Hallo Zusammen, im Moment bin ich gerade dabei, einen sehr einfachen Roboter für Workshops mit einem ARDUINO Nano zu bauen. http://www.roboterclub-freiburg.de/freiBot/freiBot.html Falls jemand Kurse für Schüler oder Studenten machen will, könnte das Design geeignet sein. Ziel war es, die Teilekosten möglichst niedrig zu halten und auch die Bauzeit soll nicht allzu lange sein. Der Roboter besteht im wesentlichen aus einem ARDUINO NANO, L293D, 2 Motoren und zwei LEDs. Zusätzlich können natürlich andere Sensoren angeschlossen werden. Wer also mit basteln will oder selbst ein paar Verbesserungen hinzufügt, ist gerne willkommen. Viel Spaß damit, chris_
Upps, leider wurde das Verzeichnis verschoben, jetzt stimmt es: http://roboterclub-freiburg.de/projekte/freiBot/index.php
OffTopic: Ich habe mal auf die anderen Projekte auf der obigen Seite geschaut. Unter http://roboterclub-freiburg.de/projekte/mega8cam/index.php liest man: "Da die Bildwechselfrequenz bei einem Videosignal 50Hz beträgt, dauert die Aufnahme einer Bildspalte also 20ms. Will man mehre Spalten aufnehmen, um sie zu einem Bild zusammenzufügen, dauert der Vorgang also n*20ms. Für ein Bild mit 350 Spalten werden nach diesem Verfahren also 350*30=7 Sekunden benötigt." Das ist natürlich total daneben. Denk mal drüber nach.
Ich finde ein L293D und Batteriebetrieb vertragen sich nicht. Schau' doch mal nach, ob sich da nicht was Aktuelleres findet. Aus meiner Sicht gehört der L293D ins Museum. Auch wenn er sich noch immer reger Präsenz, im Netz, erfreut.
Amateur schrieb: > Ich finde ein L293D und Batteriebetrieb vertragen sich nicht. Schau' > doch mal nach, ob sich da nicht was Aktuelleres findet. Naja, bei "all outputs low" frißt der typischerweise 37 mA und bei "all high" 27 mA und bei "all Z" 10 mA, das ist natürlich schon recht viel. Aber bei so einer kleinen Robotikanwendung verbraten die Motoren doch um Größenordnungen mehr Energie, oder? Spielt es eine Rolle, ob die Batterie deswegen nur 290 Sekunden statt 300 Sekunden hält? > Aus meiner Sicht gehört der L293D ins Museum. Auch wenn er sich noch > immer reger Präsenz, im Netz, erfreut. Habe gerade mal beim großen F geschaut, da ist der L293 der einzige in seiner Klasse mit einem bastel- und steckbrettfreundlichen DIP-Gehäuse. Vielleicht hast Du ja eine Empfehlung? Danke.
Bastler schrieb: > Das ist natürlich total daneben. Denk mal drüber nach. wenn du im Text ein paar Zeilen weiter gelesen hättest wäre dein Kommentar nicht so total daneben
Walter S. schrieb: > wenn du im Text ein paar Zeilen weiter gelesen hättest wäre dein > Kommentar nicht so total daneben Die Erklärung ist und bleibt Unsinn, egal was danach kommt und ich finde nichts, was die richtigstellen würde.
Meine Suche bei "F" hat mehrere IC's ergeben. Allerdings sollte man nicht nur nach DIL suchen. Bevor man bei SMD landet gibt es einen Haufen andere "lötbare" Gehäuse. Interessanterweise interpretiert "F" TO 220 auch mit mehr als 3 Anschlüssen. Auch die SIL-Fraktion hat einiges zu bieten. Meine Abneigung gegen den L293D besteht nicht nur wegen des hohen Ruheverbrauchs, sondern auch wegen der hohen Arbeits-/Schaltverluste. Diese sollten mehr als "10 Sekunden" ausmachen.
Ja, so richtig Toll ist der L293D mit seinen elektrischen Spezifikationen nicht. Er ist aber einigermaßen kostengünstig und man kann ihn auch ohne zu löten in ein Breadboard stecken. Dann lässt sich der Roboter auch ohne Löterfahrung bauen. Mit dem L293D bekommt man eine ziemlich minimalistische Motorsteuerung: L293D, Arduino, Motoren, 9V Block .. fertig. ( .. + 2 Kondensatoren .... ) Wenn jemand eine besser Lösung hat, immer her damit. Ist ja ein "Open Source" Projekt.
