Hallo! Ich soll einen Temperaturregler implementieren, hab aber noch nie einen Regler implementiert. Deswegen bitte ich euch um Hilfe... Es geht um einen Temperaturregler (Kühlung). Es soll eine Metallkammer mit Peltierelementen gekühlt werden. Die Peltiers kann ich mit einem DutyCycle vom µC aus ansteuern (es wird die Spannung an den Peltiers dadurch eingestellt), die Temperatur in der Kammer wird mit Temperatursensoren gemessen. Die Temperatur soll auf 6 +/- 1°C gehalten werden. Ohne Regelung funktioniert das Ganze schon gut, wenn ich einen fixen Wert als DutyCycle (Spannung an Peltiers) einstelle und das System laufen lasse, bekomme ich nach einer gewissen Zeit die gewünschte Temperatur (die andere Seite der Peltiers wird mit Kühlkörpern und Lüftern gekühlt, die würde ich zunächste mal auf einen fixen Wert einstellen, das wird später dann ein eigener Regelkreis mit der TEmperatur am Kühlkörper)... Auch die Temperaturmessung funktioniert ganz gut (Kann die Temperatur in der Kammer auf +/- 0,5°C genau messen. Die ganze Peripherie funtkioniert also, es muss nur der Regler implementiert werden. Was dazu noch zu sagen ist, ist, dass das System sehr träge ist (wie vermutlich immer wenn die Temperatur geregelt werden soll). Wenn ich mit der vollen Leistung fahre, dauert es um die 2 Stunden, bis ich auf 6°C bin. Was ich also habe ist: Temperaturwert in°C (float) oder entsprechenden ADC Wert) und ich kann über einen Wert (0-100% bzw entsprechender Digitalwert in Registern) die Spannung am Peltier einstellen. Der Temperaturwert wird über den ADC Wert eingelesen (Spannungsteiler mit NTC) und in die Temperatur in °C umgerechnet. Alle 100ms wird automatisch eine AD Wandlung durchgeführt und damit die Temperatur gemessen (es wird eine ISR alle 100ms aufgerufen und der ADC-Wert eingelesen). Hier würde ich dann auch jedesmal den Regler aufrufen... Welchen Reglertyp würdet ihr hier prinzipiell auswählen? Ich dachte an PI ohne D anteil, was sagt ihr dazu? LG
Werner13 schrieb: > Welchen Reglertyp würdet ihr hier prinzipiell auswählen? Ich persönlich? Bei +-1° erlaubter Abweichung: 2 Punkt Regler
1 | wenn zu warm |
2 | Peltier ein |
3 | else |
4 | Peltier aus |
Beim Regler hat man die Wahl. Je mehr Parameter, desto schwieriger wird die Einstellung, aber desto genau kann es auch werden. Wenn keine so starken Störungen da sind kann PI reichen, wenn es schneller werden soll dann eher PID. Beim PID hat man halt mehr Parameter passend zu wählen. Ein Tip noch: Die Kühlleistung der Peltierelemente ist nichtlinear vom Strom abhängig. Irgendwo bei etwa dem maximal erlaubten Strom ist die Kühlleistung maximal - darunter ist die Kurve in ganz guter Näherung eine Parabel. Je nachdem wie gut die Kühlung auf der heißen Seite ist, verschiebt sich ggf. das Optimum noch etwas zu kleineren Strömen. Für die Regelung lohnt es sich da die Kurve wenigstens näherungsweise zu linearisieren: also den Regler die Kühlleistung berechnen lassen, und dann anhand er Parabel den passenden Strom zu berechnen. Eine AD-Wandlung alle 100 ms ist ggf. empfindlich auf Störungen durch die Netzfrequenz. Besser wären jeweils 4 Wandlungen mit 5 ms Abstand: Damit hätte man eine ganz brauchbare Unterdrückung von 50 Hz und 100 Hz Störungen. Vor allem mit Differential Anteil sollte die Messung nicht zu viel Rauschen und Störungen drin haben, auch wenn es nicht so dramatisch ist wie es auf den ersten Blick aussieht.
Ulrich schrieb: > Beim Regler hat man die Wahl. Je mehr Parameter, desto schwieriger wird > die Einstellung, aber desto genau kann es auch werden. Wenn keine so > starken Störungen da sind kann PI reichen, Bei 'den' Zeitkonstanten? Da ist der INtegralanteil sowieso dauernd in der Sättigung.
Werner13 schrieb: > Die Peltiers kann ich mit einem > DutyCycle vom µC aus ansteuern (es wird die Spannung an den Peltiers > dadurch eingestellt) Wieso eigentlich PWM. In den PWM Pausen diffundiert die im aktiven Teil des Pulses mühsam auf die eine Seite transportierte Leistung sofort wieder zurück, d.h. sie pendelt hin und her, ohne eine richtige Chance zu haben, den Kühlkörper zu erreichen oder gar an die Umgebung abgeführt zu werden. IMHO wäre eine Stromquelle, z.B. ein Schaltregler mit einer Induktivität als Zwischenspeicher deutlich effektiver.
Angehängte Dateien:
-

Temperaturmessung.png
3,2 KB
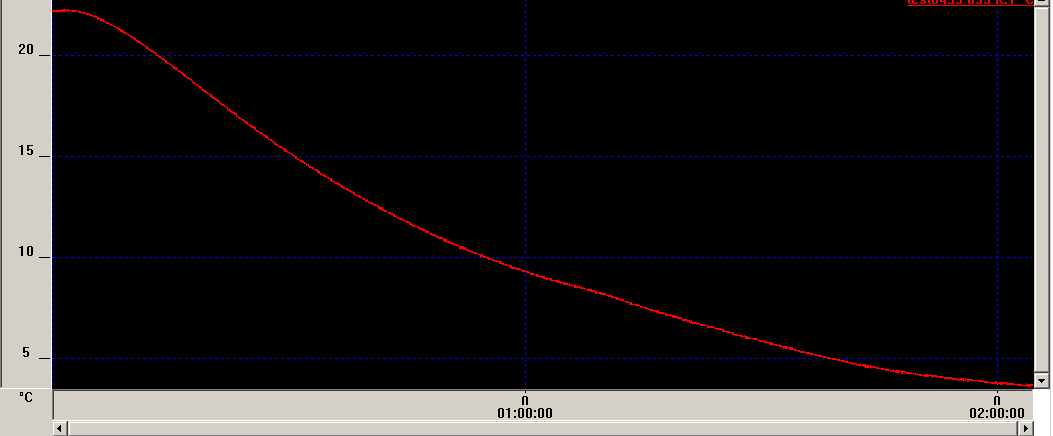
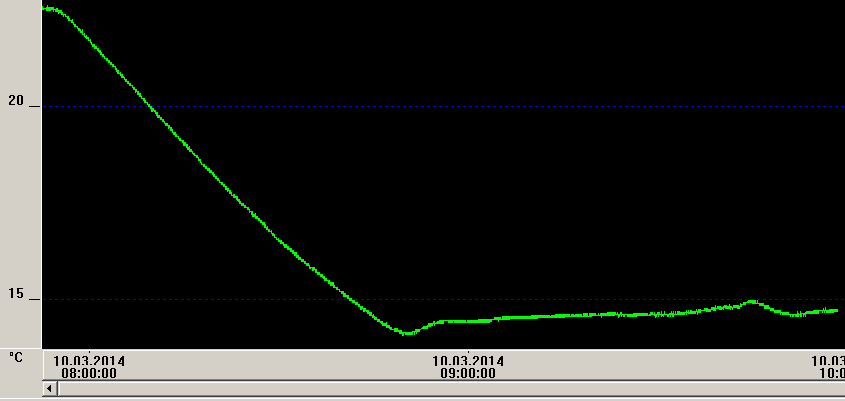
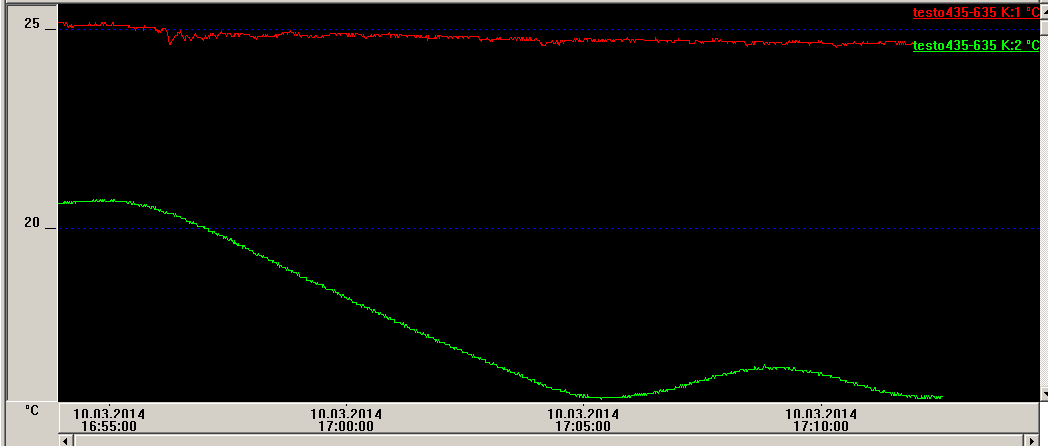
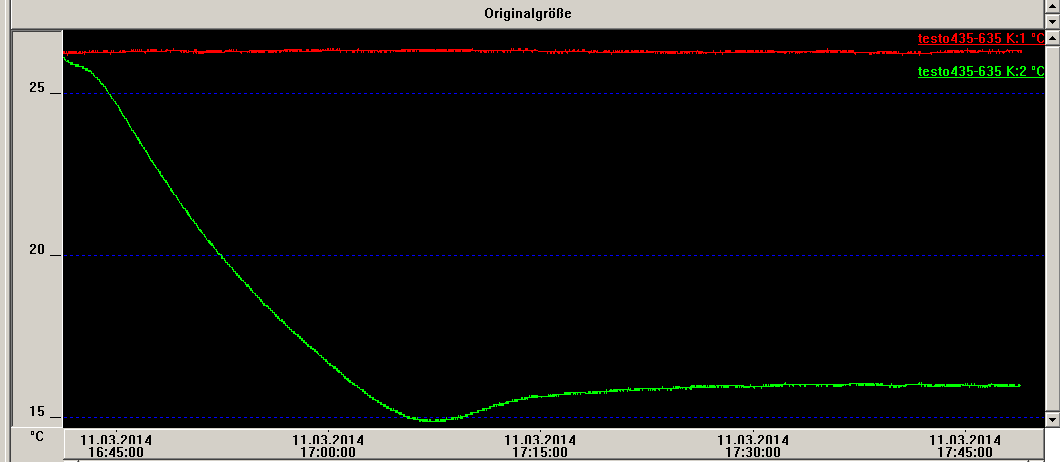
Hallo, das mit dem Zweipunktregler hatte ich mir auch schon überlegt, da ich das regelmodul jedoch öfter brauche, wollte ich gleich einen passenden regler implementieren. Ich denke, ich werde fürs erste einen PI-Regler implementieren... Zur Zeit mach ich alle 100ms eine Wandlung und berechne daraus direkt die Temperatur. Deinen Tip werde ich annehmen, ev. alle 5ms wandeln und aus 4 wandlungsergebnissen den mittelwert wählen. Erst wenn diese 4 Werte vorhanden sind aus dem mittelwert die Temperatur berechnen und mit diesem Wert den regler aufrufen. Aber ist das nicht eine viel zu schnelle abtastung für so ein träges system? Anbei ein Diagramm das ich aufgenommen habe: Hier hab ich einfach fast die volle Leistung ans Peltier geschalten und die Temperatur mitgemessen (auf der X-Achse sieht man die Zeit, 2h). Kann ich nun daraus die Regelparameter bestimmen? LG
Wenn man 4 Werte Mittelt um dann damit eine Temperatur zu bestimmen macht man die Abtastung nicht schneller. Der Regler sieht weiterhin nur einen neuen Wert alle 100 ms. Je nach System sind die 100ms ggf. noch recht schnell - für einen PI Regler ist eine schnelle Abtastung aber kein Problem. Bei einem PID Regler muss man ggf. die Art wie man die Steigung berechnet an die Abtastrate anpassen - einfach nur die Differenz aus den letzten beiden Werten ist dann ggf. nicht mehr gut. Ob der Integralteil in die Sättigung geht hängt von der Auslegung ab - das ist relativ unabhängig davon wie schnell man Abtastet. Im Idealfall wird der Regler nach dem Einschalten relativ schnell in die Sättigung gehen und maximal Kühlen - erst kurz vor dem Erreichen der Endtemperatur kommt er dann aus der Sättigung und kommt dann nicht mehr dahin. Weil abzusehen ist, das der Regler in die Sättigung kommt, sollte man auch ein Anti Windup drin habe, etwa in der Form, dass der Integralterm nicht mehr erhöht wird, wenn die Kühlleistung bereits maximal ist.
