
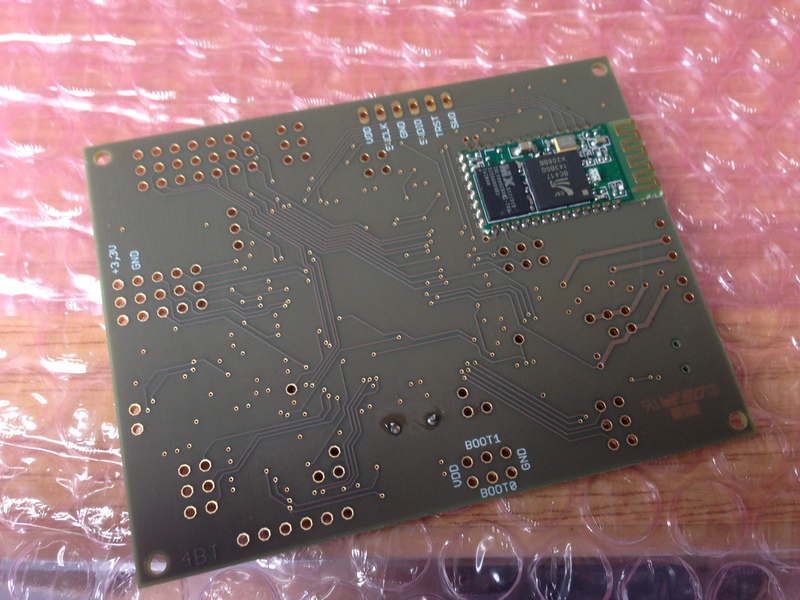

Hi Forum, endlich ist es soweit! Nach einem Jahr Entwicklung, würde ich euch hiermit nun gerne darüber Informieren, das die Finale Version meiner Mehrzweck-IMU zur Verfügung steht. Die Idee dahinter war eine Leistungsstarke Plattform zu entwickeln, um diverse Inertialsensor Applikationen realisieren zu können wie bspw. Autopiloten, Bewegungserkennung, Navigation / AHRS ... und alles OpenSource... Es ist mal Zeit was der Community zurückzugeben!! Um das Projekt anzutreiben und Interessenten zu wecken, Würde ich im selben Zuge meine OpenSource Eclipse Projektumgebung zur Verfügung stellen. Es beinhaltet: Laufähige Umgebung mit FreeRTOS - USB CDC (VCOM) Treiber - SD-Karten Treiber - GPS Treiber (USART) - Sensoren Treiber - FreeRTOS mit FPU und MPU - Bluetooth Modul Treiber Alle Treiber sind speziell für das FreeRTOS entwickelt (Interrupt, DMA, ques...). Das Beispiel-Projekt gibt alle Sensordaten und Winkeldaten (R,P,Y) per USB-VCOM aus. Im prinzip also eine gute Basis! Zur Hardware: - STM32F407ZGT6 (1MB Flash, 192Kb Ram...Pinkompatibel mit STM32F27 mit 2Mb Flash) - Bluetooth Modul (Class2) auf Rückseite - Stabiles USB (Device und sogar Host) - MicroSD Kartenslot - 5V und 3,3V Regulator, Boot-Pins für Bootloader - 4 LED's - 1 Reset und 1 User Button - EMV gerechtes Design - 8 Mhz Quarz - Diverse Pins ausgeführt für PWM/TIMER/I2C/SPI/USART/UEXT... - SWD Pins sind 1:1 Kompatibel mit dem des STM DiscoveryF4 Boards. Also einfach 6 Leitungen rüberwerfen und man kann flashen und debuggen - Akku Input - Spannungsversorgungswahl (Jumper: 5V von USB oder Regulator. Jumper: Akku oder USB Versorgung ) Sensoren: -- MPU9150 Accel+Gyro+Mag -- LSM303DLHC Accel+Mag -- L3GD20 Gyro -- MS5611 Barometer -- Temperatur Woran ich/wir noch gerade arbeiten aber bald fertig ist: - Verbesserter Extended Kalman-Filter welcher von zwei Sensorquellen gespeist wird (deswegen auch 2x Sensoren) - Eigenes Protokoll für die Host Applikation auf Windows - Motor-Regelung für BLDC Module - Verbesserung des AHRS und entsprechende GUI Wer Interesse hat mit zumachen: Die Hardware/PCB würde ich zur Verfügung stellen, gerne bereits Vollbestückt oder Teilbestückt. Meine Idee war es genügend zu finden um eine große Stückzahl herzustellen. Damit wir die für 75€-200€ (?) pro Stück herstellen könnten. Aktuell schreibe ich gerade das Wiki zur IMU und würde es dann sobald es fertig ist freischalten. Design-Erweiterungen, Addons sind willkommen! Vielleicht macht jemand noch ein cooles Gehäuse (79x60mm) :-) MfG Sven
