Hallo, ich habe eine Verständnisfrage zum Artikel BLDC Controller: https://www.mikrocontroller.net/articles/Brushless-Controller_f%C3%BCr_Modellbaumotoren#Hardware Im Artikel wird eine Beispiel-Schaltung für eine Ansteuerung des Treibers IR2104 mit einem PWM Kanal gegeben. Dabei wird das PWM Signal auf IN_A gelegt und nicht auf SD_A. Laut Datenblatt wird IN_A benutzt um zwischen High und Low Side umzuschalten, während SD shut down ist, also beide Mosfets ausschaltet. Wenn nun also PWM an IN_A liegt, dann wird doch im PWM-Takt zwischen high und low umgeschaltet, anstatt entweder high oder low zu schalten. Müßte PWM nicht korrekterweise mit SD_A statt IN_A verbunden sein?
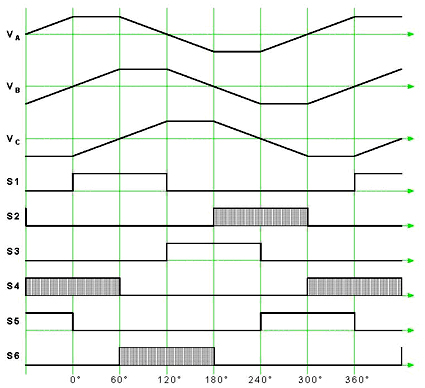
Marc schrieb: > ...Müßte PWM nicht korrekterweise mit SD_A statt IN_A verbunden sein? Also für mich geht es so in Ordnung, zusammen mit dem Bild für die 6 Phasen - Du kannst Dir die PWM ja auch als HIGH vorstellen (Spezialfall - Vollgas) - dann versteht es sich leichter.
Hallo Rainer, danke für die Antwort! Mir ist aber immer noch nicht klar, warum das mit einem IR2104 funktionieren kann. Für mich macht das weiterhin nur bei einem IR2101 Sinn. Wenn man bei dem IR2101 die PWM auf den Pin 2 legt, dann schaltet man den high side MOSFET an und aus. Auf der low side der gegenüberliegenden ("ableitenden") Phase braucht man keine PWM, denn die bleibt einfach eingeschaltet um die Schaltverluste zu vermeiden. Da macht dann Deine Antwort für mich Sinn die PWM als HIGH anzusehen. Aber bei einem IR2104 ist die Logik eine andere, hier schaltet Pin 2 nicht den high side MOSFET sondern wählt zwischen high und low side, während Pin 3 (SD) an und ausschaltet. Das angenehme am IR2104 ist halt, dass er shoot through protection hat, was es eben beim IR2101 nicht gibt. Ich würde daher den IR2104 bevorzugen, aber nur wenn er in der Schaltung funktioniert wie vorgesehen.
Wenn ich dein Vorhaben richtig verstehe, dann möchtest du einen 3-Phasen permanent-erregten Synchronmotor betreiben, wobei die drei Phasen einen gemeinsamen (internen) Sternpunkt haben. Du hast also in Summe drei Anschlüsse für die "Spulen", die du ansteuern musst. Jeden der drei Anschlüsse musst du gezielt mit der positiven (V+) oder der negativen (V-) Versorgungsspannung verbinden können. Dafür brauchst du, je Phase, zwei Leistungsschalter. Einen, um die Phase mit V+ und einen, um die Phase mit V- zu verbinden. Nennen wir sie Top- und Bottom-Schalter. Sinnigerweise dürfen Top- und Bottom-Schalter nie gleichzeitig geschlossen