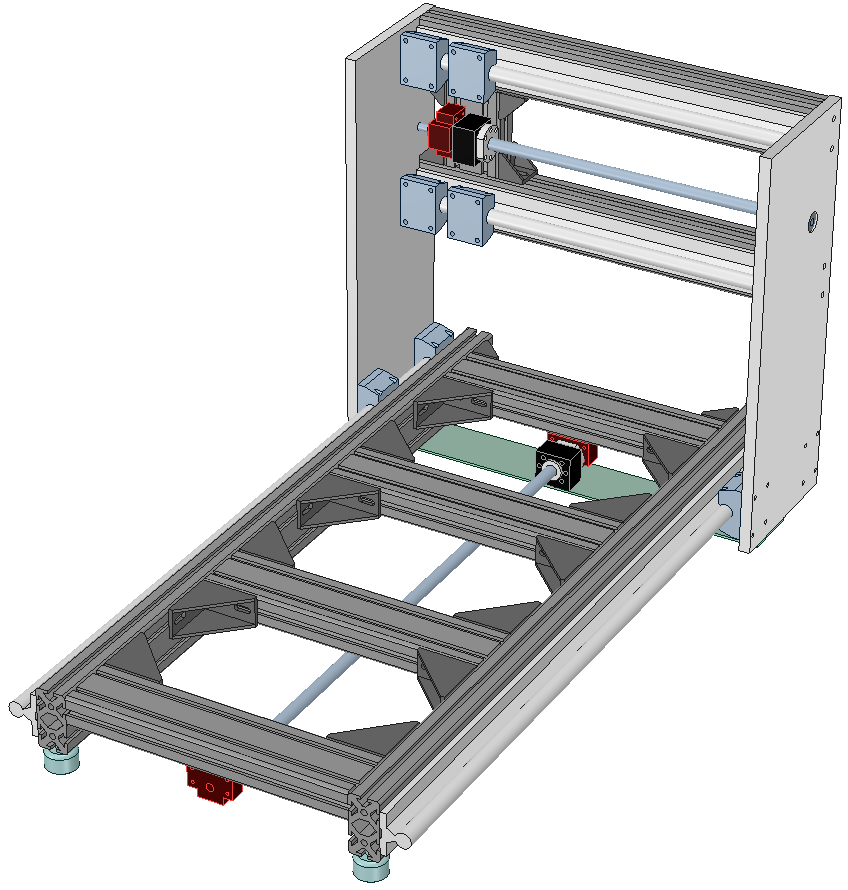
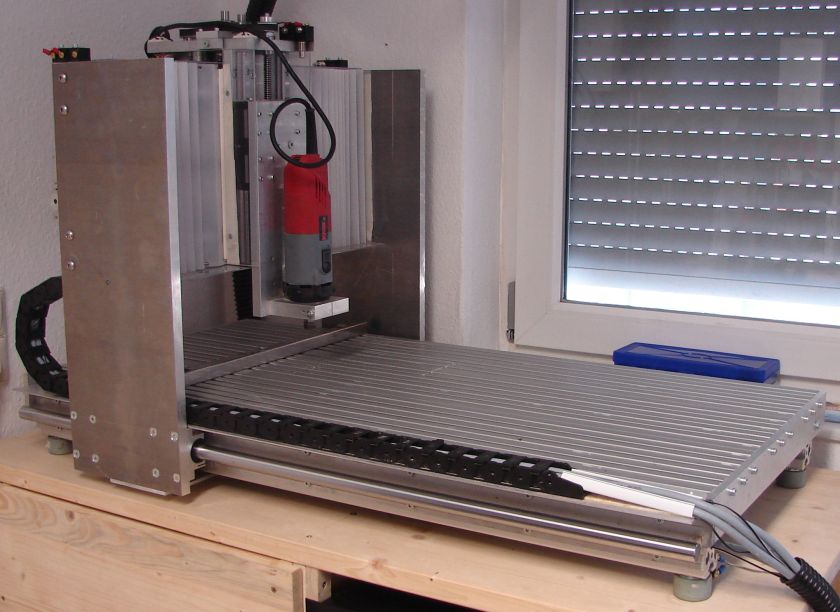

Hallo Community, ich habe in den letzten Monaten eine CNC-Fräse entworfen und gebaut. Da mir das ohne all die anderen Bauberichte und Tipps kaum gelungen wäre, habe ich auch mein Projekt anschließend dokumentiert und meine Erfahrungen und Überlegungen aufbereitet. Das Ganze ist wie die meisten meiner Projekte auf meine Webseite beschrieben und bebildert. Hier in das Unterforum Mechanik und Werkzeug setzte ich mal die Links zur Mechanik und zum Zubehör. http://digital-nw.de/CNC-Mechanik.htm http://digital-nw.de/CNC-Zubeh%C3%B6r.htm Die Eckdaten der Fräse: Stellfläche: 110 cm x 60 cm Bearbeitungsfläche: 79 cm x 43 cm Gewicht: ca. 70 kg Führungen: Unterstützte 20-mm-Wellen (X/Y) und Linearschienen (Z) Antrieb: Kugelumlaufspindeln (X/Y) und Trapezgewindespindeln (Z) Preis für die Mechanik: ca. 1500€ Arbeitszeit: nicht gemessen, vermutlich 200-300h Über Feedback würde ich mich freuen. Bitte auch Bescheid geben, wenn ich auf meiner Seite irgendeinen Blödsinn