
{kind=link}
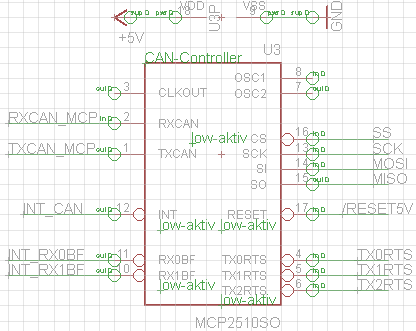
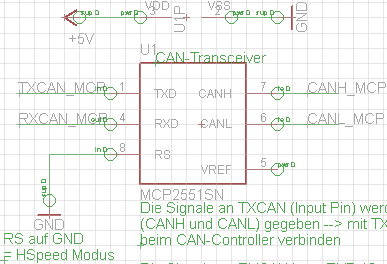
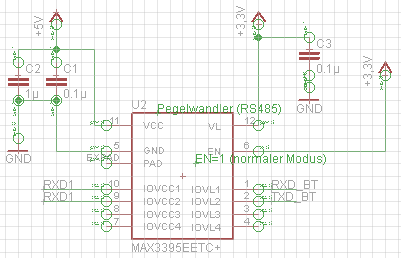
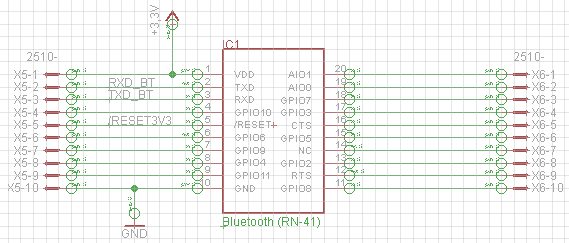
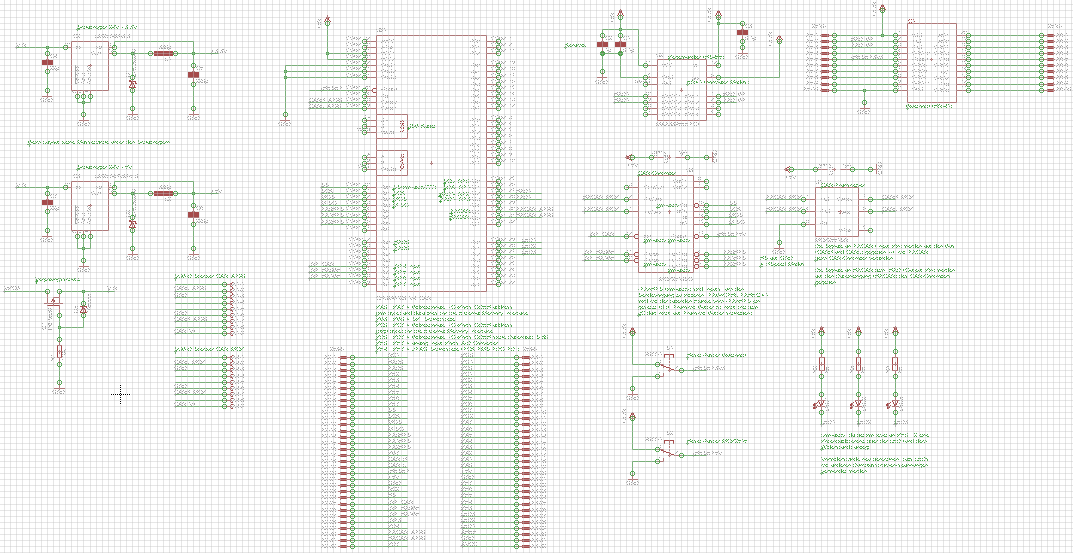
Hallo liebe Leute, ich mache gerade meine ersten Gehversuche als Ingenieur (Praxissemester), habe bisher leider noch nie mit CAN gearbeitet und bin jetzt an einem Projekt dran, bei dem ich ein CAN to CAN Gateway entwickeln soll. Die Aufgabe besteht darin, eine Hardware inlusive Software für das Gateway zu entwickeln. Dabei soll (für den späteren Kunden) zusätzlich die Möglichkeit bestehen am PC das Gateway zu konfigurieren und über eine Bluetooth-Schnittstelle den CAN-Bus auf einem mobilen Gerät (Tablet oder ähnliches) zu überwachen. Konfigurationsmöglichkeiten: - Signalmapping (Gateway soll aus mehreren Botschaften die benötigten Informationen in einer Botschaft zusammenfassen - Identifierumsetzung (Anpassen der Botschafts-ID) - Nachrichtenfilterung (nicht relevante Nachrichten soll das Gateway ignorieren) - Datenratenanpassung (bei Übertragung von High- auf Low-Speed CAN und umgekehrt) Gerade bin ich noch beim Hardware-Entwurf. Durch einen Kollegen, der schon mit CAN zu tun hatte, bin ich auf folgendes Board aufmerksam geworden: https://www.chip45.com/products/crumb128-can-5.0_avr_atmega_modul_board_at90can128_usb_rs232_can.php Bei diesem Board ist ein AT90CAN128 + HighSpeed Transceiver (PCA82C251), ein USB-UART Wandler (CP2102) und eine RS232-Schnittstelle (MAX3221) verbaut. Dieses Board, zwei Schaltregler (LM2574M-5.0, LM2574M-3.3), ein Verpolungsschutz (MOSFET), einen externen CAN-Controller (MCP2510) + Transceiver (MCP2551) und das Bluetooth-Modul RN41XV + Pegelwandler (MAX3395) habe ich bisher für mein Gateway-Board vorgesehen. (siehe Anhang) Nun kommen wir zu den eigentlichen Fragen: 1.) Bei dem Crumb128CAN 5.0 sind beide USART-Schnittstellen des AT90CAN bereits durch die USB- bzw RS232-Schnittstelle belegt. Kann ich jetzt die jeweiligen PINs (RXD0/RXD1 und TXD0/TXD1) trotzdem ganz normal verwenden? Da müsste es doch Probleme geben oder zumindest müsste man aufpassen, dass es bei der Kommunikation keine Konflikte gibt, oder was meint ihr? 2.) Das Gateway soll später eventuell in ein Gehäuse und mit einer Spannung im Bereich von 7V - 18V versorgt werden. Dementsprechend muss der Anschluss (über Bananenstecker) für die Spannungsversorgung nach außen geführt werden. Könnt ihr mir für den Anschluss ein Bauteil in der EAGLE-Bibliothek empfehlen? Ich komm mit der unendlichen Bibliothek noch nicht zurecht. Gleiches gilt für die Shottky-Diode beim Schaltregler. Gibt es vielleicht welche die besser geeignet sind? 3.) Diese Frage bezieht sich auf den ersten Teil der 2.) Frage. Der CAN-Bus wird mit dem üblichen 9 Pin D-SUB Stecker bereit gestellt. Dabei ist auch eine Versorgungsspannung von 24V an PIN 9 vorgesehen. Kann ich diese Spannung einfach auf den Eingang vom Verpolungsschutz und den Ausgang des Verpolungsschutzes auf den Eingang der Schaltregler geben? 4.) Falls ihr Verbesserungsvorschläge zur Verschaltung/Beschaltung der Komponenten habt oder euch Fehler auffalllen, wäre ich über jeden Hinweis dankbar. So des wars erstmal... Aber es kommen bestimmt noch ein paar Fragen ;-) Mit freundlichen Grüßen B0bbyR4y
Angehängte Dateien:
-