Angehängte Dateien:
-

Foto_2.JPG
250 KB -

Foto_3.JPG
200 KB -

Foto_1.JPG
290 KB
Hi Sven, Super Plattform. Hast du vllt auch an Can gedacht. Bei der HW wären BLDC Treiber die etwas mehr können doch interessant. Denke da speziell daran die Motoren mit zu modellieren in dem EKF, Um dann ne Zustandsregelung zumachen. Ich bin gerade in der Planung für n BLDC Treiber mit dem STM32F3 und wollte Can als Interface nutzen. PPM usw. gibt ja nicht viel her. MfG Tec
Angehängte Dateien:
-

Foto_klein.JPG
110 KB

Hi Tec, Das hört sich echt interessant an! Ich hab schon von vielen gehört, dass das BLDC Interface per PPM zu lahm ist. Wie wollen wir das angehen? ja ich hab die CAN-Bus Pins rausgeführt und die PHY auf einer zum Layout passenden Aufsteckplatine. Ich kann die Phy auch auf der Unterseite der Platine anbringen bei einer nächsten Version falls das gern gesehen ist. Ich wollte ja noch mehr auf die Aufsteckplatine bringen: GPS, RFM22 Transciever, CAN evtl. LAN und RS485, Display. Viele Grüße Sven
Hi Sven, wenn Can drauf,bzw. verfügbar ist wäre ich schon an einem Board interessiert. Für die BLDC Version mit dem F3 bin ich noch am Bauteile gucken. bzw ich bin noch unsicher über die Leistungsklasse für den Prototyp, weil ich das Ding recht universell halten will. Frei nach dem Motto mit deiner Platine zusammen vom Copter bis zum Segwayersatz machen. Müsste nur ne andere Powerstage machen. Problem bei einem 20A Copter Regler lohnt keine separate Powerstage. Dabin ich noch am überlegen, wie das mache. SW mäßig arbeite ich auch mit FreeRTOS. Mal ne OT Frage: Wo hast die Platinen machen lassen? Sehen super aus. China? MfG Tec
Hi Tec, falls du hilfe beim FreeRTOS brauchst gib bescheid. Ja stimmt, universell wäre interssant. Powerstages von TI sind sehr gut, die geben auch einem gleich ein angepasstest REferenzlayout. Ich hab hier mal einen Chip gesehen welcher schon komplett fertig war müsste nur mal schauen wie schnell der Ansteuern kann. Nein das ist alles deutsche Handwerkskunst (das Bestücken jedenfalls) :-) Die Platinen kommen von Eurocircuits. MfG
Angehängte Dateien:
-

IM000084__FILEminimizer_.JPG
120 KB -

IM000082__FILEminimizer_.JPG
86 KB

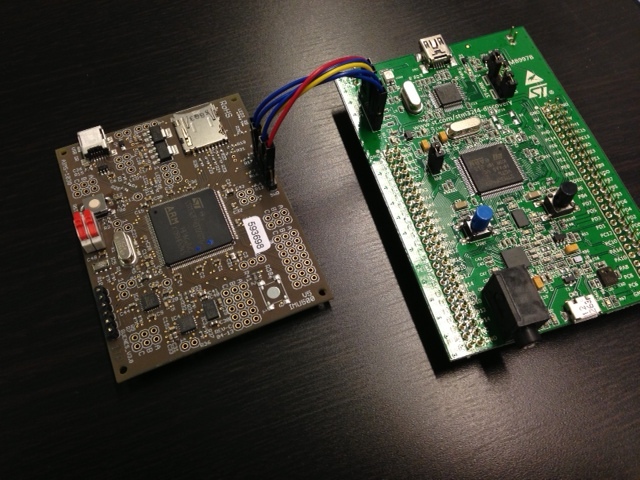
Ja, - ich geb's zu! Dein Board ist erheblich kleiner ...
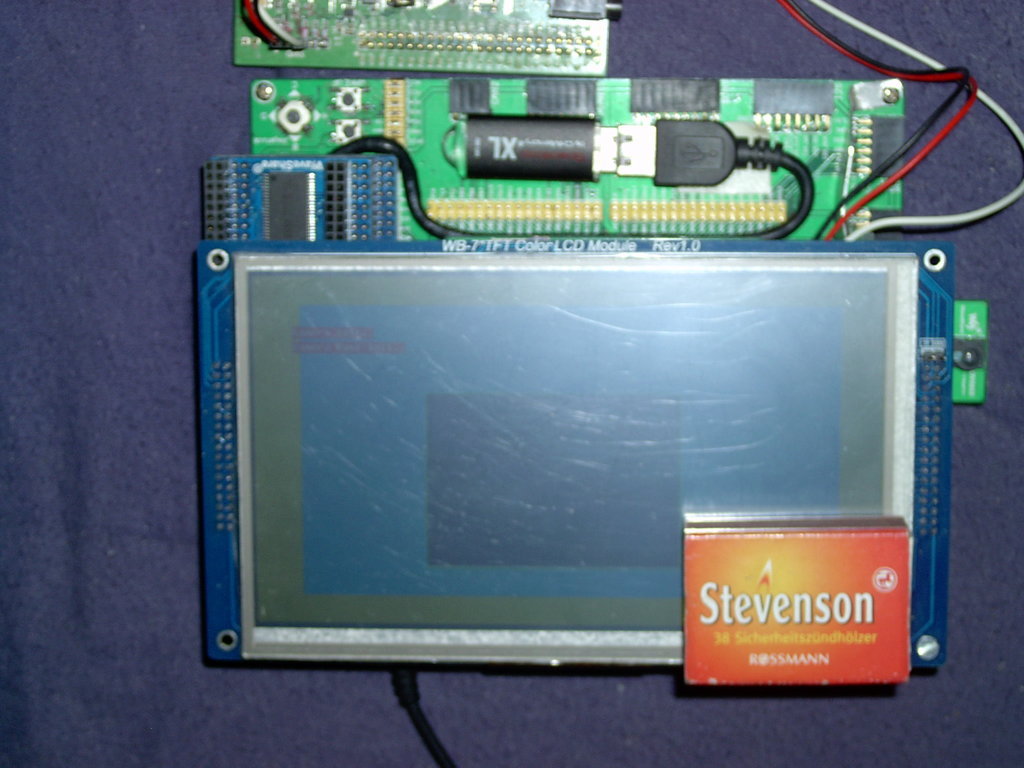
Ahh Vampire cool! HAst du das display auch am STM32 ? Wie hast du es angeschlossen und könntest du den Treiber vielleicht rausrücken? Ich hab das selbe Display nur mit NXP Treiber... das hab ich gestern erhalten.
