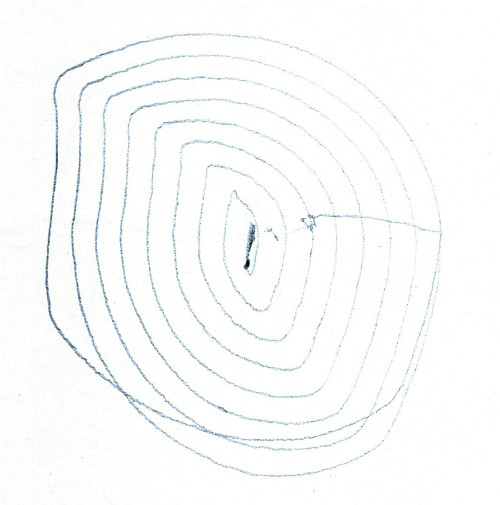
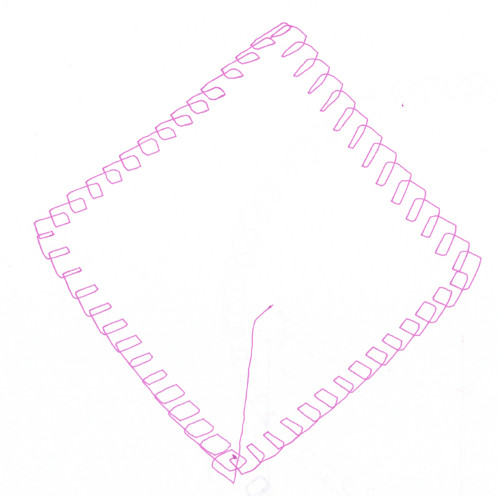
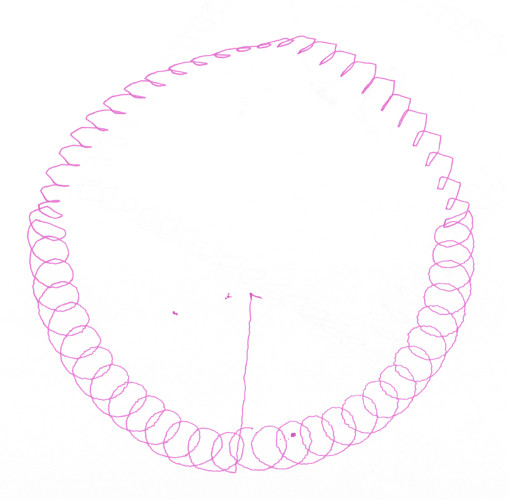
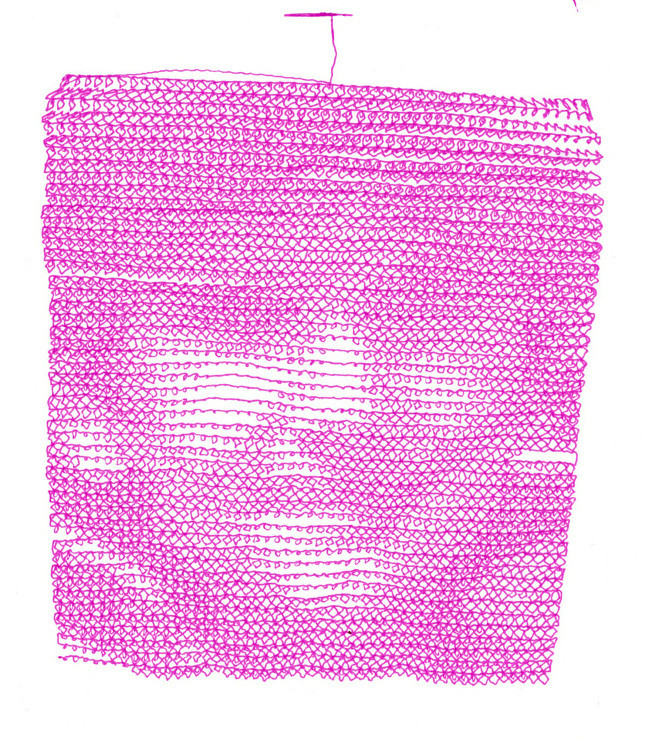
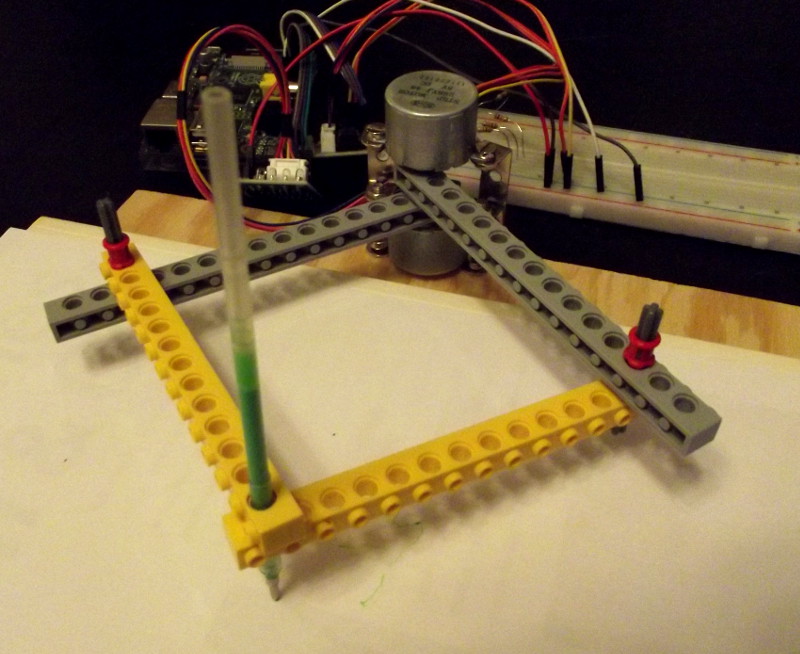
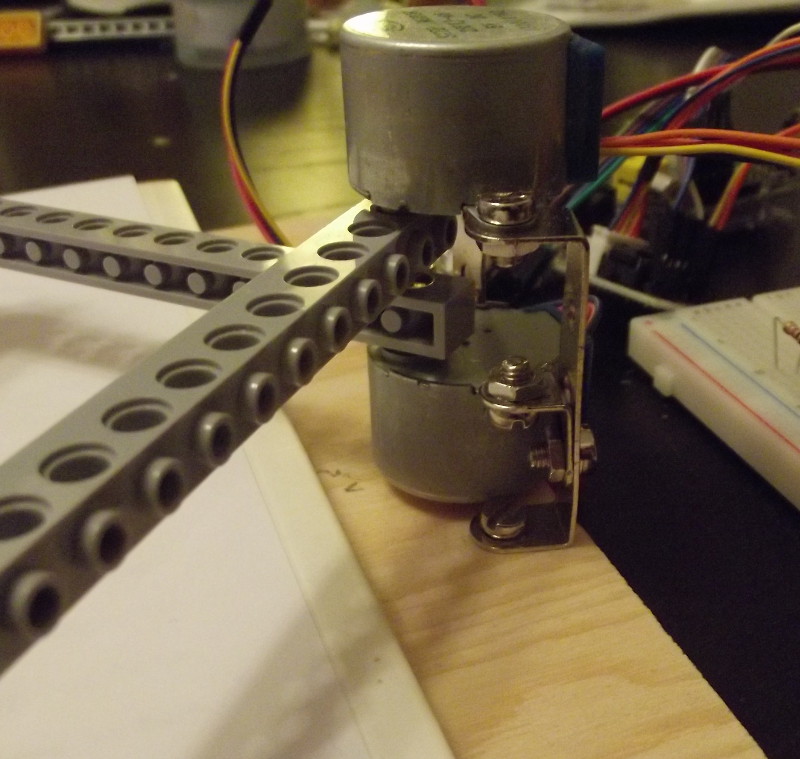
Huhu, ich hatte mir vor ner Weile mal nen Dreier-Pack von diesen Steppern mit ner kleinen Platine zur Ansteuerung mit nem ULN2003A gekauft, beworben werden diese öfters für den Arduino. Man findet zwar viele Beschreibungen zu dieser Motoren, so richtig scheint aber niemand was damit gemacht zu haben, jedenfalls habe ich noch kein Projekt damit gefunden. Das letzte lange Wochenende war für mich dann ein Anlass, endlich mal was mit diesen Motoren zu machen. Ich fing damit an, erstmal zu Hause was zu suchen, was ich auf die Achsen stecken konnte. Für Fischertechnik war der Durchmesser zu groß, was ich dann beim Lego meines Kindes fand, waren Lego-Technik-Stangen, deren Lochdurchmesser ideal war, um auf die Achsen gesteckt zu werden. Ich entsann mich noch dunkel, mal ein Video gesehen zu haben, wie jemand sich was pantografenartiges zum Zeichnen mit zwei Motoren gebaut hatte, und wollte mir auch sowas bauen. (wie sich herausstellte, war das die Plotclock, siehe auch www.mikrocontroller.net/topic/332727). Zum Befestigen der beiden Motoren habe ich mir Teile aus einem Metallbaukasten gesucht, mit Vorbohren passten die Metallschrauben auch gut ins Holz der Grundplatte. Um das Ganze von der Umrechnung der gewünschten XY-Koordinaten in Winkel einfach zu halten, bildet das Ganze eine Raute mit den Motoren übereinander am einen Ende und dem Stift am anderen Ende. Nutzte zuerst ne Bleistiftmine, später dann eine