geschrieben habe. Ich will ja niemandem falsche Tipps geben. Beim Zubehör empfehle ich jedem der eine Werkstatt hat sich mal den Zyklonabscheider anzuschauen. Auch abseits der Fräse ist diese schnell gebaute Bastelei eine echte Hilfe für mich und reduziert die Zeit fürs Putzen der Werkstatt deutlich. @Mods: Das Ganze war ein Großprojekt bei dem Mechanik, Elektronik und Software entwickelt wurde, weshalb ich die einzelnen Teile in die jeweiligen Unterforen posten möchte. Wenn das zu viel gespamme ist, bitte Bescheid sagen.
Angehängte Dateien:
-

Antriebe.png
70 KB -

FraeseGesamtFoto.jpg
77 KB -

Faltenbalg.jpg
55 KB -

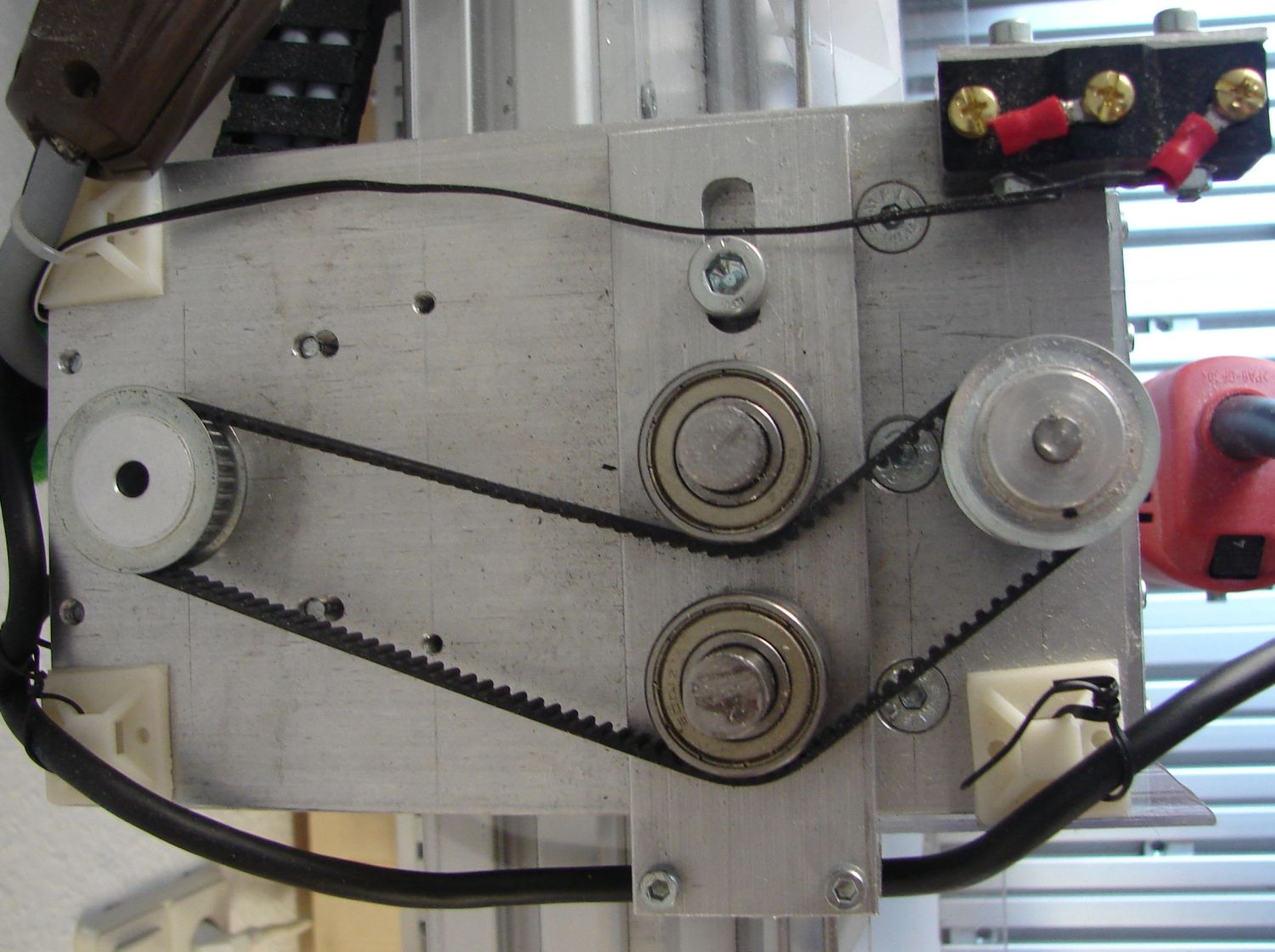
ZAchsenRiemenspanner.jpg
180 KB
Angehängte Dateien:
-

Motortreiber.jpg
69 KB -

SchaltkastenInnen.jpg
150 KB -

CNCSteuerungTop.png
65 KB

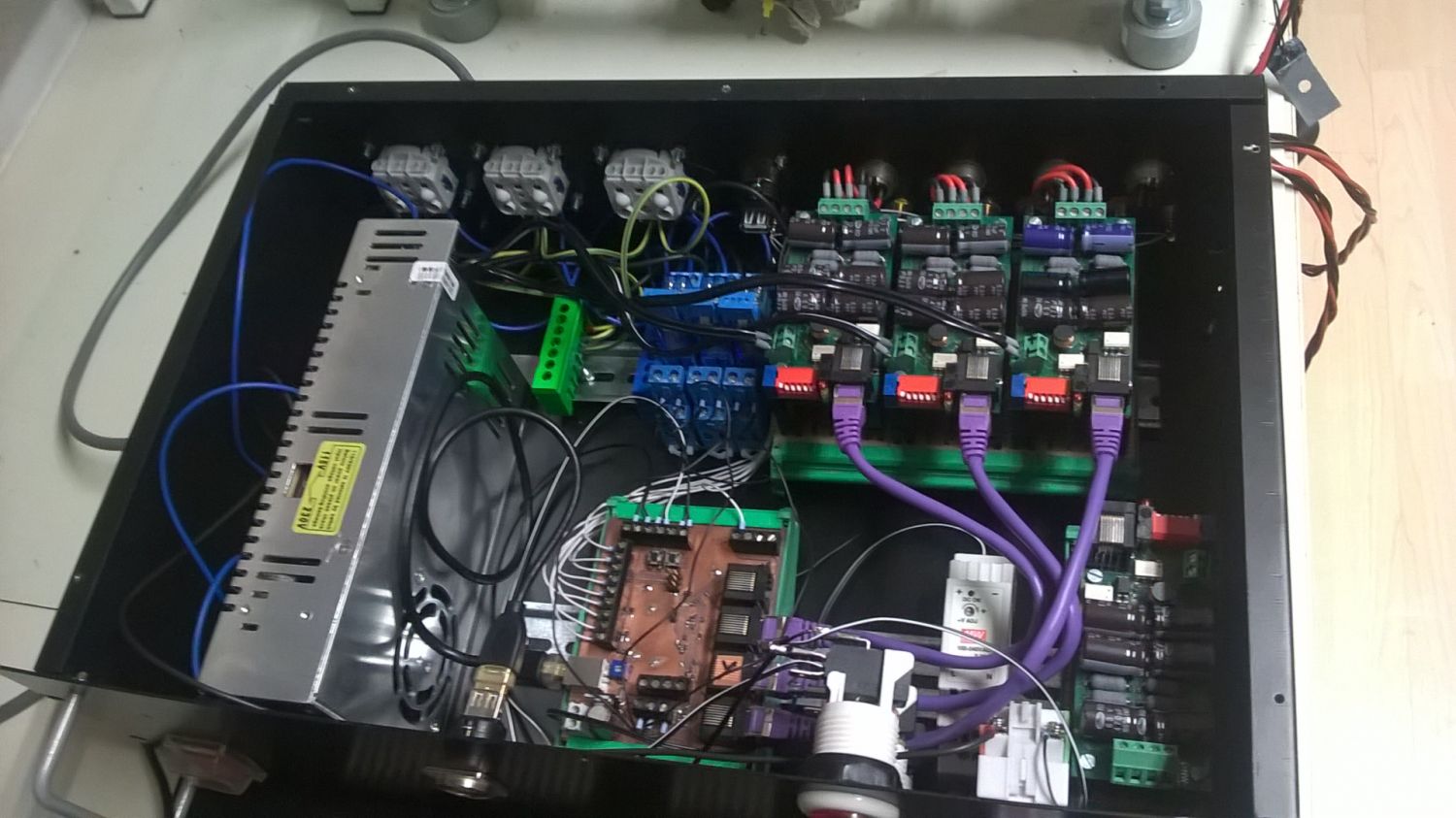
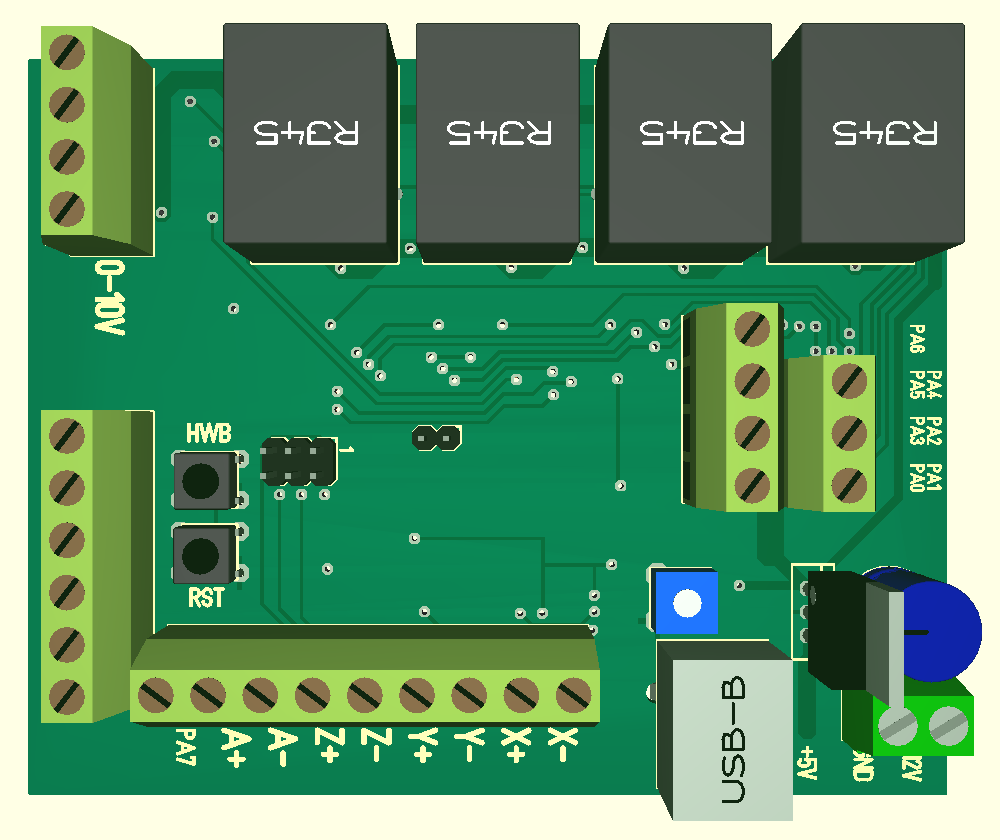
Hallo, im Zuge meines Fräsenbauprojekts Beitrag "CNC-Fräse gebaut [fertig] mit Mechanik, Motorsteuerung, GRBL und mehr" habe ich die Elektronik für eine CNC-Fräse entwickelt