Sieht nach nem PT2 System aus. Da das System echt Träge ist, ist ein hoher P Anteil denkbar. Ich empfehle WinFact... Damit kann man ziemlich genau simulieren wie sich der Regelkreis verhält!
Für da Bestimmen der passenden Regelparameter passt die Kurve im Prinzip schon: interessant ist vor allem der aller erste Teil, vom Anschalten der Kühlung bis zu den ersten etwa 20 Minuten. Das ist die Sprungantwort des System. Wichtig ist dabei auch die Zeitskala nach dem Anschalten. Aus der Sprungantwort lassen sich ganz gut die Parameter bestimmen. Als Beispiel: http://www.rn-wissen.de/index.php/Regelungstechnik#Dimensionierung_nach_Einstellregeln Ein 2. Punkt wäre noch die Linearisierung der Kühlleistung vs. PWM Wert. Das Peltierelement sollte nicht direkt das PWM Signal abbekommen - das ist zum einen nicht so effektiv und zum anderen soll es nicht so gut für die Lebensdauer sein. Die Kurve PWM Wert vs. Kühlleistung zu bekommen ist leider relativ zeitaufwendig: am einfachsten wohl für etwa 4 oder 5 verschiedene PWM Werte die Kurve wie oben aufnehmen (je etwa 1/Stunde sollte reichen) - daraus die maximale Steigung bestimmen und gegen den PWM Wert auftragen. Das sollte eine Parabel geben mit einem Maximum etwa beim maximalen PWM-wert oder ggf. auch etwas darüber.
@ Werner13 (Gast) >regler implementieren. Ich denke, ich werde fürs erste einen PI-Regler >implementieren... Ist schon OK. >Zur Zeit mach ich alle 100ms eine Wandlung und berechne daraus direkt >die Temperatur. Deinen Tip werde ich annehmen, ev. alle 5ms wandeln und >aus 4 wandlungsergebnissen den mittelwert wählen. Man kann es auch übertreiben. Bei einer Zeitkonstante von ~1h reicht eine Abtastfrequenz von 1 Hz locker aus! Und man braucht auch selten eine Float-Zahl, Festkommaarithmetik tut es meistens auch deutlich resourcenschonender. >(auf der X-Achse sieht man die Zeit, 2h). Kann ich nun daraus die >Regelparameter bestimmen? http://de.wikipedia.org/wiki/Regler http://de.wikipedia.org/wiki/Faustformelverfahren_%28Automatisierungstechnik%29
Vielen Dank für die zahlreiche Hilfe! @Michael: Ja stimmt. Ich steuer die Peltiers nicht direkt mit PWM an. Mit der PWM stell ich nur die Spannung an den Peltiers ein, d.h. 0% PWM OV an den Peltiers und 100% PWM 24V an den Peltiers. dazwischen ist eine Stufe mit Treiber und Spulen... @Ulrich: Vielen Dank, ich werde gleich versuchen, die beiden Parameter aus der Sprungantwort zu bestimmen. Was meinst du aber mit der Linearisierung der Kühlleistung vs PWM? das verstehe ich nicht ganz... ich werde mal versuchen die Parameter zu bestimmen und dann einen code zu entwerfen. vielleicht kannst du mir dann diesbezüglich noch mal weiterhelfen. Ulrich schrieb: > Ob der Integralteil in die Sättigung geht hängt von der Auslegung ab - > das ist relativ unabhängig davon wie schnell man Abtastet. Im Idealfall > wird der Regler nach dem Einschalten relativ schnell in die Sättigung > gehen und maximal Kühlen - erst kurz vor dem Erreichen der Endtemperatur > kommt er dann aus der Sättigung und kommt dann nicht mehr dahin. Ich habe mir schon Gedanken gemacht, wie diese erste Phase der Kühlung mit dem regler ausschaun wird und hatte dabei bedenken, dass der maximal zulässige Strom durch die Peltiers durch eine zu hohe Spannung überschritten werden könnte, weil die gewünschte Temperatur nicht gleich erreicht ist und der regler versucht die Spannung immer weiter zu erhöhen. Bedeutet das, dass ich hier eine Grenze einstellen kann, dass ich mir keine Gedanken über eine zu hohe Belastung der peltiers machen muss?? @falk: vielen Dank für den Tipp mit der festkommaarithmetik! das muss ich unbedingt implementieren! LG
>Wenn ich mit der vollen Leistung fahre, dauert es um die 2 Stunden, >bis ich auf 6°C bin. Das sagt genauso viel aus wie wenn, nach 12 Wochen Trockenheit, ein Landwirt sagt: "Schönes Wetter heute". Früher gings dabei um Masse und Wärmeabfuhr "Kühlleistung" - falls es so etwas überhaupt gibt. Wird also ein Raum mit 5 Tonnen Inhalt in dieser Zeit abgekühlt, so ist das ganze recht sportlich. Wird ein Raum mit 10 cm³ und einem Papiertaschentuch, als Inhalt, in dieser Zeit gekühlt, so solltest Du auch nicht mehr einbringen.
Angehängte Dateien:
-

Temperaturmessung.png
4,2 KB
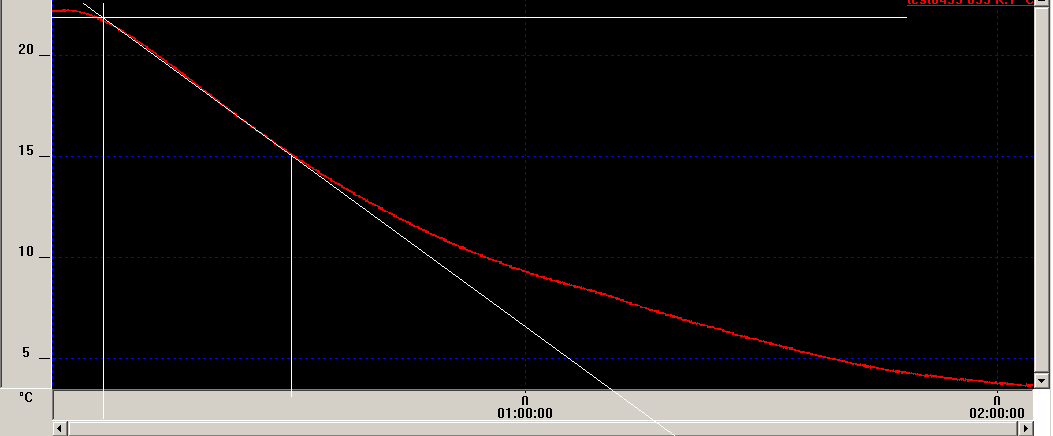
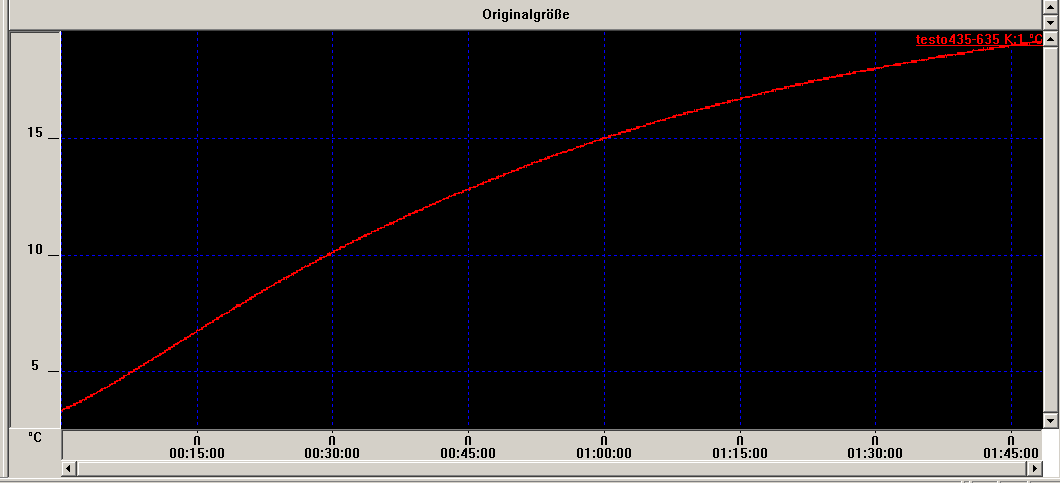
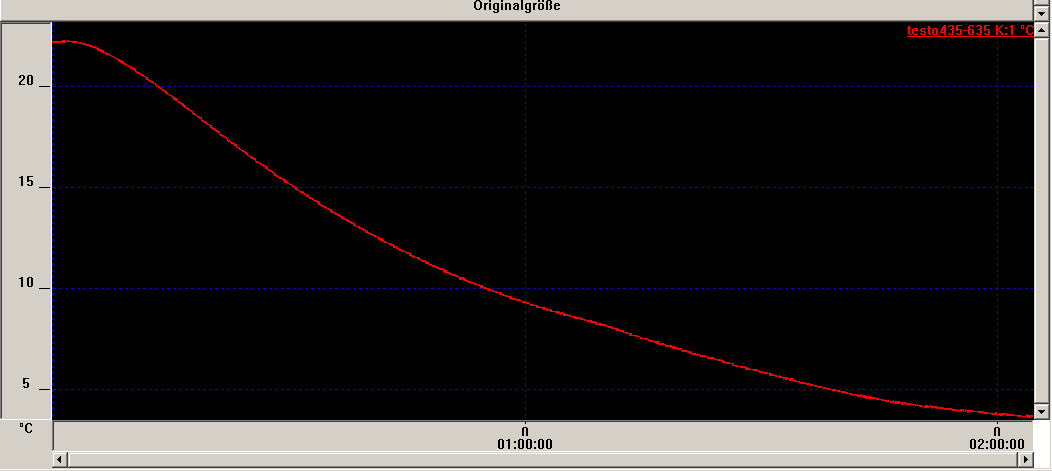
Ich habe nun die Parameter aus der Kurve bestimmt (Skizze siehe Anhang): Tu = 350s Tg = 4300s Ks = -0,011 °C/s Daraus die Parameter (z.B. nach Ziegler/Nichols) berechnen: Kp = 573 s/°C Tn = 1155 s Ki = Kp/Tn = 0,496 1/°C Ich werde die Parameter natürlich noch genauer bestimmen, wichtig ist nur ob die Vorgehensweise stimmt. Ist das so korrekt? Ich nehme an, dass es hier nicht auf eine große Genauigkeit der Parameter ankommt, richtig? Sprich: es ist nicht wirklich entscheidend, ob z.B. Kp nun 570 oder 580 ist. Oder kokmmt es hier wirklich auf sehr genaue werte an? Mit diesen beiden Werten kann ich nun die Reglergleichung aufstellen... Würde mich sehr über eine Rückmeldung freuen :)
Wenn die Steuerung den maximalen Strom des Peltierelements überschreiten kann, sollte man den Strom unbedingt begrenzen. Am besten sogar zusätzliche hardwaremäßig. Ein höherer Strom als etwa 80-95% des Maximalwertes sind auch kontraproduktiv. Ab etwa dem Strom nimmt die Kühlleistung wieder ab. Die Begrenzung legt man eher schon auf den optimalen Strom, auch wenn ggf. etwas mehr zulässig wäre. Wenn man die Kühlleistung als Funktion des Stromes betrachtet, erhält man beim Peltierelement keine Gerade, sondern eine nach unten offene Parabel mit einem Maximum irgendwo knapp unterhalb des maximalen Stromes. Oft wird auch im Datenblatt der Strom für die maximale Kühlleistung bzw. maximale Temperaturdifferenz angegeben. I.A. gilt dies unter der Randbedingung sehr guter Kühlung auf der heißen Seite; mit einer nicht so guten Kühlung verschiebt sich der optimale Strom noch einmal nach unten. Diese nichtlineare Kennlinie des Stellgliedes erschwert die Regelung, weil das System nicht mehr linear ist, wie in der Regelungstheorie vorausgesetzt. Über die Kennlinie lässt sich der nichtlineare Effekt ausgleichen. Der Regler berechnet also die gewünschte Leistung - da ist das System in guter Näherung linear. Der passende PWM Wert kann dann einfach per Formel ausgerechnet werden. Das Problem kennt man so ähnlich von der Heizung mit vorgegebener Spannung - auch das ist nichtlinear (andere Richtung, aber ähnliches Problem).
