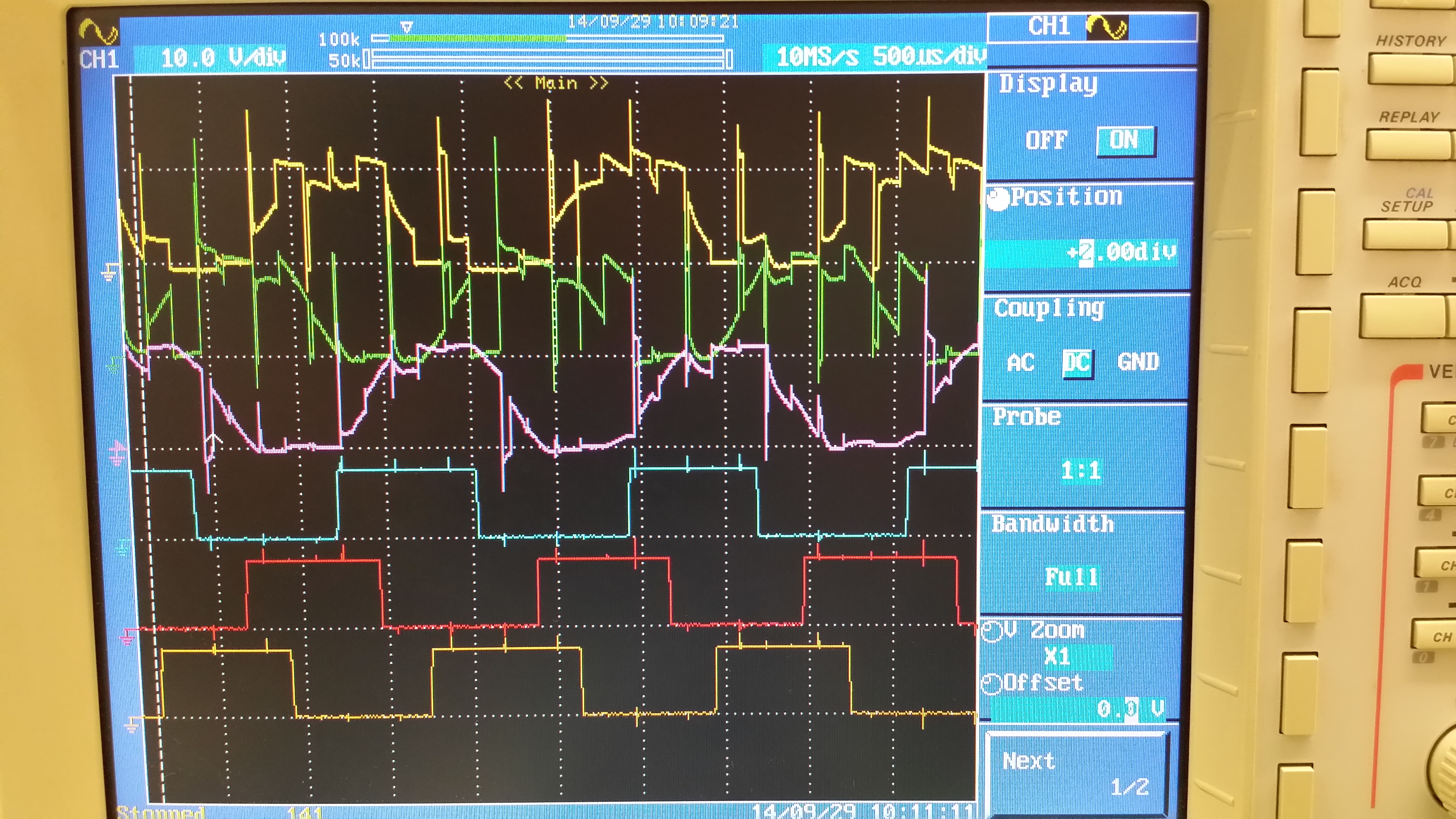
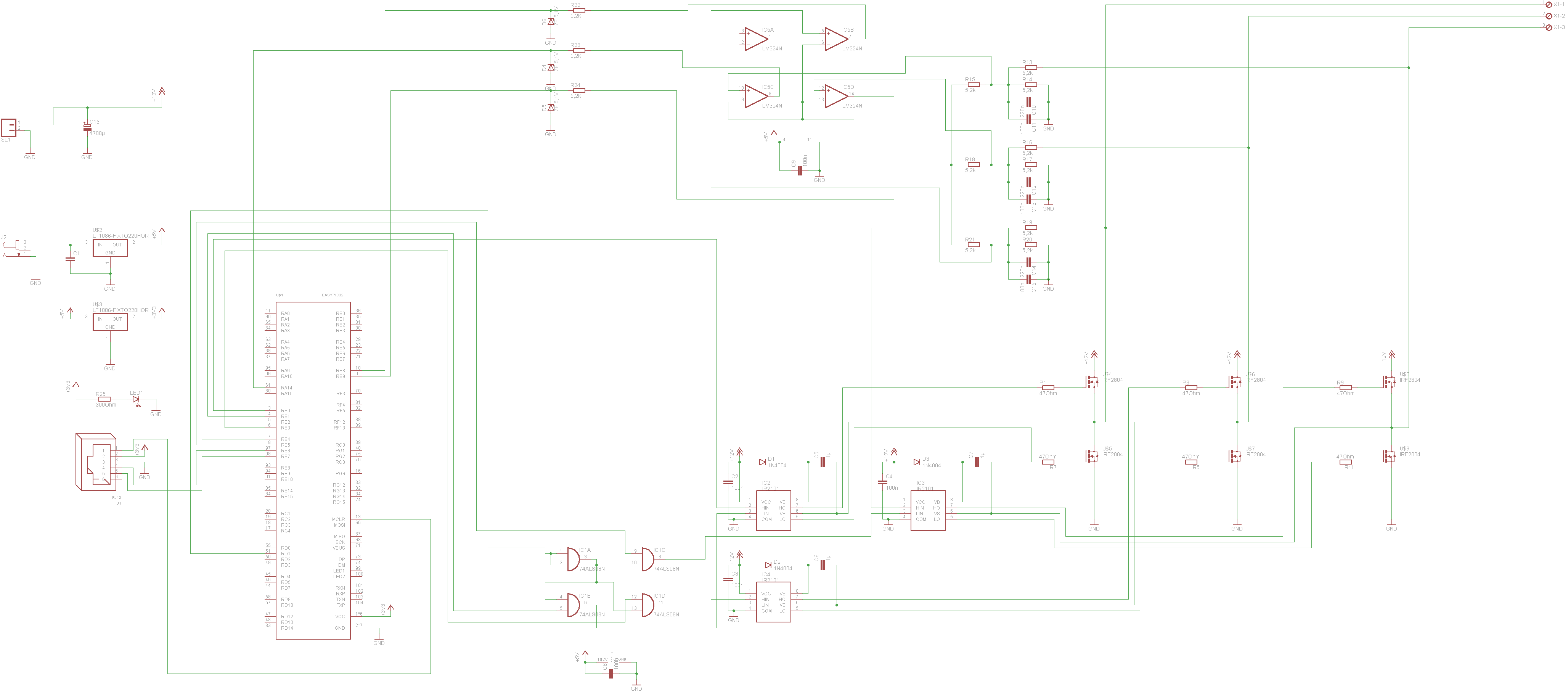
Hi, mein erster Beitrag und gleich ein größeres Problem =D Ich arbeite im Moment an meiner Studienarbeit; es soll ein BLDC-Regler werden und einen Graupner Compact 465Z antreiben. Dieser dreht sich auch schon, nur leider werden nach kurzer Zeit die MOSFETs heiß. Auch das Oszillogramm sieht nicht ganz so wünschenswert aus. Als µP kommt ein PIC32 zum Einsatz. Auf dem Oszi-Bild sind die oberen 3 Graphen die Oszillogramme der Phasen, die unteren 3 sind die HW-Interruptsignale, die der PIC von der BEMF-Schaltung über einen nachgeschalteten Komparator bekommt. Liegt der Fehler in meiner Schaltung oder, wie ich vermute, in der Programmierung des PIC? Hat jemand auf einem PIC32 schon einmal erfolgreich einen BLDC-Regler laufen lassen? Mfg Beon
Angehängte Dateien:
-

20140929_093230.jpg
3,6 MB -

BLDC.png
47 KB
Hallo, Also ich bin jetzt kein Motorexperte. Aber wenn die MOSFETs zu heißt werden spricht das im Normalfall dafür, dass diese nicht schnell genug durchgeschalten werden. Eine Frage noch: Hat der Motor Freilaufdioden eingebaut? Wenn das nicht der Fall ist könnte es sein das durch die Induktivität des Motors einfach eine Überspannung an den MOSFETs induziert wird und diese im Halbleiter überschlägt. In deinem Schaltplan sind keine Freilaufdioden eingezeichnet. Könnte auch die Spitzen in den oberen Graphen erklären. Mir haben die fehlenden Freilaufdioden für eine Transformatoransteuerung mal einige MOSFETs + Treiber gekostet ... grüße, Bernhard