Crumb128CAN_5.0.PNG
11 KB -

CAN-Controller_MCP2510.PNG
5,8 KB -

CAN-Transceiver_MCP2551.PNG
4,8 KB -

Pegelwandler.PNG
4,3 KB -

Bluetooth-Modul.PNG
4,7 KB -

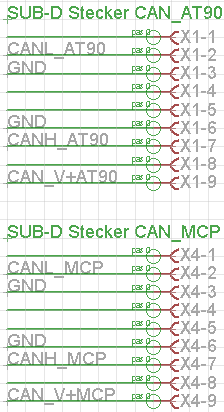
D-SUB_Stecker.PNG
4,4 KB -

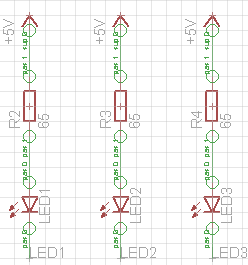
LEDs.PNG
2,1 KB -

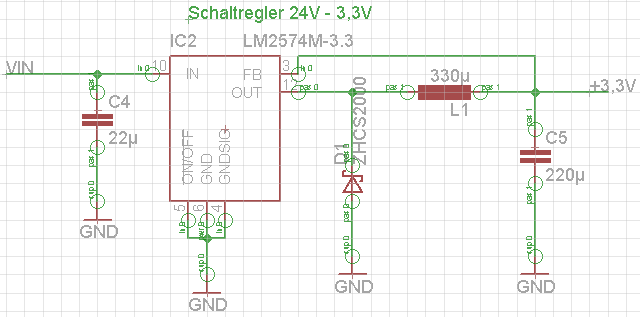
Schaltregler_3_3V.PNG
6,1 KB -

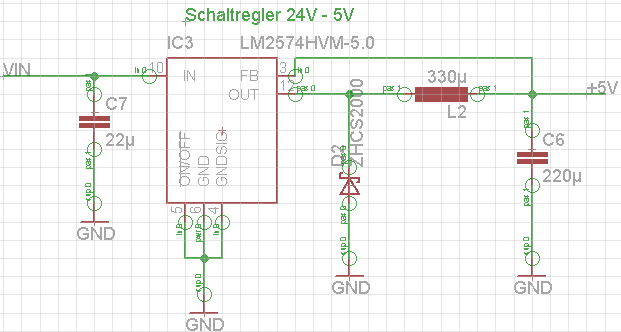
Schaltregler_5V.PNG
6,1 KB -

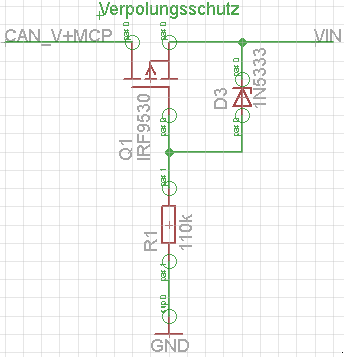
Verpolungsschutz.PNG
3,3 KB -

Schaltplan.PNG
22 KB
So gern ich auch mit dem 90CAN32 arbeite, als Gateway taugt der nicht weil der nur eine richtige CAN-Schnittstelle hat. Die Nummer mit dem MCP am SPI ist nur eine Krücke aus einer Zeit als es noch nichts besseres gab. Nimm was mit zwei CAN-Schnittstellen das bei Euch im Haus programmiert werden kann, es gibt soviel davon. AVR32UC3C, V850ES, MCP5602 (alles mit 64 Pins im 0,5 mm Pitch verfügbar) dsPIC33irgendwas, STM32, irgendwelche ARMs von TI und so weiter und so weiter Wenn es Automotive sein soll wird die Liste kürzer, STM32 ist dann schonmal glatt raus weil ST die nicht für diesen Markt baut sondern lieber PPC-Kerne in Lizenz von Freescale anbietet. Für ein Gateway ist ein Controller mit floating point wohl auch nicht die schlechteste Wahl. Also eine Abstimmung mit den Softwerkern ist da eine gute Idee. Bruno Kempf schrieb: > - Datenratenanpassung (bei Übertragung von High- auf Low-Speed CAN und > umgekehrt) Low-Speed CAN ist nicht einfach nur langsamer, das erfordert einen anderen Transceiver der auch nicht pin-kompatibel ist. Also muss man für solche Geschichten alles doppelt vorhalten.
Du solltest erstmal abschätzen, wie viele Daten du da in welche Geschwindigkeit drüber routen willst. Deine Anwendung klingt wie Automobil und da wird auch gern bis zu High-Speed CAN gegriffen. Je nach dem, was du dann noch mit den Daten zwischendurch machen willst kann das mit dem AVR äußerst eng werden. Sind es überwiegend ein paar ID-Änderrungen, kein Thema, aber wenn du noch Berechnungen oder eingebettete Simulink-Modelle durchgehen musst ... Und je länger du rechnest, desto mehr CAN Daten musst du zwischenspeichern. Da kann bei HighSpeed CAN in kürzester Zeit einiges zusammen laufen. Du solltest auch beachten, dass eventl. die Zykluszeit der Nachrichten eine Rollle spielt, welche eventl. dann bei bestimmten Botschaften durch vorherige Verarbeitung andere Botschaften verändert werden ... Ich empfehle dir lieber eine leistungsstärker Hardware zu wählen, ist kaum teurer und bietet am Ende vielleicht ein paar Reserven statt Datenverluste und Schweiß auf der Stirn.
Ich schließe mich den Empfehlungen meiner Vorredner an. Anscheinend sind hier viele Leute unterwegs die CAN-Gateways machen sollen. Heute vormittag war einer mit PIC da, den ich auf einen dsPIC33EP gesetzt habe. Beitrag "CAN Gateway mit PIC" Einen PIC32MX795F512 ist auch leicht zu beschaffen und hat 80 MHz, 512k Flash, 128k RAM und die beiden erforderlichen CAN-Einheiten. fchk
