopfzelle verwenden zu wollen, ist in etwas so sinnvoll, wie
per USB Kabel Starthilfe geben zu wollen.
Es gibt doch kleine, flache LiPos, wie bspw. die Clone vom Nokia bl-5c.
Wie hast du übrigens Ub gepuffert? Ein 1000µ 6,3V Gel-Elko oder Tantal
kann durchaus auch nochmal ne Stunde rauholen, wenn die Stromaufnahme
sehr dynamisch ist. Die Effekte lassen sich da auch anpassen, das wenn
die Batterie dem Ende entgegen geht, vermehrt stroboartige Effekte oder
sowas, wie Knightriderblinken, eingesetzt wird.
Gerald B. schrieb:> Hier eine Knopfzelle verwenden zu wollen, ist in etwas so sinnvoll, wie> per USB Kabel Starthilfe geben zu wollen.> Es gibt doch kleine, flache LiPos, wie bspw. die Clone vom Nokia bl-5c.
Die CR2032 sind nicht für so hohe Ströme ausgelegt. Ihre Kapazität von
ca. 230mAh erreichen sie nur bei Entladung mit Strömen unter 1mA.
https://www.farnell.com/datasheets/1496885.pdf
Es gibt aber kleine LiPo-Zellen mit 300mAh, die nur unwesentlich größer
und mit 11mA eher unterfordert sind. Die sollten einen 24h Rave
problemlos durchhalten.
Icke ®. schrieb:> Es gibt aber kleine LiPo-Zellen mit 300mAh, die nur unwesentlich größer> und mit 11mA eher unterfordert sind. Die sollten einen 24h Rave> problemlos durchhalten.
Ja, ein Akku wäre mir auch lieber gewesen. Aber die Platine habe ich an
viele Freunde verteilt und es musste eine Energiequelle sein, die man
einfach austauschen kann, ohne dass extra noch ein Ladegerät nötig ist.
Und eine USB-Buchse samt Ladeschaltung hätte die Platine auch wieder
größer gemacht.
Und wenn man die Knopfzellen in größeren Mengen bestellt, dann kommt man
auf nen Einzelpreis von ~30cent.
Gerald B. schrieb:> Wie hast du übrigens Ub gepuffert? Ein 1000µ 6,3V Gel-Elko oder Tantal> kann durchaus auch nochmal ne Stunde rauholen, wenn die Stromaufnahme> sehr dynamisch ist.
Ich hab einen 4,7µF Keramikkondensator verwendet. Also werde ich mal
etwas noch größeres einbauen.


{kind=link}