Ich soll in einem Projekt ein Mega 2560 R3 benutzen: http://arduino.cc/en/Main/ArduinoBoardMega2560 Nachdem ich das Referenz-Design in EAGLE geöffnet habe, frage ich mich allerdings, ob die das Ernst meinen und ob das Ding überhaupt stabil läuft wenn man als erste Aktion den Bootloader killt und direkt in C darauf programmiert. - 351 Fehler im DRC, eine offene Luftlinie - zwei 100nF für fünf VCC Anschlüsse von denen C6 nur bedingt was macht und C5 einfach nur sinnlos angebunden ist - C3 zur Stabilisierung von ARef ist einige cm und zwei VIAs vom Pin weg - statt Quarz ist da ein Keramik-Resonator dran der unnötig weit weg vom Controller sitzt und dessen GND-Anschluss unmotiviert an das umliegende GND-Polygon angeschlossen ist - ISP Leitungen sinnlos um das halbe Board gewickelt und die abgehenden SPI-Leitungen haben keine Widerstände Ich hoffe gerade, dass die Boards die ich dann in ein paar Tagen erhalten werden nicht so aussehen. Ich will damit zwei Motor-Treiber ansteuern, das braucht zwei PWMs bis 20kHz, ein paar Ausgänge, ein paar Eingänge, zwei ADCs. Und irgendwie ist mir bei der Planung der Pins etwas flau im Magen mit dem Board auf dem Bildschirm.
Bootloader (killen) und programmieren haben nicht sehr viel miteinander zu tun. Der Bootloader sollte, aufgrund der Häufigkeit der Anwendung praktisch fehlerfrei sein. Trifft das aber auf dein Programm nicht zu, so ist es völlig egal, wie es in den Flash-Speicher gekommen ist. Da der Bootloader im Normalbetrieb auch nicht am Programmlauf beteiligt ist ist die Frage: "Läuft das stabil" - Unsinn.
Amateur schrieb: > Bootloader (killen) und programmieren haben nicht sehr viel > miteinander > zu tun. > Der Bootloader sollte, aufgrund der Häufigkeit der Anwendung praktisch > fehlerfrei sein. Er will direkt programmieren (mit C) und den Arduino-Bootlader NICHT benutzen. Deswegen >> "wenn man als erste Aktion den Bootloader killt und direkt in C >> darauf programmiert." > > Trifft das aber auf dein Programm nicht zu, so ist es völlig egal, wie > es in den Flash-Speicher gekommen ist. > > Da der Bootloader im Normalbetrieb auch nicht am Programmlauf beteiligt > ist ist die Frage: "Läuft das stabil" - Unsinn. Hast du den Beitrag eigentlich gelesen? Die Punkte, die er alle angeführt hat? Hier geht es um die Platine und nicht um seine Programmierfähigkeiten.
Ja, und was für eine Platine meint er? Wenn er sich den Arduino Mega besorgt - ja der läuft. Wenn er sich selbst was bastelt - ja kümmer dich drum, dass es läuft.
Harald schrieb: > Ja, und was für eine Platine meint er? Die, die er verlinkt hat. http://arduino.cc/en/Main/ArduinoBoardMega2560 > Wenn er sich den Arduino Mega besorgt - ja der läuft. > Wenn er sich selbst was bastelt - ja kümmer dich drum, dass es läuft. Er hat das Reference Design im Eagle geöffnet und nix selber gebastelt. Liest denn hier keiner mal, was geschrieben wird?
@EnnPehEnn Da die Foren nicht alle vollgestopft sind mit Posts wie "Meine Arduino-Hardware macht Probleme" - ich selber vier verschiedene verwendet habe - gehe ich mal davon aus, dass die Dinger "laufen". Natürlich schließt das nicht aus, dass beim "Arduino Mega 2560 R3", den ich nicht kenne, alles ganz anders ist.
Na was will er? Wissen ob eine etablierte Schaltung lauft? Das routing neu machen und nachbauen? Btw der original arduino mega hat einen quarz drauf...
Und vor allem. Was hat das routing mit dem bootloader zu tun. Und was hat der bootloader mit dem programmieren in c zu tun. Was ist die Frage?
Hmm, vielleicht sollte ich das nächste Mal langsamer tippen?
