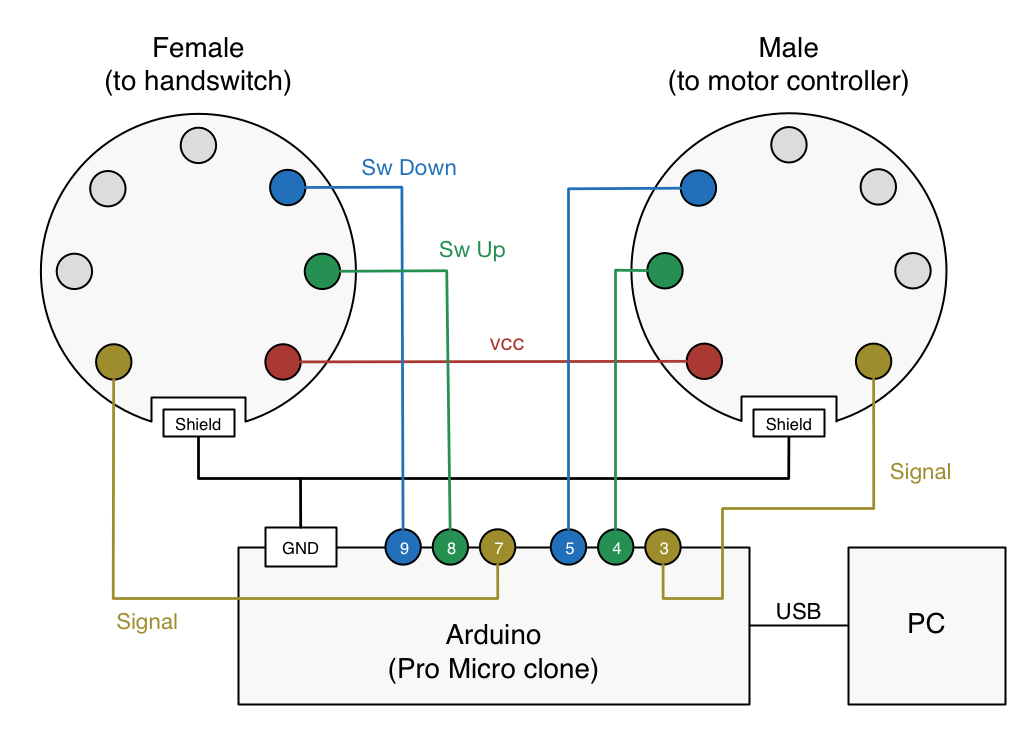

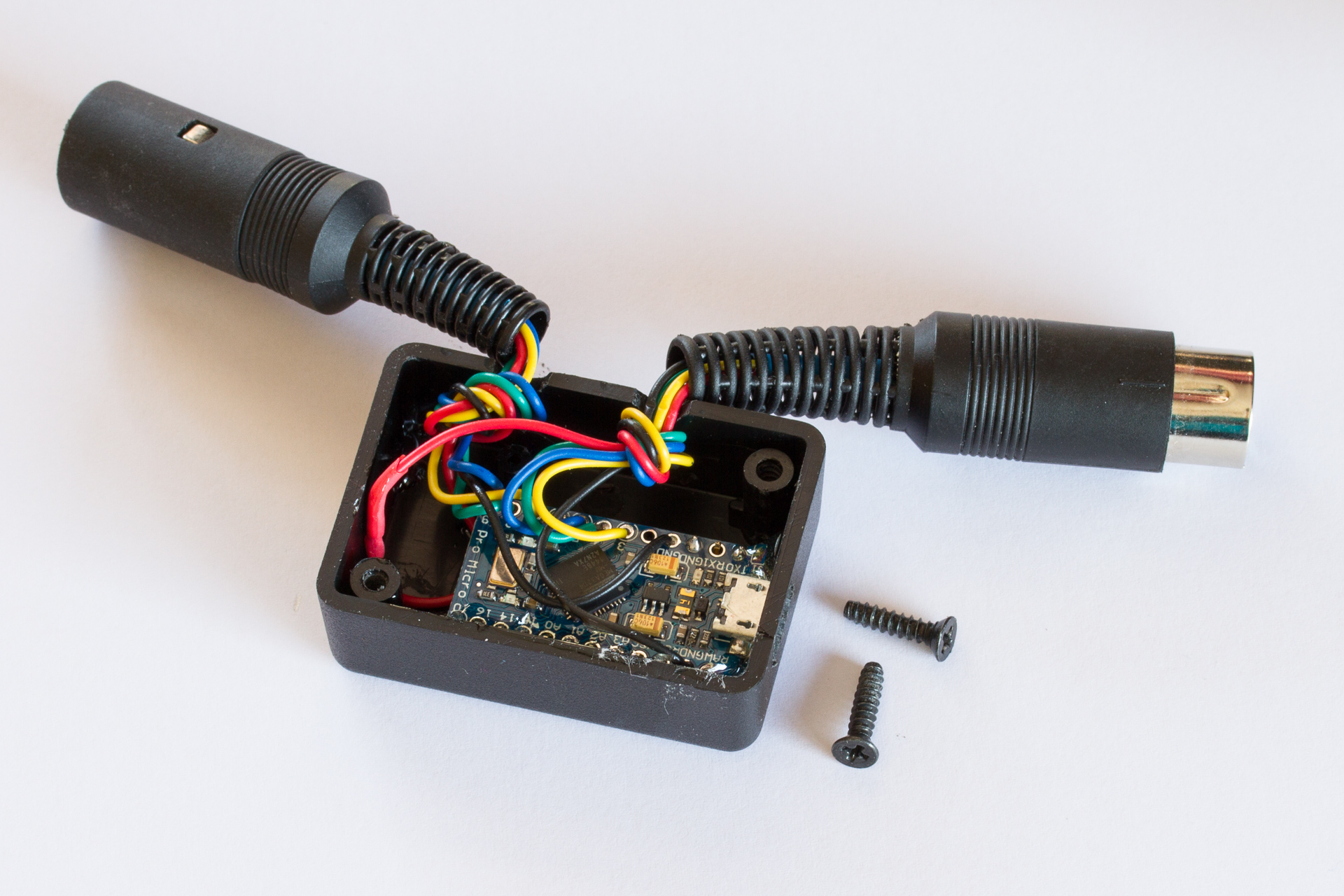
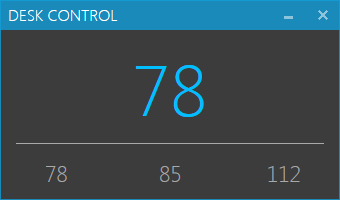
*Hallo zusammen!* Hiermit möchte ich euch mein aktuelles (und gerade fertig gestelltes) Projekt „DeskControl“ vorstellen. Dabei handelt es sich um einen kleinen Controller zur Steuerung von höhenverstellbaren Schreibtischen. Unterstützt werden alle Modelle, die eine LogicData Compact Motorsteuerung (oder kompatibel) verwenden. Siehe auch: http://www.logicdata.at/produkte/logic-office/steuerungseinheiten/compacteco.html Projektidee Wenn ich an meinem höhenverstellbaren Schreibtisch arbeite, nutze ich gerne drei verschiedene Höhen: Arbeiten im Stehen, „dynamisches“ Sitzen auf einem Sitzball sowie einen gewöhnlichen Bürostuhl. Jede der drei Höhen muss recht umständlich über den Handschalter des Schreibtischs angefahren werden. Daher meine Idee: die Höhen sollen komfortabel über ein Desktop-Widget ausgewählt und dann automatisch angefahren werden können. Der Controller Die hier vorgestellte Steuerung des Schreibtisches sitzt zwischen dem Motor-Controller und dem Handschalter. Sie ist so zu sagen ein „Man-in-the-middle“. Ihre Aufgaben sind: - Auslesen der übertragenen Höheninformationen - Simulation von tastendrücken zum Hoch-und Runterfahren - Durchleiten der Signale zwischen Handschalter und Motorsteuerung, damit nach wie vor eine manuelle Bedienung möglich ist - Kommunikation mit dem PC per USB Das Herzstück des Controllers ist ein Arduino Pro Micro. Daran sind direkt die Stecker angeschlossen (eine eigene Platine ist also nicht nötig). Ein Bild der Platine inkl. Verkabelung habe ich diesem Post angehängt. Auch den Arduino-Code des Controllers findet ihr oben. Die App zur Ansteuerung Diese ist eine Windows „Metro“ Anwendung (siehe oben), geschrieben in C# und WPF. Sie zeigt die aktuelle Höhe an, und hat drei Buttons, über die direkt die entsprechende Höhe angefahren werden kann. Die Kommunikation mit dem Controller läuft ganz einfach über einen virtuellen COM-Port. Die Sourcen der App sind ebenfalls oben zu finden. Fazit Das Projekt ist nun schon seit zwei Wochen an meinem Arbeitsplatz in Betrieb. Bis jetzt gab es keinerlei Probleme oder Aussetzer. Und es ist wirklich so praktisch, wie ich mir das vorgestellt hatte
Angehängte Dateien:
-

