Guten Tag!
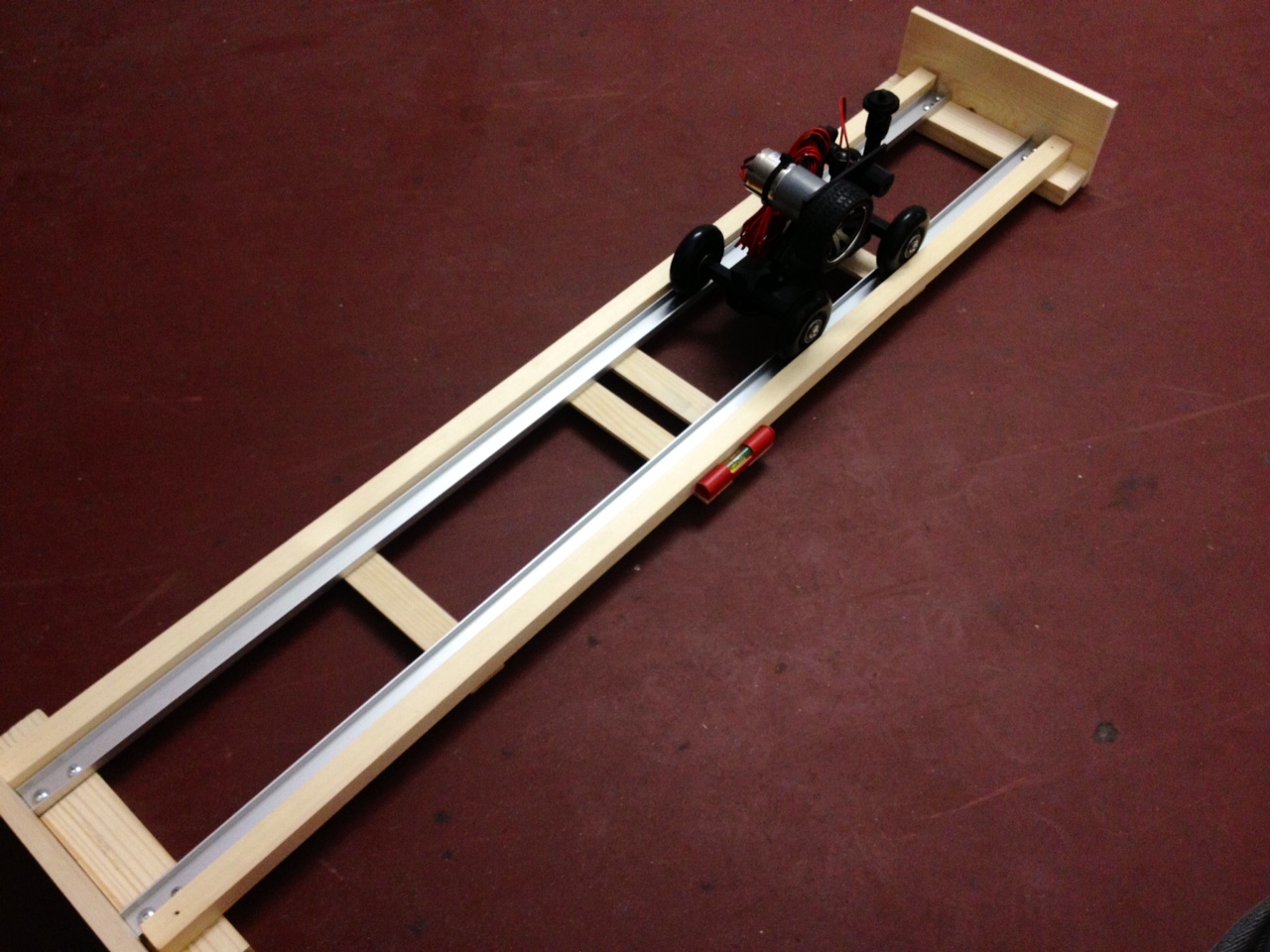
ich hab mir einen Cam-Dolly mit Motor gebaut.
Auf diesem kleinen Dolly kann ich eine GoPRo oder größere Cams
hin und her fahren lassen. Der Dolly mit dem Motor fährt sehr
langsam auf einer Schiene und ermöglicht so edle Kamerafahrten.
Ich habe eine Art Fernebedienung (per Kabel), mit der ich
per Schalter die Drehrichtung des Motors schalten kann. Vor/Stop/Zurück.
ein Poti mit einer kleinen Schaltung ermöglicht mir, die Geschwindigkeit
noch leicht zu variieren.