Mag ja sein, daß er läuft. Nachdem ich das Layout angesehen habe, bin ich aber der Meinung, daß das eher Zufall ist. Darüber können auch die schön parallel verlegten Leiterzüge nicht hinwegtäuschen. Sieht natürlich sehr professionell aus (auf den ersten Blick). Aber die angesprochenen Punkte sind wirklich zu kritisieren. Bis auf die 351 Fehler, das sind zum größten Teil Abstandsfehler, die am Mega2560 auftreten, weil die Design-Rules nicht auf den kleinen Pitch konfiguriert sind. Die Luftlinie ist in der Tat vorhanden. Und auch der weit entfernte C an Aref. Mir gefällt das Layout jedenfalls auch nicht. Da würde ich noch ein paar Stunden reinstecken, wenn ich es bauen müßte. Aber wie gesagt, es scheint zufälligerweise zu laufen, was solls...
Angehängte Dateien:
-

arduino_reset.jpeg
340 KB
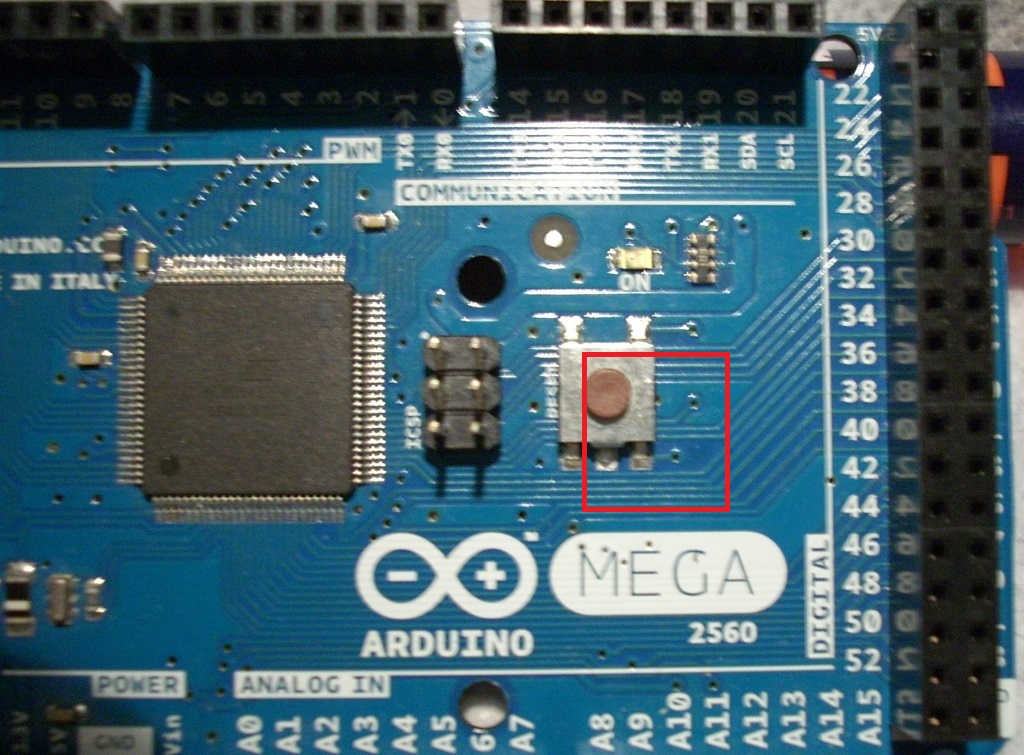
Rudolph schrieb: > Ich soll in einem Projekt ein Mega 2560 R3 benutzen: > http://arduino.cc/en/Main/ArduinoBoardMega2560 Wer zwingt dich denn zu sowas? > Nachdem ich das Referenz-Design in EAGLE geöffnet habe, frage ich mich > allerdings, ob die das Ernst meinen und ob das Ding überhaupt stabil > läuft wenn man als erste Aktion den Bootloader killt und direkt in C > darauf programmiert. Klar tut es das, du wärst nicht der erste, der das so macht. Kleiner Tipp: wenn du eh an den Fuses rumänderst um den Bootloader restlos loszuwerden schau sie dir alle an. Brownout z.B. steht nur auf 2,7 V. Das würde ich bei 8MHz ja noch verstehen aber bei 16 MHz?! > - 351 Fehler im DRC, eine offene Luftlinie Ich halte einen Mega2560 RC3 in den Händen. Auf der Platine ist das Pad mit der Luftlinie ordnungsgemäß angebunden. siehe Bild Die 351 Fehler sind nicht kritisch, hast du sie dir mal angesehen? Clearance-Fehler an den Pins des Mega2560? DRC falsch eingestellt... Drill-Distance-Fehler? DRC falsch eingestellt... Width Fehler überwiegend an der +5V Leitung? Nur eine Netzklasse für Versorgungsspannung definiert... und der kleine 16U2 braucht nun wirklich keine 30 mil an der Versorgung... > SPI-Leitungen haben keine Widerstände Falls du dir eine eigene Adapterplatine (neudeutsch: "Shield") baust, ist es ja kein Problem Serienwiderstände mal eben mit draufzusetzen. Ermöglicht dir sogar den Spaß Wellenwiderstände konkret zu berechnen und entsprechend Werte auszuwählen falls du so hardcore drauf bist. > Ich hoffe gerade, dass die Boards die ich dann in ein paar Tagen > erhalten werden nicht so aussehen. Wenn es originale Arduinos sind anscheinend mit kleinen Änderungen (siehe oben) wohl doch. > Ich will damit zwei Motor-Treiber ansteuern, das braucht zwei PWMs bis > 20kHz, ein paar Ausgänge, ein paar Eingänge, zwei ADCs. > Und irgendwie ist mir bei der Planung der Pins etwas flau im Magen mit > dem Board auf dem Bildschirm. Wird funktionieren... Edit: Achso ja und nen Quartz ist da auch drauf an besagter Stelle aus dem Layout, aber davon mach ich jetzt nicht auch noch nen Bild...