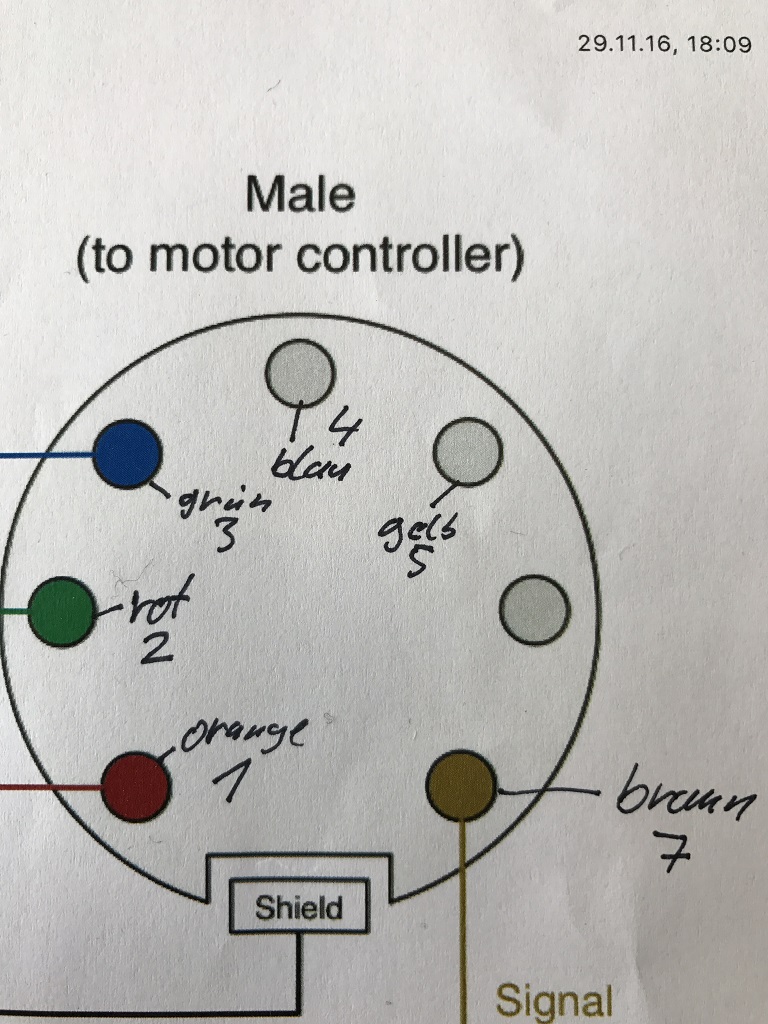
Connections.png
86 KB -

DeviceOutside.jpg
170 KB -

DeviceInside.jpg
800 KB -

ControlApp.png
4,6 KB
Hm, daran arbeite ich auch gerade nur für die IKEA Tische. Was sprechen die denn für ein Protokoll?
Robert N. schrieb: > Was sprechen die denn für ein Protokoll? Zum Glück ein Einfaches :-) Die Motorsteuerung sendet Datenpakete an den Handschalter, in denen die Höhe codiert ist. Siehe hier: Beitrag "Protokoll entschlüsseln" Der Handschalter zieht lediglich zwei Leitungen (Hoch + Runter) auf High, um den Tisch zu bewegen.
Stark! Gleich mal einen Arduino bestellen. Leider fehlt mir in deiner Verkabelung noch der Hinweis, ob man von vorn oder von hinten auf die Buchse/den Stecker blickt. Ansonsten ein super Projekt :)
M. H. schrieb: > Leider fehlt mir in deiner Verkabelung noch der Hinweis, ob man von vorn > oder von hinten auf die Buchse/den Stecker blickt Der soll hiermit nachgeliefert werden: Buchse und Stecker sind von vorne zu sehen. Also aus "Anwendersicht". Danke für den Hinweis! M. H. schrieb: > Stark! Gleich mal einen Arduino bestellen. Sehr schön, dann hat sich meine Projektvorstellung ja gelohnt :-) Viel Erfolg!
Coole Idee. Um die Sache aber vielleicht auch für *nix Benutzer ausführbar zu machen, wäre es vielleicht noch nett zu sagen was du per USB-Seriell an den Controller verschickst. Dann braucht man nämlich nicht(faul wie ich bin) das aus der ino rauslesen ;)
Das ist ja eigentlich eine prima Idee, nur diese Relaisierung: Boris P. schrieb: > Daher meine Idee: die Höhen sollen komfortabel über ein Desktop-Widget > ausgewählt und dann automatisch angefahren werden können. gefällt mir eher nicht. Für alles muss es eine App oder sonst was geben. Also braucht man immer das Handy mit passender App, den Computer/Notebook/Tablet um etwas verstellen zu können. Ein µC der einfach 3 Taster abfragt und dann auf eine der 3 vorprogrammierten Höhen einstellt wäre deutlich praktischer, für die Handy Anbindung kann man sich ja immer noch für die Konfiguration austoben :-)
Udo S. schrieb: > gefällt mir eher nicht. Für alles muss es eine App oder sonst was geben. > Also braucht man immer das Handy mit passender App, den > Computer/Notebook/Tablet um etwas verstellen zu können. Da das ganze an meinem Arbeitsplatz installiert ist, läuft dort sowieso immer ein PC. Falls der doch mal aus sein sollte, kann der Tisch ja immer noch manuell über den Handschalter verstellt werden. Wer mag kann auch gern noch ein paar taster an den Arduino löten ;-)
Ich verwende dafür voll-cool ein Analogsystem, einschließlich analoger Regelschleife! Auf den Tischbeinen sind mit farbigem Isolierband meine gewünschten Höhen markiert. Zum Anfahren einer Einstellung trete ich einen vom Schritt zurück, Finger an den Auf-Ab Schaltern und schaue auf die Tischbeine. Durch Beobachtung und Auswertung der aktuellen Position und Vergleich mit der markierten Sollposition bestimme ich die Anfahrrichtung und betätige den entsprechenden Schalter. Bei Erreichen der gewünschten Endposition lasse ich ihn wieder los. Eventuelle Ungenauigkeiten der Endposition werden durch Betätigungen der Schalter mit variabler Dauer, bei gleichzeitiger Beobachtung der Tischbeine, ausgeregelt. Alles Arduinofrei.
Jay schrieb: > Ich verwende dafür voll-cool ein Analogsystem, einschließlich analoger > Regelschleife! Na dann: ran an den Lötkolben :-)
Hallo. Ich werde mir in den nächsten 2 Wochen einen höhenverstellbaren Schreibtisch bauen. Dieser kann dann auch nur hoch runter. Bin also sehr an dieser Steuerung interessiert. Habe mir die Teile schonmal zusammen gesucht. Nur stoße ich auf ein Problem. Die Metro App ist ja nur bis Windows 8 funktionell. Wie bekomme ich das auf Windows 10 zum laufen? Der zusammenbau, löten usw sind kein Problem nur kann ich nicht programmieren. Hat da vielleicht einer schon eine Lösung für Windows 10? Auch an einer möglichkeit das ohne Windows zu steuern wäre eine möglichkeit. Wie sieht die Analog Steuerung aus was brauche ich dafür? MfG Sven
Sven T. schrieb: > Die Metro App ist ja nur bis Windows 8 funktionell. > Wie bekomme ich das auf Windows 10 zum laufen? Die ist ebenso unter Windows 10 lauffähig. Just in diesem Moment fahre ich nämlich meinen SChreibtisch damit hoch ;-) Zur Erklärung: Das ist eine ganz normale Desktop-Anwendung, die nur mit einem Theme in Metro-Optik aufgehübscht ist (verwendet MahApps Metro).
Hmm. Hab jetzt Visual Studio drauf und frage mich wie ich mit der Datei die App raus bekomme. So ganz ohne Ahnung von der Materie wird das wohl nichts. Hab die sln mit VS geöffnet wie gehts weiter?
Hi Sven, versuch mal im Menü "Build -> Build Solution". Im Output-Fenster steht dann entweder 1 Succeeded, oder es hagelt Fehler ;-) Wenn alles geklappt hat, findest du im Ordner bin/Debug bzw. bin/Release die .exe-Datei.
So ein Mist. Ich hab gerade eine Woche lang das gleiche programmiert und jetzt finde ich diese Seite.. wie ärgerlich..
Wie ich geschrieben habe leider gar keine Ahnung was ich da mach. Hab den Arduino geflasht. Weiß auch an welchen com port (4) er ist. Meldet sich als Arduino Leonardo an. Baudrate 9600 sollte wie ich gesehen habe auch passen Wo trage ich den com port in VS ein? Sources/Serial da muß es doch sein Ardiono Connector oder SerialportWrapper. Ich hab keine Ahnung wo ich da was eintragen muß. Kann es sein das Du den Code leer gelassen hast was den Com Port angeht? Beim debugen gibt es com port fehler. Menü Build habe ich nicht es ist eine Deutsche Community Version von VS Gar nicht so leicht die Geburt. Mein Kompetenz liegt leider ganz woanders. MfG
Sven T. schrieb: > Wo trage ich den com port in VS ein? > > Sources/Serial da muß es doch sein Ardiono Connector oder > SerialportWrapper. > > Ich hab keine Ahnung wo ich da was eintragen muß. > > Kann es sein das Du den Code leer gelassen hast was den Com Port angeht? Hi, der COM port wird dem Programm beim Start als Parameter übergeben. Er ist nicht im Code fest vorgegeben. - Also einfach eine Verknüpfung zu der .exe auf den Desktop oder die Taskleiste legen - Rechtsklick -> Eigenschaften - Z.B. "COM4" als Parameter eintragen - Das Programm mit diesem Shortcut starten Sven T. schrieb: > Gar nicht so leicht die Geburt. Mein Kompetenz liegt leider ganz > woanders Nicht verzagen :-)
Hi. So es ist soweit alles was ich versuche funktioniert nicht auch com4 eintragen. Ich gebe auf. Werde versuchen mir Hilfe hier aus der Gegend zu besorgen. Habe keine lust mich wegen so einer kleinen Steuerung mich mit programmieren und Visual Studio zu befassen. Ist den aufwand nicht wert. Trotzdem Danke für die Hilfe und Geduld. MfG Sven
Super Idee. Hasst du vielleicht noch die Typen von Stecker und Buchse, damit ich nicht die falschen kaufe...
salamander schrieb: > Super Idee. Hasst du vielleicht noch die Typen von Stecker und Buchse, > damit ich nicht die falschen kaufe... Ich hatte die bei Reichelt bestellt: MAS 70S DIN-Stecker, 7-polig 0,90 € MAK 70S DIN-Kupplung, 7-polig 0,98 €
Angehängte Dateien:
-