Wo und wie soll denn der Motor Freilaufdioden enthalten? Die gehören natürlich in die H-Brücke, und nicht in den Motor... Jedes DSO sollte übrigens eine Speicherfunktion für den Bildschirm haben. Ich wette, dass das Ergebnis der Speicherung deutlich kompakter ist als ein Handyfoto von der Bildschirmanzeige. (Tip: Das ist ein dezenter Hinweis auf das Thema "Bildformate"). Mit freundlichen Grüßen Thorsten Ostermann
Wobei es sich in diesem Fall nicht um eine H-Brücke handelt. Der Motor hat 3 Anschlüsse und wird somit wohl eher einem Dreieck entsprechen.
Hat der Pic ein eingebautes Totzeit-Glied? Wenn nicht, gibt es bei jedem Umschalten einen Kurzschluss und die MosFETs werden deshalb heiß.
So wie ich das Datenblatt der MOSFET Treiber gelesen habe bauen die ein kurzes Delay zwischen dem Umschalten von Hi- auf Lo-Side ein. Das Problem das bei CMOS auftritt kann es also in diesem Fall nicht sein ...
Beim IR2101 lassen sich der High- und der Lowside FET eigentlich unabhängig voneinander schalten. Wenn du beide gleichzeitig auf '1' hast baust du einen schönen Kurzschluss.
Du hättest lieber VORHER hier fragen sollen. Für solche Zwecke gibt es PICs, die genau dafür gemacht worden sind und die die erforderliche Hardware zum zerstörungsfreien Ansteuern der Halbbrücken eingebaut haben. Diese PICs erkennst Du an den Buchstaben "MC" in der Typenbezeichnung (MotorControl). Schau Dir mal den dsPIC33EP128MC504 an. http://www.microchip.com/wwwproducts/Devices.aspx?product=dsPIC33EP128MC504 Nicht umsonst steht da in der Beschreibung "PWM support for:- Inverters, PFC, Lighting- BLDC, PMSM, ACIM, SRM". Da sind dann auch die ganzen Geschichten wie programmierbare Totzeit etc pp in Hardware drin. Microchip hat auch entsprechende Entwicklungsboards. zB: http://ww1.microchip.com/downloads/en/DeviceDoc/DS-52080a.pdf Danach hättest Du auch mal schauen können. Sowie fertige Bibliotheken. Danach darfst Du selber schauen. fchk