Hallo, alter Kämpe! Such ich raus, -dauert aber etwas(bin grad anderweitig).
War mir doch so, das ich es schonmal hier aufgezeigt hatte: Beitrag "Re: Open407I-C (Board für STM32) mit OV9655 (Kameramodul) auf 5"-Touchdisplay" -dort suchen LCD.c void LCD_Initializtion(void) die "init" für alle mir bekannten LCD runter bis else **** die funktioniert; Viel Spaß mit einem neuen LCD (beim Touch hab' ich aufgegeben --)
Nice. Hätte auch Interesse an einem. Wenn es CAN hat würde es gut zu meinem neuen CAN Brushless Controller passen. Kleine Demo gibts hier übrigens: http://www.youtube.com/watch?v=8TQYQSgo0ms&feature=youtu.be
Angehängte Dateien:
-

can.JPG
43 KB
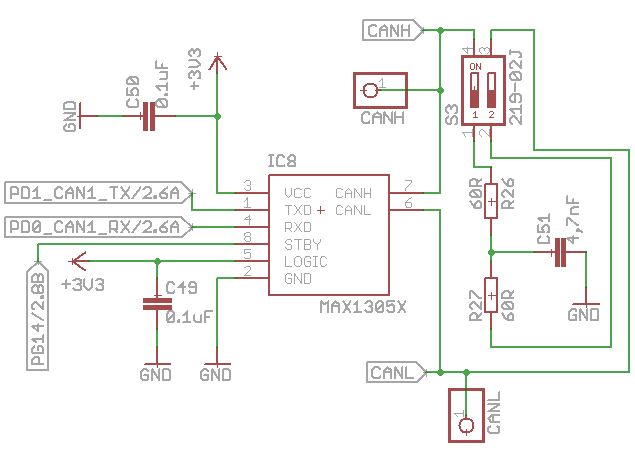
Was haltet ihr dann davon das ich die Aufsteckplatine standardtmäßig mit can versehe? Das sieht übrigens so aus.
so lange ich nicht CAHN-BUS schreibe ;)
Sven S. schrieb: > so lange ich nicht CAHN-BUS schreibe ;) Das wird dann aber Kahn-Bus geschrieben ;-)
Nur wenn man Trekki ist "Der Zorn des CAHN...BUS" :-D
Sven S. schrieb: > Was haltet ihr dann davon das ich die Aufsteckplatine standardtmäßig mit > can versehe? > > Das sieht übrigens so aus. Thumbs up :) Für was ist denn der 4n7 Kerko?
Hier übrigens mein BLDC-IC Treiber den ich meinte... was haltet ihr von dem ? Beitrag "BLDC Treiber-IC"
oder Dschingis CAN da hat Bit(ch)-Banging gleich eine andere Bedeutung :)
hahahaha! +1 Ne den Kerko hatte ich so übernommen aus dem Application Note.
er geht auf "Nummer sicher"! Herkunft: englisch standard, eigentlich = Standarte, Fahne (einer offiziellen Institution) < altfranzösisch estandart, ↑Standarte aus: http://www.duden.de/rechtschreibung/Standard_Norm_Richtmasz_Guete
Das Bluetooth Modul dürfte eher schlecht funktionieren, da die KeepOut Area der Antenne nicht eingehalten wurde (siehe OP Foto_3). Da darf kein Kupfer drunter sein, und der SD Schacht schirmt auch noch zusätzlich ab. Den Fehler hatten wir auch mal gemacht, das Ergebis war nicht berauschend: Ein Class 2 Modul schaffte unter ungünstigen Bedingungen - Leiterplatte im Weg - nichtmal die 10 Meter von Class 1.