Platine.JPG
210 KB -

Pinbelegung.JPG
260 KB
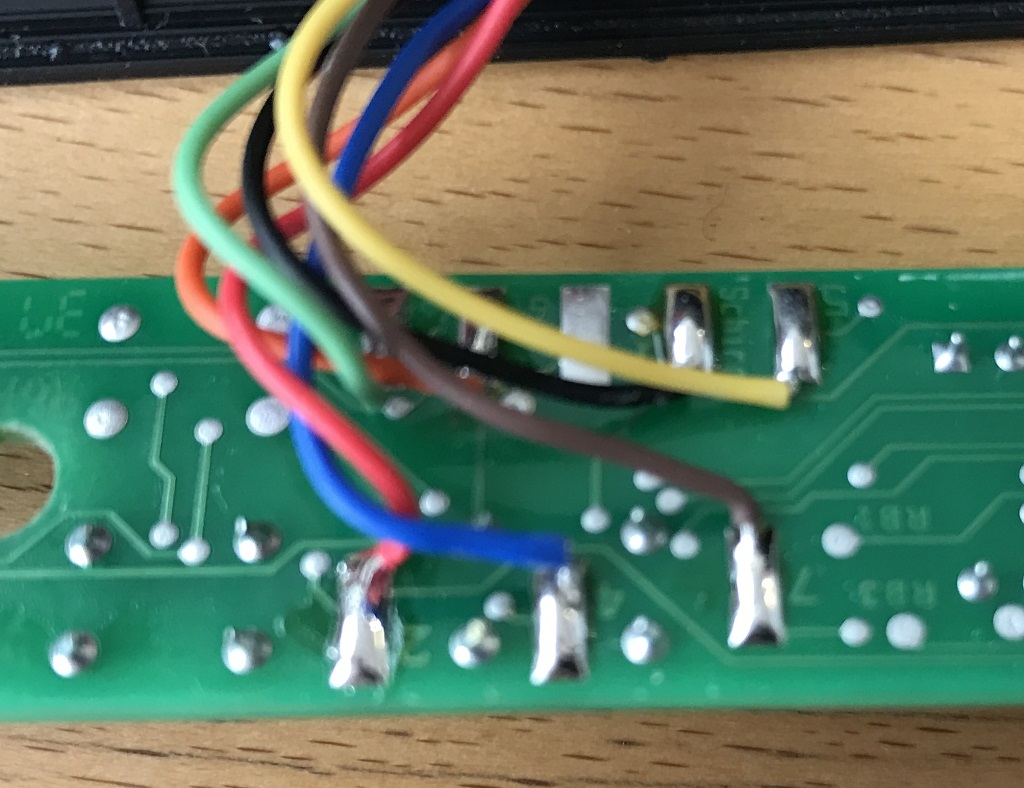
Wir haben seit kurzem auch höhenverstellbare Schreibtische im Büro in Verwendung und haben nach einer Lösung dafür gesucht, diese extern zu steuern. Dabei sind wir auf Ihre Lösung gestoßen und haben versucht diese anzuwenden. Der Schreibtisch wird von einem LogicData Compact-e-2L-O-V-EU gesteuert. Nach Ihrer Anleitung habe ich die DIN-Stecker zusammengelötet und mit einem Arduino Nano verbunden, Pins D3-5 und D7-9 sowie GND. Ebenso wurde die oben angehängte Firmware auf den Arduino aufgespielt. Sobald der Tisch mit dem Strom verbunden wird, fährt er kurz ca. 1s hoch und runter, danach sporadisch mal ganz nach oben oder ganz nach unten, aber weder Knöpfe drücken, noch die Windows-App haben irgendeinen Einfluss, dort steht als Höhe immer 0 drin. Am Tisch wird die richtige Höhe auf dem Display angezeigt, allerdings klappt sonst nix. Unser Controller hat wie auf dem Foto zu sehen 7 Kabel verbunden, 2 davon konnten wir auf die beiden Buttons zurückführen, diese stimmen auch mit Ihrem Schema überein, nur die Farben sind anders. 1. Liegt es vielleicht daran, dass wir einen Arduino Nano verwenden anstelle des Mikro 2. Sind die Pinbelegungen zum Teil möglicherweise anders, was das Signal angeht? Haben Sie uns vielleicht einen Tipp, woran das liegen könnte, bzw. wie das behoben werden kann?
Stephan Maier schrieb: > 1. Liegt es vielleicht daran, dass wir einen Arduino Nano verwenden > anstelle des Mikro Das sollte keinen Unterschied machen. Stephan Maier schrieb: > 2. Sind die Pinbelegungen zum Teil möglicherweise anders, was das Signal > angeht? Da würde ich auch ansetzen: - Kurz messen: sind Hoch/Runter/Signal richtig am DIN-Stecker abgegriffen? - An welche Pins sind diese am Arduino angeschlossen? - Passt die Software zu den Pin-Indizes?
die beiden zusätzlichen Kabel sind für eine Speicherfunktion, man kann mit ein paar zusätzlichen Tasten feste Höhen einspeichern. Die hab ich jetzt einfach nur durchgeschleift. Die Pinbelegung ist nach ein paar Tests genau dieselbe wie bei Ihrem Tisch, ich hatte aber in der .ino den Interrupt-Pin nicht neu definiert und der stand bei der Download-Version auf 0 anstatt 3 Mittlerweile funktioniert alles prima =)
Hallo Borislav, vielen Dank fürs Teilen deines Projekts! Ich habe mir vor einer Weile einen Tisch mit identischer Motorsteuerung gekauft und seit beginn davon geträumt diesen "intelligenter" zu machen, ob sinnvoll oder nicht. Ich habe mit Hilfe deiner Arbeit gerade mein Projekt fertiggestellt, wo ich meinen Tisch mit HomeKit von Apple verbinde, damit er via Siri und Home-App steuerbar ist. https://github.com/davidknezic/desk Ich würde das gesamte Projekt gerne unter der MIT-Lizenz veröffentlichen und würde dich deshalb gerne fragen, ob du bereit wärst dein DeskControl.ino darunter zu lizensieren? Nochmals, vielen Dank für dein Projekt und dafür dass du es hier veröffentlich hast! Ohne hätte ich mich nie an dieses Projekt gewagt :)
Hallo Herr Bertoldi, wir haben auf Basis Ihrer Tischsteuerung eine Anwendung entwickelt, bei der wir den Tisch per BLE mit einem Smartphone verbinden. Meistens funktioniert das auch korrekt, allerdings kommt es bei uns oft vor, dass die Höhe nach einigen Bewegungen nicht mehr erkannt wird. Wir vermuten, dass der bei Ihnen konstante Teil nicht wirklich konstant ist, allerdings haben wir hier keine Möglichkeit, das ordentlich auszulesen. Wären Sie eventuell bereit dazu, uns dabei zu unterstützen, oder haben Sie in der Zwischenzeit eine bessere Möglichkeit gefunden, um die Höhe zuverlässig auszulesen? Mit freundlichen Grüßen Marc-Oliver Ristau (E+M Werbung)
Ernsthaft, ihr kopiert einfach das Programm nennt es selbst Entwickelt und fragt dann noch nach Hilfe weil es nicht funktinoiert? Dreist!
Ich habe in keinem Wort behauptet, dass ich das selbst entwickelt habe. Was ich entwickelt habe, ist eine App, die den Arduino steuern kann über BLE. Dafür habe ich das DeskControl etwas angepasst, damit nicht seriell, sondern über BLE kommuniziert wird.
Lieber Gast "der andere" und "Hans" ein Mitarbeiter von mir hat ganz TRANSPARENT eine Frage an Herrn Bertoldi gestellt. Auch ich selbst habe Herrn Bertoldi per Mail kontaktiert, leider ohne die erhoffte Rückmeldung. Klar ist dass wir hier ein kommerzielles Projekt haben und daher um direkte Unterstützung angefragt haben, die außerhalb eines Forums ablaufen sollte. Es ist nicht unser Ziel, den Foren-Mitgliedern Informationen zu entlocken und diese als unser Eigentum zu verkaufen. Wir suchen nach kompetenten Partnern, die uns unterstützen können und wollen, natürlich nicht kostenlos! Sollte sich einer aus diesem Forum in der Lage fühlen uns weiter zu helfen, dann würden wir uns freuen wenn er oder sie sich bei uns meldet. Stephan Maier, s.maier@em-Werbung.com, 0160 97591507 Aber bitte keine anonymen Beleidigungen meiner Mitarbeiter mehr, immer sachlich bleiben. Gruß Stephan Maier
Marc-Oliver R. schrieb: > Ich habe in keinem Wort behauptet, dass ich das selbst entwickelt habe. > Was ich entwickelt habe, ist eine App, die den Arduino steuern kann über > BLE. > Dafür habe ich das DeskControl etwas angepasst, damit nicht seriell, > sondern über BLE kommuniziert wird. Da der Code ohne Lizenzangabe veröffentlicht wurde, ist er grundsätzlich als proprietär einzustufen, was die Nutzung in einem komerziellen Produkt ohne explizite Einwilligung des Urhebers erstmal verbietet.
Hallo Herr Meier, ich habe leider ganz gleiche Problem, dass nach dem Einschalten der Tisch willkürlich hoch und runter fährt, die Höhe wird aber korrekt ausgegeben. Könnten Sie mir vielleicht freundlicherweise mitteilen, welche Änderungen Sie vorgenommen hatten, damit es bei Ihnen ging? Vielen Dank bereits im Voraus! Gruß, Daniel
Hallo Zusammen, hier ist das Problem das Gleiche. Nach dem Arduino Start fährt der Tisch kurz nach oben. Höhe wird angezeigt. Es wird auf keinen Tastendruck, weder in der App, noch am Tisch, reagiert. Ab und an fährt der Tisch für eine halbe Sekunde willkürlich. Bereits kontrolliert: Pin Belegung Software Pin-Belegung Alles, wie in der Beschreibung angegeben zueinander verdratet. Wo liegt ggf. das Problem? Freundliche Grüße Tobi
Guten Tag, ich schließe mich an. Unkontrolliertes auf und ab nach dem anschließen... Weiß jemand was? Ich habe den Interrupt Pin angepasst, aber es funktioniert noch nicht. Muss die Device ID ebenfalls angepasst werden? Woher weiß ich diese? Vielen Dank
Hallo zusammen, zunächst mal bitte ich um Entschuldigung dafür dass ich das Thema nochmal aufwärme, aber: Hat jemand zufällig Zugang zu einem der erwähnten verstellbaren Tische mit Memory-Positionen und kann mir einen kleinen Einblick in die Verschaltung der Tasten auf dem Bedienfeld geben? Schöne Grüße
Angehängte Dateien:
-

