Hallo! Ich betreibe einen Schrittmotor (1.33A/Phase max. Strom, 4.2mH/Phase, 0.9°Vollschritte, 0.22Nm Haltemoment) mit einem DRV8711 Schrittmotortreiber im 256 Mikroschritt-Betrieb. Die hohe Anzahl an Mikorschritten ist deshalb notwendig, da der Schrittmotor sehr fein und vor allem gleichmäßig bewegt werden muss. Bei den Vollschrittpositionen vom Rotor kommt es jedoch zu einem Ruckeln (hervorgewrufen durch das Rastmoment vom Motor) vom Motor. Wie könnte ich dieses Rastmoment kompensieren, sodass eine gleichmäßigere Bewegung möglich ist. Danke schon im Voraus für Eure Vorschläge und Ideen. LG Michael
Hallo Michael! Du müsstest abhängig von der aktuellen Mikroschritt-Position den Stromsollwert anpassen. Das führt natürlich den Einsatz eines so hoch integrierten ICs etwas ad absurdum. Ich frage mich aber, warum du für einen so kleinen Motor überhaupt ein IC mit externen FETs verwendest, und nichts voll integriertes? Das wäre doch einfacher und billiger. Z.B. den A3979 oder ein entsprechendes Pendant von TI. Ich würde erstmal messen, was der Motor wirklich macht, angefangen bei den Phasenströmen. Neben dem was am Shunt abfällt wäre auch eine Messung über eine Strommesszange oder Hallsensoren interessant, um den echten Strom in der Wicklung zu sehen. Ich habe schon mit Treibern zu tun gehabt, die Fehler im Mikroschritt-Muster hatten. Das führt dann zu solchen Rucklern. Es kann aber auch sein, dass dein Design schlecht ist, und deswegen der Strom in den Nulldurchgängen nicht schnell genug abgebaut werden kann. Vielleicht ist also nur der Decay-Mode für den Motor nicht gut eingestellt. Wenn beim Strom alles unauffällig sein sollte, muss man sich mal die Bewegung des Rotors mit einem hochauflösenden Geber ansehen. Ich bin gerade dabei, meinen Testaufbau aus [1] auf einen Geber mit höherer Auflösung umzubauen, um solche Messungen auch für Mikroschritt machen zu können. Mit freundlichen Grüßen Thorsten Ostermann [1] http://www.schrittmotor-blog.de/einschwingverhalten-von-schrittmotoren/
K"onnte man diese Rest-Rastmoment dadurch minimieren, dass man den Strom an den Motor leicht anpasst? Also etwas h"oher oder etwas niedriger ansetzt. Vielleicht l"auft er dann runder. Tendenziell w"urde ich vermuten, dass der Maximalstrom die beste Gleichf"ormigkeit erzeugt. Ausserdem kommt bei einigen ICs das Problem dazu, dass die in der N"ahe eines Nulldurchgangs gar nicht gescheit regeln k"onnen (kleiner Rsense, kleiner Strom => ungenau), aber es kommt eben gerade auf den Strom am Nulldurchgang an, wenn man 1/256 Schrittchen haben will. Vermutlich sind das alle Treiber mit Stromerfassung. Ich denke du f"ahrst besser, wenn du einen vollkommen ungeregelten Treiber verwendest, der stattdessen einen genauen Sinus hinbekommt. Also einen Frequenzumrichter f"ur Schrittmotoren sozusagen. Zumindest ist das meine Erfahrung bisher. Und wenn Du das mit einem uC machst, ist der Weg zu einer Nicht-Sinus-Kurve (angepasst an den Motor) ein sehr kleiner. Und: ich habe schon Schrittmotoren (aus alten Druckern) gehabt, die wollten partout gar nicht mit Mikroschritt funktionieren. Der Motor will schon auf Mikroschritt optimiert sein, oder sollte ich mich da irren?