Also die VDD,GND Layer drunter sind ja freigehalten. nur das µSD-Karten Modul ist drüber ... Ich hatte das Board in der ersten Revision so designed, das die Antenne rausschaut und nun versenkt ist (wegen dem Gehäuse). Die Reichweite ist die selbe (ca. 8m). Das Bluetooth modul ist von Seeeduino und muss nicht bestückt werden. Über die SPI/UART hab ich im moment das Wifi Modul von Olimex dran (Microchip schlagmichtot b/g). Ich sende über einen UDP Socket an meinem PC um die Messdaten aufzunehmen... ist eigentlich auch ganz cool. Wie gesagt die Bestückung ist ja nicht zwingend ;-)
Gehen beide Module auf die selben Pads? also das Wifi und BT Modul? MfG Tec
Hi, ganz nettes Projekt! Ich wollte auch schon in die Richtung, aber Zeitlich und vom Umfang habe ich wieder Abstand genommen. Ich habe eine eigene LM3-Platine auf ein 3er Hutschienengehäuse optimiert (90x50 etwa), es ist noch reichlich Platz. Netzwerkbuchse ( ja die LM sind da etwas einfacher ;-) ), SD-Card, DC/DC bis 35V (theoretisch bis 60V), RTC+Backup und CAN-Bus. Den Rest der Pins habe ich auf 1.27mm Raster gepackt. Hast du dir schon Gedanken um das Gehäuse gemacht? :-) Oder soll es ein Testboard bleiben? Was kostet etwa die Bestückung der Prototypplatinen (Maschine oder per Hand)? Ich frage nur interessehalber, sieht sehr sauber aus. Grüße.
Hi klingt auch sehr interessant, ich hab mit dem LM3 noch nie gearbeitet, ist das Ethernet dort einfacher zu realisieren, vom Stack?. Ich hatt mir ein Gehäuse vorgestellt, wo die Jumper Pins frei bleiben für die Aufsteckplatine. Ich hab auch bereits eine auf dem STM32F427 basierende SPS realisiert und in ein Phoenix Contact ME-PLC reingedrückt. Sieht echt hübsch aus. Meine Module kommunizieren auch via CAN. Die I/O Module haben alle einen STM32F3 drin, weil die in der Stückzahl sehr günstig sind (100 Stück = 3,5€) Also die Bestückung kostet bei der Menge die ich machen lassen hab schon einiges >1k€. Wie gesagt, in der Menge wirds günstig ... Wenn ich 1000 STück machen lassen könnte wäre es prima :D.
Sven S. schrieb: > Hi klingt auch sehr interessant, ich hab mit dem LM3 noch nie > gearbeitet, ist das Ethernet dort einfacher zu realisieren, vom Stack?. Von der Hardware ist es einfacher, da der Phy/Mac integriert ist, also keine externen Bauteile bis auf Hühnerfutter und die Netzwerkbuchse. Von der Softwareseite ist es auch nicht viel schwerer. Ich benutze LWIP als Stack und die Anbindung der Peripherie ist auch überschaubar. Leider hat der LM3 keine DMA, aber die Performance ist ausreichend. Ich benutze den LM3 als Logger/Steuerung für die Heizung. Die restlichen CAN-Module bauen alle auf dem STM32F1 auf. Schön klein und passen in ein 1E Hutschienengehäuse.
@Tec Gehen beide Module auf die selben Pads? also das Wifi und BT Modul? MfG nein das Wifi Modul sitzt aber auf der Jumperleiste rechts oben.
ah ok. ich nehme Messwerte immer über XBee auf, aber Wlan ist natürlich cool braucht man nix am Laptop anschließen.
Ganz nettes Board - einige wahllose Anmerkungen und Gedankengänge:
- Warum die Vias in den USB-Nicht-Striplines?
- Warum keine Mosfets als Verpolungsschutz?
- Warum keine Schaltregler sondern Leistung an LDOs verbraten?
- Warum so eine große Platine? Decoupling auf die andere Platinenseite
(kein Problem - auch nicht für Bestücker) und das andere Hühnerfutter
auch. Die Platine kann man auch nur halb so groß machen. Von mir aus
könnte da auch die Sensorik auf BOT oder zumidnest Teile davon
- Quarz Stichwort Vibrationsempfindlichkeit?!
- Mir fehlt da ein guter Elko
- Ein Via-Zaun um den Außendurchmesser mit 10mm -> EMV
- Groundplane größer als Vcc-Plane ?!
--||--- SIG ------- ...
-----||--- GND ------- ...
--||--- VCC ------- ...
--||--- SIG ------- ...
Via
- Resettaster weglassen - außer für Bootloader sowieso nutzlos bzw. ohne
Verwendung. 2x 0603 0R so nah wie möglich parallel angeordnet zusammen
als blinde Enden die man mit der Pinzette kurzschließen kann ->
Bootlader
Reset
|
- -
| || |
| || |
- -
| |
GND
bei 0603 kann man dann beide beliebig mit einer Pinzette überbrücken.
Spart Platz und Gewicht.