und gebaut. Das Ganze ist wie die meisten meiner Projekte auf meine Webseite beschrieben und bebildert. http://digital-nw.de/CNC-Elektronik.htm Die Treiber basieren auf Allegro A4989 Schrittmotortreibern, sind galvanisch von der Steuerung getrennt und aber Funktionen wie eine automatische Stromabsenkung und einen Übertemperaturschutz. Letzterer funktioniert leider nicht ganz :-). Die Steuerung basiert auf einem AT90USB1286 auf dem eine von mir Modifizierte Variante von GRBL läuft. Die Steuerung hat Eingänge für 9 Endschalter, 3 Steuertaster sowie 7 digitale Ausgänge mit Relaistreibern und zwei analoge 0-10-V-Ausgänge. Das Ganze ist mit Netzteilen und Not-Aus-Schalter und in einem 19-Zoll-Metallgehäuse untergebracht. Über Feedback würde ich mich freuen. Bitte auch Bescheid geben, wenn ich auf meiner Seite irgendeinen Blödsinn geschrieben habe. Ich will ja niemandem falsche Tipps geben. @Mods: Das Ganze war ein Großprojekt bei dem Mechanik, Elektronik und Software entwickelt wurde, weshalb ich die einzelnen Teile in die jeweiligen Unterforen posten möchte. Wenn das zu viel gespamme ist, bitte Bescheid sagen.