Angehängte Dateien:
-

Motorstrom.jpg
150 KB -

zero_crossing.jpg
180 KB
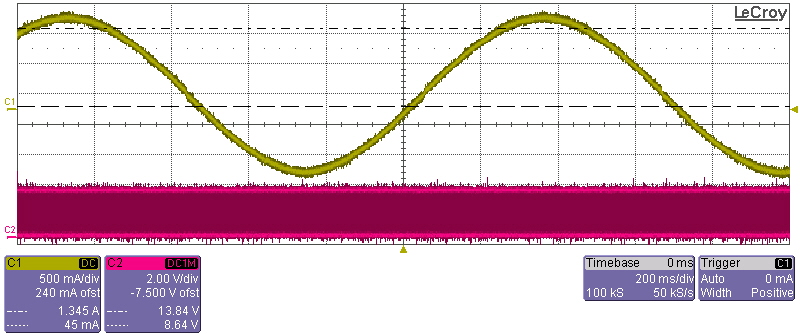
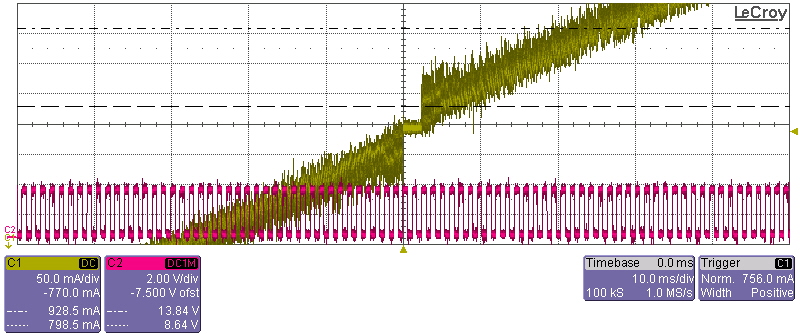
AD Thorsten: Ich verwende den DRV8711, weil ich eine sehr feine Winkelauflösung brauche und der DRV8711 einer von zwei Treibern war, der einen Mikroschrittbetrieb von 256 Mikroschritten erlaubt. Ich habe mir den Strom durch die Motorwicklungen bereits mit Hilfe einer Strommesszange angesehen. Abbildung im Anhang. Auch im Anhang ein Zoom vom Nulldurchgang. Doch der Nulldurchgang scheint mir nicht das Problem zu sein, da beim erreichen eines Vollschrittes nicht zwingend der Strom durch eine der beiden Motorwicklungen Null sein muss - oder verstehe ich da etwas falsch. Das Ruckeln tritt immer nach 256 Mikroschritten, also beim errecihen eines Vollschrittes auf. MfG Michael
> Der Motor will schon auf Mikroschritt optimiert sein, oder sollte ich mich > da irren? Der Schrittmotor muß schon für den Microschrittbetieb gebaut sein um die Genauigkeit zu erreichen. Funktionieren tut der auch so. Also Motore für den 256 fach Microschrittbetrieb kosten GELD. So. ca 300-500€ pro Motor sollte man schon rechnen.
Da möchte ich doch noch mal nachfragen. Du machst z.B einen Mikroschritt pro Sekunde. Nach 255 Mikroschritten ist noch alles OK. Beim nächsten Schritt macht er einen Sprung? Hätte eher erwartet, dass sich bei den 10-20 ersten und letzten Schritten nichts tut. Sobald der Strom höher als das Haltemoment wird, macht er einen Sprung.
Hallo Uwe! >> Der Motor will schon auf Mikroschritt optimiert sein, oder sollte ich mich >> da irren? > > Der Schrittmotor muß schon für den Microschrittbetieb gebaut sein um die > Genauigkeit zu erreichen. Funktionieren tut der auch so. > Also Motore für den 256 fach Microschrittbetrieb kosten GELD. So. ca > 300-500€ pro Motor sollte man schon rechnen. Das halte ich für maßlos übertrieben. Richtig ist allerdings, dass ein "billiger Heuler" aus China meist ein höheres Rastmoment und größere Winkelfehler ausweist als ein japanisches Qualitätsprodukt. Mit freundlichen Grüßen Thorsten Ostermann
Wenn der Sprung wirklich nach jedem Vollschritt auftritt (also 200* pro mechanischer Umdrehung), könnte das Rastmoment des Motors schuld sein. Dann müsste man das Bestromungsmuster anpassen, um das Rastmoment auszugleichen. Dafür wäre es natürlich hilfreich, vom Hersteller Angaben über die Größenordnung des Rastmoments zu bekommen. Üblich sind Werte um die 4-5% vom Nennmoment. Und damit ist sofort klar, das man bei so feinen Schrittteilungen Probleme bekommen kann. Im 1/16-Schritt tritt das Problem vermutlich nicht auf? Mit freundlichen Grüßen Thorsten Ostermann
Mit der Motorspannung bist Du aber arg vorsichtig!? Etwa 4V Hub der Ausgangsstufe wenn ich die Bilder richtig interpretiere. Michael schrieb: > zu sein, da beim erreichen eines Vollschrittes nicht zwingend der Strom > durch eine der beiden Motorwicklungen Null sein muss - oder verstehe ich Die Schrittmotorstr"ome kann man sich einfach als Sinus und Cosinus vorstellen. Und nach einem Vollschritt - DOCH - da ist der eine oder der andere Null. Es sei denn, man addiert einfach eine Konstante > 2*Amplitude drauf, dann nicht ;-) Hast Du mal versucht 'richtige' Sinus/Cosinus-Spannungen- oder Str"ome anzuwenden und geschaut, ob's immer noch ruckelt. Fr"uher gab's mal Menschen die sowas mit 'ner Soundkarte und z.B. zwei TDA2030 hinbekommen haben. Oder gleich mit der Stereoanlage?? Ganz ehrlich, dein Problem kommt mir eher wie ein Software-Ansteuerungsproblem vor
Du hast scheinbar noch nie mit Schrittmotoren gearbeitet, sonst würdest du nicht so einen Unsinn von dir geben. Mit einer Soundkarte steuert man jedenfalls keinen Schrittmotor an, und das Problem mit dem Rastmoment erledigt sich damit auch nicht. Im Übrigen ist die Spannung im Nulldurchgang hier Null. Da habe ich schon ganz andere Sachen gesehen. Mit freundlichen Grüßen Thorsten Ostermann
300-500€ ... klingt eher nach Brushless Servo Motor mit Drehwinkelgeber und Steuerung.