- USB-OTG für Firmwareupdate
- RS485 Transceiver
- CAN Transceiver
sonst sehr nettes Board - endlich jemand der sich 4 Lagen traut
wo hast du bestellt ?
Michael schrieb: > Ganz nettes Board - einige wahllose Anmerkungen und Gedankengänge: > > - Warum die Vias in den USB-Nicht-Striplines? Was verstehst du unter Striplines? :-) Der Begriff sagt mir gerade so nichts, hört sich interessant an. > - Warum keine Mosfets als Verpolungsschutz? Das kann ich noch machen, ich hab an den VDD Supply eine BatJ60film Diode drin zum Verpolungsschutz. > - Warum keine Schaltregler sondern Leistung an LDOs verbraten? Weil die 10cent kosten aber falls du eine 'etablierte' Schalträgler Schaltung hast implementier ich die gerne ein (In 6 - 17V, Out 5V & 3,3V) > - Warum so eine große Platine? Decoupling auf die andere Platinenseite > (kein Problem - auch nicht für Bestücker) und das andere Hühnerfutter > auch. Die Platine kann man auch nur halb so groß machen. Von mir aus > könnte da auch die Sensorik auf BOT oder zumidnest Teile davon Ich musste ja die µC Pins ausführen, die Brauchen platz genauso wie das Bluetoothmodul und der µSD-Slot. Ich hab auch drauf gachtet das die beiden Magnetometer nicht zuviel powerlines in der Nähe haben um die Störeinflüße zu minimieren, die sind leider sehr empfinglich gewesen als ich z.B. mit der VDD leitung drunter gerauscht bin bei Revision 1. > - Quarz Stichwort Vibrationsempfindlichkeit?! Der Quarz läuft eigentlich sehr gut. Ich verwende die Schaltung schon in vielen Design, hatte eigentlich nie Probleme mit dem Schwinger. > - Mir fehlt da ein guter Elko Als Eingansbackup? > - Ein Via-Zaun um den Außendurchmesser mit 10mm -> EMV Kannst du mir hierzu ein Beispiel geben? > - Groundplane größer als Vcc-Plane ?! > > --||--- SIG ------- ... > -----||--- GND ------- ... > --||--- VCC ------- ... > --||--- SIG ------- ... > Via Genau so ist es gemacht. die GND ist größer wie die anderen. > - Resettaster weglassen - außer für Bootloader sowieso nutzlos bzw. ohne > Verwendung. 2x 0603 0R so nah wie möglich parallel angeordnet zusammen > als blinde Enden die man mit der Pinzette kurzschließen kann -> > Bootlader > > Reset > | > - - > | || | > | || | > - - > | | > GND > > bei 0603 kann man dann beide beliebig mit einer Pinzette überbrücken. > Spart Platz und Gewicht. > Gerade der Taster war praktisch hinsichtlich debuggen mit Eclipse. Der GDB Server brauch oftmals mal ein Reset. Ich bin hier auf der suche nach einem halb so großen SMD switch, ich finde bestimmt noch einen. > - USB-OTG für Firmwareupdate OTG ist drauf :) > - RS485 Transceiver > - CAN Transceiver Die hab ich jetzt mit einer Micrel Phy auf der Aufsteckplatine für die oberen pins. Läuft eigentlich gut. > sonst sehr nettes Board - endlich jemand der sich 4 Lagen traut > wo hast du bestellt ? Ich habs machen lassen bei Eurocircuits. Vielen dank für das Feedback! Das ist genau das was ich gebraucht hab! Vielleicht kannst du mir die Fragen beantworten :)
Sven S. schrieb: > Gerade der Taster war praktisch hinsichtlich debuggen mit Eclipse. Der > GDB Server brauch oftmals mal ein Reset. Ich bin hier auf der suche nach > einem halb so großen SMD switch, ich finde bestimmt noch einen. Die sind ganz nett ;-) http://de.mouser.com/ProductDetail/Omron-Electronics/B3U-1000P-B/?qs=AO7BQMcsEu6QxhKppRpaJA==
die mach ich drauf ! die hab ich nämlich gerade gesucht.
Angehängte Dateien:
-

2013-06-14_16.44.36.jpg
100 KB
Wenns noch kleiner werden soll. Z.B. auf dem Beaglebone ist ein Taster direkt neben dem RJ45 Jack. Der ist ca. 2x3 mm.
ich hab davon jetzt 50 stück bei mouser bestellt.... ich hatte noch nen gutschein.