Jetzt die Frage - Welche Art Mikrocontroller könnte es mir ermöglichen
die Umschaltung der Polung selbständig zu übernehmen, sodass der Dolly
von allein, alle 8 Sek (Beispiel) die Fahrtrichtung ändert.
- Dolly soll von allein hin und her fahren
- die Zeit für's Intervall müsste man einstellen können - zw. 4-30
Sekunden
hier der Dolly in Action:
https://www.youtube.com/watch?v=U08WbRi1R0U
(leider muss ich noch per Schalter die Richtung umsschalten)
kann mir hier jemand weiterhelfen?
vielen dank!
Peter W. schrieb:> Jetzt die Frage - Welche Art Mikrocontroller könnte es mir ermöglichen> die Umschaltung der Polung selbständig zu übernehmen, sodass der Dolly> von allein, alle 8 Sek (Beispiel) die Fahrtrichtung ändert.
Ich wundere mich immer wieder, wieso heutzutage immer wieder jemand
denkt,
einen Microkontroller oder gar einen PC einsetzen zu müssen für
sogennannte
"Lulu-Anwendungen"...
Ein einfaches Gatter eines 4093, ein OP eines 324 oder ein 555 kann
genau
das, ein bzw. zwei Relais sind das Schlußlicht!
Wahrscheinlich kennt das heute niemand mehr außer Denen, die schon einen
weißen Bart haben...
Gruß an Alle
Mani
Mani W. schrieb:> Peter W. schrieb:>> Jetzt die Frage - Welche Art Mikrocontroller könnte es mir ermöglichen>> die Umschaltung der Polung selbständig zu übernehmen, sodass der Dolly>> von allein, alle 8 Sek (Beispiel) die Fahrtrichtung ändert.>> Ich wundere mich immer wieder, wieso heutzutage immer wieder jemand> denkt,> einen Microkontroller oder gar einen PC einsetzen zu müssen für> sogennannte> "Lulu-Anwendungen"...>> Ein einfaches Gatter eines 4093, ein OP eines 324 oder ein 555 kann> genau> das, ein bzw. zwei Relais sind das Schlußlicht!>> Wahrscheinlich kennt das heute niemand mehr außer Denen, die schon einen> weißen Bart haben...>> Gruß an Alle>> Mani
Wie wäre es mit einem Raspberry Pi :D nur um da mal auf den Hype
aufzuspringen ;) Oder ein Banana Pi, ein Intel Atom Board, ein Arduino,
ein Pic, ,man könnte das bestimmt auch irgendwie sein Handy machen
lassen.... Nur um max Aufwand zu schaffen...
Oder der ESP8266 , dann liefe das alles noch über Wifi...
Oder kennst du diese Nickenden Vögel, die mit Wasser gefüllt sind, die
könnten immer nen Taster betätigen, was dann von dem AVR ausgewertet
wird....
Lange Rede, überhaupt keinen Sinn, du kannst ALLES nehmen, was entweder
irgendwie programmierbar ist, oder eben das Gatter Zeug.
Empfehle -> setz dich mal an Arduino, wenig zu tun, schneller Erfolg.
Das kann wohl fast jeder halbwegs aktuelle Mikrocontroller. Notwendig
sind 2 Ausgänge, ein Starttaster-Eingang und ein Analogeingang. Welchen
du nimmst, hängt eher von dir ab.
Eine Picaxe zum Beispiel könnte das und läßt sich mit wenig Aufwand in
BASIC programmieren.
Attiny geht auch, C oder BASIC. Beide haben ADC zum Anschluß eines Poti,
damit läßt sich die Pause einstellen.
Oder du nimmst so ein fertiges Board, das sich am USB-Stecker
programmieren läßt. Arduino zum Beispiel.
So was kleines läßt sich auch mit ein wenig Logik zusammenstricken. Wenn
du lieber lötest statt zu programmieren.
Helge A. schrieb:> Oder du nimmst so ein fertiges Board, das sich am USB-Stecker> programmieren läßt. Arduino zum Beispiel.
Welch Aufwand für ein einfaches "Hin - und zurück"...
Mani
>Wahrscheinlich kennt das heute niemand mehr außer Denen, die schon einen>weißen Bart haben...
Ach komm, du weißt es doch selber ....
Da baut man das schönste Gatter Grab, und dann, dann kommt eine Furz
Zusatzanforderung an die vorher keiner gedacht hat....
