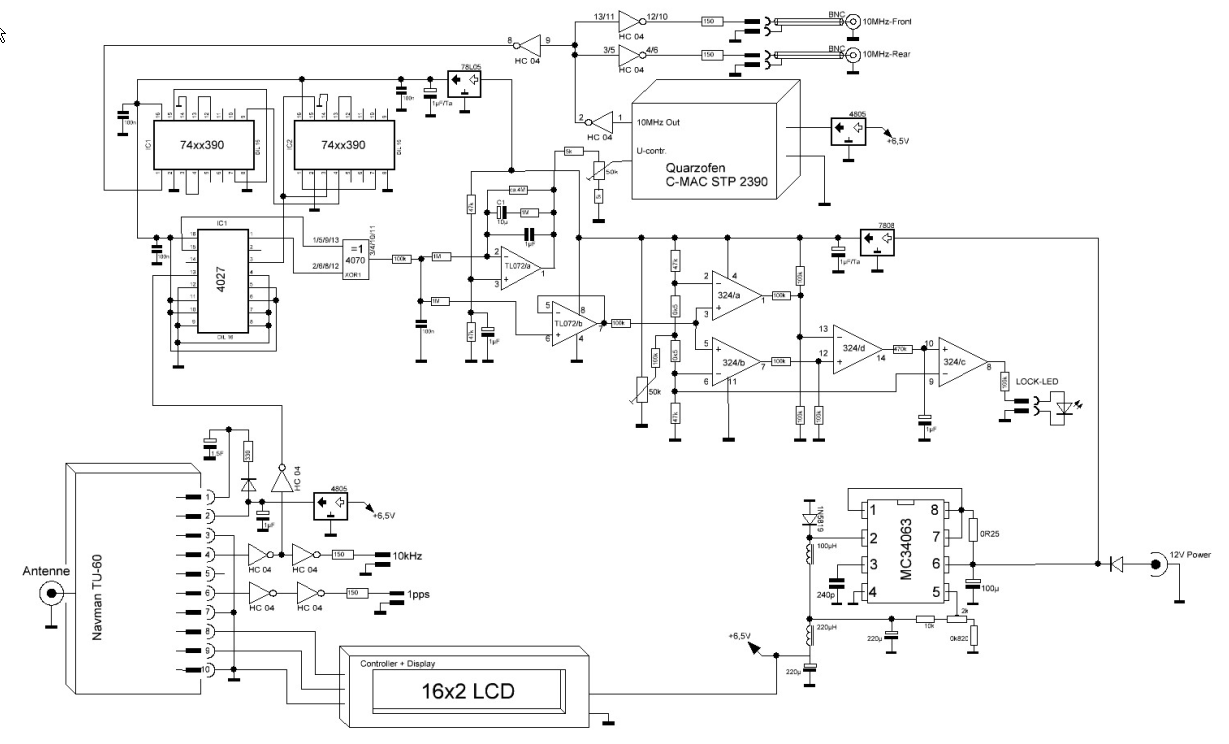
Hallo, die Schaltung dient dazu, einen OCXO mit GPS zu disziplinieren. Ich glaube, soweit habe ich es verstanden: Die 10 kHz aus dem GPS Empfänger werden durch den 4027 in der Frequenz halbiert (um ein 50% Puls-Pausen-Verhältnis zu bekommen?) Das 10 MHZ Signal vom OCXO wird auch auf 5 kHz geteilt und dann mit dem 4070 XOR verglichen. Sollte es eine Frequenzabweichung geben und damit eine Phasenverschiebung, dann funktioniert der XOR als Frequenzverdoppler und es wird ein 10 kHz Signal auf den TL72 OP gegeben, welcher als Integrierer geschaltet ist und die Regelspannung des OCXO erzeugt. Wie aber wird die Regelspannung in beide Richtungen erzeugt? Die Schaltung erkennt doch gar nicht, ob die Frequenz vom OCXO zu hoch, oder zu niedrig ist? Oder doch ? Gruß Thomas
Angehängte Dateien:
-

Gps.png
92 KB