Philipp M. schrieb: > weshalb ich die einzelnen Teile in die jeweiligen Unterforen posten > möchte. Wenn, dann gesammelt in einem Thread unter "Projekte", aber nicht wild verstreut.
Philipp M. schrieb: > weshalb ich die einzelnen Teile in die jeweiligen Unterforen posten > möchte Nicht machen. Packs zusammen in einen Thread unter "Projekte". Das reicht.
Angehängte Dateien:
-

DNW_CNC_Control.png
96 KB
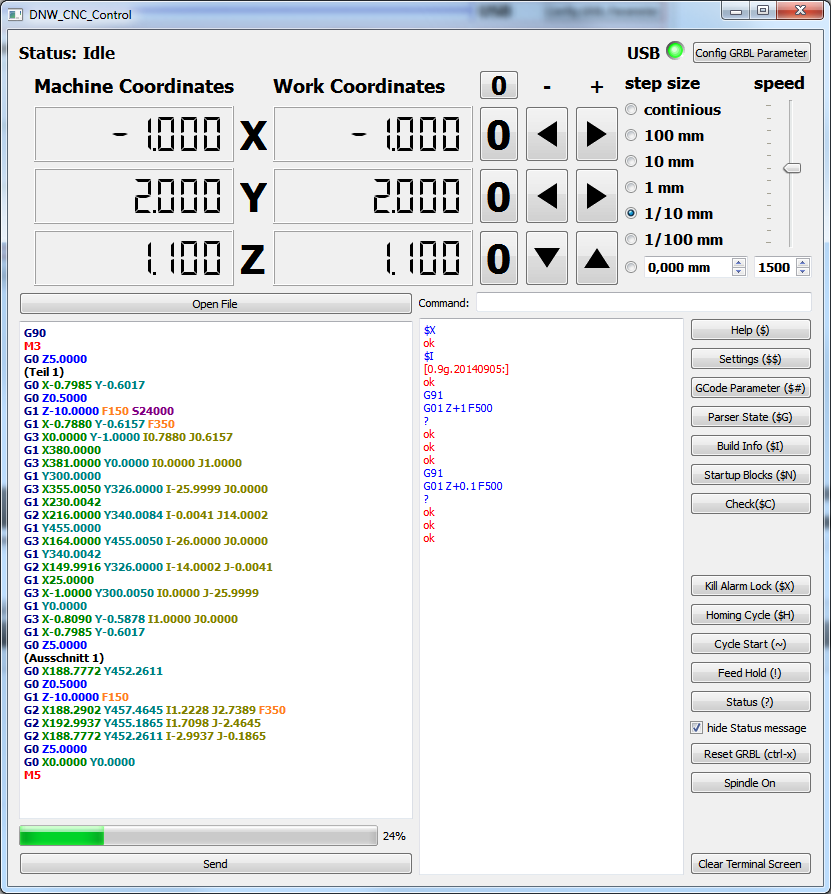
Hallo, Für meine neue CNC-Fräse Beitrag "CNC-Fräse gebaut [fertig] mit Mechanik, Motorsteuerung, GRBL und mehr" musste ich mir eine eigene Version von GRBL anpassen, die die USB-Funktionalität und die zusätzlichen IO-Pins eines AT90USB1286 nutzen kann. Im Zuge dessen habe ich auch eine eigene PC-Steuersoftware in Qt geschrieben, da die bisher verfügbaren mit dem modifizierten GRBL nicht arbeiteten und auch meinen Anspruch an Schlankheit und Übersichtlichkeit des Codes nicht ganz erfüllten. Die Software hat ca. 1500 Zeilen Code