Frank K. schrieb: > Du hättest lieber VORHER hier fragen sollen. > > Für solche Zwecke gibt es PICs, die genau dafür gemacht worden sind und > die die erforderliche Hardware zum zerstörungsfreien Ansteuern der > Halbbrücken eingebaut haben. Diese PICs erkennst Du an den Buchstaben > "MC" in der Typenbezeichnung (MotorControl). Wollte ich auch vorschlagen. Man kann sich eine Menge Arbeit sparen wenn man einen µC nimmt der BLDCs von Haus aus beherrscht. Wir haben damals Wochenlang vergeblich versucht mit einem µC von Infinieon einen BLDC anzusteuern. Dann haben wir die Platine in die Tonne getreten und einen Atmega32M1 genommen. Innerhalb von 2 Tagen lief der Motor rund.. @beon Aus der Schaltung wird so doch keiner schlau. Ohne Beschriftung der Verbindungen ist das nur ein wildes Gewusel von Grünen Linien. So hab ich keinen Nerf das Gewirr bei den Logik-gattern unten in der Schaltung zu entschlüsseln (Die man sich übrigens auch sparen kann wenn man einen dedizierten µC nimmt)
1. Alle HIN und LIN der Treiber direkt mit dem uC verbinden, und die Gatter eliminieren. 2. das PWM generierende Programm gescheit schreiben. Deine Phasenspannungen zeigen eindeutig Probleme mit der Berechnung der PWM. Bevor man richtige Mosfets da kaputt macht, sollte man wirklich erst mit Oszi die HIN und LIN Ausgänge kontrollieren, ob denn nicht doch ein Kurzer gezogen werden könnte.