So super genau müssend die Regelparameter nicht sein - sonst würde kaum ein Regler funktioniere. Man sieht es auch schon daran, dass es mehrere verschiedene Rezepte gibt um aus der Sprungantwort die Regelparameter zu bestimmen. Das sind halt alles Näherungen mit etwas Reserve damit der Regler nicht gleich anfängt zu schwingen. Es gibt im Prinzip einen optimalen Satz Parameter, andere Regler funktionieren auch, sind aber langsamer bzw. zeigen mehr Überschwinger. Das Verhältnis der Ki, Kp und ggf. Kd sollte so etwa (+-25%) stimmten - wenn die Werte insgesamt kleiner werden wird es zunehmend weniger kritisch, der Regler aber auch langsamer. Wenn der PI Regler so zu langsam ist, wird man auch kaum versuchen die Parameter noch etwas zu verbessern, sondern dann auf einen PID-Regler umsteigen.
Grüß Euch! Das Pletier kann maximal 5A, das wird auch hardwaremäßig begrenzt. Aber wie kann ich es softwaremäßig begrenzen? Hab nun einen Regler implementiert, den ich euch kurz präsentieren will: Hab gleich einen allgemeinen PID Regler implementiert, der D-Anteil wird fürs erste, da ich ja nur einen PI will, einfach auf Null gesetzt. Nun wird jede Sekunde der ADC Wert eingelesen und die Temperatur daraus berechnet. Die berechnete Temperatur und die Solltemperatur werden eine Reglerfunktion übergeben. Zusätzlich werden Regelparameter eines Reglers in eine Struktur zusdammengefasst:
1 | typedef struct |
2 | {
|
3 | U16 Ta; // sampling time in s |
4 | U16 Kp; // P part |
5 | float Ki; // I part |
6 | U16 Kd; // D part |
7 | float offset; // control deviation |
8 | float offset_sum; // sum of offsets |
9 | float old_offset; // offset of the last sampling |
10 | U8 duty_cycle; // controlled variable |
11 | U8 trigger_threshold; // within this value around the nominal value nothing happens |
12 | }st_PID_settings; |
13 | |
14 | st_PID_settings ControlTec0 = { |
15 | .Ta = 5, |
16 | .Kp = 573, |
17 | .Ki = 0.5, |
18 | .Kd = 0, |
19 | .offset = 0.0, |
20 | .offset_sum = 0.0, |
21 | .old_offset = 0.0, |
22 | .duty_cycle = 0, |
23 | .trigger_threshold = 1, |
24 | };
|
Ich rechne hier alles in den Einheiten Sekunde und °C. Die Werte für Kp und Ki wurden wie oben angeführt aus der Sprungantwort berechnet. Kann das ungefähr hinkommen? Wird die Temperatur nun jede sekunde berechnet, wird folgedne Reglerfunktion aufgerufen:
1 | U8 PID_control(float actual_value, float nominal_value, st_PID_settings* PID) // actual value: Istwert; nominal_value: Sollwert |
2 | {
|
3 | PID -> offset = nominal_value - actual_value; // calculate control error |
4 | |
5 | if ((PID->offset > PID->trigger_threshold) || (PID->offset < (PID->trigger_threshold * (-1)))) // trigger threshold exceeded? |
6 | {
|
7 | |
8 | if((PID->duty_cycle > 0) && (PID->duty_cycle < 60)) // anti windup: freeze integration in case of overdriven actuator |
9 | {
|
10 | PID->offset_sum += PID->offset; // update sum of control errors |
11 | }
|
12 | |
13 | PID->duty_cycle = (PID->Kp * PID->offset) + (PID->Ki * PID->Ta * PID->offset_sum) + (PID->Kd * (PID->offset - PID->old_offset) / PID->Ta); // control equation |
14 | |
15 | PID->old_offset = PID->offset; |
16 | }
|
17 | |
18 | if(PID->duty_cycle > 60) |
19 | {
|
20 | PID->duty_cycle = 60; |
21 | }
|
22 | if(PID->duty_cycle < 1) |
23 | {
|
24 | PID->duty_cycle = 0; |
25 | }
|
26 | |
27 | return PID->duty_cycle; |
28 | }
|
Meine Stellgröße ist der duty_cycle in %, mit dem die SPannung am Peltier eingestellt wird (ich will diese vorerst mit 60 begrenzen). Ist dies schon die beschrieben Begrenzung durch software? Ist der regler so richtig implementiert?
Ich versteh das nicht ganz: angenommen, ich hab raumtemperatur wenn ich den regler starte und ich will auf 15°C regeln. Dann ist die differenz aus sollwert - istwert ca. -8 und wenn Kp 573 ist, dann hab ich hier schon einen sehr großen (573* (-8)) Wert (negativ) für meine Stellgröße, den duty cycle. zusätzlich kommt dann noch der I-Anteil dazu... Was ist hier falsch? Kann ich den DutyCycle als Stellgröße verwenden? Liegt der Fehler einfach an einem zu hohen Kp wert?
Werner13 schrieb: > angenommen, ich hab raumtemperatur wenn ich den regler starte und ich > will auf 15°C regeln. Dann ist die differenz aus sollwert - istwert ca. > -8 und wenn Kp 573 ist, dann hab ich hier schon einen sehr großen (573* > (-8)) Wert (negativ) für meine Stellgröße, den duty cycle. Dann hast du dein Kp falsch rum bestimmt. Das sollte dann negativ sein. Irgendwo muss da ein Vorzeichenwechsel rein. Sieh es so: Je niedriger die Soll-Temperatur desto größer ist der Absolutwert des Fehlers. Da es sich bei dir um eine Kühlung handelt, wirst du dein Element stärker aufdrehen wollen, damit die Temperatur sinkt, wodurch der Fehler kleiner wird. Der übliche betrachtete Normalfall ist ja gerade anders rum. Da ist meistens von zb einer Heizung die Rede. Und da ist es ja so, dass der Istwert größer wird (ist ja die Temperatur), je mehr man den Aktuator (= die Heizung) aufdreht. Bei dir ist es aber gerade anders rum: Die Temperatur wird niedriger, je mehr du deinen Aktuator (= das Peltier Element) aufdreht. Also müssen da ein paar Vorzeichendreher rein, die das berücksichtigen. > Wert (negativ) für meine Stellgröße, den duty cycle. Der wird dann positiv .... > zusätzlich kommt dann noch der I-Anteil dazu... ... und kann logischerweise nicht größer als 100% werden. Selbst wenn dein Regler auf 874% aufdrehen will, mehr als 100% geht nicht (der Regler selbst weiß ja nichts von Prozenten. Der errechnet nur eine Zahl, je größer desto mehr soll das dahinter liegende System arbeiten). Also wirst du das begrenzen. In der anderen Richtung natürlich auch. Weniger als 0% geht nicht. Einen Wert kleiner 0 könnte man als Heizung interpretieren. Wenn der Regeler also haben möchte, dass dein Aktuator mit -20% arbeitet, dann will er in Wirklichkeit heizen. Das kannst du allerdings nicht, also nimmst du statt dessen 0%, was dein Peltier Element effektiv ausschaltet und lässt der Natur ihren Lauf, deinen was_auch_immer wieder zu erwärmen.
Formeln sind zwar ganz schön, aber wiiie sich die thermische Trägheit, der Wärme/Kälteverlust/die Wärmeverteilung zur Masse und Leistung in der wahren Welt verhalten, wird der TS wohl geduldig testen müssen um anschließend die optimale Leistung und die passende Hysterese zu finden. Zu viel Leistung führt zu großen Temperatursprüngen, zu kleine Leistung erfordert viel Geduld bis zum Erreichen der Wunschtemperatur. Von Peltierelementen würde ich allerdings keine Wunder erwarten.
oszi40 schrieb: > Formeln sind zwar ganz schön und vor allen Dingen muss man auch ein bischen verstehen, was die Zahlen die da rauskommen für eine Bedeutung haben. Gerade bei einem PI(D) Regler sollte man da schon ein bischen Gefühl dafür entwickelt haben, was da eigentlich rein geht, wie das ganze arbeitet und was da raus geht. Wer denkt, er braucht da nur die Formel zu implementieren, dann irgend ein Verfahren zur Bestimmung der Parameter nachvollziehen, die ermittelten Werte dann einsetzen und alles ist paletti, der hat mit Zitronen gehandelt. Das hat in der Technik noch nie funktioniert, das man etwas auf eigene Faust baut, von dem man nichts oder nicht viel versteht.
Hmmm, das ist wirklich nicht einfach, wenn man das das erste mal macht... Das würde bedeuten, dass der Kp negativ und der Ki positiv ist, und die wirken dann entgegen, richtig? Wie soll ich denn die Aufsummierung für den I-Anteil begrenzen? Wenn ich nur aufsummiere, wenn der Regler nicht in Sättigung ist (also im gültigen Bereich zwischen dutycycle 0 und 60, siehe code), dann ist der Regler ja dauerend in sättigung...?!
Werner13 schrieb: > Hmmm, das ist wirklich nicht einfach, wenn man das das erste mal > macht... > > Das würde bedeuten, dass der Kp negativ und der Ki positiv ist, und die > wirken dann entgegen, richtig? Die würden dann wohl beide negativ sein. Aber in deinem Fall kannst du auch hergehen und den Fehler genau anders rum berechnen. Wenn die Isttemperatur höher als die Solltemperatur ist, dann hast du eben einen 'positiven' Fehler. Je positiver desto mehr heizen. Denn je höher der positive Fehler, desto mehr versucht der Regler dem entgegenzuwirken indem er die dahinter liegende Maschinerie (bei dir das Peltier Element) aktiviert. Die übliche Berechnung
1 | Fehler = Sollwert - Istwert |
stammt ja nur daher, dass man die Heizung umso mehr aufdrehen möchte, je niedriger die Isttemperatur in Bezug zur Solltemperatur ist. Stellst du die Heizung auf 30° ein und hat es 10° im Raum, dann hast du einen Fehler von 30-10 gleich 20° (positiv!). positiver Fehler heisst: die Heizung muss arbeiten. Bei dir mit der Kühlung ist aber alles genau anders rum. Ist die Solltemperatur 30° und dein Sensor meldet 10°, dann bist du offensichtlich mit der Kühlung schon weit übers Ziel hinausgeschossen. Du musst überhaupt nicht mehr Kühlen. Also bleibt die Kühlung aus. Du könntest also in deinem Fall auch
1 | Fehler = Istwert - Sollwert |
rechnen und dafür Kp und Ki so lassen wie sie sind.
Du hast aber auch noch eine dritte Möglichkeit.
Du interpretierst das, was aus dem Regler rauskommt grundsätzlich als
'Heizung'. Positive Werte bedeuten 'heizen', negative Werte bedeuten
'kühlen'.
Wenn also der Regler ermittelt, dass er die Maschinerie mit 80 ansteuern
will (weil der Istwert kleiner als der Sollwert ist), dann will er
prinzipiell heizen. Ermittelt der Regler, dass er die Maschinerie
dahinter mit -80 ansteuern will (weil der Istwert größer als der
Sollwert ist), dann will er kühlen.
Heizen interessiert dich nicht. Daher ignorierst du positive Ergebnisse.
Was dich interessiert ist kühlen, also der Fall das der Regler eine
negative Zahl ermittelt. Der Regler will mit -80 kühlen, also stellst du
dein Peltier Element auf +80% ein.