und enthält alles was zum Steuern einer GRBL-CNC-Fräse nötig ist. -Verfahren der Fräse inkl. richtigem Jogging -Gamepadunterstützung zum Verfahren (derzeit nur für Windows) -G-Code-Synthaxhighlighting -Konfiguration der GRBL-Parameter -Auswerten und Anzeigen der Statusmeldungen (Positionsdaten) Das Ganze ist wie die meisten meiner Projekte auf meine Webseite beschrieben und bebildert. Dort kann man auch die Software (Quellcode) downloaden. http://digital-nw.de/CNC-Software.htm Über Feedback würde ich mich freuen. @Mods: Das Ganze war ein Großprojekt bei dem Mechanik, Elektronik und Software entwickelt wurde, weshalb ich die einzelnen Teile in die jeweiligen Unterforen posten möchte. Wenn das zu viel gespamme ist, bitte Bescheid sagen.
Mhh jetzt hab ich das schon gepostet. Soll ich das rückgängig machen? Wenn ja, wie? Ich dachte mir, dass es so vllt. besser gefunden wird bei der Suche. Es ist ja nicht nur eine Projektvorstellung sondern auch z.B. Open-Source-Code, den man runterladen kann, bzw. Schaltplanausschnitte. Mir viel da einfach keine passende Titelzeile ein, in der ich dann alle Stichwörter unterbringen kann, damit sie in der Suche auffindbar sind. Das ganze waren halt doch irgendwie 3 Projekte in einem^^. Und ich hab echt viel Zeit und Mühe in die Doku gesteckt. Da wünsch ich mir halt schon, dass ich möglichst viele Leser erreiche ;-)
min schrieb: >>>Welchen Sinn haben die ganzen Winkel im Grundgestell? > Stabilität Die fehlt allerdings der Z-Achse völlig.
min schrieb: > Stabilität Darauf zielte die Frage ab: welche? Ich denke, dass dort gar keine Biegemomente auftreten, denn die Kraft wird entlang der Spindel "fließen".
Ja, die Winkel wurden in jede freie Ecke gesetzt um das ganze so steif wie Möglich zu machen. Auf das teilweise füllen der Profile mit Sand wurde allerdings erstmal verzichtet. Bastler schrieb: > Die fehlt allerdings der Z-Achse völlig. Verglichen mit dem Grundgestell vermutlich schon. Was wären deine Vorschläge? Eine zweite Querverstrebung zwischen den beiden Schienenträgern der X-Achse? Die eine dient ja mehr dazu das Lager der Spindel zu halten.