Vielen Dank erstmal für die Antworten. Ich werde mal mit meinem Professor reden, ob die Studienarbeit mit einem speziellen µC noch erfüllt wäre. Die großen Probleme traten auch erst mit dem "großen" Motor auf, für die ersten Versuche hatte ich einen alten Videorecordermotor, der lief ganz ordentlich. @fabian_f55 Kannst du mir genauer schreiben, was da an Beschriftung hingehört? Bin ja noch am lernen und freue mich, wenn mir jemand sowas erklären kann. @Thorsten Ostermann Das DSO hat schon ein paar Jahre hinter sich, ist ein Yokogawa DL716 mit Diskette... habe es versucht, auf diese zu speichern, leider ohne wirklichen Erfolg. Das DSO speichert i-welche Projekte, ohne richtige Bilddateien... Mfg Beon
Angehängte Dateien:
-

CaptureMain.PNG
18 KB -

CaptureSW.PNG
5,3 KB

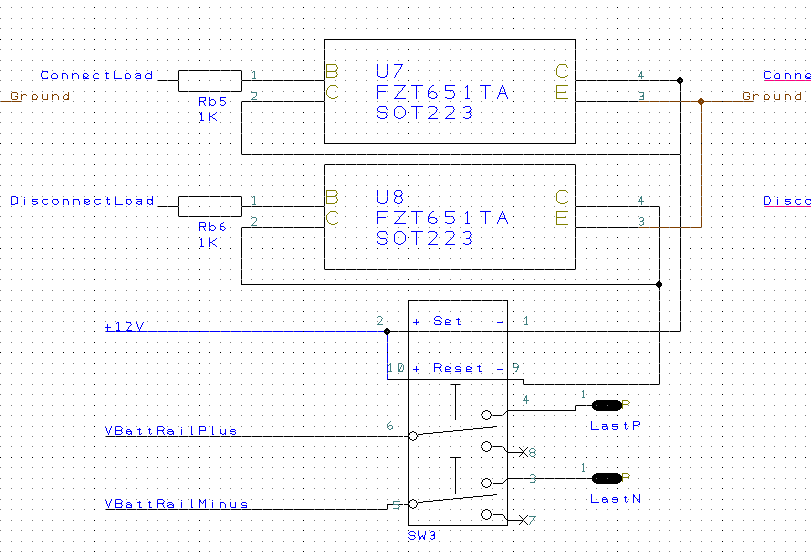
Bei den Layouten gibt es verschiedene Ansätze. Ich vermeide überkreuzende Linien weitgehend indem ich Schaltungen in zusammengehörige Gruppen auftrenne(s.Bilder). Andere Möglichkeit sind "Busse", Also mehrere Linien zu einer Dicken Line zusammenzuführen. Das macht vor allem bei Parallelinterfaces Sinn. Selbst wenn man die Linien nicht unterbrechen möchte, ist es trotzdem hilfreich den Linien Labels zu geben, damit man auf einen Blick sehen kann woher sie kommt, und whohin sie geht. Ein nettes Plus ist, wenn alle Pin am µC die Sonderfunktionen zeigen. Dann muss man nicht jedes mal das Datenblatt rauskramen um zu schauen was der Pin wohl macht. Was das Output-Format angeht: Vernünftige PCB-Programme können verlinkte pdfs ausgeben. Wenn man Auf das Buslabel klickt, springt die Ansicht zum anderen Ende des Signals. Klick einfach mal in dem PDF im Anhang auf SCK am Programmierstecker und schau was passiert. Das ist immens hilfreich für Leute die sich nicht in deiner Schaltung auskennen. Schaut aus als würdest du EAGLE nutzen. Keine Ahnung ob das da auch geht, aber versuchen kann mans ja.