Rudolph schrieb: > <snip>...<snip> Er schrieb nichts dazu: Rudolph schrieb: > - zwei 100nF für fünf VCC Anschlüsse von denen C6 nur bedingt was macht > und C5 einfach nur sinnlos angebunden ist Und da hätte ich dann doch Bedenken, daß das so stabil läuft. Oliver
Bernhard F. schrieb: > Wer zwingt dich denn zu sowas? Zeitdruck, nicht meine Schuld oder die von meinem Projektleiter, aber ich habe leider nichts passendes "in der Schublade" -> ganz oben auf der To-Do Liste. >> ob das Ding überhaupt stabil >> läuft wenn man als erste Aktion den Bootloader killt und direkt in C >> darauf programmiert. > > Klar tut es das, du wärst nicht der erste, der das so macht. Oh, dass es grundsätzlich geht ist klar, ich meinte mehr so ob mir das Ding nicht abschmiert wenn ich auch nur ansatzweise versuche die Fähigkeiten des Controllers auszunutzen. > Kleiner Tipp: wenn du eh an den Fuses rumänderst um den Bootloader > restlos loszuwerden schau sie dir alle an. > Brownout z.B. steht nur auf 2,7 V. Das würde ich bei 8MHz ja noch > verstehen aber bei 16 MHz?! Ja, okay. :-) Und JTAG einschalten. >> - 351 Fehler im DRC, eine offene Luftlinie > > Ich halte einen Mega2560 RC3 in den Händen. Auf der Platine ist das Pad > mit der Luftlinie ordnungsgemäß angebunden. siehe Bild Die beiden Kondensatoren oben Links sind im Referenzdesign auch nicht da. > Die 351 Fehler sind nicht kritisch, hast du sie dir mal angesehen? Ja, hab ich, das war ja auch ohne Bewertung und ich wollte nur andeuten, mit wieviel Hingabe das Board erstellt wurde. Die Fehler im ERC habe ich ja nichtmal erwähnt. :-) >> SPI-Leitungen haben keine Widerstände > > Falls du dir eine eigene Adapterplatine (neudeutsch: "Shield") baust, > ist es ja kein Problem Serienwiderstände mal eben mit draufzusetzen. > Ermöglicht dir sogar den Spaß Wellenwiderstände konkret zu berechnen und > entsprechend Werte auszuwählen falls du so hardcore drauf bist. Ja gut, das fällt eigentlich eher unter System-bedingtes Problem, genauso wie ja auch Null Schutz der Pins vorgesehen ist. >> Ich hoffe gerade, dass die Boards die ich dann in ein paar Tagen >> erhalten werden nicht so aussehen. > > Wenn es originale Arduinos sind anscheinend mit kleinen Änderungen > (siehe oben) wohl doch. Kleine Änderungen bedeuten wenigstens, dass es jemanden kümmert. >> Ich will damit zwei Motor-Treiber ansteuern, das braucht zwei PWMs bis >> 20kHz, ein paar Ausgänge, ein paar Eingänge, zwei ADCs. >> Und irgendwie ist mir bei der Planung der Pins etwas flau im Magen mit >> dem Board auf dem Bildschirm. > > Wird funktionieren... Dann aber Respekt an Atmel...