Info schrieb: > Ich denke, dass dort gar keine > Biegemomente auftreten, denn die Kraft wird entlang der Spindel > "fließen". Bei der Fräse kommen da durchaus auch Querkräfte vor ;-)
Hallo, leider kann ich DNW_CNC_Control.zip von deiner Seite nicht runterladen, ich würde es mir gerne mal angucken. Wäre es viel Aufwand das Programm auf das 'ursprüngliche' GRBL für ATmega328 umzuschreiben (mit der entsprechenden 'original' Kommunikation)? Gruß Sven
Hi, hab ich Trottel doch glatt vergessen die Dateien auch hochzuladen :-). Jetzt sollte es gehen. Nein der Aufwand wäre nicht groß. Man müsste nur den GRBL-Controller zyklisch nach dem Status fragen. Entweder in extra Timer-Slot oder dem der ohnehin existiert. Und beim Senden muss man vielleicht einen Fifo oder etwas Ähnliches einbauen damit nicht zu viel auf einmal gesendet wird. Aber da bin ich mir nicht sicher vielleicht geht es auch so. Der original Arduino hat ja auch USB und das handelt das ja irgendwie von selbst.
Schönes Projekt. Der (neue) Titel ist nur ein Provisorium, den kannst und sollst Du Dir natürlich selber aussuchen.
Hallo Philipp, Philipp M. schrieb: > Über Feedback würde ich mich freuen. schönes Projekt, danke fürs Zeigen. Eine Sache ist mir aufgefallen: Die zweite (untere) Spannrolle des Z-Achsen-Riemenspanners ist nicht profiliert. Dadurch wird der Zahnriemen (genauer: die Zähne) bei Bewegung ständig gewalkt (vorzeitiger Verschleiß bzw. Längung des Riemens) Abhilfe: Austausch der unteren Spannrolle mit einer Zahnriemenscheibe oder die untere Spannrolle weglassen und einen kürzeren Zahnriemen einbauen. Dirk
Philipp M. schrieb: > Die Treiber basieren auf Allegro A4989 Schrittmotortreibern, sind > galvanisch von der Steuerung getrennt und aber Funktionen wie eine > automatische Stromabsenkung und einen Übertemperaturschutz. Letzterer > funktioniert leider nicht ganz :-). Ich habe die Endstufe auch gebaut (auch mit dem Vorgänger A3986) mit ext. Treiber (IR2011). Es funktioniert auch, nur im unteren Drehzahl bzw. bei einzelnem Schritt macht mir der Chip von Allergo im Microstepp Kopfschmerzen: Der hält den Winkel nicht genau, d.h. die Stromreglung ist bei dem Chip unpräzise. Erst die Spannung anhand der Motordaten angepaßt wurde, läuft der Motor einigermaßen zufrieden. Vielleicht habe ich misst gebaut, hast du da nen Schaltsplan für mich? Ansonsten ist der Unterschied zu TB6600 wie Tag und Nacht :-)
Mein Schaltplan entspricht ziemlich genau dem Vorschlag aus dem Datenblatt. Ich nutze IRF7351 als Externe-FETs und zusätzlich 3A 60V Shottkydioden parallel zu den parasitären Dioden der FETs. Was mir auch auffiel ist das die Treiber bei zu niedrig eingestelltem Strom nicht sauber lief und die einzelnen Schritte im bei Einzelschrittansteuerung nicht gleichmäßig groß waren (nutze 16-Fach-Mikrostepping). Als ich den Strom dann aufgedreht habe (Referenzspannung kommt über Poti) lief es irgendwann einwandfrei. Das Ding ist für große Motoren ausgelegt (bis 10 A) und sollte bei kleineren vermutlich nicht verwendet werden. Für bis zu 2 A gibt es von Allegro ja den A4988 der alle FETs intern hat. Mit den TB6600 habe ich keine Erfahrung mein Vorgängerprojekt nutze die klassische L297-L6203-Kombination.