Sven S. schrieb: > Michael schrieb: >> Ganz nettes Board - einige wahllose Anmerkungen und Gedankengänge: >> >> - Warum die Vias in den USB-Nicht-Striplines? > Was verstehst du unter Striplines? :-) Der Begriff sagt mir gerade so > nichts, hört sich interessant an. Stripline bezeichnet eine impedanzkontrollierte (Wellenwiderstandskontrollierte) Leiterbahn. Das ist bei USB normalerweise angesagt da USB ja bekanntlicher Weise eine differentielle Übertragungsweise nutzt. Google mal danach - das ist eine Wissenschaft für sich. Ich würde auf Vias in USB-Leitungen verzichten. Sven S. schrieb: >> - Warum keine Mosfets als Verpolungsschutz? > Das kann ich noch machen, ich hab an den VDD Supply eine BatJ60film > Diode drin zum Verpolungsschutz. Über nem Mosfet fällt halt so gut wie garnichts ab. Nur RDSon der liegt bei 30mOhm. Sieh http://www.lothar-miller.de/s9y/categories/39-Verpolschutz nimm nen P-Ch und gut is. Sven S. schrieb: >> - Quarz Stichwort Vibrationsempfindlichkeit?! > Der Quarz läuft eigentlich sehr gut. Ich verwende die Schaltung schon in > vielen Design, hatte eigentlich nie Probleme mit dem Schwinger. Ich meinte im Bezug auf Vibrationen da IMU = Modellbau, Segway, ... = Vibrationen. Manche Quarze gehen da binnen ein paar Stunden hops wenn sie in einer vibrierenden Umgebung sind. -> Datenblatt. Sven S. schrieb: >> - Mir fehlt da ein guter Elko > Als Eingansbackup? Ja. Ein Keramik auch mit 10uF hat nicht die Qualität wie ein Elko mit 10uF und low ESR Sven S. schrieb: >> - Ein Via-Zaun um den Außendurchmesser mit 10mm -> EMV > Kannst du mir hierzu ein Beispiel geben? Einfach Vias alle 10mm um die Platine rum. Also auf TOP, BOT, MID1 und MID2 einen 3-5mm breiten GND-Streifen ganz um die Platine rum. Und den entlang seiner Länge alle 10mm mittig ein Via rein das alle 3 Streifen + GND - Plane verbindet. Klar oder soll ich dir was zeichnen? Sehr cool - ich werd nochmal schauen ob mir die Sensoren passen aber sonst wäre ich natürlich auch bei einer IMU dabei. Womit hast du gezeichnet? Eagle? Altium?
Angehängte Dateien:
-

Qboard.JPG
600 KB
Meinst du sowas mit Gartenzaun? .. Ich hab das mit Eagle gemacht. Das USB arbeitet trotz Vias eigentlich einwandfrei. .. Ich hab inzwischen einen Änderungskatalog: - I2C mit Pegelwandler auf 5V für Motorregler. - 8 PWM Ausgänge(Hier reicht 3.3V) als Alternative für billige Modellbauregler. - RFM22 Funkmodul - CAN - USB zum debuggen - irgendein gutes GPS wäre super. - 45 x 45 Löcher (Passt auf Mikrokopter und Hobbyking Rahmen) - SMA Buchse für RFM22 Antennenanschluss (weibliche Buchse) - Akku Spannung an einen ADC Pin. - Spannungsversorgung im Bereich 8...20V (Wenn wir mehr als 4 Zellen Lipos wollen dann auch mehr) - dann noch so klein wie möglich
... die eierlegende Wollmichsau. Ich würde es so machen, das es für DICH passt. Wofür CAN, I2C und PPM? Solche Universalboards gibts doch schon (z.B. http://paparazzi.enac.fr/wiki/Main_Page). Das wird dann alles teuer und man hat HW die man nicht braucht.... Und bezahlen tut dich auch keiner dafür, oder? Nur meine Meinung ;)
Kai O. schrieb: > ... die eierlegende Wollmichsau. Ich würde es so machen, das es für DICH > passt. Wofür CAN, I2C und PPM? Solche Universalboards gibts doch schon > (z.B. http://paparazzi.enac.fr/wiki/Main_Page). > > Das wird dann alles teuer und man hat HW die man nicht braucht.... Und > bezahlen tut dich auch keiner dafür, oder? Nur meine Meinung ;) 17 Steckverbinder auf geratenen 5x5cm, das ist schon toll.
Ingo schrieb: > Welche Software hast du für das WLAN-Modul verwendet? > Die von Microchip? Portiert auf den STM32? Das ist BT417, hier steht nichts von WLAN!?
Nee er meint das Wifi Modul welches ich angeschlossen hab via UEXT. Da benutz ich tatsächlich den Microchip Stack auf dem st. Also ich werde auf jedenfall die Basisplatine noch ein wenig verändern hinsichtlich der Spannungseingänge. und eine aufsteckplatine machen welche dann GPS, CAN (den brauch ich nämlich selbst) hat. die Pads bereit zu legen für i2c pull ups etc. ist ja wohl kein problem. Die aktuelle Version ist halt super was die Anschlussmöglichkeiten angeht.
Der ist auch STM32F4 und hat 5x6 cm (2 Layers). http://paparazzi.enac.fr/wiki/KroozSD Da könnst mal schauen wg. dem Schaltregler (bis 35V, 8S). Wenn du dein Board kleiner und billiger machen würdest, wär schon geil.
.. CAN hat das Franzboard nicht. Da ist deins besser :)
gebt mir mal paar tage zeit, dann zeig ich euch mal die kleinere version, ich mach die mal 2 Layer für euch. Dann hätten wir die große version mit CAN und die kleine Version in 2 Layer und CAN 50x50mm.