Hallo, Won K. schrieb: > Walter S. schrieb: >> wenn du im Text ein paar Zeilen weiter gelesen hättest wäre dein >> Kommentar nicht so total daneben > > Die Erklärung ist und bleibt Unsinn, egal was danach kommt und ich finde > nichts, was die richtigstellen würde. worauf bezieht Ihr Euch eigentlich? Darauf, das dort 350x30 = 7s steht? Stimmt, ist so falsch, sollte besser 350 * 20ms = 7000ms = 7s heißen. Oder geht es um das Prinzip? Das habe ich schon 1988 am C64-Userport so gemacht, 160 x 200 in 4 Graustufen, der Wandler waren 2 Komperatoren und etwas Logik. Hat 160 x 20ms = 3200ms = 3,2s gedauert. Kamera war eine TFK500, Eine Person im Vollbild konnte man verblüffend gut erkennen. Gruß aus Berlin Michael
Won K. schrieb: > Die Erklärung ist und bleibt Unsinn, egal was danach kommt und ich finde > nichts, was die richtigstellen würde. ist dir klar dass man mit einem kleinen AVR nicht ein MHz-Signal abtasten kann und dass deshalb in jeder Zeile nur ein Wert eingelesen wird? Daraus ergeben sich dann die n*20msec für ein Gesamtbild. Wo ist da der Unsinn versteckt?
Eigentlich sollte in diesem Post um den "freiBot" gehen... Die Webseite mit der Kamera ist schon seit 2006 Online. Es ist also ein eher älteres Projekt. Interessant war dort für mich die Beantwortung der Fragesstellung, ob mit einem 8Bit Controller mit relativ langsamem AD-Wandler eine Bildverarbeitung ohne großen Hardwareaufwand möglich ist. Wie man anhand des Kamerabildes der Technology Review sieht, ist zumindest die Bildaufnahme möglich. Für den Roboter habe ich die Kamera als Liniensensor benutzt. Eine Vertikallinie braucht dabei 20ms und die Rechenkraft des Controllers reicht für das Finden der Linie aus. >Oder geht es um das Prinzip? Das habe ich schon 1988 am C64-Userport so >gemacht, 160 x 200 in 4 Graustufen, der Wandler waren 2 Komperatoren und >etwas Logik. Hochinteressant, dass das schon mit dem C64 ging. Das bringt mich gerade auf die Idee, dass man statt des AD-Wandlers den Komparator des Atmegas verwenden könnte. Da verliert man zwar Dynamik, kann aber die Zeilen viel schneller sampeln.
Angehängte Dateien:
-

axis.png
4,4 KB
Vor ein paar Tagen haben ein paar Kollegen Teile mit einem 3D-Drucker erstellt. Durch sie bin ich auf "openscad" gestoßen, mit dem man Modelle für den 3D Drucker entwerfen kann. Für C-Programmierer ist das Programm toll. Es hat zwei Fenster und man tippt im linken Fenster den Code ein und beim Drücken von F6 erscheint im rechten Fenster das Modell, welches man drehen und Zoomen kann. Der Code für das Modell der Achse sieht z.B. so aus.
1 | axLength=120; |
2 | axDiameter=8; |
3 | axHole=6; |
4 | |
5 | ring(axLength,axHole,axDiameter); |
6 | |
7 | module ring(thickness,innerDiameter,outerDiameter) |
8 | {
|
9 | difference() |
10 | {
|
11 | cylinder(thickness,outerDiameter/2,outerDiameter/2); |
12 | cylinder(thickness,innerDiameter/2,innerDiameter/2); |
13 | }
|
14 | }
|
Nachdem ich ein wenig mit dem Programm gespielt habe, finde ich es ganz witzig. Jetzt fehlt mir nur noch ein 3D-Drucker.