> Wie soll ich denn die Aufsummierung für den I-Anteil begrenzen?1 | if( Summe < SummenMaximum && Summe > SummenMinimum ) |
2 | Summe += Fehler |
Für SummenMaximum und SummenMinimum denkst du dir Werte aus, die dir sinnvoll erscheinen. Ziel der Sache ist es, dass die Summe nicht über alle Schranken wachsen kann, so dass der Regler erst mal diese Summe wieder abbauen muss, wenn er übers Ziel hinausschiesst. > gültigen Bereich zwischen dutycycle 0 und 60, siehe code), dann ist der > Regler ja dauerend in sättigung...?! sag ich doch, dass ein einfacher Regler wenn zu warm dann kühlen es auch tun würde. Aber mir glaubt ja keiner was.
Hallo Karl Heinz! Danke für die Hilfe!
1 | if( Summe < SummenMaximum && Summe > SummenMinimum ) |
2 | Summe += Fehler |
das funktioniert so aber nicht,w eil sobald ich einmal über die grenzen hinaus bin kann sich die summe nie mehr ändern! Ja, ich werde soll- und istwert vertauschen, erscheint mir auch sinnvoll! dann bleiben die beiden Werte Kp und Ki so wie ich sie berechnet habe! Könnte vielleicht jemand überprüfen, ob ich bei der Berechnung ungefähr richtig liege oder ob sich hier ein grober Fehler eingebaut hat?! Vielen Dank für eure Hilfe!
Werner13 schrieb: > Hallo Karl Heinz! > Danke für die Hilfe! >
1 | > if( Summe < SummenMaximum && Summe > SummenMinimum ) |
2 | > Summe += Fehler |
3 | >
|
> > das funktioniert so aber nicht,w eil sobald ich einmal über die grenzen > hinaus bin kann sich die summe nie mehr ändern! Ja ok. Dann musst du das eben ein bischen abändern :-)
1 | NeueSumme = Summe + Fehler; |
2 | if( NeueSumme < SummenMaximum && NeueSumme > SummenMinimum ) |
3 | Summe = NeueSumme; |
Sei halt ein wenig kreativ. Das ganze ist hier sowieso mehr 'schwarze Magie', im Fachjargon auch 'Heuristik' genannt. > Könnte vielleicht jemand überprüfen, ob ich bei der Berechnung > ungefähr richtig liege oder ob sich hier ein grober Fehler > eingebaut hat?! Brenns auf den µC, lass es laufen und dein µC wird dir sagen, ob das richtige passiert :-) (wenn du noch eine Ausgabemöglichkeit hast, dann ist es sehr zu empfehlen, sich da ein paar der Kennwerte ausgeben zu lassen, so dass du verfolgen kannst, wie sich die einzelnen Zahlen im Lauf der Zeit entwickeln)
Der Wert von KS ist oben falsch bestimmt worden. Das gibt grob abgelesen aus der Graphik etwa -30 K Temperaturänderung für eine Änderung des PWM Wertes von vermutlich etwa 50 . Das sollte also irgendetwas in der Größenordnung -0,5 °C/pwm-schritt . Entsprechend sind berechneten Ki und Kp deutlich zu groß. Der 2. Punkt ist, dass es sehr wahrscheinlich keinen linearen Zusammenhang zwischen dem PWM Wert und der Kühlleistung gibt. Da müsste man noch den Zusammenhang aus messen / Schätzen und berücksichtigen. Wenn man für den ersten Versuch linear nähern will, müsste man eher die größte Steigung nehmen. Das dürfte bei einem kleinen PWM Wert der Falls ein, vermutlich so das man auf Ks von rund -1 °C/pwm-schritt kommt. Wenn immer nur das eine Ziel angestrebt wird, und entsprechend der PWM Wert meistens in einem engen Bereich bleibt kann man ggf. auch mit der Steigung in dem Bereich besser fahren - da wäre dann Ks vermutlich sogar eher kleiner (vom Betrag). Im Idealfall braucht man halt die richtige Umrechnung von PWM nach Leistung (nicht unbedingt in W, eher relativ zur Leistung bei der Sprungantwort oben) und zurück von der Leistung in den PWM Wert.
Ich glaube, Du machst es ein bisschen zu kompliziert. Ein so träges und noch dazu von den Umgebungsvariablen stabiles System braucht maximal einen PI-Regler, vermutlich recht P auch. Und den ganzen Trubel mit Linearisierung etc. kann man sich HIER wirklich sparen, es soll ja kein superschneller Präzisionsregler werden. Du ermittelst einfach die ADC-Werte, die 5, 6 und 7° entsprechen, und setzt diese direkt (ohne Umrechnung in °C) in den Regler ein: 6°C-Wert ist "soll", aus 5°- und 7°-Wert bestimmst Du P Daher ist Karl-Heinz's Vorschlag (04.03.2014 18:06) schonmal ganz gut: wenn zu warm: Peltier ein else: Peltier aus Das kann man noch verfeinern in Richtung P: PWM = P x (soll - ist); if(PWM< 0)PWM= 0; else if(PWM>100)PWM=100; wobei man P so wählt, dass z.B: bis 7°C PWM=100 und dann linear runtergeht auf 0 bei 5°C. Je nach ermittelten Werten muss man noch kürzen, dabei aufpassen, dass der Wertebereich eingehalten wird. 16bit kann dann leicht ausreichen. Also z.B. PWM = P x (soll - ist) / 16; Auch muss PWM nicht von 0 bis 100 gehen, weil wir Menschen es so gewohnt sind. Bei diesem P-Regler merkt man dann, dass zum Erhalten einer konstanten Temperatur ein PWM von z.B. 40 erforderlich ist. Das kann man dann erweitern um den I-Regler, der diesen Wert automatisch ermittelt. Aber bei konstanten Umgebungsbedingungen reicht es völlig aus, auf I zu verzichten und den Sollwert so zu korrigieren, dass bei 6°C sich ein PWM von 40% ergibt. Einen aufwendigen (PI oder PID)-Regler braucht man nur, wenn - die Umgebungsparameter / Last sich ständig ändern - hohe Konstanz gefordert ist - die Regelstrecke träge ist, d.h. z.B. der Heizkörper thermisch schlecht angekoppelt ist und / oder eine große Masse besitzt. Nebenbei: für einen Hochleistungs-Kühlungsregler ist es sinnvoll, auch heizen zu können (und umgekehrt). Zeitgleicher Parallelthread: Beitrag "Digitale Stromregelung für Peltierelement"
Zur Schonung der PeltierElemente (mechanische Spannungen) kannst Du beim Einschalten eine Rampe hochfahren. Was sie auch nicht mögen: Kondenswasser ADC-Werte filtere (und falls erwünscht erweitere / multipliziere) ich immer so: filter += ADC + filter/16; //PT1-Glied Der Wert filter pendelt sich dann auf das 16-fache von ADC ein, /16 sind für den µC vier einfache Shift-Befehle. Bei einem 10Bit-ADC (0..1023) ergibt sich dann ein Wertebereich von 0 .. 16368. Optimal, um in die Reglerformel eingespeist zu werden. Man kann sogar die "Verstärkung" noch weiter erhöhen, wenn man vorher vom ADC eine Offset (von Werten, die nie erreicht werden können) subtrahiert. z.B. offset ist der ADC-Wert von -10° oder 100°: filter += ADC - offset + filter/128; /ist schon ein starkes Filter
Das System sieht mir schon recht träge aus. Wie gut der Regler sein muss hängt davon ab wie stark und schnell die äußeren Störungen sind. Ein wesentlicher Einfallspunkt für externe Störungen ist eine Veränderung der Temperatur auf der heißen Seite des Peltierelements. Die Schlägt halt fast direkt und ggf. auch recht schnell durch. Die Forderung das die Warme Seite um weniger als 1 K in etwa 1/2 Stunde gestört wird ist schon eine recht heftige Einschränkung, zumindest bei Luftkühlung. So gering sind da die Anforderungen an den Regler gar nicht. Ob man das linearisieren braucht, hängt davon ab wie dicht man an den Optimalen Strom bzw. die maximal mögliche Kühlleistung kommt. Nahe an der tiefsten Temperatur wird die Kurve schon sehr flach. Da ist dann die lineare Näherung nicht mehr wirklich brauchbar. Wo der optimale Strom für das System (incl. nicht perfekter Kühlung auf der heißen Seite) liegt sollte man schon etwa wissen - das braucht man auch schon für eine sinnvolle Begrenzung des Stromes. Wenn man die Größe hat, kann man das auch gleich richtig nutzen. Wenn die Kühlung auf der heißen Seite schlecht ist, wird das ganze ist sogar noch etwas komplizierter: mit einem Sprung im Strom ändert sich dann nämlich auch die Temperatur auf der heißen Seite. Der Effekt hängt dann auch noch anders vom Strom ab als die Kühlwirkung auf der kalten Seite. Es wäre da schon gut zu wissen, wie die Kühlung der heißen Seite aussieht.
@Ulrich: Achso, ich hatte die Steigung der Kurve berechnet (bezogen auf die Zeit), das solte eigentlich wie du sagst auf die Stellgröße bezogen werden... Danke für den Hinweis!!!! Also: ich hatte bei dem Versuch eine DutyCycle von 75% eingestellt. Die Istgröße (Temperatur) ändert sich um 20°C. Das gibt dann einen Ks Wert von 20°C / 0,75 = 26,66 °C/% Richtig? Daraus ergeben sich dann folgende neue Werte für den Regler: Tu = 350s Tg = 4300s Ks = -20°C / 75% = -0,266 °C/% Kp = 0,9/Ks * Tg/Tu = -41,46 %/°C Tn = 3,3 * Tu = 1155s Ki = Kp/Tn = -0,036 %/(s°C) Passt die Berechnung nun so? Ich hab mir den Regler mit den falschen Werten vorher theoretisch durchüberlegt, und das ist mir echt komisch vorgekommen. VBielleicht passts mit diesen Werten nun besser! @All: Danke für die anderen zahlreichen vorschläge, aber ioch will den weg mit dem PI-Regler weitergehn, weil ich das Modul für viele andere Anwendungen auch brauchen werde! Vielen Dank!
Zwecks Kühlung: Es werden 2 Peltiers verwendet. Jedes Peltier hat einen relativ großen (BxLxH = 10x10x30 cm) Aluminiumkühlkörper, der mit Wärmeleitpaste am Peltier angebracht ist. Durch diesen Kühlkörper wird mit einem Ventilator Luft geblasen. Auch auf diesem Kühlkörper messe ich die Temperatur mit, das wird später eine eigene Regelschleife, um die Kühlkölrpertemperatur auf einem entsprechenden Wert zu halten. Vorerst werde ich aber den Kühler konstant laufen lassen und die Regelung der Peltier vornehmen...