Sei etwas vorsichtig mit dem Wifi-Code für den MRF24. Soweit ich mich erinnern kann, darf der Microchip-Code (zumindest Wifi-Teil, beim TCP/IP-Stack müsste man nachschauen) nur auf Microchip uC verwendet werden, nicht auf dem STM32. Siehe Punkt (i) im Header jedes Source-Files: Software License Agreement Copyright (C) 2002-2010 Microchip Technology Inc. All rights reserved. Microchip licenses to you the right to use, modify, copy, and distribute: (i) the Software when embedded on a Microchip microcontroller or digital signal controller product ("Device") which is integrated into Licensee's product; or (ii) ONLY the Software driver source files ENC28J60.c, ENC28J60.h, ENCX24J600.c and ENCX24J600.h ported to a non-Microchip device used in conjunction with a Microchip ethernet controller for the sole purpose of interfacing with the ethernet controller. You should refer to the license agreement accompanying this Software for additional information regarding your rights and obligations. THE SOFTWARE AND DOCUMENTATION ARE PROVIDED "AS IS" WITHOUT WARRANTY OF ANY KIND, EITHER EXPRESS OR IMPLIED, INCLUDING WITHOUT LIMITATION, ANY WARRANTY OF MERCHANTABILITY, FITNESS FOR A PARTICULAR PURPOSE, TITLE AND NON-INFRINGEMENT. IN NO EVENT SHALL MICROCHIP BE LIABLE FOR ANY INCIDENTAL, SPECIAL, INDIRECT OR CONSEQUENTIAL DAMAGES, LOST PROFITS OR LOST DATA, COST OF PROCUREMENT OF SUBSTITUTE GOODS, TECHNOLOGY OR SERVICES, ANY CLAIMS BY THIRD PARTIES (INCLUDING BUT NOT LIMITED TO ANY DEFENSE THEREOF), ANY CLAIMS FOR INDEMNITY OR CONTRIBUTION, OR OTHER SIMILAR COSTS, WHETHER ASSERTED ON THE BASIS OF CONTRACT, TORT (INCLUDING NEGLIGENCE), BREACH OF WARRANTY, OR OTHERWISE.
Das kann garnicht sein, wir benutzen auch den Microchip stack portiert auf einem EFM32 - da haben wir sogar support vom microchip FAE bekommen. Ich denkr was da mal jrmand reingedchrieben hat und wie die realität ausschaut ist nicht das selbe.
Ich hatte vor langer Zeit (1 Jahr?) mal nachgefragt und mir wurde vom Microchip-Support bestätigt, dass das Copyright so gilt. Es kann sich aber mittlerweile geändert haben. Ich wäre auch froh, wenn es nicht mehr so ist, mir wäre es aber lieber, wenn ich es irgendwo schriftlich hätte. Weiß vielleicht jemand eine Webseite bei Microchip oder ein Microchip-Dokument, in dem es explizit erlaubt ist?
Es gibt den "alten" Microchip Stack, der darf portiert werden, der aktuelle aber nicht.
chris schrieb: > Es gibt den "alten" Microchip Stack, der darf portiert werden, der > aktuelle > aber nicht. Was ist alt (Version) und wo gibt es den?
Die Alte Version müsste 3.irgendwas sein, aber je nach veränderter Datei dürftest du auch eine neuere Version portieren, solange du ein Microchip Eth-Chip verwendest, was ja bei dir der Fall ist (Wlan), da darfst du aber nur 4-5 Files ändern, genaueres über Lizenzabkommen. Wired ETH dürftest du aber nicht verwenden, bzw nur mit dem alten Stack.
SORRY JUNGS!!! ich verwende das modul hier mit integriertem Stack!! http://de.mouser.com/Search/ProductDetail.aspx?R=RN171XVS-I/RMvirtualkey66230000virtualkey765-RN-XV-S ich hab das verwechselt!
hej sven. Was mir noch eingefallen ist. Ich bin mir nicht so sicher ob diese stiftleisten den vibrationen standhaltrn. Habe z.B. auf meinembld c die Stecker von jst (ph 4). verwendet. canlow, canhigh, masse, 5v. Die sitzen ziemlich stramm. Man braucht aber ne krimpzange fuer die kabel. janz jut ist die engineer pa 9. amazon 60 euro. spannungsversorgung find ich auch nicht unwichtig. versorgung ueber den can stecker. Mit 4 x 80ma @ 5v. Deswegen der schaltregler auf die imu und auf den bldcs ist nen kleiner low droplinearregler 5v-» 3,3v. soory fuer tipos. von meinem smartphone.
Den Stepdown hätte ich gerade auf die Regler gepackt. Bzw. ne extra Platine gemacht die die Spannung verteilt an die Regler. N Stepdown in der nähe speziell der Magnetometer und vom Funk finde ich suboptimal. MfG Tec
Habe noch etwas aus der Schweiz gefunden: http://store.3drobotics.com/products/px4fmu-1 STM32F4, Eagle Schematics kann man DL.