Bruno Kempf schrieb: > 3.) Diese Frage bezieht sich auf den ersten Teil der 2.) Frage. Der > CAN-Bus wird mit dem üblichen 9 Pin D-SUB Stecker bereit gestellt. Dabei > ist auch eine Versorgungsspannung von 24V an PIN 9 vorgesehen. Kann ich > diese Spannung einfach auf den Eingang vom Verpolungsschutz und den > Ausgang des Verpolungsschutzes auf den Eingang der Schaltregler geben? Die SubD9-Standard-Pinbelegung ist ursprünglich von CiA (CAN in Automation, www.can-cia.org) definiert worden, und zwar in Standard CiA303 Part 1. Zu Pin 9 steht dort in Abschnitt 6.1 auf Seite 9: "Optional CAN external positive supply (dedicated for supply of transceiver and optocouplers, if galvanic isolation of the bus node applies)" Auf deutsch: Die 24V dort sind nur für die Versorgung von Transceiver und Optokopplern gedacht, um bei galvanischer Trennung DC-DC-Wandler zu vermeiden. Die komplette Versorgung des Gerätes über den Busstecker ist gemäß diesem Standard nicht vorgesehen. Du bist natürlich frei, von diesem Standard abzuweichen, solltest aber wissen, dass Du das tust. fchk
Hi, danke schon mal für die Anregungen. Ich werde mir mal die Mikrocontroller ansehen, die ihr mir vorgeschlagen habt. Allerdings sollte der AT90CAN ausreichen und ist für das erste Projekt auch ganz gut, um rein zu kommen. Das mit der Spannungsversorgung über den Sub-D Stecker werde ich sein lassen. Mit freundlichen Grüßen Bruno Kempf
Bruno Kempf schrieb: > Allerdings > sollte der AT90CAN ausreichen und ist für das erste Projekt auch ganz > gut, um rein zu kommen. 1. Um rein zu kommen ist es ganz gut ne LED blinken zu lassen, nicht ein CAN Gateway zu programmieren. 2. Musst du zwei CAN Controller über SPI ansteuern, das ist deutlich schwerer als einfach einen Controller zu programmieren der beides intern hat. Ich würde dir raten einen dspic33 zu nehmen mit zwei CAN Modulen. Da gibts beliebig viele. Dann nimmst du dir den Beispielcode von Microchip für zwei CAN Module, verbindest die und bist schon fast fertig. Damit hast du schnelle Erfolgserlebnisse und kannst danach filter und sowas dazubauen. Aber du musst nicht auf meinen Rat hören, ich finde es immer lustig wenn sich Leute das Leben schwer machen und dann hier jammern.
Rudolph schrieb: > Für ein Gateway ist ein Controller mit floating point wohl auch nicht > die schlechteste Wahl. Für was genau braucht man bei einem CAN Gateway eine FPU? Ich glaube es gibt bisher noch nicht viele die bei der Arbeit mit CAN float gebraucht haben. Würde mich jetzt echt mal interessieren.
Antwortgeber schrieb: > 2. Musst du zwei CAN Controller über SPI ansteuern, das ist deutlich > schwerer als einfach einen Controller zu programmieren der beides intern > hat. Warum meinst Du heisst der µC AT90CAN? Der hat schon einen, aber eben nur einen internen CAN-Controller. :-) Was aber nichts daran ändert, dass der per SPI angebundene MCP eine Krücke ist. Antwortgeber schrieb: >> Für ein Gateway ist ein Controller mit floating point wohl auch nicht >> die schlechteste Wahl. > > Für