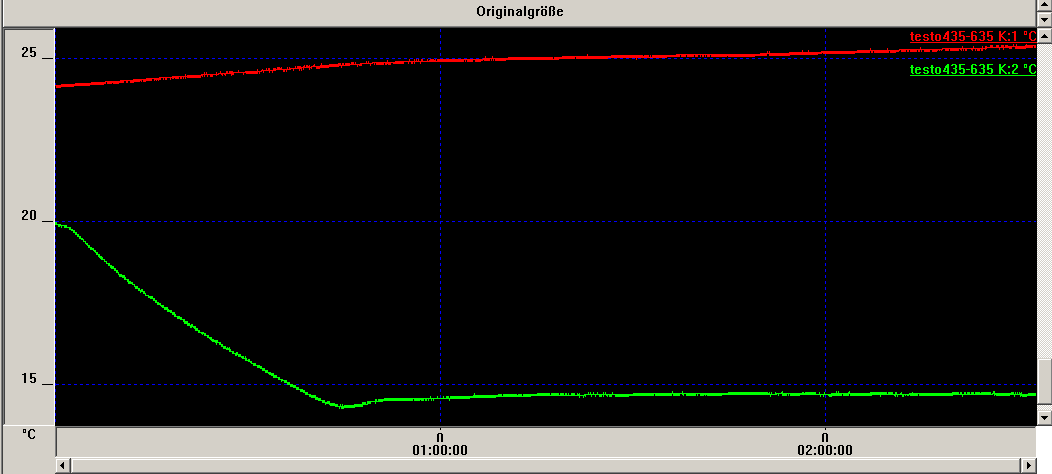
Hallo! Habe nun folgenden Regler implementiert:
1 | S32 controlled_variable = 0; |
2 | S32 Kp = -41; |
3 | double Ki = -0.036; |
4 | double Kd = 0; |
5 | double offset = 0; |
6 | double offset_sum = 0; |
7 | double old_offset = 0; |
8 | |
9 | |
10 | Regler: |
11 | offset = nominal_value - actual_value; |
12 | offset_sum += offset; |
13 | if(offset_sum <=-250) |
14 | {
|
15 | offset_sum = -250; |
16 | }
|
17 | if(offset_sum >=250) |
18 | {
|
19 | offset_sum = 250; |
20 | }
|
21 | |
22 | |
23 | controlled_variable = Kp * offset + Ki * Ta * + Kd * (offset -old_offset) / Ta; |
24 | old_offset = offset; |
25 | |
26 | if(controlled_variable > 70) |
27 | {
|
28 | duty_cycle = 70; |
29 | }
|
30 | if(controlled_variable <= 0) |
31 | {
|
32 | duty_cycle = 0; |
33 | }
|
34 | if((controlled_variable < 70) && (controlled_variable > 0)) |
35 | {
|
36 | duty_cycle = (U8)controlled_variable; |
37 | }
|
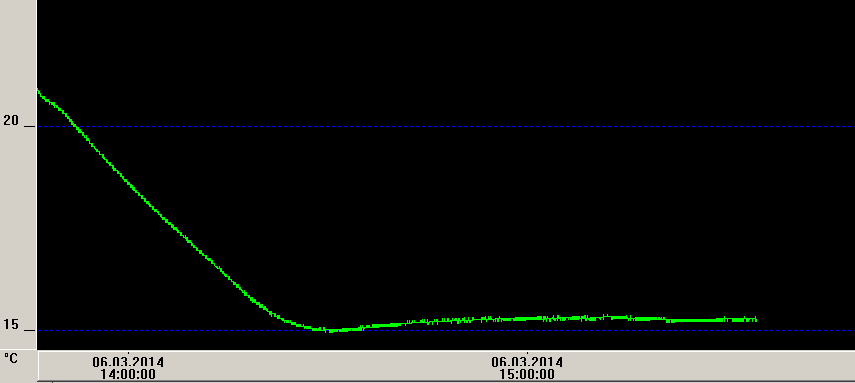
Habe nun den Regler für einen Sollwert von 15.0°C aufgerufen, die Starttemperatur war ca 21°C Im Anhang das Ergebnis... Sieht meiner Meineung nach super aus. Aber: Was mir aufgefallen ist, ist, dass die offset_sum für den I-Anteil immer in Sättigung bleibt! Der Regler regelt die Temperatur auf 15,3°C ein, der kleine Offset ergibt sich durch ungenauigkeiten bei der Temperaturmessung... D.h. der Offset wird eigentlich nie positiv, somit bleibt der offset_sum wert immer wuf -250. Wie ist das zu bewerten? Eigentlich sollte der Wert ja dann um 0 pendeln und im immer kleiner werden, oder?
Angehängte Dateien:
Anhang vergessen...
Werner13 schrieb: > Was mir aufgefallen ist, ist, dass die offset_sum für den I-Anteil immer > in Sättigung bleibt! Das war zu erwarten. Dein System ist so träge, dass sich der Fehler hier
1 | offset = nominal_value - actual_value; |
von einem Reglerdurchlauf zum nächsten überhaupt nicht großartig verändern KANN. Wenn du also einen Fehler von sagen wir mal 1° hast, dann hat sich offsetSum spätestens 500 Durchläufe durch die Reglerschleife später auf 250 hochgeschaukelt und bleibt auch dort. 500 Reglerdurchläufe dauern bei dir wie lange? Wenn die 5ms noch gelten, dann sind das gerade mal 2.5 Sekunden. Und um wieviele Grad kann sich dein Kühlgut in 2.5 Sekunden abkühlen (oder erwärmen)? Dein Peltier arbeitet jetzt volle Pulle und verringert den Fehler. Der Fehler sei dann irgendwann bei -1°. D.h. die Summierung verringert jetzt wieder offset_sum. Aber in welcher Zeit? Aus symetrischen Überlegungen heraus: 2.5 Sekunden später hängt deine offset_sum bei -250. Und wieder: in diesen 2.5 Sekunden hat sich aber die Temperatur des Kühlgutes mit Sicherheit nicht großartig verändert. Dein Regler pendelt also mit dem I-Anteil mehr oder weniger ständig zwischen Minimum und Maximum, weil sich in der Zeit in der offset_sum NICHT an einem Endanschlag hängt, die Temperatur deines Kühlgutes gar nicht soviel verändern kann, dass die Aufsummierung mittendrinn irgendwo stoppen würde. > Temperaturmessung... D.h. der Offset wird eigentlich nie positiv, somit > bleibt der offset_sum wert immer wuf -250. Wie ist das zu bewerten? > Eigentlich sollte der Wert ja dann um 0 pendeln und im immer kleiner > werden, oder? Zerleg das hier
1 | controlled_variable = Kp * offset + Ki * Ta * + Kd * (offset -old_offset) / Ta; |
mal in die Einzelteile
1 | pPart = Kp * offset; |
2 | iPart = Ki * Ta * offset_sum; |
3 | dPart = Kd * (offset -old_offset) / Ta; |
4 | |
5 | controlled_variable = pPart + iPart + dPart; |
und sieh dir die einzelnen Anteile an. PS: Ist das ein Fehler in deinem Code? Sieh dir in der Reglergleichung mal den I-Anteil an. Da fehlt doch ein offset_sum.
Hallo KarlHeinz, ja stimmt, das ist ein Fehler im Code, wollte nur das Prinzip posten, der originalcode enthält strukturen usw, was es zur diskussion unnötig verkompliziert... In Wirklichkeit ist das richtig implementiert! Ok, werde die Anteile mal zerlegen... Aber ist das prinzipiell ein Problem, wenn dieser Anteuil in Sättigung bleibt? Ich meine, der regler funktioniert seht gut, weas würde sich ändern, wenn dieser Anteil nicht in Sättigung bleibt? Wo liegt das Problem wenn der Anteil in Sättigung bleibt? Gibt es hier dann ev. ein Probelm, wenn eine Störgröße einwirkt? Ist meine Theorie richtig, dass der Anteil im eingeschwngenen Zustand idealerweise um null pendelt?
Werner13 schrieb: > Aber ist das prinzipiell ein Problem, wenn dieser Anteuil in Sättigung > bleibt? Offensichtlich nicht. Es bedeutet nur, dass du dir in diesem konkreten Fall viel zu viel Arbeit gemacht hast. > Ist meine Theorie richtig, dass der Anteil im eingeschwngenen Zustand > idealerweise um null pendelt? Wobei das pendeln im Idealfall sich auf einen Wert einpendelt (wenn es keine externe Störgröße gibt). Aber ob du das bei diesem konkreten System jemals sehen wirst. Ich hege da so meine Zweifel. Man kann es auch so sagen: dein Regler ist viel zu schnell für dieses träge System. Ich würde sogar soweit gehen zu sagen, dass man das an deinen K-Werten schon erkennen kann. Einem Kp von -41 steht ein Ki von -0.036 gegenüber. Da ist ein Faktor 1000 Unterschied.
Was ich mal probehalber probieren würde geh mal mit der Windup Begrenzung höher.
1 | if(offset_sum <=-25000) |
2 | {
|
3 | offset_sum = -25000; |
4 | }
|
5 | if(offset_sum >=25000) |
6 | {
|
7 | offset_sum = 25000; |
8 | }
|
problem ist natürlich, dass ein Probedurchlauf bei dir recht lange dauert. Wenn der Regler gut arbeitet, dann pendelt sich das System so ein, dass der P-Anteil an der kompletten Reglergleichung zu 0 wird und nur der I-Anteil die benötigte 'Grundleistung' aufbringt um das System stabil zu halten. Das hat mich verblüfft, als ich das erste mal einen PI Regler probehalber aufgebaut habe. Wenn das System weit vom Ziel entfernt ist, dann übernimmt der P-Anteil die komplette 'Arbeit'. Irgendwann kann sich der aber dem Ziel nicht mehr nähern und dann fand etwas zunächst erstaunliches statt: der I-Anteil in der Reglergleichung wurde immer größer, während der P-Anteil abnahm. Bis dann am Ziel der P-Anteil 0 war und der I-Anteil 'die ganze Arbeit' machte. Im Moment denke ich, dass du mit den kleinen Windup Grenzen dem I-Anteil gar nicht die Chance gibst 'die Kontrolle' zu übernehmen. Es ist wie beim Autofahren, wenn 2 Fahrer am Lenkrad drehen sollen: ein schneller der allerdings ordentlich am Rad rumdreht. Und ein feinfühliger, der viel scahter mit dem Lenkrad umgeht. Wenn du den feinfühligen allerdings zu sehr einschränkst, indem du ihm nur winzig kleine Lenkbewegungen erlaubst, dann wird der Grobmotoriker alles machen müssen und der andere dreht nur Däumchen. Und ich denke, in der Situation bist du gerade. Aber sieh dir die einzelnen Anteile der Reglergleichung an. Das müsste man dort eigentlich erkennen können.
Bei der Berechnung des Wertes für KS muss man noch zwischen den PWM% und dem Wert für die Ausgabe (PWM Stufen) unterscheiden. Wenn der Regler die PWM Schritte ausgeben soll, dann müsste man das KS mehr als 20°C/75 Schritte also etwa 0,27 sein. So wie der Regler jetzt ist, gibt er den Bruchteil der Leistung relativ zum Testfall aus. Da müsste man noch umrechnen auf den passenden PWM-Wert - diese Umrechnung muss aber nicht linear sein. Wenn man den Bruchteil der Leistung etwa A nennt könnte eine passende Umrechnung etwa PWM-Wert = 75 * (1 - sqrt( 1-A) ) sein. Entsprechend wäre die obere Grenze für A bei 1. Der Faktor vorne wäre der Wert für den Optimalen Strom, also den wo die Tiefste Temperatur erreicht wird, bzw. am schnellsten gekühlt wird. Das in dem Beispiel oben immer eine Restabweichung bleibt, liegt wohl daran, dass der Integralwert nicht so klein werden darf wie nötig. Der richtige Wert könnte müsste irgendwo bei -600 liegen. Da müsste man also noch die Grenzen anpassen - das ist der Nachteil dieser Antiwindup Lösung: die ist ggf. zu scharf oder auch nicht wirklich effektiv. Damit es mit der Lösung einigermaßen klappt hilft es wenn man zusätzlich zur Regelung noch den ungefähren Ausgabewert zur Zieltemperatur dazu zählt, so dass der Integralteil in erster Näherung klein und unabhänig von der Zieltemperatur bleibt. Der Weg über die Sättigung des Ausgangs ist da einfacher und kommt ohne zusätzliche Parameter aus - wenn man will kann man da ggf. noch ein kleines bisschen Optimieren, damit der Regler die Grenze der Sättigung besser trifft - nötig ist das aber nicht. Einen kleinen Nachteil hat die Version wenn man gleich in der Sättigung anfängt (weil schon der Proportionalteil die Sättigung erreicht) - dann kommt der Regler etwas zu früh etwas aus der Sättigung und ist damit ein bisschen langsamer - das ist aber in der Regel kein wirkliches Problem, macht den Regler nur anfangs etwas langsamer.