Steuergeraet_Bild1.jpg
240 KB -

BildLuecke.jpg
240 KB
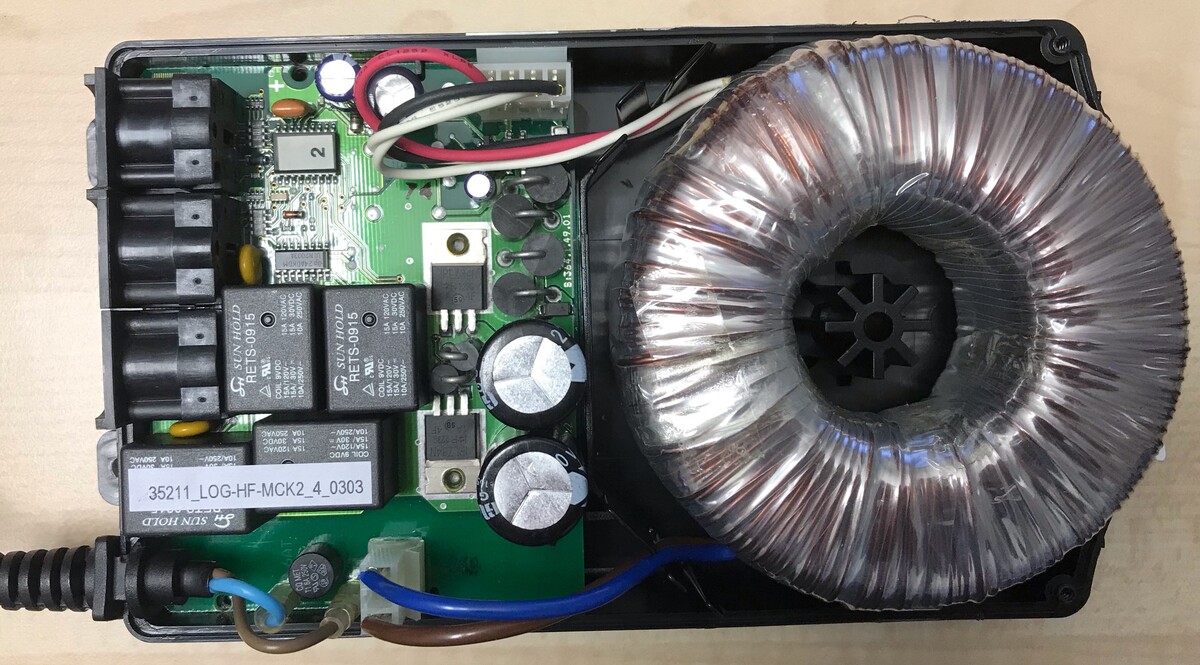
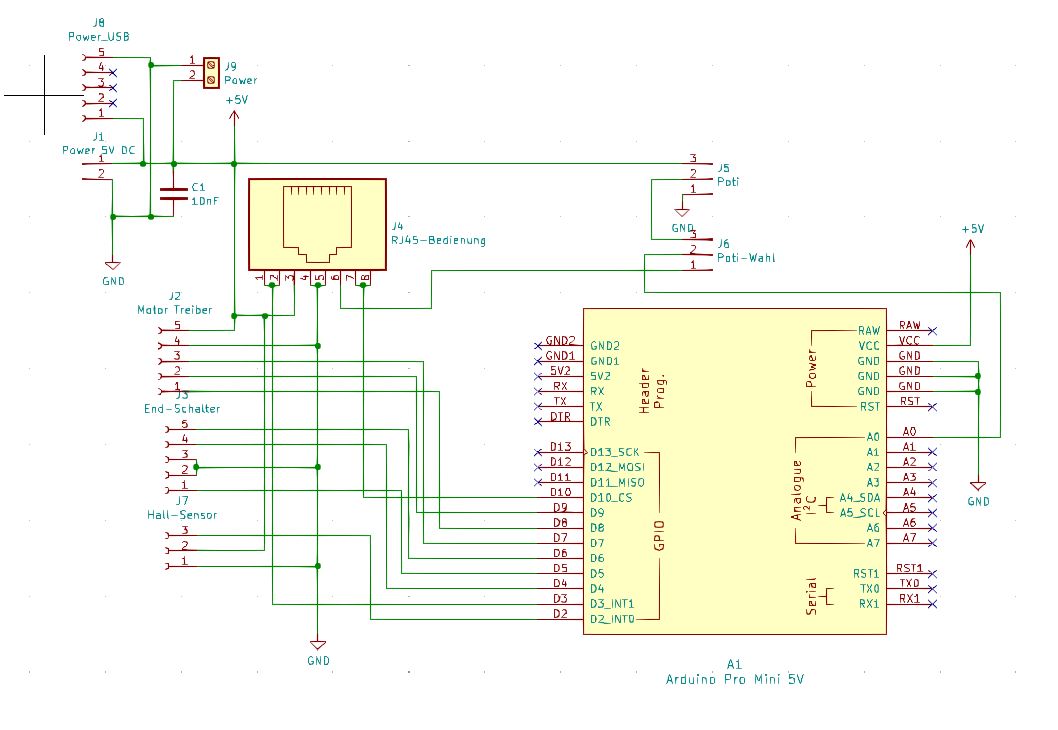
Hallo, ich habe auch ein Steuergerät mit zwei Füßen für einen Schreibtisch. Leider habe ich keine Schaltung von dem Gerät- Hat jemand dieses Steuergerät schon mal gesehen und einen Plan. Ich habe versucht einen Plan nach der Leiterplatte zu entwerfen. Fehlt noch einiges. Auch die Softwar fehlt. Vielleicht kann jemand helfen. mfg Thomas
Habe nach der Leiterplatte versucht den Schaltplan zu erstellen. Bin mir zwar nicht ganz sicher ob alles stimm, aber es sollte so sein. Leider habe ich die Software dafür nicht. Habe schon einige davon repariert. Meistens waren die Elkos defekt. Aber mit dem Controller kann ich leider nichts anfangen, da ich leider die Software dafür nicht habe.Programmieren könnte ich den mit einem GALEP5 den ich habe.Aber ohen hex-file leider nicht möglich
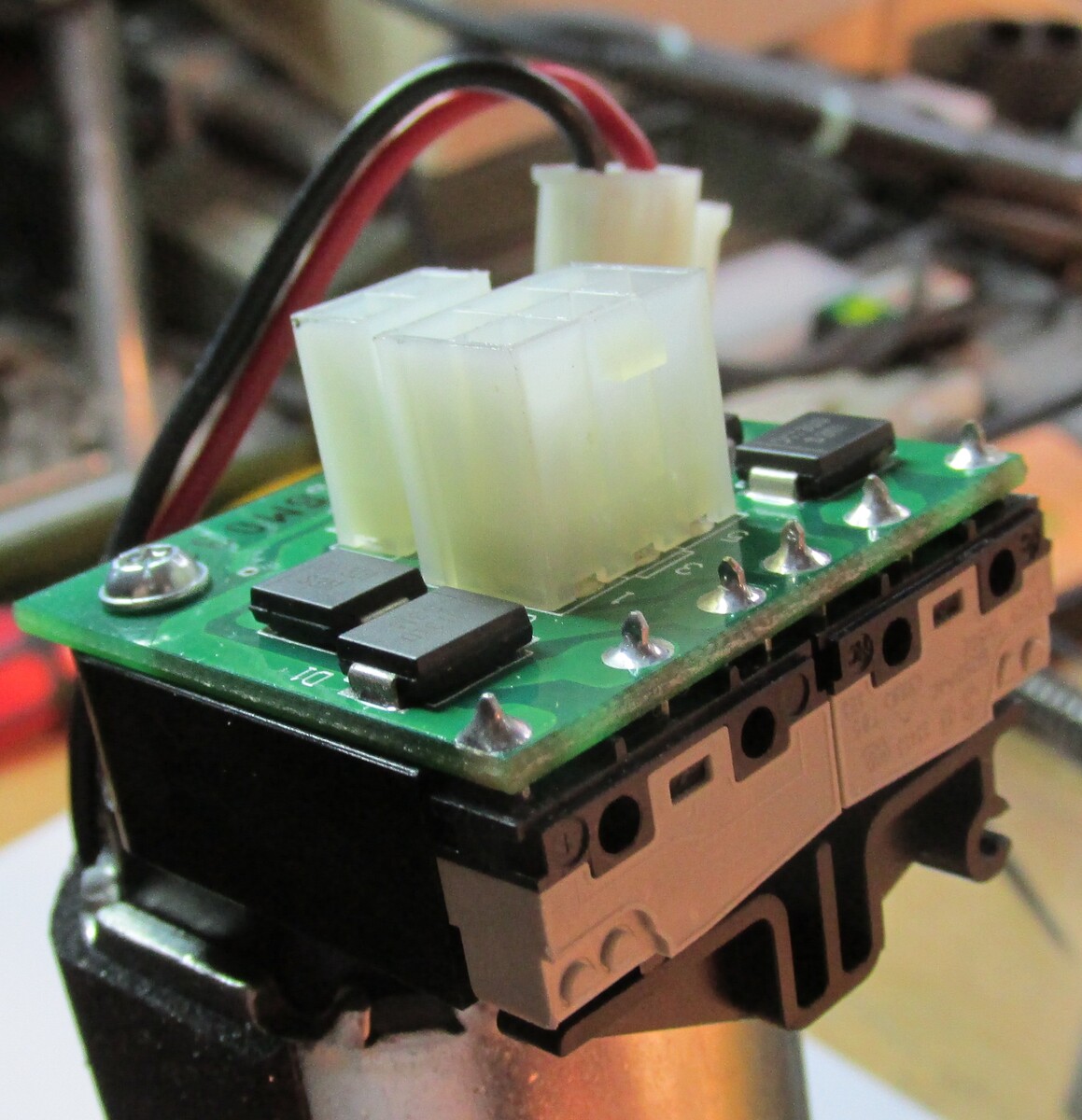
Hallo zusammen, ich habe mir letztens einen el-verstellbaren Tisch kostenlos gebraucht abgeholt (die elektrik funktioniert nicht mehr). Nachdem ich die Tisch-Steuerung (Datalogic, dieselbe wie von Thomas) mir genauer angeschaut hatte, nuja Alles schwarz, die Kondensatoren aufgeplatzt. Das einzige, was überlebte ist der RingkernTrafo. Ich habe mir jetzt selbst mit 2f Relais-Karte, arduino, und Makita 18V-Akkuadapter sowie original Bedien-Einheit eigene Steuerung gebaut. Diese funktioniert und auch mit den im Tisch eingebauten End-Schaltern sowie Quetsch-Schutz. Falls Jemand mehr Infos, Schaltplan sowie Code braucht: Melden.