Gelschreibermine. Programmiert habe ich die Ansteuerung auf meinem Raspberry, ein Python-Programm steuert über 8 GPIO-Pins die beiden Motoren, wenn ich von einer Position zur nächsten will, zerlegt mir der gute, alte Bresenham-Algorithmus den Weg in Einzelschritte des Motors. (Da das in Motorwinkeln geschieht, werden lange Strecken dann eher Bögen, also sollten diese nicht zu lang werden.) Das Steckbrett im Hintergrund brauche ich nur, um die Versorgungsspannung vom Raspberry zu verteilen. Das größte Problem war anfangs das große Spiel, nicht so sehr der Legostangen, sondern das der Stepper, deren Achsen sich doch schon ein ganzes Stück einfach so hin- und her bewegen ließen, dieses Spiel musste der Plotter bei einem Richtungswechsel immer erstmal überwinden, dem entsprechend eierig sahen meine erste Versuche, eine Spirale oder andere Dinge zu zeichnen aus. Mir kam dann als Idee, das Ganze etwas unter Spannung zu setzen und probierte es mit einem Gummi von Motorende bis zur Spitze gespannt. Das funktionierte prima, wenn die Raute gestreckt war, allerdings dann natürlich nicht mehr, wenn der Stift nahe bei den Motoren ist und das Gummi durchhängt, was gut am 3. Bild zu sehen ist. Bei zu viel Spannung wiederum streikten die Motoren. Was dann gut klappte, war das Teil fast senkrecht zu betreiben, so sorgt das Gewicht der Arme für die nötige Spannung. Ein Foto zu zeichnen, das ich vorher auf die Auflösung von 50x50 Pixeln brauchte, klappte schon ganz gut, jedes Pixel wird durch eine kleine einfach oder doppelte Raute dargestellt, deren Größe von der Helligkeit abhängt. Was ich faszinierend fand, auch wenn die Linien alle etwas krumm waren, so war mein Teil doch so