Zack: Alles für die Tonne.
Für die beschriebene Anforderung reicht ein Arduino Pro Mini(2E) vom
Chinesen der Wahl. Plus Netzteil und Motor Brücke(2,5E).
Ein paar Endschalter (2*1E) wären bestimmt auch noch hilfreich.
Die Es sind nur geschätzt.
>Welche Art Mikrocontroller könnte es mir ermöglichen>die Umschaltung der Polung selbständig zu übernehmen
Jede Art! Hersteller egal, Harvard, Neumann, egal...
Eigentlich jeder, wenn er denn genug Pins hat.
Schlagzeuger sind Künstler...
Für Künstler sind die Arduinos erfunden worden.
(egal obs stimmt, oder nicht, passt schon)
Material billg, Informationen massig vorhanden.
Ulrich F. schrieb:> Da baut man das schönste Gatter Grab, und dann, dann kommt eine Furz> Zusatzanforderung an die vorher keiner gedacht hat....> Zack: Alles für die Tonne.
Sorry, so etwas kann nur jemand schreiben, der viele Semester nach mir
die Elektronik entdeckte???
Es gibt kein Gatter-Grab, Du würdest Dich wundern, wie einfach
PWM-Modulatoren oder so banale Zeitsteuerungen mit ca. 8 sek.
Drehrichtungswechsel mit ganz
normalen und 30- jährigen Bauteilen zu bauen sind.
Geht aber nicht, weil Du scheinbar nur programmierbare Logik benutzt...
Schönen Gruß
Mani
>Welch Aufwand für ein einfaches "Hin - und zurück"...
Arduino und Motorshield aus China für je ein paar € kaufen, Code aus den
Millionen Beispielprojekten aus dem Internet zusammenkopieren, geht.
Während man in Villabajo noch überlegt, welchen Motortreiber man wie an
den 555 hängen muss, hat man in Villariba als nächsten Schritt schon
einen IR-Empfänger an den Arduino gesteckt, eine Library gesucht und
gibt Geschwindigkeit und Intervallzeit über eine alte Fernbedienung ein.
Ulrich F. schrieb:> Welche Art Mikrocontroller könnte es mir ermöglichen>>die Umschaltung der Polung selbständig zu übernehmen
1/4 4093, ein Widerstand, ein Kondensator, als Grundausstattung...
Minimaler Aufwand
Mani W. schrieb:> Ulrich F. schrieb:>> Welche Art Mikrocontroller könnte es mir ermöglichen>>>die Umschaltung der Polung selbständig zu übernehmen
Zitieren will auch gelernt sein :-)
Diese Aufgabe würde ich mit zwei Endschaltern und einem bistabilen
Relais lösen.
Aber, vermutlich möchtest du außerdem sanft anfahren und abbremsen ohne
dabei an die Enden der Strecke anzustoßen.
In diesem Fall würde ich wegen der Regelung einen Mikrocontroller
einsetzen, mit H-Bridge als Motortreiber, sowie einen Reedkontakt +
Magnet oder eine kleine Reflexions-Lichtschranke zur Positionserkennung.
Stefan Us schrieb:> Aber, vermutlich möchtest du außerdem sanft anfahren und abbremsen ohne> dabei an die Enden der Strecke anzustoßen.
Schau an, da haben wir doch schon wieder zwei von diesen kleinen
hässlichen Zusatzanforderungen....
;-)
Mani W. schrieb:> 1/4 4093, ein Widerstand, ein Kondensator, als Grundausstattung...>> Minimaler Aufwand
Ein ganzer Attiny25, ein Kondensator...
Noch weniger Aufwand
mfg.
Thomas Eckmann schrieb:> Ein ganzer Attiny25, ein Kondensator...
und wahrscheinlich noch in die µC Programmierung einarbeiten
> Noch weniger Aufwand
Sicher?
Mark schrieb:> Thomas Eckmann schrieb:>> Ein ganzer Attiny25, ein Kondensator...> und wahrscheinlich noch in die µC Programmierung einarbeiten>> Noch weniger Aufwand> Sicher?Mani W. schrieb:> 1/4 4093, ein Widerstand, ein Kondensator, als Grundausstattung...
und wahrscheinlich noch einen Lötkolben kaufen, löten lernen
> Minimaler Aufwand
Sicher?
mfg.