@ Werner13 (Gast) >Habe nun folgenden Regler implementiert: >S32 controlled_variable = 0; >S32 Kp = -41; >double Ki = -0.036; >double Kd = 0; Wolltest du nicht Festkommaarithmetik nutzen? OK, das ist hier nicht wirklich kritisch, aber double ist auch Overkill. float reich vollkommen. >Habe nun den Regler für einen Sollwert von 15.0°C aufgerufen, die >Starttemperatur war ca 21°C >Im Anhang das Ergebnis... Sieht meiner Meineung nach super aus. Meiner Meinung nach nicht. Du hast noch ein ganz schönes Schwingen drauf, was gerade bei den hohen Zeitkonstanten recht hervig ist. Deine Reglerparameter sind noch nicht optimal. >Was mir aufgefallen ist, ist, dass die offset_sum für den I-Anteil immer >in Sättigung bleibt! Was ein klares Zeichen für einen Fehler ist. > Der Regler regelt die Temperatur auf 15,3°C ein, >der kleine Offset ergibt sich durch ungenauigkeiten bei der >Temperaturmessung... FALSCH! Ein digitaler Regler macht aus Sicht von "innen" KEINERLEI Fehler, schon gar nicht als PI Regler. D.h. der digitale IST-Wert ist IDENTISCH zum digitalen Sollwert, wenn der Regler eingeschwungen ist. Wenn nicht, ist was faul. Natürlich ist die IST-Wert erfassung sprich Temperaturmessung nie perfekt, aber das spielt für dieses Problem keine Rolle. Der Regler wird solange arbeiten, bis SOLL==IST ist. > D.h. der Offset wird eigentlich nie positiv, somit >bleibt der offset_sum wert immer wuf -250. Wie ist das zu bewerten? Du hast noch einen Bug. >Eigentlich sollte der Wert ja dann um 0 pendeln und im immer kleiner >werden, oder? offset sollte um 0 pendeln und der I-Anteil dann konstant bleiben aber nicht in Sättigung. Vielleicht ist deine Sättigungsgrenze zu klein? http://de.wikipedia.org/wiki/Direct_Digital_Control_%28Regelungstechnisches_Verfahren%29 [c] controlled_variable = Kp * offset + Ki Ta + Kd * (offset -old_offset) / Ta; [c] Wo ist denn hier bitte offset_sum geblieben? Gewöhn dir an VOLLSTÄNDIGEN Code, am besten als Anhang zu posten, nicht zusammenkopierte Schnipsel.
Ach ja, zu Sättigungsgrenze. Im eingeschwungenen Fall ist offset=0 und somit der P und D Anteil nicht wirksam. Es bleibt nur noch der I-Anteil. Damit das aber funktioniert, muss der I-Anteil den Regler über den vollen Aussteuerbereich allein treiben können. D.h. I-Anteil (max) * Ki >= Ausgangsvariable (max) Dito für das Minimum, fallst de Regler ein bipolares Ausgangssignal erzeugt.
Karl Heinz schrieb: > Einem Kp von -41 steht ein Ki von -0.036 gegenüber. Da ist ein Faktor > 1000 Unterschied. Meinst du dass dieser Unterscheid zu hoch ist? OK, ihr meint, dass die Windup Grenze zu eng gesetzt ist... Ich denke auch, dass dies der Hauptgrund ist... Ulrich schrieb: > Der > richtige Wert könnte müsste irgendwo bei -600 liegen. Da müsste man also > noch die Grenzen anpassen Welchen Wert meinst du hier genau? Falk Brunner schrieb: >> Der Regler regelt die Temperatur auf 15,3°C ein, >>der kleine Offset ergibt sich durch ungenauigkeiten bei der >>Temperaturmessung... > > FALSCH! Wenn ich einen Sollwert von 15,0° einstelle, der ungenaue Sensor aber bei 15,3° auf Grund von Ungenauigkeiten 15° misst, dann sind das Ungenauigkeiten des NTC. Somit regelt der Regler intern zwar auf 15°, die wirkliche Temperatur ist aber 15,3°... Das meinte ich damit... Falk Brunner schrieb: > offset sollte um 0 pendeln und der I-Anteil dann konstant bleiben aber > nicht in Sättigung. Vielleicht ist deine Sättigungsgrenze zu klein? Meinst du hier mit Sättigung die Sättigung des Offset_sum (durch die Windup-Grenze) oder die Sättigung des Ausgangssignales? Falk Brunner schrieb: > I-Anteil (max) * Ki >= Ausgangsvariable (max) Das bedeutet, ich sollte die Windup-Grenze mindestens auf den Wert einstellen, richtig? Die Ausgangsvariable wird zwischen 0 und 70 begrenzt (duty cycle, siehe code). Ki ist -0,036. Wie sollten nun die Windupgrenzen eingestellt werden? zwischen 1944 (theoretisch berechnet, kann auch größer sein) und -1944 oder zwischen 1944 und null?? Ja falk, hab da im code den Offset_sum beim I-Anteil vergessen, ist in Wirklichkeit aber dabei... LG
@ Werner13 (Gast) >> Einem Kp von -41 steht ein Ki von -0.036 gegenüber. Da ist ein Faktor >> 1000 Unterschied. >Meinst du dass dieser Unterscheid zu hoch ist? Ja. >Wenn ich einen Sollwert von 15,0° einstelle, der ungenaue Sensor aber >bei 15,3° auf Grund von Ungenauigkeiten 15° misst, dann sind das >Ungenauigkeiten des NTC. Somit regelt der Regler intern zwar auf 15°, >die wirkliche Temperatur ist aber 15,3°... Das meinte ich damit... Eben, das ist aber was anderes. Sinnvollerweise zeigt man aber den intern gemessenen Wert im Diagramm an, um zu sehen was dort los ist. >> offset sollte um 0 pendeln und der I-Anteil dann konstant bleiben aber >> nicht in Sättigung. Vielleicht ist deine Sättigungsgrenze zu klein? >Meinst du hier mit Sättigung die Sättigung des Offset_sum (durch die >Windup-Grenze) Ja. > oder die Sättigung des Ausgangssignales? Kann auch sein. Glaub ich aber eher nicht. >> I-Anteil (max) * Ki >= Ausgangsvariable (max) >Das bedeutet, ich sollte die Windup-Grenze mindestens auf den Wert >einstellen, richtig? Ja. >Die Ausgangsvariable wird zwischen 0 und 70 >begrenzt (duty cycle, siehe code). Ki ist -0,036. Wie sollten nun die >Windupgrenzen eingestellt werden? zwischen 1944 (theoretisch berechnet, >kann auch größer sein) und -1944 oder zwischen 1944 und null?? Du hast nur unipolare Signale, also 1944 und null. >Ja falk, hab da im code den Offset_sum beim I-Anteil vergessen, ist in >Wirklichkeit aber dabei... Du schreibst jetzt EINHUNDERT Mal. "Ich werde IMMER Originalcode posten und NIE Fragmente abschreiben!" Siehe Netiquette.
Mit den -600 meinte ich den Wert der sich für offset_sum in etwa einstellen sollte, wenn man es lässt. Die Sättigungsgrenzen für das Anti-Windup sollten entsprechend angepasst werden. Da die Ausgabe keine negativen Werte Erlaubt, werden auch keine negativen Werte für das Integral benötigt, zumindest nicht stark negativ. Eine Sinnvolle Begrenzung wäre etwa 0 bis +1900. Für einen ersten Test darf man die Grenzen auch etwas weiter fassen und kann dann die dann Später anpassen - ggf. auch etwas enger und temperaturabhängig. Alternativ halt den einfacheren und oft besseren Weg über die Sättigung des Stellgliedes, so wie es oben schon mal war. Der erste Test für den Regler zeigt noch etwas Überschwingen. Das kann z.B. von der nichtlinearen Kurve kommen. Der Ks Wert wird dadurch vom PWM Wert abhängig - bei geringer Leistung ist das Peltierelement effektiver und entsprechend der Ks-Wert etwas größer (bis etwa Faktor 2).
Ulrich schrieb: > Der Ks Wert wird dadurch vom > PWM Wert abhängig - bei geringer Leistung ist das Peltierelement > effektiver und entsprechend der Ks-Wert etwas größer (bis etwa Faktor > 2). Ich verstehe noch nicht, wie ich das genau umsetzen / verhinder soll?! OK, werde die neuen Windup-Grenzen mal testen...
Der Wirkungsgrad des Peltierelements hängt vom Strom ab - je größer der Strom desto geringer wird er Wirkungsgrad. Beim großen Strom für die Sprungantwort ist der Wirkungsgrad nur etwa halb so groß wie bei recht kleinen Strömen. Für die Regelung wird es sogar noch schlimmer, da wird der differentielle Wirkungsgrad (also um wieviel stärker die Kühlwirkung wird, wenn man den Strom erhöht) interessant, und der ändert sich noch stärker (geht gegen 0 wenn der optimale Strom erreicht wird). Das ist einfach der nichtlineare Zusammenhang zwischen Strom und Kühlwirkung. Lösen kann man das, indem man den Regler die Leistung berechnen lässt, und dann den PWM-Wert dazu berechnet. Für kleine Ströme könnte man eine lineare Näherung nutzen - das wäre dann ein Ks Wert der knapp 2 mal so groß wäre wie aus der Kurve oben berechnet (einfach weil ein kleiner Strom einen knapp 2 mal besseren Wirkungsgrad bedeutet). Ein etwas zu großer Ks Wert und damit zu kleine Kp,Ki sind für einen Regler auch eher unproblematisch (langsamere Reaktion) als andersherum (Schwinungsneigung). Etwas Reserve ist in den Formeln für die Regelparameter drin, aber ein Faktor 2 ist dann ggf. doch etwas viel. Besser kann man es machen wenn man mehr als die lineare Näherung nutzt. Wie die Kühlleistung vom Strom abhängt kennt man zumindest im Prinzip: es gibt irgendwo einen optimalen Strom, wo die Kühlung maximal wird. Wo dieser optimale Strom im Idealfall (gute Kühlung) liegt steht ggf. im Datenblatt - mit nicht perfekter Kühlung liegt er etwas niedriger. Den Strom für die maximale Kühlwirkung sollte man ohnehin kennen für die Begrenzung des Stromes. Zumindest sollte der maximale Strom nicht höher liegen. Neben dem Maximum weiß man auch noch, dass bei 0 Strom keine Kühlwirkung da ist. Mit den beiden Punkten (0,0) und dem Maximalwert (etwa der maximale Strom als Näherung) ist die Kurve (Parabel) bereits festgelegt. Der Zusammenhang ist P = P_max*(1-(x-1)^2) , wobei x der Strom geteilt durch den optimalen Strom ist. Umgekehrt kriegt man damit x = 1 - sqrt(1-P/P-max) also Formel für die Umrechnung Leistung nach PWM- Wert. Eine gewisse Unsicherheit bleibt noch beim Schätzwert für den optimalen Strom: für die Grenze beim Strom geht man hier besser von einem etwas kleineren Wert aus - für die Umrechnung Leistung -> PWM besser von einem größeren.
Angehängte Dateien:
-

Tempregelung.png
2,7 KB
Habe nun die Windup Grenzen auf -2000 bis +2000 erhöht, den Rest gleichgelassen. Habe deswegen bipolar gewählt, weil sich die Temperatur ja theoretisch auch von der anderen Seite nähern könnte... Ergebnis im Anhang... Da ist mehr schwingen drauf als vorher, aber der offset_sum ist nicht mehr dauernd über den grenzen, sondern liegt zum schluss so zwischen -600 und -800... Ist das nun eine verbesserung oder nicht? Was soll ich als nächstes ändern, damit ichd as Schwingen loswerde? Eine Erhöhung des P-Anteils würde die Distanz zwischen Kp und Ki noch weiter erhöhen... Danke!
@ Werner13 (Gast) >mehr dauernd über den grenzen, sondern liegt zum schluss so zwischen >-600 und -800... Ist das nun eine verbesserung oder nicht? Eine Verbesserung. Wie sieht dein offset aus? Der muss um 0 herum pendeln. >Was soll ich als nächstes ändern, damit ichd as Schwingen loswerde? Reglerparameter optimieren. > Eine >Erhöhung des P-Anteils würde die Distanz zwischen Kp und Ki noch weiter >erhöhen... Das ist erstmal egal. Im I-Anteil steckt auch das Verhältnis Abtastfrequenz zu Reglerzeitkonstante. Und da deine Abtastfrequenz im Verhältnis zum Zeitkonstante des Systems sehr groß ist, muss der I-Anteil sehr klein sein. Passt schon.
Ja, der offset pendelt um 0... Werde mal versuchen, den Kp zu erhöhen...