Hallo, ich habe für den Hubtisch mit zwei Stellmotoren diese Schaltung mit einem Freund HJH entworfen. HJH hat die Software geschrieben. Die Steuerung (Leiterplatte) kann an Stelle der Originalplatine eingesetzt werden (gleiche Größe). Die Funktion sollte die gleiche sein. Als Prozessor wurde anstelle des PIC ein ATMEL verwendet In jeweils einem Fuß befindet sich ein Stellmotor (Gleichstrommotor 24V und zwei Hallgeber für die um 90 Grad versetzten Impulse sowie die Endschalter) Sollte ein Fuß in der Höhe ungleich des anderen sein wird durch drücken des Tasters die beiden Füße an den Endschalter gefahren und die Impulse auf null gesetzt. Somit fahren beide Füße gleich hoch.
Hallo Thomas, hast du eventuell mehr infos zu den Hallsensoren im Motor? Wie verhalten diese sich / Umdrehung? Mein DIY-Steuerung ist zZ nicht mit diesen verbunden, was ich aber demnächst machen möchte weil ich ähnlich wie Borislav auch die Höhe vergeben will und Memory-Funktion einfügen möchte. Hast du in deinem Tisch denselben Motor? Bei Mir ist nur einer im Mittel-Träger verbaut: Valeo 404.854, dieser dann per Getriebe und Zeilzug (Flaschenzug) den Tisch nur Runterzieht, Fürs Hochziehen sorgen 2 starke Gasdruckfedern in jeden Tischbein.
Angehängte Dateien:
-