Angehängte Dateien:
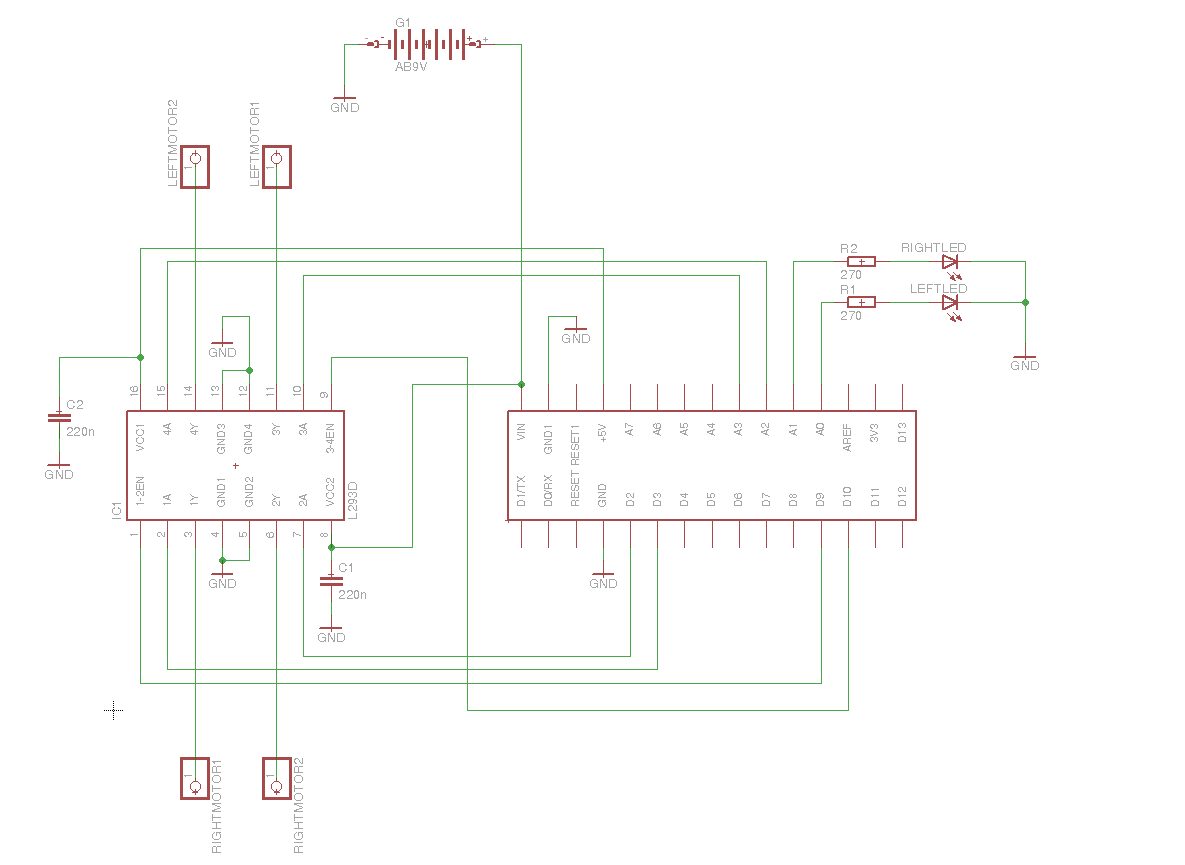
Hier der "ver-eagle-te" Basisschaltplan des Freibot. Die Anschlüsse sind so gelegt, dass man die Schaltung gut auf einen Streifenrasterplatine bauen kann.
Angehängte Dateien:
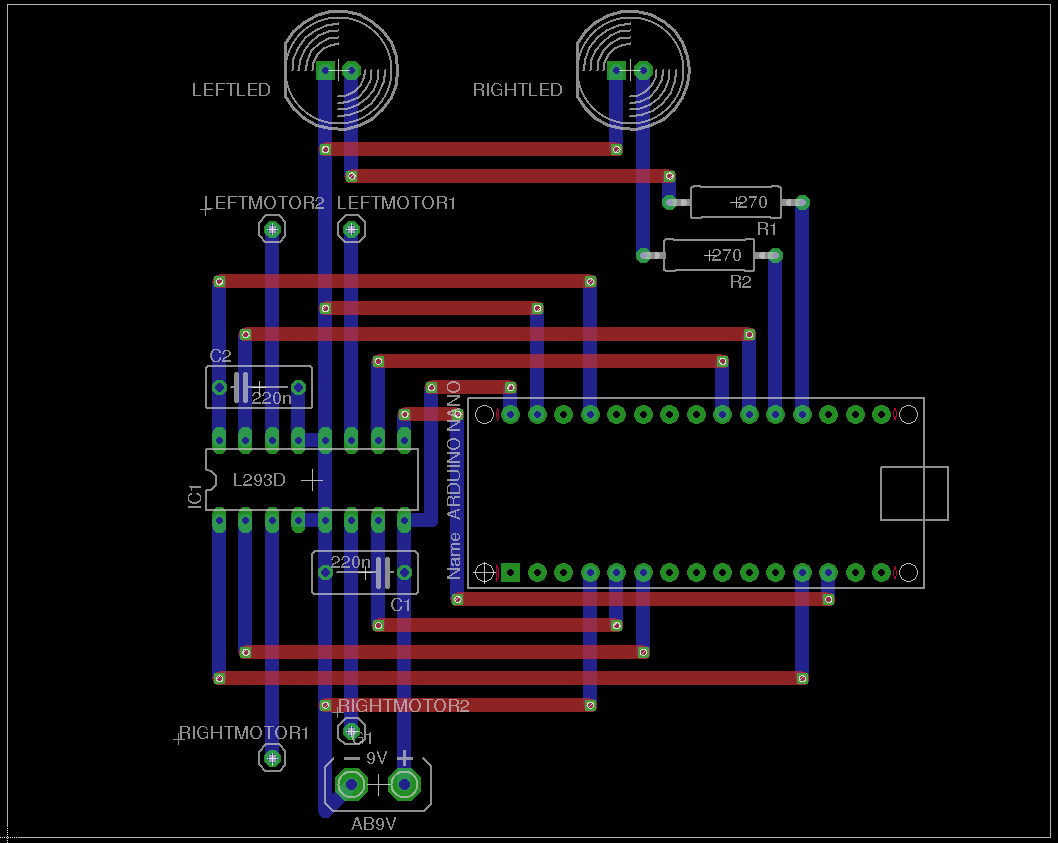
Und hier das Layout für die Streifenrasterplatine.