Der Überschwinger ist schon deutlich. Da wäre eine bessere Anpassung der Regelparameter angesagt. In der Einfachen Form wohl einfach Ki und Kp um den gleichen Faktor kleiner zu machen, denn die berechnete Wert sollten etwas zu groß sein - so wie ich es schon oben erklärt hatte. So schlimm ist das Nachschwingen nicht, da könnte auch schon ein Faktor von 1,2-1,5 ausreichen statt der knapp 2 auf Grund der Kennlinie. Alternativ könnte man auch die Linearisierung der Kennlinie des Peltierelements machen: also Ki und Kp auf die Leistung anpassen (Faktor 75 kleiner) und dann per 80*(1-sqrt(p)) auf den PWM Wert kommen. Für kleine PWM Werte ist das etwa der Faktor 2 für Ki und Kp. Die Linearisierung sollte etwas besser sein, bei deutlich tiefere Solltemperaturen und damit großen PWM werten. Wenn es sehr dicht an die minimale Temperatur geht müsste man wohl noch mal den Optimalen Strom (hier PWM Wert 80 angenommen) überprüfen. Gegen den ersten Überschwinger könnte ggf. die Antiwindup Lösung über die Sättigung des Stellgliedes besser sein, muss aber nicht. Alternativ könnt man auch die Grenzen enger legen, indem man ausnutzt das man weiß, das für diese Temperatur der Integralwert sich irgendwo bei -600 bis -800 einpendelt. Da könnte man also die Werte auf z.B. -400 bis -1000 einschränken. Aber aufpassen - mit geänderten Regelparametern und anderer Solltemperatur ändert sich auch das Intervall. Schließlich gäbe es noch die Möglichkeit einen PID Regler statt PI zu wählen - der kann besser werden.
Werner13 schrieb: > Ja, der offset pendelt um 0... > > Werde mal versuchen, den Kp zu erhöhen... Ich weiß., das klingt jetzt doof. Aber Was meinst du mit erhöhen? Dein Kp ist ja negativ. Ist erhöhen ein Ändern von -41 auf -35 Oder ist erhöhen ein Ändern von zb -41 auf -56 Ehe du an den Werten rumschraubst, würde ich mal den I-Anteil auf 0 stellen und mir ansehen, was der P-Regler alleine macht. Die 'praktische Einstellmethode' geht ja so vor, dass der P-Anteil so lange größer gemacht wird (der Absultwert von Kp), bis die ersten Schwingungen einsetzen. Von dort dann den Absolut-Wert etwas verringern und erst dann den I-Anteil mit dazu nehmen. D.h im Umkehrschluss: würdst du Ki mal auf 0 setzen und einen Testdurchgang fahren, dann könnte man beurteilen ob dein Kp betragsmässig schon zu groß ist - wovon ich genauso wie Ulrich eigentlich ausgehe. Wichtig: ein P-Regler alleine kann nicht die Solltemperatur erreichen. D.h. es spielt in dieser Unterschung keine Rolle, auf welchen Wert sich der Regler einpendelt. Es spielt nur eine Rolle WIE er das tut. Mit heftigem Schwingen oder ohne.
Hallo! Ja, hab meine ursprünglichen Plan nun geändert und teste jetz nur mit dem P-Regler... Mit größer machen meine ich betragsmäßig... Ich habe den Kp wert nun auf -150 eingestellt und den Ki auf null... zeig euch dann das ergebnis!
Werner13 schrieb: > Ich habe den Kp wert nun auf -150 eingestellt und den Ki auf null... > zeig euch dann das ergebnis! Bin schon neugierig. Vor allem, was die -150 angeht. Ich hätte jetzt eigentlich erwartet, dass die |-41| schon zu hoch sind und ein Wert von -38 oder -35 angebracht wäre. Aber, man kann sich täuschen. Die Praxis zeigt einem dann schon, ob man recht hat oder nicht.
@ Karl Heinz (kbuchegg) (Moderator) >Ich weiß., das klingt jetzt doof. Aber >Was meinst du mit erhöhen? Dein Kp ist ja negativ. >Ist erhöhen ein Ändern von -41 auf -35 >Oder ist erhöhen ein Ändern von zb -41 auf -56 Schon mal ein Grund, das Vorzeich dort rauszuschmeißen und an eine andere Stelle der Formeln zu packen. Die Koeffizienten sind eigentlich immer positiv. Ich würde das negative Vorzeichen in die PWM-Kennlinie packen.
Angehängte Dateien:
-

Tempregelung1.png
2,4 KB
Hallo! Bei der Messung nur mit dem Kp Anteil hat das System (ganz leicht) zu schwingen begonnen bei Kp = -200. Nun hab ich einen Ki von -0.03 dazugegeben und folgendes Ergebnis errreicht (sieh Anhang).. Die Interferenz zum Schluss war eine Störgröße (Deckel des Behälters wurde geöffnet)... Abegsehen davon sehe ich ein deutliches Überschwingen und danach ein leichtes Steigen der Temperatur... Das ist kein gutes Ergebnis... Was ich noch bem,ekrt hatte, dass der DutyCycle am Anfang in der oberen Sättigung war (maximaler Wert, ist auch OK, er muss ja so schnell wie möglich kühlen) und dann bei ersten Unterschwinger war der DutyCycle in unterer Sättigung (also 0, die Kühlung wurde abgeschalten)... Was meint ihr dazu?
Ach ja: die windup grenzen für die offset summe sind mit -2000 und 2000 eingestellt!
@ Werner13 (Gast) >Bei der Messung nur mit dem Kp Anteil hat das System (ganz leicht) zu >schwingen begonnen bei Kp = -200. Nun hab ich einen Ki von -0.03 >dazugegeben und folgendes Ergebnis errreicht (sieh Anhang).. Die >Interferenz zum Schluss war eine Störgröße (Deckel des Behälters wurde >geöffnet)... Womit die Messung sinnlos wurde. >Abegsehen davon sehe ich ein deutliches Überschwingen und >danach ein leichtes Steigen der Temperatur... Das ist kein gutes >Ergebnis... Du hast es erfasst. >Was meint ihr dazu? Da ist noch Luft für Verbesserungen. Man sollte vielleicht erstmal noch einen Test machen. Peltier auf maximale Kühlung für 1-2h, damit sieht man welche Reaktionzeiten man beim Kühlen hat. Dann Peltier aus für 2h, dann sieht man, wie das System sich wieder erwärmt. Denn soooo einfach ist dein Regelkreis nicht, weil die Erwärmung rein passiv über die Umgebung erfolgt, aktiv per Peltier machst du das ja nicht. Damit hat man ggf. verschiedene Zeitkonstanten, die man berücksichtigen muss. Der klassische Regelkreis aus dem Lehrbuch kennt so ein Problem nicht.
Angehängte Dateien:
-

Tempregelung2.png
4,1 KB
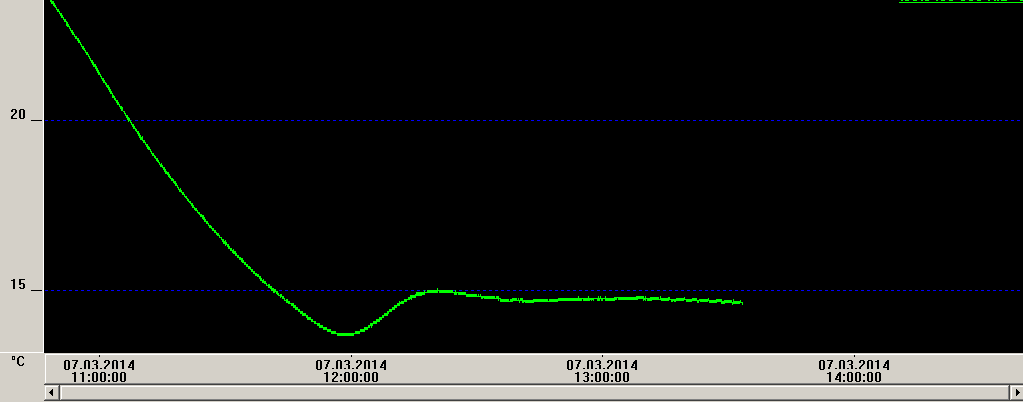
Hallo, anbei der test... Kühlung_ein: System wurde mit voller Leistung gekühlt Kühlung_aus: Kühlung abgeschalten. Anbei auch noch ein test, der gerade durchgeführt wurde: Ich habe die WindupGrenzen wieder auf 1000 und -1000 gesetzt, zum schluss war die Regelabweichung konstant auf -0.03, die offset summe war jedoch wieder über der Grenze (konstant -1000). Was sagt ihr dazu?
Es ist ja halbwegs symetrisch, kühlen von 25 auf 5C dauert ~2h, Erwärmen auch. Glück gehabt. Damit sollten mit den klassischen Methoden eine gute Regelung hinkriegen.
OK, und was würdest du als weitere vorgehensweise vorschlagen? Ich würde nun die Windup-Grenze wieder auf +/- 1500 erhöhen, weil offset_sum ja zum Schluss konstant auf -1000 war... Aber dies wird vermutlich die Schwingung wieder erhöhen...
Est mal praktische Messwerte sammeln und dann die Feinjustage.
@ Werner13 (Gast) >Tempregelung2.png >Anbei auch noch ein test, der gerade durchgeführt wurde: Also das sieht schon recht gut aus. Leichtes Überschwingen und dann relativ schnell eingeschwungen. > Ich habe die >WindupGrenzen wieder auf 1000 und -1000 gesetzt, zum schluss war die >Regelabweichung konstant auf -0.03, die offset summe war jedoch wieder >über der Grenze (konstant -1000). Wie soll das gehen, wenn sie begrenzt wird?
Falk Brunner schrieb: >> Ich habe die >>WindupGrenzen wieder auf 1000 und -1000 gesetzt, zum schluss war die >>Regelabweichung konstant auf -0.03, die offset summe war jedoch wieder >>über der Grenze (konstant -1000). > > Wie soll das gehen, wenn sie begrenzt wird? Ich meinte damit, dass die Grenze erreicht ist (-1000). Das ist doch nicht gut, wenn im eingeschwungenen Zustand die offset summe nicht mehr aus der Begrenzung kommt, oder?
@ Werner13 (Gast) >Ich meinte damit, dass die Grenze erreicht ist (-1000). Aha, dann sollte man es auch so formulieren ;-) >Das ist doch >nicht gut, wenn im eingeschwungenen Zustand die offset summe nicht mehr >aus der Begrenzung kommt, oder? Nein, das ist nicht gut, aber es zeigt eine Richtung. Wenn der I-Anteil in der Begrenzung festhängt und der Regler dadurch scheinbar besser regelt, ist der I-Anteil zu groß. Halbiere mal Ki und schau was passiert, allerdings mit größeren Grenzen. Das Dumme ist hier nur, dass du für die Messung immer 2h warten musst :-(
Habe jetz bevor du geantwortet hast dei Windup wieder auf +/- 1500 gesetzt, ohne Ki zu ändern... Nun hab ich wieder ein relativ großes Schwingen drauf, das konstant bleibt (+/- 1°C).... Hab leider kein aktuelles Bild dazu...
Angehängte Dateien:
-

Tempregelung3.png
4,1 KB
Nun hab ich Ki gedrittelt, auf -0.01, Kp ist weiter auf -200. Das System schwingt wieder, siehe Anhang
So sinnlos ist die Messkurve mit der Störung nicht - nur das die Kurve relativ kurz danach aufhört. Dort hat man das Verhalten nach einer eher kleinen Störung (ohne Sättigung) - dass wofür der klassische Regler und die Einstellregeln für die Regelparameter ausgelegt sind. Das der Regler nach dem voll Kühlen dann noch einmal bis auf 0 zurück geht ist im Prinzip noch nicht falsch (ein optimaler Regler würde das vermutlich auch tun), aber doch eher ein Zeichen dafür das der Regler nicht gut aus der Sättigung herauskommt. Die Größe des ersten Überschwingers ist ein Kombination aus einer Anregung bzw. Störung durch den Sättigungszustand und der Fähigkeit des Reglers sich von der Störung zu erholen. Die Fähigkeiten des Reglers sieht man daran wie es danach von unten in Richtung Sollwert geht, und das ist bei einigender Kurven oben gar nicht so schlecht. Der eine Überschwinger ist bei einem PI Regler nicht zu vermeiden anders kommt der Integral-anteil nach der Sättigung nicht wieder zurück auf den richtigen Wert. Die Größe des Überschwingers kann man aber über die eine bessere Anti Windup Strategie reduzieren, etwa das integrieren auszusetzen wenn die Sättigung erreicht ist, oder sehr viel enger gesetzte (und dafür an die Solltemperatur angepasste) Grenzen. Für einen schnellere Regler, der sich besser von der Störung erholt müsste man sonst ggf. auf einen PID Regler gehen - da geht es auch ohne den ersten Unteschwinger.
http://de.wikipedia.org/wiki/Faustformelverfahren_%28Automatisierungstechnik%29#Empirische_Dimensionierung Also P runternehmen und schauen. Tempregelung3.png sieht schon ganz gut aus, weil dort der I-Anteil nicht in die Sättigung geht, das vereinfacht einiges.