tisch.jpg
230 KB -

IMG_2686.JPG
240 KB -

IMG_2661.JPG
200 KB



Hallo, der Schreibtisch sieht wie folgt aus. Auch ein paar Bilder vom Motor. Der Notor bewegt den Fuß über eine integrierte Zahnstange Morgen mehr!
Angehängte Dateien:
-

IMG_2672.JPG
220 KB
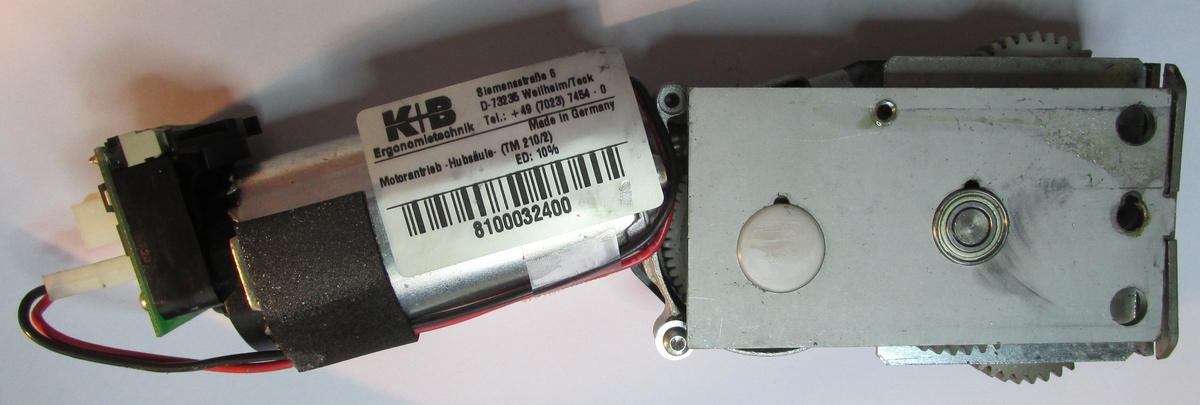
Hallo, der Hallsensor ist im Bild mit H1 und H2 zu sehen. Die Leiterplatte mit den Hallsensoren und den Dioden ist oberhalb des Motors zu shen. Der Motor hat ein Getriebe. Die Endschalter (grau) sind auf der Platine Die Sensorplatine und Kabelverbindung(Original siehe pdf)
Hallo Edi Kannst Du mir weiter Angaben zu Deiner Lösung geben? Ich habe ebenfalls einen defekten Stehtisch bekommen. So wies aussieht, ist die Kontrolleinheit (Datalogic, 2 Motoren) hinüber; das Bedienlelement funktioniert noch. Die Platine der Kontrolleinehit sieht aber noch unverseht aus; keine augenfälligen Defekte und so. gruss und danke Han-Lin
Han-Lin C. schrieb: > Hallo Edi > Kannst Du mir weiter Angaben zu Deiner Lösung geben? Ich habe ebenfalls > einen defekten Stehtisch bekommen. So wies aussieht, ist die > Kontrolleinheit (Datalogic, 2 Motoren) hinüber; das Bedienlelement > funktioniert noch. Die Platine der Kontrolleinehit sieht aber noch > unverseht aus; keine augenfälligen Defekte und so. > gruss und danke > > Han-Lin Ich hatte mal alle Elkos ausgewechselt. Danach funktionierten die meisten Steuereinheiten wieder! mfg Thomas
Hallo Han-Lin, Mein Tisch hat nur einen Motor, somit wunderbar mit dem 18V Akku zu betreiben. Die defekte Steuerung hatte aber Anschluss auch für einen 2. Motor gehabt. ist aber nicht in Benutzung gewesen. Ich denke wenn du eine 2. Relais-Platine dazu anschliesst..und quasi Parallel am 18V und die Schalteingänge einfach im Programm parallel ansteuerst, wirst du dann auch beide synchron zum laufen bekommen. Vielleicht müsstest du da in deinem Fall bei Neubau extra Sicherheitsabfrage am Motor ob dieser wirklich mitläuft, somit können schwere Schäden an der Mechanik (bei nicht Synchronem lauf) vermieden werden. Mit Drehgeber eventuell? Ich könnte dir dennoch meine Aktuelle Skizze dazu fertigen. ich hatte in letzten Monaten auch Überhaupt keine Zeit gehabt weiter dieses zu Entwickeln, wie z..B positionen per Drehgeber zu ermitteln. das kommt noch alles später..
Angehängte Dateien:
-