Bernhard F. schrieb: > Edit: Achso ja und nen Quartz ist da auch drauf an besagter Stelle aus > dem Layout, aber davon mach ich jetzt nicht auch noch nen Bild... In Deinem Bild sieht man doch den Resonator. Auf den USB-Teil bin ich nichtmal eingangen, der kann auch zufällig vom Board fallen für meine Anwendung. :-) Aber 22pF sagen eigentlich schon alles, dazu die lausige GND-Anbindung.
Rudolph schrieb: > Und JTAG einschalten. Hab dir da noch was angehangen, was ich dafür mal schnell zusammengetippt hab. Ich hatte nur einen JTAG ICE MK II mit dem 10 Pin Anschluss ohne Adapter zur Verfügung. Ist aber kompatibel zum JTAG ICE 3. Nicht schön, aber selten. Vieleicht erspaart dir die 2. Hälfte vom PDF 5 Minuten Datenblätter wälzen. Rudolph schrieb: > In Deinem Bild sieht man doch den Resonator. Notiz an mich: Denken vor dem Posten... Dem kleinen 16u2 haben sie den Quarz auf dem Board spendiert. Hab mich zwar noch gewundert, warum der so weit vom großen Mega ist aber ja jetzt merk ich es selbst... Da kann man ja fast nen LKW zwischen Resonator und Mega parken so viel Platz ist da... Wah hör auf... ich will da nicht drüber Nachdenken... es läuft...
Rudolph schrieb: >>> ob das Ding überhaupt stabil >>> läuft wenn man als erste Aktion den Bootloader killt und direkt in C >>> darauf programmiert. >> >> Klar tut es das, du wärst nicht der erste, der das so macht. > > Oh, dass es grundsätzlich geht ist klar, ich meinte mehr so ob mir das > Ding nicht abschmiert wenn ich auch nur ansatzweise versuche die > Fähigkeiten des Controllers auszunutzen. Wie gesagt: Du bist nicht der erst der das so macht. Aber du wärst wohl der erste bei dem das Ding abschmiert... Ich benutze neben den Orginalen Arduino-Mega2560 auch china-clone davon, und selbst die funktionieren. Nur damit du ne vorstellung hast was ich damit mache: Alle 4 usart "gleichzeitig" bedienen: senden und empfangen interrupt getrieben (3x 9k6, 1x 38k4) Dazu noch 4 Timerinterrupts 2x pinchange intrrupt 1x ext. Interrupt, ausgelöst durch Tastendruck und noch n bisschen mehr, wie crc-berechnung, in den eeprom schreiben /daraus lesen usw... und ja: das ist ein Programm! Jaja, is noch nicht wirklich "super-duper-mega-hyper-advanced", fällt für mich trotzdem in die Kategorie: "ansatzweise versuche die Fähigkeiten des Controllers auszunutzen". Und das ganze mach ich da sogar noch in Krüppel C/C++ Misch-Masch... und du wirst es nicht glauben, aber das Ding läuft stabieler als ne Oma mit Krückstock ;)
Schau Dich mal hier um: http://www.chip45.com/categories/avr_mikrocontroller_module_boards.php hab davon immer ein paar in der Schublade, wenn ich mal ganz schnell was spezialisiertes brauch.