Angehängte Dateien:
-

3dDruckRoboAntrieb1.JPG
230 KB
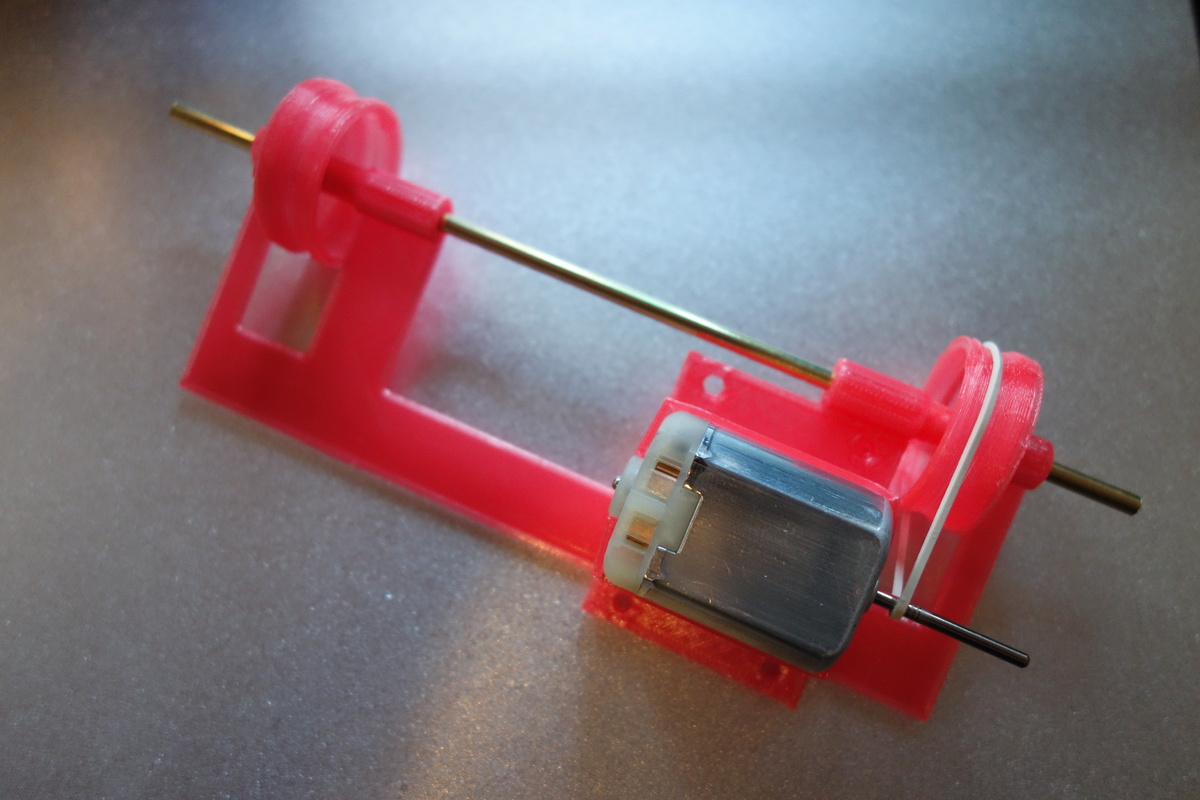
Da ich mir einen 3D-Drucker angeschafft habe, möchte ich die Robotermechanik mit dem Drucker erstellen. Im Bild der erste Anlauf für den Antrieb.
Bitte melde dich an um einen Beitrag zu schreiben. Anmeldung ist kostenlos und dauert nur eine Minute.
Bestehender Account
Schon ein Account bei Google/GoogleMail? Keine Anmeldung erforderlich!
Mit Google-Account einloggen
Mit Google-Account einloggen
Noch kein Account? Hier anmelden.