genau, dass es Linienzüge ganz genau wiederholen konnte und dabei auch jede Ungenauigkeit mit jeder Wiederholung mitmachte, vorausgesetzt, er bumste mit den Armen nicht irgendwo an und war gut eingestellt, durch die Befestigungsschrauben können die Arme leider nicht nach hinten, was die Zeichenfläche etwas einschränkt. Der Programmcode ist noch etwas zu krude, um ihn gleich hier zu veröffentlichen, ich räume ihn etwas auf und kommentiere ihn noch . Was jetzt natürlich noch fehlt, ist die Möglichkeit, den Stift heben und wieder senken zu können, ich denke, ich werde die Motoraufhängung irgendwie kippbar gestalten und da noch den 3. Motor dranhängen.
Angehängte Dateien:
-

spirale1.jpg
49 KB -

raute.jpg
34 KB -

kreis2.jpg
39 KB -

kind.jpg
380 KB -

plotter_vorn.jpg
120 KB -

plotter_detail.jpg
130 KB
Ich finde das auch gut, was sie hier gebaut hat. Die Mechanik ist ein wenig "lawede", aber sie hatte am Wochenende nichts Anderes dafür. Zum Heben des Stiftes könnte man eventuell ein Relais mit Klappanker mißbrauchen. Das Senken besorgt das Eigengewicht des Stiftes. MfG Paul
Sabine W. schrieb: > Was ich faszinierend fand, auch wenn die Linien alle etwas krumm waren, > so war mein Teil doch so genau, dass es Linienzüge ganz genau > wiederholen konnte und dabei auch jede Ungenauigkeit mit jeder > Wiederholung mitmachte ;) bei der Plotclock hat mich das auch schon fasziniert. Wird vorallem dann problematisch wenn man von entgegengesetzten Richtungen aus kommend den Selben Punkt wieder treffen will. Hast du noch paar infos zu den Steppern und den Steppertreiber? Die Winkelauflösung schaut bei deinen Versuchen ja schonmal ordentlich aus. Ansonnsten klasse Projekt!