Ich habe vergessen dazuzusagen, dass ich nun die Sensoren nicht in der Luft hängen hab, sondern am Metallkörper befestigt hab. Dadurch ist das System vermutlich um eineiges schneller geworden und daher auch das schwingen... ich werde keine neue Sprungantwort aufnehmen, sondern den Ki auf null lassen und Kp so lange erhöhen, bis das system schwingt... Danach einen kleinen I-Anteil dazu...
Angehängte Dateien:
-

Tempregelung4.png
3,7 KB
Hallo, Nachdem ich nun den Temperatursensor direkt am Metall angebracht habe, habe ich auch eine neue regelstrecke... Hab nun einen test nur mit aktivem P-Anteil (Kp = -50) gemacht, anbei das Ergebnis... Zeigt ein eindeutiges Schwingen... Also der nächste Schritt wäre, Kp verringern und nochmal testen, richtig? Ich habe die Regelung auf 15°C eingestellt, damit ich nicht immer so lange warten muss... Im richtigen System wird dann aber auf ca 7°C geregelt, ist das ein Problem? Kann das verglichen werden oder muss ich auch bei den tests immer auf 6°C regeln?
Das ist nur Kp? Dann ist |Kp| etwas zu groß. Kp = -30 sollte die Schwingneigung verringern.
Jap das ist nur Kp. Genau, das habe ich auch geplant, werde den Kp mal auf -30 setzen...
> Ich habe die Regelung auf 15°C eingestellt, damit ich nicht immer so > lange warten muss... Im richtigen System wird dann aber auf ca 7°C > geregelt, ist das ein Problem? Kann das verglichen werden oder muss ich > auch bei den tests immer auf 6°C regeln? Wie siehts damit aus, ist das ein Problem? Ich denke, solange der Regler am Anfang des Tests in Sättigung ist, sollte das kein Problem sein, wie weit er runter regelt richtig? Oder wird sichd ann bei den Parametern wieder was ändern, wenn ich danach bis 6°C runter regle?
Angehängte Dateien:
-

Tempregelung5.png
3,5 KB
Hier das Ergbenis mit einem Kp von -30... Die schwingung ist deutlich geringer! soll ich nun mit Kp noch weiter runter gehn oder kann ich nun schon einen kleinen Ki Anteil dazugeben? LG
Angehängte Dateien:
-

Tempregelung6.png
3,5 KB
Hallo, habe den Kp nochmal auf -25 verringert... hier das ergebnis, ichd enke ich werde den Kp nun so lassen... Nun soll ein I-Anteil dazu... Wie soll ich hier vorgehen? Ich welcher Größenordnung soll der für erste Tests liegen? Wie kann ich dann erkennen, ob der Ki Wert zu groß bzw zu niedrig gewählt wurde? Danke!
Hallo, habe nun einen I-Anteil dazugetan: Kp wie vorher -25 Ki -0,05 Windup-Grenzen für Ki: -1500 und 1500 Das Ergenis im Anhang, zum schluss war die Regelabweichung konstant bei 0,003 und die Summenabweicheung für den I-Anteil (offset_sum), bei der die Begrenzung -1500 bis 1500 eingestellt ist, lag bei -466 (auch ziemlich konstant). Das sieht meiner Meinung nach super aus, oder? Den kleinen Unterschwinger am Anfang benötige ich ja, sonst komme ich nie aus der Windup-Grenze zurück. Also bei einem I-Anteil und Windup Grenze geht das gar nicht anders, richtig? Danke!
@ Werner13 (Gast) >Das Ergenis im Anhang, zum schluss war die Regelabweichung konstant bei >0,003 Sollte nicht so sein, kann aber ein Artefakt deiner Fließkommazahlen sein. > und die Summenabweicheung für den I-Anteil (offset_sum), bei der >die Begrenzung -1500 bis 1500 eingestellt ist, lag bei -466 (auch >ziemlich konstant). Das sieht meiner Meinung nach super aus, oder? Sieht gut aus. >aus der Windup-Grenze zurück. Also bei einem I-Anteil und Windup Grenze >geht das gar nicht anders, richtig? Keine Ahnung, kann sein. Aber denk dran, du regelst jetzt die Temperatur an deinem Gehäuse, nicht in der Luft. Ob das gut oder schlecht ist, musst du wissen.
Sofern der Sollwert bei etwa 16 C liegt, sieht die Kurve schon brauchbar aus - sonst ist da wohl noch was am Programm (nicht nur die Parameter) falsch. Viel besser geht ggf. mit einem PI Regler nicht - zumindest nicht für den reinen Regler. Bei der Anti-windup Lösung könnte man es noch besser machen und damit den 1. Unterschwinger kleiner bekommen. Mit der Gewählten Form über die Begrenzung des Integralteils und einen PI Regler geht es nicht ohne den Unterschwinger - je enger man die Grenze wählt, desto kleiner wird der Unterschwinger. Da der Wert, der sich schließlich einstellt von der Temperatur (und den Umgebungsbedingungen) abhängt, ist das mit der passenden Grenze nicht so ganz einfach. Die meist bessere (und auch einfacher, weil man die Grenzen nicht schätzen muss) Lösung ist Antiwindup über die Begrenzung des Stellgliedes: da kommt man aus der Übersteuerung eher mit einem zu kleinen Integralwert und nähert sich von oben an. Im Idealfall braucht man aber auch da einen Schätzwert für den PWM Wert als Funktion der Solltemperatur. Ein Problem was man aber noch hat, ist dass das Peltierelement nichtlinear ist. Damit sind die optimalen Regelparameter von der Temperatur abhängig. Sofern der PWM Wert linear in einen Strom übersetzt wird, wird zu höheren Strömen bzw. tieferen Temperaturen das Stellglied weniger wirksam. Damit wird der Regler langsamer (geringere Schleifenverstärkung), aber immerhin nicht instabil. Schlimm wird es vor allem wenn man sich der minimal erreichbaren Temperatur annähert. Bei höheren Temperaturen könnte der Regler noch etwas schneller werden - aber wohl auch nicht so viel das er instabil wird. Da der prinzipielle Zusammenhang Strom - Kühlwirkung bekannt ist (Parabel), ist der Aufwand für die Linearisierung auch relativ gering - eine nur näherungsweise (weil der optimale Strom nicht genau bekannt ist) Linearisierung ist immer noch besser als keine. Für die 15 Grad bringt das noch nicht viel, aber bei den 5 Grad als Zieltemperatur kann das schon etwa einen Faktor 2 (den hätte man etwa bei der Hälfte des optimalen Stromes) in den Regelparametern ausmachen.
Hallo! Der Sollwert liegt nicht bei 16° sondern bei 15... das Problem ist die Ungenauigkeit des verwendeten NTC +m Ungenauigkeiten beim ADC. Systemintern liegt die Temperatur also bei 15°C in Wirklichkeit liegt sie aber bei ca 16... Aber das soll soweit nicht stören, es kann später ein genauerer NTC eingesetzt werden... Lurchi schrieb: > Ein Problem was man aber noch hat, ist dass das Peltierelement > nichtlinear ist. Damit sind die optimalen Regelparameter von der > Temperatur abhängig. Sofern der PWM Wert linear in einen Strom übersetzt > wird, wird zu höheren Strömen bzw. tieferen Temperaturen das Stellglied > weniger wirksam. Damit wird der Regler langsamer (geringere > Schleifenverstärkung), aber immerhin nicht instabil. Schlimm wird es vor > allem wenn man sich der minimal erreichbaren Temperatur annähert. > Bei höheren Temperaturen könnte der Regler noch etwas schneller werden - > aber wohl auch nicht so viel das er instabil wird. > > Da der prinzipielle Zusammenhang Strom - Kühlwirkung bekannt ist > (Parabel), ist der Aufwand für die Linearisierung auch relativ gering - > eine nur näherungsweise (weil der optimale Strom nicht genau bekannt > ist) Linearisierung ist immer noch besser als keine. Für die 15 Grad > bringt das noch nicht viel, aber bei den 5 Grad als Zieltemperatur kann > das schon etwa einen Faktor 2 (den hätte man etwa bei der Hälfte des > optimalen Stromes) in den Regelparametern ausmachen. Ich verstehe das noch immer nicht ganz, Ulrich hat es auch schon angesprochen... Wie soll ich diese Linearisierung machen bzw. woher bekomme ich die Parabel?
Die Parabel bekommt man aus dem einfachen üblichen Model eines Peltier-elements. Es gibt halt einen Strom bei dem das Peltier-element am meisten kühlt (und erreicht bei dem Strom auch die Tiefste Temperatur). Wo dieser Optimale Strom liegt, steht üblicherweise im Datenblatt. In der Regel ist der Strom etwa beim maximalen erlaubten Strom oder etwas darunter. Was in der Regel nicht dabei steht, ist dass der optimal Strom etwas kleiner wird, wenn die Kühlung der warmen Seite nicht perfekt ist. Wenn man es also genau haben will, müsste man den optimalen Strom experimentell bestimmen - das müsste man auch schon damit man die Grenze für den PWM-wert optimal wählen kann. Für den Anfang kann man aber auch einfach den Wert aus dem Datenblatt übernehmen - das ist etwas ein obere Grenze und die Kurve Leistung -> PWM Wert wird damit etwas flacher. Das ist nicht perfekt, aber unkritisch. Ein zu klein geschätzter Optimale Strom wäre schlechter. Neben dem Maximum gibt es noch einen 2. ausgezeichenten Punkt: nämlich Srom 0 gibt Leistung 0. Mit dem geschätzten optimalen Strom ist damit die Parabel bereits festgelegt, bis auf die Skalierung der Leistung, die kriegt man aus der Messung der Antwortfunktion. Wie man die Leistung dann in den PWM-Wert umrechnet steht schon einmal oben: Wenn man den Bruchteil der Leistung etwa A nennt wäre die Umrechnung dann PWM-Wert = PWM(I_optimal) * (1 - sqrt( 1-A)). Den Wert für A bestimmt der Regler - A geht im Prinzip von 0 bis 1 , wobei ggf. eine künstliche Grenze bei etwa A=0,9-0,95 dazu kommt, damit der Strom nicht zu hoch wird (weil PWM(I_optimal) eher etwas zu groß geschätzt wird). Den Optimalen Strom könnte man etwa bestimmen indem man ein Programm mit festen PWM-Werten druchläuft. Etwa in Schritten von 5-10% den Strom ansteigen lassen und jeweils etwa 5-20 min pro Wert warten, so dass man die Größe des Temperatursprungs (oder die Änderung in der Steigung - geht vermutlich schneller) abschätzen kann. Dann die Größe des Sprungs (Knicks) gegen den PWM Wert auftragen - das sollte in etwa eine Gerade geben die beim optimalen Strom die 0-Line schneidet.
Hallo Zusammen, ich will auch für meinen DC-DC Wandler einen PI Regler implementieren. Wie bei der Temperatur regelung, habe ich keinen Schaltplan der Regelstrecke. Durch ansteuern der dutycycle wird regelgröße (d.h. die Ausgangsspannung) auf einen bestimmten Wert geregelt. Alles funktioniert ziemlich gut ohne PI-Regler. Aber mit PI-Regler werden die Ergebnissen viel genauer. Ich bedanke mich für jede Hilfe. Viele Grüße Margo
Bitte melde dich an um einen Beitrag zu schreiben. Anmeldung ist kostenlos und dauert nur eine Minute.
Bestehender Account
Schon ein Account bei Google/GoogleMail? Keine Anmeldung erforderlich!
Mit Google-Account einloggen
Mit Google-Account einloggen
Noch kein Account? Hier anmelden.