Thorsten Ostermann schrieb: > Du hast scheinbar noch nie mit Schrittmotoren gearbeitet, sonst würdest > du nicht so einen Unsinn von dir geben. Mit einer Soundkarte steuert man > jedenfalls keinen Schrittmotor an, und das Problem mit dem Rastmoment > erledigt sich damit auch nicht. Dann erzähl doch mal, wie sich der Sinus aus einer Soundkarte von einem durch eine Treppenfunktion approximierten Sinus aus einem 256-Stufen Mikroschritttreiber unterscheidet. Spielst du darauf an, dass bei der Soundkarte nicht der Strom, sondern die Spannung gesteuert wird? Ich kann mir kaum vorstellen, dass das bei den 4Vss, die der TO anscheinend verwendet, den großen Unterschied machen.
Es geht zum einen um die Leistung, die benötigt wird. Die Soundkarte wird kaum 10-50 Watt zur Verfügung stellen. Da müsste man schon einen Audio-Verstärker dazwischen hängen. Der Wirkungsgrad wäre unterirdisch. Die oben gezeigte Spannung stellt sich über den vorgegebenen Sollstrom automatisch ein. Die Versorgungsspannung der Brücke wird deutlich höher liegen. Lies dich erstmal in das Thema ein. Stichworte sind H-Brücke, PWM, Stromregelung. Mit freundlichen Grüßen Thorsten Ostermann
In dem gezoomten Bereich sehen wir doch, dass der Motorstrom am Nulldurchgang heftig unstetig ist und zwar mal locker 50mA von 1500mA Vollaussteuerung. 50/1500 ist bei mir ganz ordentlich, wenn einer 1/256 Schritt machen will. Liegt ziemlich in der Gr"ossenordnung, nicht wahr? sin(90/256)*1500mA = (bitte selber rechnen). Darum der Vorschlag mit dem NF-Verst"arker...
Da kann man Motor-strom und -spannung nicht durcheinander werfen. Bei höheren Drehzahlen braucht ein Schrittmotor für den selben Strom eine höhere Spannung. Ist halt eine Spule, kein ohmscher Widerstand.
Kein Name schrieb: > Da kann man Motor-strom und -spannung nicht durcheinander werfen. Bei > höheren Drehzahlen braucht ein Schrittmotor für den selben Strom eine > höhere Spannung. Ist halt eine Spule, kein ohmscher Widerstand. Doch kann man definitiv, wenn die Drehzahl so niedrig ist, dass er ein 1/256 von einer 1/200 Umdrehung zu sehen glaubt.
Leute ich muss lachen! Schaut euch mal diese Negativbewertungen an. Lustig nicht? Tut mir leid, wenn ich versucht habe das Problem zu analysieren und es gewagt habe die Messung des Fragenden mit der Beobachtung in Einklang zu bringen. Daher als Wiedergutmachung: Der DRV8711 ist die beste Wahl (nimm bloss keinen L6470!!), der Sense-Widerstand ist sicher perfekt gew"ahlt, genauso wie der Motor, und das Problem resultiert vermutlich nur aus der aktuellen Wetterlage, die den Selbstreifeprozess der Schaltung behindert. Abwarten und gut is! Ausserdem m"ochte ich mich entschuldigen, dass ich absolut keine Ahnung habe - es stand nirgendwo im Forum zu lesen dass ich dann nicht trotzdem meine Meinung lauthals verbreiten darf!? Bewertung -7 (gar nicht lesenswert:)
Bitte melde dich an um einen Beitrag zu schreiben. Anmeldung ist kostenlos und dauert nur eine Minute.
Bestehender Account
Schon ein Account bei Google/GoogleMail? Keine Anmeldung erforderlich!
Mit Google-Account einloggen
Mit Google-Account einloggen
Noch kein Account? Hier anmelden.