Angehängte Dateien:
-

DNW_CNC_1_23.png
130 KB
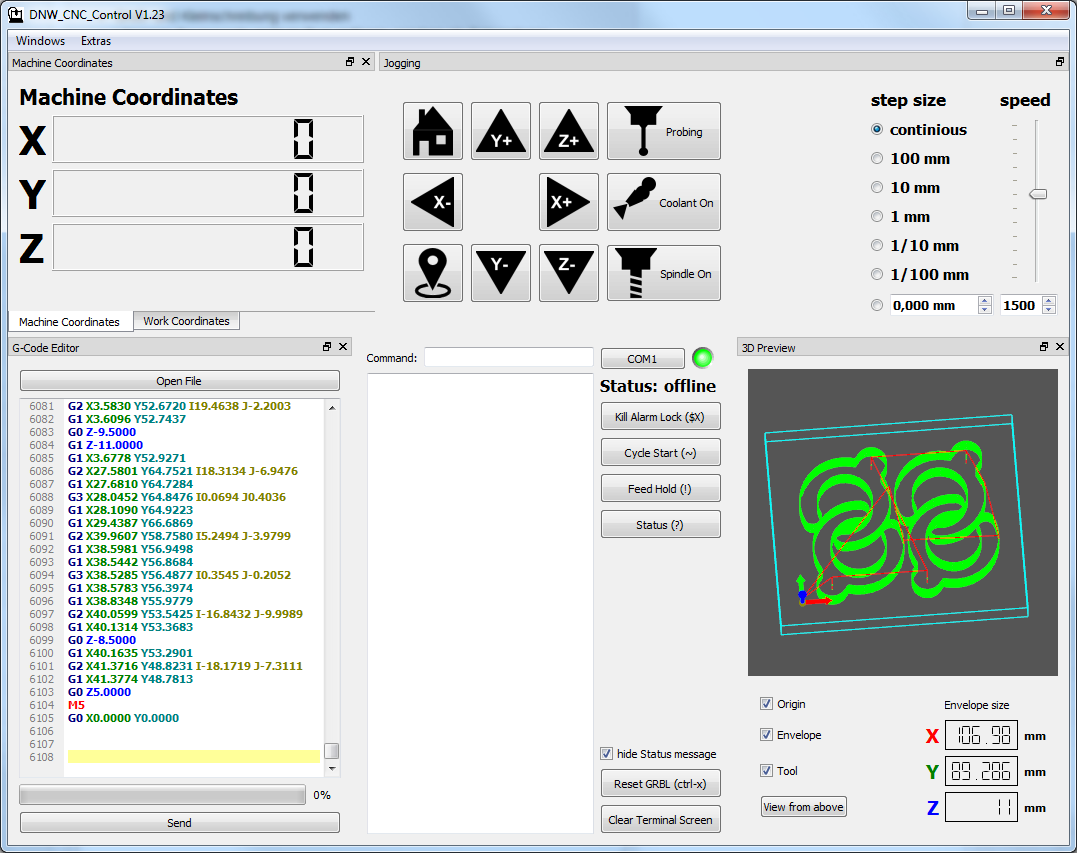
Hallo Community, ich wollte mal ein kleines Update geben. Die Steuersoftware hat sich seit meinem ursprünglichen Post ordentlich weiterentwickelt und ist jetzt vor allem auch direkt mit Standard-GRBL kompatibel. Neue Features sind: -3D-Vorschau des G-Codes -Gamepad-Support mit frei belegbaren Tasten -Anpassbare Benutzeroberfläche -Support für Standard-GRBL-Controller. -Kühlmittel-Kontrolle -Icons auf den Buttons Trotzdem ist es weiterhin ein schlankes Programm ohne unnötigen Schnickschnack. Funktionen die man nicht braucht kann man ausblenden, so dass man auch auf kleinen Bildschirmen die Übersicht behält. Ich habe meine Fräse selbst lange Zeit mit einem kleinen Netbook gesteuert. Lauffähiges Windows-Programm sowie Quellcode und QT-Projektdateien kann man hier herunter laden: http://digital-nw.de/CNC-Software.htm Viel Spaß damit.
Bitte melde dich an um einen Beitrag zu schreiben. Anmeldung ist kostenlos und dauert nur eine Minute.
Bestehender Account
Schon ein Account bei Google/GoogleMail? Keine Anmeldung erforderlich!
Mit Google-Account einloggen
Mit Google-Account einloggen
Noch kein Account? Hier anmelden.