Hubtisch.png
730 KB
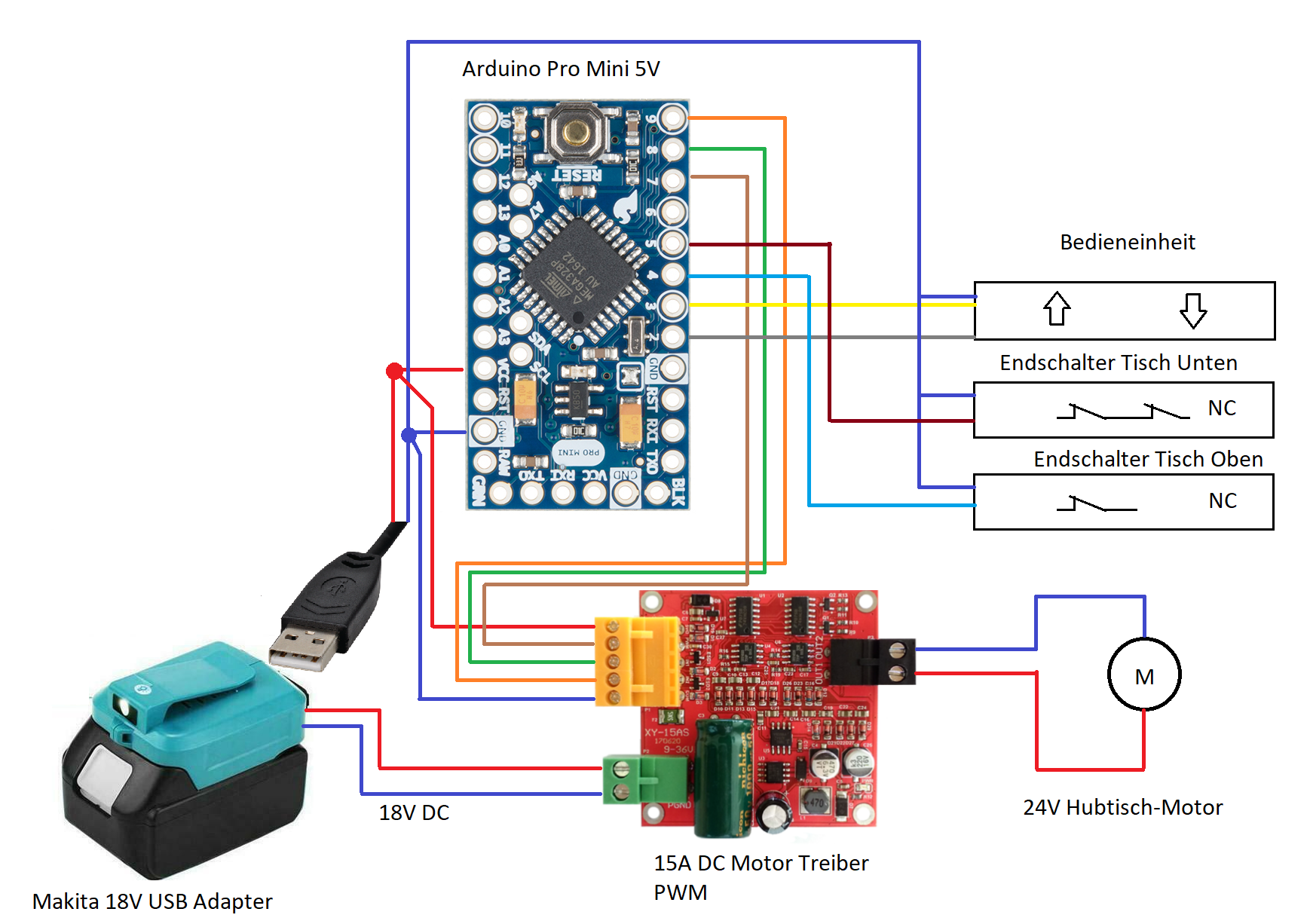
Hallo zusammen, Ich hab hier jetzt meine neue Version vom Selbstbau-Steuerung gemacht. Hoffe es ist Übersichtlich für alle. Relais-Platine hatte ich rausgeschmissen, weil der Tisch viel zu schnell fährt und zu "Hart" anhält. Mit dem Motortreiber geht dies nun etwas weicher. Gruss Edi
Angehängte Dateien:
-