Ich finde das auch toll. Lego wird sinnvoll verwendet, Kinder lernen etwas und man selbst bekommt Gefühl für stabile Konstruktionen. Hier wackelt halt noch alles;-). Weiter so!
Angehängte Dateien:
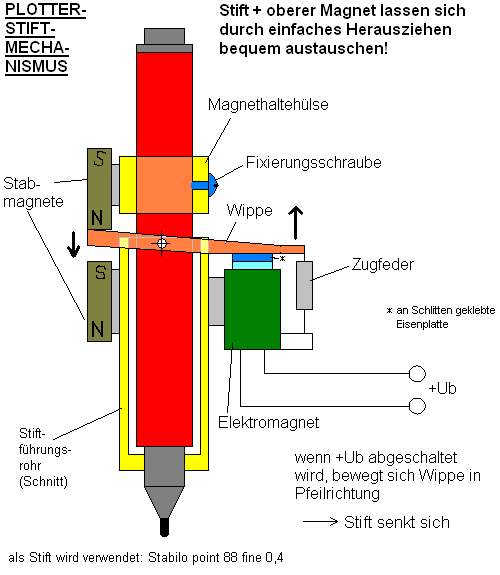
Diesen Absenkmechanismus kann ich für Plotterstifte wärmstens empfehlen! Auch der Tausch von Stiften/Farben ist denkbar einfach. Zitat aus dem Beitrag Beitrag "Plotterstift - Absenkungsmechanismus bauen" "Der Stift wird durch (Dauer-) Magnetkräfte in Position gehalten. Auch wird er durch die Magnetkraft der Dauermagnete abgesenkt, wenn die Wippe sich bei Stromabschaltung hebt. Die Zugfeder tariert dabei gegen, was dazu führt, dass der Stift sehr sanft aufgesetzt wird. Weil der Stift nur durch die Dauermagnete festgehalten wird, kann man ihn nach Benutzung einfach mit ein wenig Kraft aus dem Führungsrohr ziehen und die Kappe zum Verschließen aufsetzen. Auf ähnliche Weise lassen sich auf einfache Art die Stiftfarben austauschen."
Hallo Sabine, Ich gehe derzeit in eine Elektronikschule und mache ein ziemlich ähnliches Projekt. Aber ich weiß nicht wie ich den Schrittmotor ansteuere also z.B wie ich ihn nach rechts oder links drehe. Würde mich um Hilfe freuen. MfG Daniel Luger
Abgesehen davon, dass Du einen alten Beitrag rausgekramt hast und Sabine Dir wahrscheinlich nicht mehr antworten wird: Von diesen kleinen Stepper Motoren habe ich auch einige. Das Drehmoment bei Ansteuerung über die mitgelieferten ULN2003A Boards und Betrieb an 5 Volt ist absolut enttäuschend. Abhilfe habe ich durch Verwendung von besseren Stepper Driver Boards: http://www.ebay.de/itm/Geeetech-A4988-Stepper-Motor-Driver-Module-Reprap-Stepper-Driver-Board-Heat-Sink-/351378108398?pt=LH_DefaultDomain_77&hash=item51cfc46fee und 12V Versogung für die Stepper geschaffen. Damit entwickeln die kleinen Schrittmotore ein erstaunliches Drehmoment. Der zusätzliche Vorteil ist die Vereinfachung der Ansteuerung. Du braucht jetzt pro Achse nur noch ein Schritt- und Richtungs-Signal, welches Du direkt vom Mikroprocessor auf die Driver-Boards gibst. Übrigens gibt es die obigen Boards oder ähnliche auch hier bei uns, allerdings etwas teurer.
Das Problem beim ULN ist die hohe UCE_SAT Spannung. Schon einfache Transistoren sind da deutlich besser. Und es gibt diese Stepper für 5V und 12V. Bzw. unterscheidlichen Spulenwiderständen. Also aufpassen das der nicht durchheizt. Dann ist der Billig-Stepper auch noch unipolar verschaltet. Für eine Ansteuerung mit dem A4988 Schrittmotortreiber muss der Motor umgebaut werden, da der Mittelabgriff beider Spulen am Motor fest verbunden ist. Der Umbau ist aber und schnell erledigt. Der hier hat das beschrieben: http://www.jangeox.be/2013/10/change-unipolar-28byj-48-to-bipolar.html
Bitte melde dich an um einen Beitrag zu schreiben. Anmeldung ist kostenlos und dauert nur eine Minute.
Bestehender Account
Schon ein Account bei Google/GoogleMail? Keine Anmeldung erforderlich!
Mit Google-Account einloggen
Mit Google-Account einloggen
Noch kein Account? Hier anmelden.