Thomas Eckmann schrieb:> und wahrscheinlich noch einen Lötkolben kaufen, löten lernen
I) Das würde bei der Attiny Variante auch noch dazu kommen. Zusätzlich
muss er unabhängig davon was er noch lernen und kaufen muss eine
Software schreiben.
II) Das Foto im eröffnungspost sieht aber so aus als könnte er das
bereits.
Die Frage
> Welche Art Mikrocontroller könnte es mir ermöglichen> die Umschaltung der Polung selbständig zu übernehmen, sodass der Dolly> von allein, alle 8 Sek (Beispiel) die Fahrtrichtung ändert.
lässt aber darauf schließen, dass er sich noch nie mit µCs beschäftigt
hat, außer es tritt der unwahrscheinliche Fall ein, dass der µC mit dem
er sich beschäftigt hat die Aufgabe nicht lösen kann.
@ Peter W.: Korrigiere mich wenn ich falsch liege.
Mark schrieb:> lässt aber darauf schließen, dass er sich noch nie mit µCs beschäftigt> hat, außer es tritt der unwahrscheinliche Fall ein, dass der µC mit dem> er sich beschäftigt hat die Aufgabe nicht lösen kann.
Die Frage ist doch eindeutig gestellt:
Peter W. schrieb:> Jetzt die Frage - Welche Art Mikrocontroller könnte es mir ermöglichen> die Umschaltung der Polung selbständig zu übernehmen, sodass der Dolly> von allein, alle 8 Sek (Beispiel) die Fahrtrichtung ändert.
Also, was sollen diese ewigen Mikrocontroller-Overkill-Verschwörungs-
und Früher-War-Alles-Besser-Theorien?
mfg.
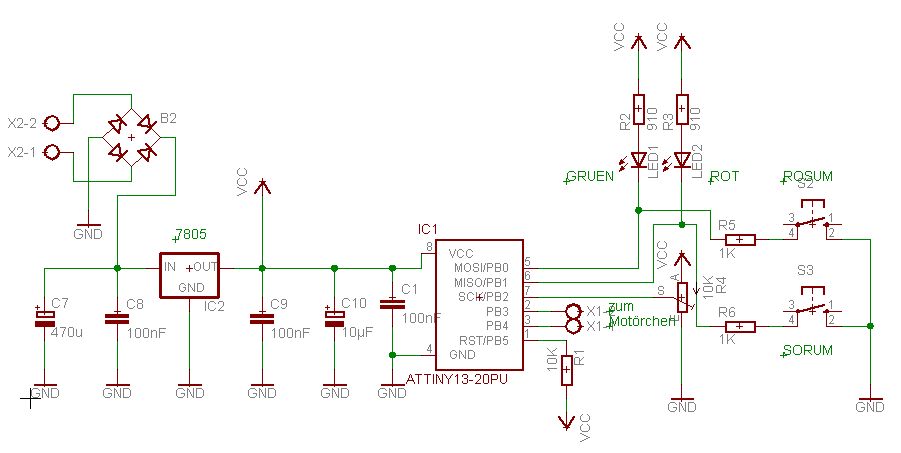
Hier ist ein kleines Programm zur Steuerung einer Seilbahn. Das geht für
Deine Aufgabe auch. Die Schaltung mußt Du ggf. noch um einen
Leistungsteil
ergänzen, ich hatte so ein kleines Motörchen, das schaffte der AVR auch
noch alleine.