was genau braucht man bei einem CAN Gateway eine FPU? > Ich glaube es gibt bisher noch nicht viele die bei der Arbeit mit CAN > float gebraucht haben. Würde mich jetzt echt mal interessieren. Mein Job ist eigentlich Hardware-Entwickler im Automobil-Bereich, dabei decke ich aber im unteren Bereich auch schon mal Projekte mit eigener Software auf kleinen Controllern ab. Unsere "richtigen" Steuergeräte verwenden 32 Bit Controller von Freescale, Renesas oder Infineon und auf denen arbeiten unsere Software-Entwickler mit Matlab-Simulink oder auch Autosar. Ein CAN-Gateway braucht man zum Beispiel in der Entwicklung wenn man Steuergeräte verschiedener Fahrzeug-Plattformen miteinander kombinieren will. Und da ist es laut unseren Software-Entwicklern von Vorteil wenn man grosse Parameter-Sätze mit Floating-Point umrechnen kann. Dagegen ist der Level der hier normalerweise so läuft und auf dem ich selber bei der Software mitspiele nur Spielzeug.
@Antwortgeber: Keine Sorge eine LED hab ich schon mal blinken lassen ;-) Es ging um die Steuerung von CAN-Modulen. Falls es wirklich so schwer ist einen (keine zwei) CAN-Module per SPI anzusprechen werde ich wohl auf einen µC mit zwei CAN-Modulen setzen. Ein bisschen weniger Sarkasmus und das wäre des beste Antwort bisher gewesen ;-) Das Problem ist nämlich nicht dass ich nicht programmieren oder ein Schaltplan erstellen kann. Das Problem ist für mich zu wissen welche Komponenten gibt es und welche davon sind für die Aufgabenstellung geeignet bzw. welche weniger. Dann geht es gleich weiter... Welche von den ganzen Funktionen der Komponenten brauche ich, welche nicht. Mit solchen Dingen habe ich zu kämpfen, da mir einfach das praktische Wissen und die praktische Erfahrung fehlt. Deshalb bin ich über jede Hilfe froh, die ich in dieser Hinsicht bekomme. Mit freundlichen Grüßen Bruno Kempf
Rudolph schrieb: > Warum meinst Du heisst der µC AT90CAN? Ok, das macht leicht besser (geschätzt 8%) > Und da ist es laut unseren Software-Entwicklern von Vorteil wenn man > grosse Parameter-Sätze mit Floating-Point umrechnen kann. OK, verstehe. Das hat aber ja nichts mit dem CAN Gateway zu tun. Ein Gateway leitet ja nur Nachrichten nach betimmten Regeln weiter. Wenn dann natürlich die funktionalität noch soweit erweitert wird dass zwischendrin auch mal Daten umgerechnet werden ist das was anderes. Das Denken deiner Softwerker stammt aber sicher daher, dass die zum programmieren kein Texteditor sondern Simulink benutzen. Hat ja seine Berechtigung, aber für alle die hier unterwegs sind gilt: CAN läuft maximal mit 1 MBaud/s, da kommen keine so großen Datenmengen dass man da Probleme mit dem Rechnen bekommen würde.
Bruno Kempf schrieb: > Ein bisschen weniger Sarkasmus Das du es erkannt hast lässt dich schon mal in die nächste Liga aufsteigen ;-) Wenn du dich für meinen Vorschlag interessiert hier noch Infos: - Controller wurde im Parallelthread schon der kleinstmögliche genannt: Beitrag "Re: CAN Gateway mit PIC" Der ist allerdings relativ neu. - Wenn du einen willst der seit Jahren bewährt und gut verfügbar ist: dsPIC33FJ64GP706A, dsPIC33FJ64GP708A, dsPIC33FJ64GP710A - Code für den Einstieg http://embeddedcodesource.com/developer/microchip_technology_59/ce034__can_loopback