sein, da du sonst einen Kurzschluss von V+ nach V- hättest. Wenn du nun mit einer PWM eine dieser Phasen ansteuern möchtest machst du nichts anderes als umzuschalten welcher der beiden Schalter geschlossen ist. Sie sind nie beide geschlossen und einer ist immer geschlossen. Man kann auch sagen: "Die Schaltzeit von Schalter-Top ist identisch zu Eins Minus Schalter-Bottom Minus zweimal Totzeit". In deinem Fall bräuchtest du also drei IR2104 und drei PWM-Ausgänge des MCUs. Du würdest nur z.B. die PWM für die Top-Schalter berechnen und ausgeben. Der IR2104 sorgt dann dafür, dass der Bottom-Schalter immer dann eingeschaltet wird, wenn Top (sicher) aus ist (Totzeit Berücksichtigung). Hoffe dir damit geholfen zu haben... Viele Grüße, Alex
Angehängte Dateien:
-

bldc-pwm-pattern-double.png
35 KB -

bldc-pwm-single.png
77 KB
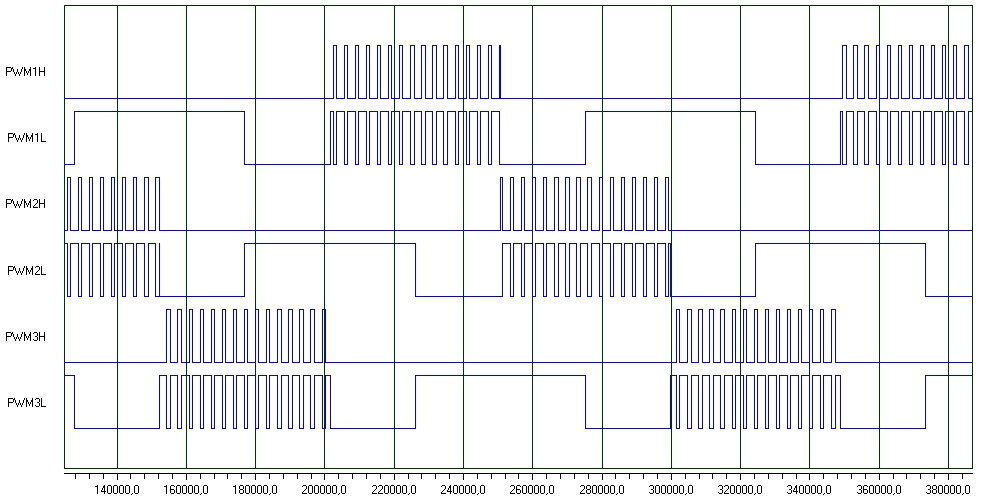
Hallo Alex, vielen Dank!! Es war mir nicht klar, dass man bei der Phase die an V+ liegt die low side invers zur high side schaltet. Dein Beitrag hat mich veranlasst mal in das Datenblatt eines fertigen BLDC Controller Chips zu gucken (statt nur App Notes von Microcontroller Herstellern). Und siehe da, die Erleuchtung kam... ;) Das Stichwort ist Sync Rectification und die low side wird geschaltet um die Body Diode zu entlasten. Ich habe mal zwei anschauliche Dateien angehängt, falls später jemand mit dem gleichen Problem vorbeikommt: einmal mit invers PWM auf der low side - zum schonen der low side body diode und einmal ohne. Da auf der body diode 0,7V-1,2V abfallen, entsteht bei 10A ganz kräftig Verlustwärme. Das schlechte Beispiel stammt aus einem Artikel über BLDC von embedded.com... Vielen Dank nochmals und schönes Wochenende! Marc
Ich bin zwar erst dabei mich einzuarbeiten, aber allgemein ist es nicht unbedingt notwendig die Low-Side mit der inversen PWM anzusteuern. (auch wenn es im Artikel gemacht wird) Ich kann dieses Dokument http://www.mdpi.com/1424-8220/10/7/6901/pdf (Position and Speed Control of Brushless DC Motors Using Sensorless Techniques and Application Trends) empfehlen, zwar werden oft auf Artikel http://ieeexplore.ieee.org (kostenpflichtig) verwiesen, aber troztdem enthält es sehr detailierte Infos zur Ansteuerung.
Bitte melde dich an um einen Beitrag zu schreiben. Anmeldung ist kostenlos und dauert nur eine Minute.
Bestehender Account
Schon ein Account bei Google/GoogleMail? Keine Anmeldung erforderlich!
Mit Google-Account einloggen
Mit Google-Account einloggen
Noch kein Account? Hier anmelden.