MfG Paul
'*****************************Seilbahn-Ansteuerung Version 1
'*****************************Paul Baumann 26.02.09
$regfile = "attiny13.dat"
$crystal = 9600000
$hwstack = 32 ' default use 32 for the
hardware stack
$swstack = 10 'default use 10 for the SW stack
$framesize = 40 'default use 40 for the frame
space
Ddrb = &B00011000 'Portb 4 und 3 Ausgang Rest
Eingang
Portb = &B00000011 'Pullup an PB0-PB1 einschalten
Dim Geschwindigkeit As Byte
Dim Adcwert As Byte
Dim Zeitzaehler As Word
Dim Merker As Byte
'PortB0 Taster Rosum +LED 1
'PortB1 Taster Sorum +LED 2
'PortB2 Poti
'PortB3 Oberer OPV
'PortB4 Unterer OPV
Const Fahrzeit = 1000
'Entspricht
17 sekunden
Config Timer0 = Timer , Prescale = 64 'Timer wird mit 150 Khz getaktet
Admux = &B00100001 'ADC-Kanal 1 mit 150 Khz
Adcsra = &B11100010 'Vcc als Referenz, Linksbündig,
Kanal 1 ausgewählt
Enable Interrupts
'Interrupts Global einschalten
Enable Timer0
On Timer0 Ontimer0
'*************************************Hauptschleife ;-)
Do
Loop
'*************************************Timerinterrupt
Ontimer0:
Geschwindigkeit = Adch 'Zunächst AD-Wandler einlesen
'*************************************ROSUM fahren
If Merker.0 = 1 Then 'Wenn der Merker gesetzt ist
If Zeitzaehler < Fahrzeit Then 'und wenn der Zeitzaehler noch
nicht am Ende ist
Portb.4 = 1 'Motor einschalten
Toggle Portb.3 'und PWM draufgeben
If Portb.3 = 1 Then 'Wenn der PWM Ausgang gerade
H-Pegel hat
Timer0 = 256 - Geschwindigkeit 'dann H-Zeit für PWM in den
Timer
Else 'Sonst
Timer0 = Geschwindigkeit 'L-Zeit in den Timer
Zeitzaehler = Zeitzaehler + 1 'Zeitzaehler incrementieren
End If
Else 'Sonst wenn Zeit erreicht ist
Zeitzaehler = 0 'Zeitzaehler auf Null zurück
Portb.4 = 0 'Motor aus
Portb.3 = 0
Reset Merker.0 'Merker rücksetzen
End If
End If
'************************************SORUM fahren
If Merker.0 = 0 Then
If Zeitzaehler < Fahrzeit Then
Portb.3 = 1
Toggle Portb.4
If Portb.4 = 1 Then
Timer0 = 256 - Geschwindigkeit
Else
Timer0 = Geschwindigkeit
Zeitzaehler = Zeitzaehler + 1
End If
Else
Zeitzaehler = 0
Portb.4 = 0
Portb.3 = 0
Set Merker.0
End If
End If
Return
Thomas Eckmann schrieb:> Peter W. schrieb:>> Jetzt die Frage - Welche Art Mikrocontroller könnte es mir ermöglichen>> die Umschaltung der Polung selbständig zu übernehmen, sodass der Dolly>> von allein, alle 8 Sek (Beispiel) die Fahrtrichtung ändert.>> Also, was sollen diese ewigen Mikrocontroller-Overkill-Verschwörungs-> und Früher-War-Alles-Besser-Theorien?
Ich geb dir im Prinzip recht.
Jedoch wissen wir auch alle, dass viele 'Ich würde gerne bauen'
Ankömmlinge hier im Forum nicht die geringste Ahnung haben, was mit
einem µC auf sie zukommt. Da heutzutage selbst die einfachsten Dinge mit
einem Computer gelöst werden, ist das vermeintlich eine Sache auf einen
halben Nachmittag, der sich in der Praxis dann schon auch mal auf ein
paar Wochen ausdehnt, weil es eben dann doch nicht so einfach ist wie
anfangs gedacht.
Wenn µC, dann würde ich einen Arduino nehmen. Schon alleine aus dem
Grund, dass dann die ganze Problematik mit einem extra Brenner wegfällt,
der ja bei einer bare-metal Lösung mit AtTiny auch noch anfällt.
Wenn ohne µC: Verstellbare Endschalter an der Dolly und Relais. Das
könnte tatsächlich eine Sache auf ein paar Stunden sein, weil es selbst
für einen unbedarften leicht nachzuvollziehen ist. Stichwort
"Wendeschaltung mit Selbsthaltung"
Beitrag "Wendeschaltung mit Selbsthaltung"
Hallo
Ob nun per "Gattergrab" oder per uC, bei einer
festen Zeitbasis könnte sich doch nach gewisser
Zeit ein Fehler einschleichen.
(Schlupf der Räder des Wagens etc.)
Ist es da nicht besser das ganze "mechanisch starr"
mit Endschaltern zu realisieren ?
Damit bleibt aber die "harte" Richtungsänderung.
Aber die ist ja jetzt mit dem handbetätigtem
Umschalter auch gegeben.
Soweit das den TO nicht weiter stört, ist das ja ok.
Das wären dann zwei Endschalter und ein bistabiles
Relais, fertig ist der Lack.
Seine Geschwindigkeitsregelung per Poti ist dann
weiterhin nutzbar.
Gruss Asko.
 Dolly.JPG
(390 KB)
Dolly.JPG
(390 KB)
 Dolly_Parts.jpg
(65 KB)
Dolly_Parts.jpg
(65 KB)