20220703_170224.jpg
190 KB -

20220703_170315.jpg
230 KB
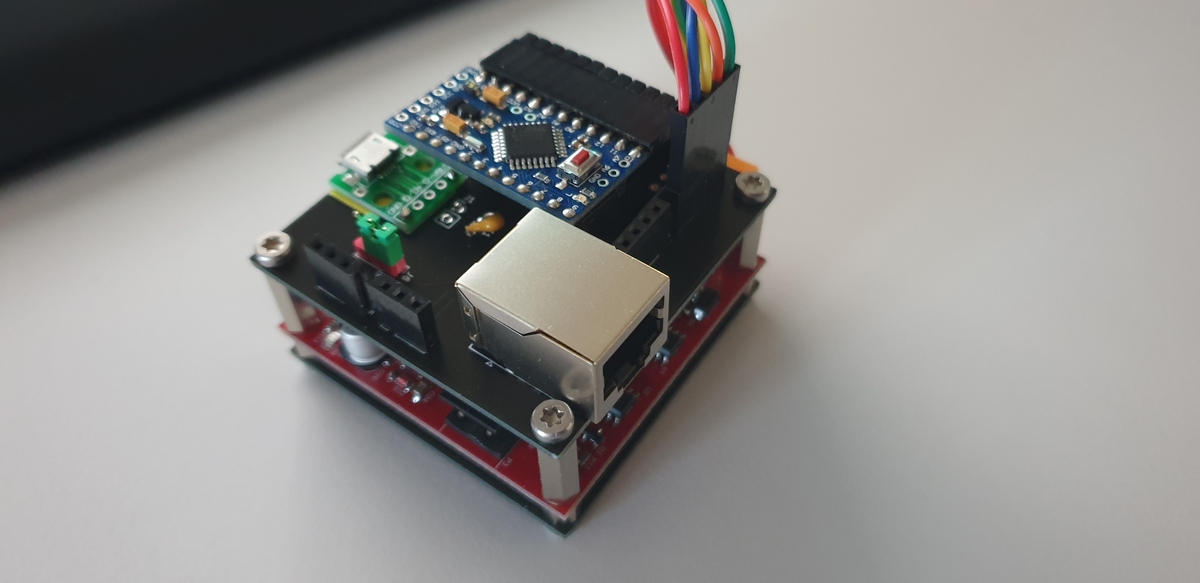

Hallo zusammen, meine Steuerung von Oben wurde nochmals überarbeitet, der Code neu angepasst sowie kleines Extra. Es wurde am Pult ein kleiner 10K Poti eingebaut für Geschwindigkeit, hinzu kommt dass der Motor nun per 20kHz PWM angesteuert wird, dieser ist deutlich Leiser und hat dennoch Drehmoment. Die Endschalter wurden am Tisch aufgetrennt, sodass Quetsch-Schutz eigene Funktion erhalten hat, wenn etwas zwischen Balken und Tischplatte befindet und der Taster gedrückt wird, wird die Funktion "Taster Runter" auf "Taster Hoch" in der Software umgedreht, und das eingeklemmte Objekt kann befreit werden. Es wird jetzt neu auch Impulse vom Motor eingelesen, bei mir sind es 1 impuls = 1mm Höhenunterschied. Die Software wird noch soweit angepasst, dass auch die Höhe gespeichert werden kann (EEPROM), per WLAN der Tisch angehoben werden kann und An & Abfahrrampen generiert werden für sehr weiches Anfahren / Abfahren bei grösseren Anfahrwegen.
Edi schrieb: > Hallo zusammen, > > ich habe mir letztens einen el-verstellbaren Tisch kostenlos gebraucht > abgeholt (die elektrik funktioniert nicht mehr). > Nachdem ich die Tisch-Steuerung (Datalogic, dieselbe wie von Thomas) mir > genauer angeschaut hatte, nuja Alles schwarz, die Kondensatoren > aufgeplatzt. > Das einzige, was überlebte ist der RingkernTrafo. > > Ich habe mir jetzt selbst mit 2f Relais-Karte, arduino, und Makita > 18V-Akkuadapter sowie original Bedien-Einheit eigene Steuerung gebaut. > > Diese funktioniert und auch mit den im Tisch eingebauten End-Schaltern > sowie Quetsch-Schutz. > > Falls Jemand mehr Infos, Schaltplan sowie Code braucht: Melden. Hallo Edi, hätte absolut Interesse an deinem kompletten Projekt um es nachzubauen. Wäre cool, wenn du mir alles rübergeben kannst. Vielen Dank
Hallo Zusammen, bin auf der Suche einer kompletten Schreibtischsteuerung für 2 Motoren, die ich von 0 aus aufbauen kann. Im Chat gibt es aj Beiträge, docgd a diese älter als 6 Monate sind kann ich da wohl nicht mehr direkt darauf antworten. (so sagt es mir jedenfalls die Webpage....) Daher diese Anfrage so pauschal. Über Antworten würd ich mich freuen. VG Frank
Angehängte Dateien:
-

Schema.JPG
88 KB
Frank B. schrieb: > Hallo Edi, > hätte absolut Interesse an deinem kompletten Projekt um es nachzubauen. > Wäre cool, wenn du mir alles rübergeben kannst. > Vielen Dank Hallo Frank, ich werde dir, und andere User, die Tage alle Sachen wo ich hab hierhin posten. Es hat sich etwas im Code verändert, sowie im Schema, da ich mir Platinchen aus Fernost bestellte. Ansonsten funktioniert mein Tisch super! bin mega zufrieden! 2 Motoren gleichzeitig anzusteuern ist nicht schwer, wen nes sich um linearantriebe handelt..wäre schön zu wissen welche Motoren und womit ansteuern möchtest... Gruss Edi
Es gibt zu dem Thema zwar mittlerweile schon einige Lösungen, vielleicht hat trotzdem jemand Verwendung für meine Adaptierung auf Basis der Lösung von boris_b. Die Idee war es meinen Tisch rein um den Automatiklauf zu erweitern, da mich das halten der Tasten geärgert hatte. Darüber hinaus besitzt mein Tisch kein Display mit Memory Funktion. (Ich weiß nicht ob die Verwendung eines Displays mit Memory Tasten den Automatiklauf zulässt. In einem Dokument von LOGICDATA habe ich gelesen das dieser nur in der USA freigeschalten ist.) Für meinen Code ist keine andere App/PC oder Smartphone notwendig. Meine Adaptierung basiert auch auf Arduino Pro Mini und verwendet nur die originalen HOCH/RUNTER Tasten des Tisches. Ich verwende einen Splitter um den Arduino parallel dem Handschalter anzuschließen. *Funktionen:* Bei einem Doppelklick fährt der Tisch auf die programmierte Höhe (jeweils für Stehen/Sitzen). Falls der Auffahrschutz auslöst, wird das Fahren (Ausgang HIGH) gestoppt. Mit den betätigen beider Tasten kann eine neue Steh- bzw. Sitzhöhe programmiert werden. Alles weitere findet ihr unter: https://github.com/michael2894/desk-control-logicdata Frohes Neues!
Hi, ich habe dein Projekt nachgebaut. Eine kleine Anmerkung. Bei mir musste D10 mit PIN 6 des DIN7 verbunden werden (so wie im original von Boris_b)
Sebastian schrieb: > Hi, > > ich habe dein Projekt nachgebaut. Eine kleine Anmerkung. Bei mir musste > D10 mit PIN 6 des DIN7 verbunden werden (so wie im original von Boris_b) Hi Sebastian, da hast du recht, ist korrigiert. Danke!
Hi, ich habe ebenfalls einen Schreibtisch von der Firma Palmberg mit einem LogicData COMPACT-e-3-O-V-EU Controller. Ich würde gerne die Funktion zum automatischen Hochfahren gerne nachbauen, aber leider ist mir das DIY Thema völlig neu. Ich versuche erstmal die benötigten Teile zu finden, was sich schon mal als eine Herausforderung versteht. Wenn ich das richtig verstanden habe, dann benötigt man eigentlich einen DIN-7 Splitter (oder Verlängerung?!) nach der DIN 45329, auch MAS 70 genannt? Es gibt scheinbar den Artikel ACS-CBL-HSY aber auch diesen finde ich nirgendwo zu kaufen. Könnte mir eventuell einer von euch helfen, woher man die Teile besorgt oder welche konkreten Teile man für das Setup benötigt? Ich wäre euch unendlich dankbar! Liebe Grüße, Josh
Hallo Josh, den 7-Pin DIN Splitter gibt es auf Amazon. (z.B.: https://www.amazon.de/poliges-Splitterkabel-Splitter-Verl%C3%A4ngerungsadapterkabel-Audioverbindungskabel/dp/B0BZH3SWQB) Wie sind denn deine Fähigkeiten im Löten bzw. Programmieren von Arduino? Für blutige Anfänger ohne jegliche Erfahrung wird es denke ich schwierig dieses Projekt umzusetzen. LG
Hallo Michael, vielen Dank für deine Hilfe! Beim Löten hilft mir ein Freund. Ich bin Softwareentwickler und würde mir daher die Programmierung zutrauen. Meine Unsicherheiten sind größtenteils im Bereich der Elektrotechnik. Hättest du noch einen Rat worauf ich beim Arduino achten sollte? Soweit ich das erkenne scheint das ja mehr oder weniger schon alles zu sein, was an Hardware benötigt wird? Liebe Grüße Josh
:
Bearbeitet durch User
Josh schrieb: > Hättest du noch einen Rat worauf ich beim Arduino achten sollte? Als Anfänger besser nicht die billigen Nachbauten kaufen.
Josh schrieb: > Soweit ich das erkenne scheint das ja mehr oder weniger schon alles zu > sein, was an Hardware benötigt wird? Du brauchst: -) den Splitter -) einen männlichen 7-Pin DIN Stecker zum Löten (z.B.: https://www.amazon.de/QUARKZMAN-S-Video-Stecker-Signal%C3%BCbertragung-Computer/dp/B0F3XYZQ6Q) Den Arduino Pro Mini gibt es nicht mehr als original, du kannst aber auch einen vergleichbaren nehmen (z.B. Nano)
Perfekt vielen Dank! Das hilft mir sehr. Ich hätte jetzt diesen [Arduino](https://www.amazon.de/Arduino-Kompaktplatine-ATmega4809-Mikrocontroller-elektronische-Heimwerkerarbeiten/dp/B07VX7MX27) gekauft. Nur noch zwei kurze Fragen: 1. Für das Verlöten werden Dupont-Kabel benötigt, richtig? 2. Muss man das Arduino noch auf einem Board / in einer Box befestigen? Nochmals vielen lieben Dank!
Hättest mal besser keinen Arduino nehmen sollen. Das "lockt" das falsche Klientel an, wie man hier gut sieht.
Beitrag #8023739 wurde von einem Moderator gelöscht.
Bitte melde dich an um einen Beitrag zu schreiben. Anmeldung ist kostenlos und dauert nur eine Minute.
Bestehender Account
Schon ein Account bei Google/GoogleMail? Keine Anmeldung erforderlich!
Mit Google-Account einloggen
Mit Google-Account einloggen
Noch kein Account? Hier anmelden.