Nachtrag: Farben: Wie man vielleicht erkennen kann, gebe ich Spannung-Rails verschiedene Farben (Auch im PCB). Damit man sie auf einen Blick von Logik unterscheiden kann.
.. und ich wünschte, die Eagle Pläne wären nicht alle so unscharf und luschig. Ich jage sie deswegen durch Irfanview und reduziere sie auf Schwarz/Weiss, und dann wird noch einmal die Schärfe verbessert. Zur Schaltung: 47R sind als Gatewiderstände sehr hoch. Die IRF2804 haben schon eine relativ grosse Gateladung (160nC) und diese muss zügig geladen und entladen werden. Gatewiderstände im Bereich 10-20R sind da angesagt. Die Kapazität der Ladungspumpe ist mit 1µF sehr klein, bedenke, das dieser C seine Ladung ins Gate abgibt und sie vollständig laden muss. 10µF oder 47µF sind da deutlich entspannter und müssen nicht jedesmal komplett aufgeladen werden - dadurch halten sie auch länger. Ach ja, das sollten schon gute C sein, impulsfest und so. Ich baue da 50V oder 63V Typen ein, selbst wenn Vcc nur bei 12V liegt. 1N4004 ist nun wirklich keine gute Diode dafür. Sie hält zwar die Spannung aus, ist aber langsam und hindert die Ladungspumpe am Vollwerden. Nimm BA159 oder was ähnlich schnelles. Als nächstes muss die Motorspannung abgefedert werden. Ich bin nicht sicher, ob du dafür den 4700µF vorgesehen hast. Wenn ja, muss dieser so dicht wie möglich an die Leistungsrail und mit kräftigen Verbindungen angeschlossen sein. Überhaupt sollten die drei Halbbrücken niederohmig ausgelegt sein, damit durch den Motorstrom nicht die gesamte Spannung zusammenbricht.
Matthias Sch. schrieb: > .. und ich wünschte, die Eagle Pläne wären nicht alle so unscharf und > luschig. Ich jage sie deswegen durch Irfanview und reduziere sie auf > Schwarz/Weiss, und dann wird noch einmal die Schärfe verbessert. > Zur Schaltung: 47R sind als Gatewiderstände sehr hoch. Die IRF2804 haben > schon eine relativ grosse Gateladung (160nC) und diese muss zügig > geladen und entladen werden. Gatewiderstände im Bereich 10-20R sind da > angesagt. Die Kapazität der Ladungspumpe ist mit 1µF sehr klein, > bedenke, das dieser C seine Ladung ins Gate abgibt und sie vollständig > laden muss. 10µF oder 47µF sind da deutlich entspannter und müssen nicht > jedesmal komplett aufgeladen werden - dadurch halten sie auch länger. > Ach ja, das sollten schon gute C sein, impulsfest und so. Ich baue da > 50V oder 63V Typen ein, selbst wenn Vcc nur bei 12V liegt. > 1N4004 ist nun wirklich keine gute Diode dafür. Sie hält zwar die > Spannung aus, ist aber langsam und hindert die Ladungspumpe am > Vollwerden. Nimm BA159 oder was ähnlich schnelles. > Als nächstes muss die Motorspannung abgefedert werden. Ich bin nicht > sicher, ob du dafür den 4700µF vorgesehen hast. Wenn ja, muss dieser so > dicht wie möglich an die Leistungsrail und mit kräftigen Verbindungen > angeschlossen sein. Überhaupt sollten die drei Halbbrücken niederohmig > ausgelegt sein, damit durch den Motorstrom nicht die gesamte Spannung > zusammenbricht. Schließe mich meinem Vorredner in jedem Punkt an, mit einer Ausnahme! Der