@Sven. Wie läufst denn so mit der 2 Layer-CAN Version?
Die ist fertig, ich warte immernoch auf die Boards. JA nettes Board für 150$ (... Das board ist aber 4-Layer ;) ) , das ist ja genau mein Ziel, welches ich jetzt glaub ich auch erreicht habe.
Schaut echt fein aus :D Gibts eine Preisprognose ? Kai O. schrieb: > ... die eierlegende Wollmichsau. Ich würde es so machen, das es für DICH > passt. Wofür CAN, I2C und PPM? Solche Universalboards gibts doch schon > (z.B. http://paparazzi.enac.fr/wiki/Main_Page). Schau dir mal dei Preise an, das LisaM v2 kostet 250$, wenn man bei dem Board auf <=100€ kommt wäre das schon um einiges interessanter :)
Ich source gerade Bauteile für ein neues LIA Board, wahlweise mit STM32Fx wobei derzeit nur F1 und F4 geplant sind. Optional mit Linux Add-on oder GPS wie auch blank. Servos werden mittels eines Cortex M0 bereitgestellt 5V, damit LiFe4 Servos auch problemlos gehen. Preis ca 100€ mit Linux, 105€ mit GPS, und ca 75€ reines Board, Smd Bestückt. Preis excl. Mwst. 10€ Aufpreis für devel Version, sprich mit größerem Flash Speicher sowie extra debug leds.
Chris schrieb: > Preis ca 100€ mit Linux, 105€ mit > GPS, > und ca 75€ reines Board, Smd Bestückt. Preis excl. Mwst. 10€ Aufpreis > für + 125$ für Aspirin IMU v2.2 :S, aber ansonsen ganz nice :)
Ne, es gibt kein Aspirin Add-on, die 10DOF wird gleich drauf sein und Mitbestückt und das LIA Board ist größer weil da noch ein Linux Modul draufpassen muss.
chris schrieb: > Ne, es gibt kein Aspirin Add-on, die 10DOF wird gleich drauf sein und > Mitbestückt und das LIA Board ist größer weil da noch ein Linux Modul > draufpassen muss. Ich würd einen stm32f4 wählen, damit treibst du auch die entwicklung vom luftboot bootloader etwas weiter.
Naja ich denke der wahre Benefit beim kauf meines Boards wäre das integrierte Kalman Filter für Höhe und Kurslage. Das ist nicht irgendein pille palle Wikipedia Algorithmus sondern schon etwas, was auch in der Industrie seinen Einsatz findet. Hierzu wird nicht mal das Magnetometer für eine sehr gute Genauigkeit benötigt.
Wie weit ist die 2 Layer Version?
Alles fertig, ich warte immer noch auf die Bestückte Platine. Ich hab das Layout aber nun so verkleinert, das dass Preis / Größen Verhältnis bei 4-Lagen auch in ordnung wäre. Ich bin mal ab Sonntag 3 wochen im urlaub. Wenns doof läuft bekomm ich die Platinen erst nächste Woche wo ich dann nicht da bin.
Ok, Danke Mal hoffen das sie noch vorher ankommen.
Hallo Gibts schon ein Update ?
Hi, wirklich schönes Projekt. Hast Du auch mal an Ethernet gedacht?
Hi, sorry das ich mich mal wieder melde ich hab das Konzept natürlich komplett Überarbeitet... da jeder alles will gibts jetzt Module! Das Basisboard ist so klein wie möglich gehalten, hat die Sensoren und CAN + Kalibrierung (von nem Kalibrationsdienstleister) was die Genauigkeit nochmal um 30% erhöht! Es gibt ein Bluetooth Modul, Ethernet Modul, RFM22 Modul, Wifi Modul, Point Precision GPS Modul für 50cm GPS Genauigkeit, Das Board mit GPS und CAN mit Firmware gibts für 150€ (das ging jetzt nur da der Händler mit 100 Stück abgenommen hat) Ich hab noch eine IMU / INS Version mit Profibus gemacht aber die kostet 400€ und ich glaub ich uninteressant für euch. Bald gibts Bilder und nen Link zum kaufen.
@Sven: Kannst du etwas mehr über "Point Precision GPS Modul für 50cm GPS Genauigkeit" schreiben? Welches Modul wird hier benutzt? Braucht das Teil dann irgendeine Verbindung zum Internet, damit 50cm GPS Genauigkeit möglich wird? Ist dies dann DGPS oder was anderes?
Hi Ingo, es geht um RTK (Real Time Kinematics) ... das ist im vergleich zu DGPS nicht so genau ... DGPS kann ja mit entsprechenden Referenzsignalen bis zu 1mm (kostet aber auch hunderttausende). Es ist ein ublox ppp modul: http://www.u-blox.com/de/precise-point-positioning-ppp.html
Bitte melde dich an um einen Beitrag zu schreiben. Anmeldung ist kostenlos und dauert nur eine Minute.
Bestehender Account
Schon ein Account bei Google/GoogleMail? Keine Anmeldung erforderlich!
Mit Google-Account einloggen
Mit Google-Account einloggen
Noch kein Account? Hier anmelden.