Antwortgeber schrieb: > OK, verstehe. Das hat aber ja nichts mit dem CAN Gateway zu tun. Ein > Gateway leitet ja nur Nachrichten nach betimmten Regeln weiter. Ein Gateway ist kein Switch. :-) Wenn man zwei Steuergeräte verbinden will die sich normalerweise nicht verstehen kann man nicht darauf hoffen, dass einfach nur die IDs verdreht werden müssen. Man muss schon damit rechnen, dass die transportierten Information woanders und auf andere Art und Weise verpackt sind. Und wenn man noch mehr Spass hat muss das Gateway auch noch eine Restbus-Simulation machen, also CAN-Teilnehmer simulieren die real garnicht da sind.
Danke nochmal an alle, die sich die Mühe gemacht haben zu antworten. Jetzt habe ich einen groben Überblick über die µController und werde (vielleicht gleich am Wochenende) einen neuen Schaltplan mit dem AT32UC3C0128C (http://www.atmel.com/devices/AT32UC3C0128C.aspx) entwerfen. Der Link mit dem Code für den Einstieg wird sich wahrscheinlich auch noch als nützlich erweisen. Erst mal werde ich noch ein bisschen mit der Hardware beschäftigt sein -.- Sobald ich dann mit der Software anfange werde ich nochmal um eure Hilfe bitten :-) Gerade das mit den Bootloadern ist mir noch nicht ganz klar. Welchen brauche ich? usw. Aber noch eine andere Frage: Optional (d.h. falls das Praxissemester nicht schon vorbei ist) soll ich noch eine Hardware-Komponente vorsehen die eine Botschaftsmanipulation ermöglicht. Dabei sollen durch die Botschaftsmanipulation Fehler in der CRC-Summe sowie Bit-Stuffing Fehler erzeugt werden können. Ich habe bisher noch nicht so viel Gehirnschmalz in diese Aufgabe gesteckt, da ich mich erst mal auf das Wesentliche konzentrieren will (reicht auch für den Anfang finde ich :-D). Aber ich bin mir sicher das ihr ein paar Anregungen/Ideen habt, wie so eine Hardware ungefähr aussehen könnte. Mit freundlichen Grüßen Bruno Kempf
Bruno Kempf schrieb: > falls das Praxissemester nicht schon vorbei ist Mach dir keine Gedanken darüber. Ich kann dir garantieren, dass du das nicht auch noch während des Praxissemesters schaffst. Deine eigentliche Aufgabe ist schon Taff.
Bruno Kempf schrieb: > einen neuen Schaltplan mit dem > AT32UC3C0128C (http://www.atmel.com/devices/AT32UC3C0128C.aspx) > entwerfen. Warum nimmst Du keinen AT32UC3C2* wenn die Wahl schon auf AVR32 gefallen ist? 144 Pins scheint für ein Gateway leicht übertrieben zu sein. :-) So oder so, AVR32 ist hier ein wenig exotisch, wenn Du was davon posten kannst, immer her damit. :-)
Bitte melde dich an um einen Beitrag zu schreiben. Anmeldung ist kostenlos und dauert nur eine Minute.
Bestehender Account
Schon ein Account bei Google/GoogleMail? Keine Anmeldung erforderlich!
Mit Google-Account einloggen
Mit Google-Account einloggen
Noch kein Account? Hier anmelden.