Bootstrap Kondi muss und sollte auch nicht 10µF oder größer sein. Aus 3 Gründen: 1. Die Gate Kapazität eines (Leistungs-) Mosfets reicht üblicherweise vonn ein paar hundert pF bis in den einstelligen nF Bereich herein, liegt auf der Hand das ein Kondi mit mehreren 10µF völlig überdimensioniert ist. Ich benutze immer 1µF Folienkondi (MP) größere Werte ergeben Nachweisbar keine besseren Schaltvorgänge mehr. 2. Wenn der Kondi zu groß ist belastest du die Bootstrap Diode entsprechend stärker und sie könnte durchbrennen 3. Größere Kondis haben längere Ladezeiten, du benötigst schon deine 12V um die Mosfets sicher durchzusteuern. Bei einem zu großen Kondi läufst du gefahr das sich der Kondi nicht vollständig aufgeladen hat und du das Gate dann nur mit 5V ansteuerst. Dann wirkt der Mosfet u.U. wie ein Widerstand und wird heiß. Mir fallen noch mehr Gründe ein wie Größe/Preis aber das waren jetzt die wichtigsten Punkte Achja die BA159 ist mit ihren 250ns doch schon sehr Träge, würde dir eher die UG2B-E3/54 empfehlen (15ns/60A Spitze) und günstig ist die auch mit ca 20ct
Re Né schrieb: > 2. Wenn der Kondi zu groß ist belastest du die Bootstrap Diode > entsprechend stärker und sie könnte durchbrennen Du vergisst dabei allerdings (der TE ist vermutlich aber schon längst ganz woanders) das ein grösserer Kondensator ja auch nur wenig durch die Gateladung entladen wird, der Aufladevorgang über die Diode auch entsprechend klein ist. Im Prinzip fliesst ja über die Bootstrapdiode nur das, was auch an Gateladung 'verbraucht' wird. Ich nutze hier Endstufen mit 3*IRFB3207 parallel, je 15R Gatewiderstand und 100µF/50V, das läuft dauerhaft und gut. (4kW/48V PMSM). Die Elkos werden so auch nur wenig belastet, weil sie kaum geladen und entladen werden und eigentlich immer fast voll sind.
Ja.. muss man halt auf den Anwendungsfall beziehen. Ich steuere meistens mosfets mit 40-800kHz und Rg weit unter 10R an (einzeln nicht mehrere Paralell) und da funktioniert die Kombi mit dem 1µF natürlich super. Und ja klar wird der 100µF nicht komplett entladen allerdings würde er bei sehr hohen Frequenzen auch nie ganz Voll geladen werden ;)
Re Né schrieb: > 40-800kHz Das kann ich mit meinen dicken Motoren hier nicht machen, ich muss knapp jenseits der Hörgrenze bleiben, sonst werden die Verluste viel zu hoch. Am liebsten würde ich sie nur mit 2-3 kHz fahren, aber dann pfeifts. Ich muss hier wirtschaftlich vorgehen und kann mir keine Wärmeverluste in den MOSFet leisten. Re Né schrieb: > allerdings würde er bei > sehr hohen Frequenzen auch nie ganz Voll geladen werden ;) Bei sehr hohen Frequenzen wie 800kHz würde ich auch keine Elkos nehmen. Aber warum sollte er nicht voll werden? Es spricht nichts gegen die vollständige Ladung durch die Diode.
Bitte melde dich an um einen Beitrag zu schreiben. Anmeldung ist kostenlos und dauert nur eine Minute.
Bestehender Account
Schon ein Account bei Google/GoogleMail? Keine Anmeldung erforderlich!
Mit Google-Account einloggen
Mit Google-Account einloggen
Noch kein Account? Hier anmelden.