Angehängte Dateien:
-

5V_Arduino_2560.png
69 KB
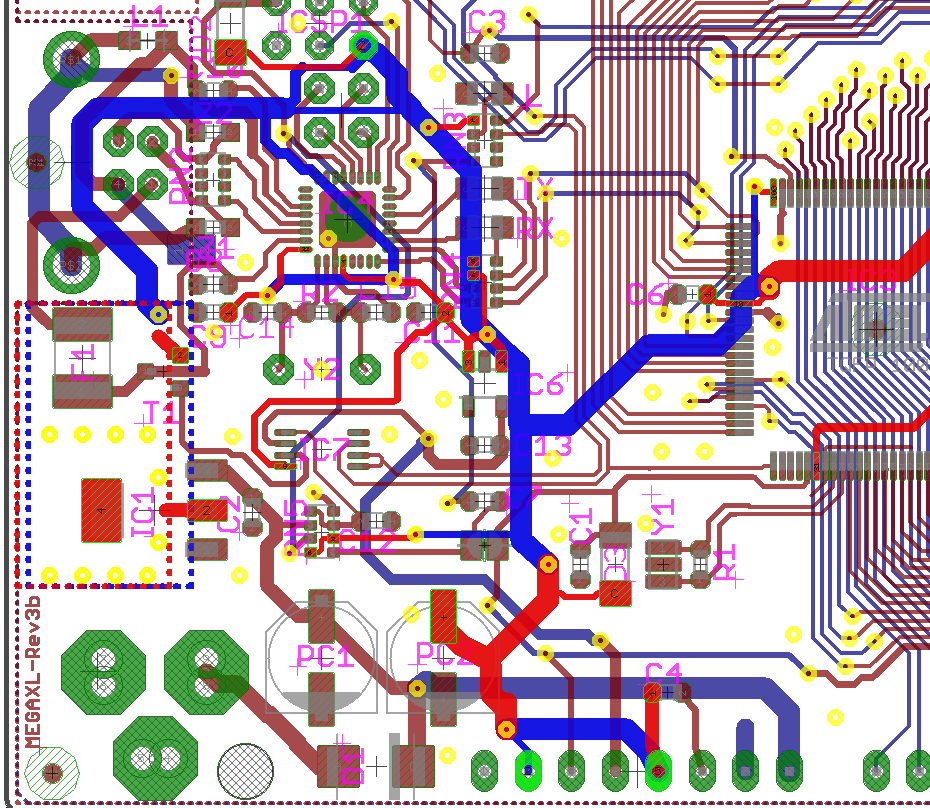
Ich habe die Dinger seit gestern da und erstaunlicherweise laufen die erstmal. Respekt an Atmel! Bei der Versorgung haben wir uns gefragt warum die nur bis 12V funktionieren können soll. Und dabei ist mir das Layout dazu aufgefallen, siehe Bild. Das kann eigentlich garnicht funktionieren, der Regler muss eigentlich sofort anfangen zu schwingen und macht es erstaunlicherweise nicht. Wieso? Weil "IC1" ein LDO ist der am Ausgang einen Low-ESR Kondensator von 33mR bis 2,2R mit mindestens 4,7µ braucht. Blöderweise ist "PC2" nicht so angeordnet, dass der diese Funktion erfüllen könnte. Und ja, das Design entspricht nicht ganz dem Referenz-Design aber der Part ist genauso ausgeführt. Auf diesen Müll werde ich mich nie wieder einlassen.
Rudolph schrieb: > Bei der Versorgung haben wir uns gefragt warum die nur bis 12V > funktionieren können soll. Die zulässige Verlustleistung des Spannungsreglers auf dem Board beträgt ca. 1 Watt, und die 12V-Angabe ist von den Arduino-Machern so spezifiziert, dass man am 5V-Pin des Boards noch etwas Strom entnehmen kann, ohne den Spannungsregler zu überhitzen. Das nackte Board alleine zieht ca. 50 mA. Falls Du am 5V-Pin (und auch am 3.3V-Pin) keinen zusätzlichen Strom entnehmen möchtest, kann die Spannung auch höher sein. Bei beispielsweise 20V Eingangsspannung würde der Spannungsregler ja 15 Volt verbraten müssen. Nach der Formel P=U*I, bzw. I=P/U= 1 Watt / 15 Volt = 66,6 mA könntest Du also das nackte Board (ca. 50 mA) mit 20 Volt Eingangsspannung versorgen und noch zusätzlich 16 mA für irgendeinen angeschlossenen Sensor, ohne dass Du die 1-Watt Verlustleistung für den Spannungsregler überschreitest. Die Arduino-Macher geben nur 12 Volt maximal an, damit man auch mal 100 mA am 5V-Pin ziehen darf.
Das nen LDO Verlust-Leistung produziert war mir schon klar, wenn man weniger Strom braucht verträgt der auch mehr Spannung. Aber wegen der Angabe, dass die Schaltung nur 12V verträgt musste ich genauer hinsehen und das war doch der Grund von meinem Post, das unglaublich schlechte Layout habe ich angeprangert. Strom, ja, nackt hat das Board 76mA gezogen, jetzt gerade bin ich mit Programm auf 14mA runter. Schön sehen die 5V auch nicht aus.
Ich verstehs noch immer nicht. Wenn dir der arduino mega zu schlecht ist mach dir dein Board doch selber!? Ich hatte jedenfalls noch nie Probleme damit. Und wozu sollte man 20V reinjagen wenns 7-9V auch tun?
Harald schrieb: > Ich verstehs noch immer nicht. Lesen würde helfen, steht alles schon oben. > Und wozu sollte man 20V reinjagen wenns 7-9V auch tun? Weil man sich das nicht immer aussuchen kann, der Aufbau wird von einer 12V Batterie gespeist und da soll auch mal ein Ladegerät dran hängen können. Da wären 12V Spannungsfest recht hinderlich. Vor den Dingern kann man eigentlich nur warnen.
Naja, ich würde ein arduino Board auch nicht unbedingt in einem konkreten Projekt verbauen. Eher zum basteln und wenns was konkretes wird eine Platine nach meiner Vorstellung...
Rudolph schrieb: > Lesen würde helfen, steht alles schon oben. Wenn du dir deine Angeberei sparen wuerdest, wuerde das auch helfen. Du bist die gleiche Type wie cybloard: Immer schoen die Klappe aufreissen, aber selbst nichts bieten. Wenn du wirklich so toll bist: Fixe die Fehler im Design und gib's der Arduino-Community als deinen Beitrag. Aber du bist sicher auch einer von denen, die gerne von der Arbeit anderer profitieren, aber nichts zu zurueck geben?
Welche Angeberei denn? Profit? Ja, eine Platine mit Controller drauf, deutlich weniger als ich erwartet habe, wenig mehr als ein Lochraster-Aufbau. Und natürlich voll bezahlt als Original inklusive der nicht benötigten Software dazu. Zurück gegeben habe ich genug indem ich hier auf die Defizite hingewiesen habe, wenn die nicht fähig sind mal ein Datenblatt aufzumachen, dann ist denen leider sowieso nicht zu helfen. Wenn überhaupt müsste ich bis hierhin schon eine Rechnung ausstellen.
Quack+ schrieb: > Wenn du wirklich so toll bist: Fixe die > Fehler im Design und gib's der Arduino-Community als deinen Beitrag. > Aber du bist sicher auch einer von denen, die gerne von der Arbeit > anderer profitieren, aber nichts zu zurueck geben? Da würde er seine Zeit verschwenden. Die Arduino-Community ist ziemlich beratungsresistent. An der Spitze Wichtigtuer die "Design" bei Louis Vuitton gelernt haben - die Art von Design, die nichts mit Elektronik zu tun hat. Die bekommen ja nicht mal zwei Header anständig ausgerichtet. Auf der nächsten Ebene die Propagandisten und Abstauber, ebenfalls Wichtigtuer. Die helfen die Sau ständig weiterhin durchs Dorf zu treiben. Wie die sogenannten Journalisten von Make oder Bastelläden wie Adafruit. Dann die kleineren Lichter, die im wahrsten Sinne des Wortes zeigen wollen was für Leuchten sie sind, indem sie ein paar LEDs blinken lassen. Irgendwo ganz unten dann die bedingungslos Gläubigen, die an die Unfehlbarkeit ihrer Wichtigtuer glauben. Denen kann man nicht mit fachlichen Informationen kommen. Besonders nicht in einer Community, die glaubt man müsse nichts richtig lernen und von der man sich als echter Ingenieur noch beschimpfen lassen muss.
Am lautesten Motzen hier sowieso immer diejenigen, die noch nie im Leben Etwas auf die Reihe bekommen haben...
Bitte melde dich an um einen Beitrag zu schreiben. Anmeldung ist kostenlos und dauert nur eine Minute.
Bestehender Account
Schon ein Account bei Google/GoogleMail? Keine Anmeldung erforderlich!
Mit Google-Account einloggen
Mit Google-Account einloggen
Noch kein Account? Hier anmelden.