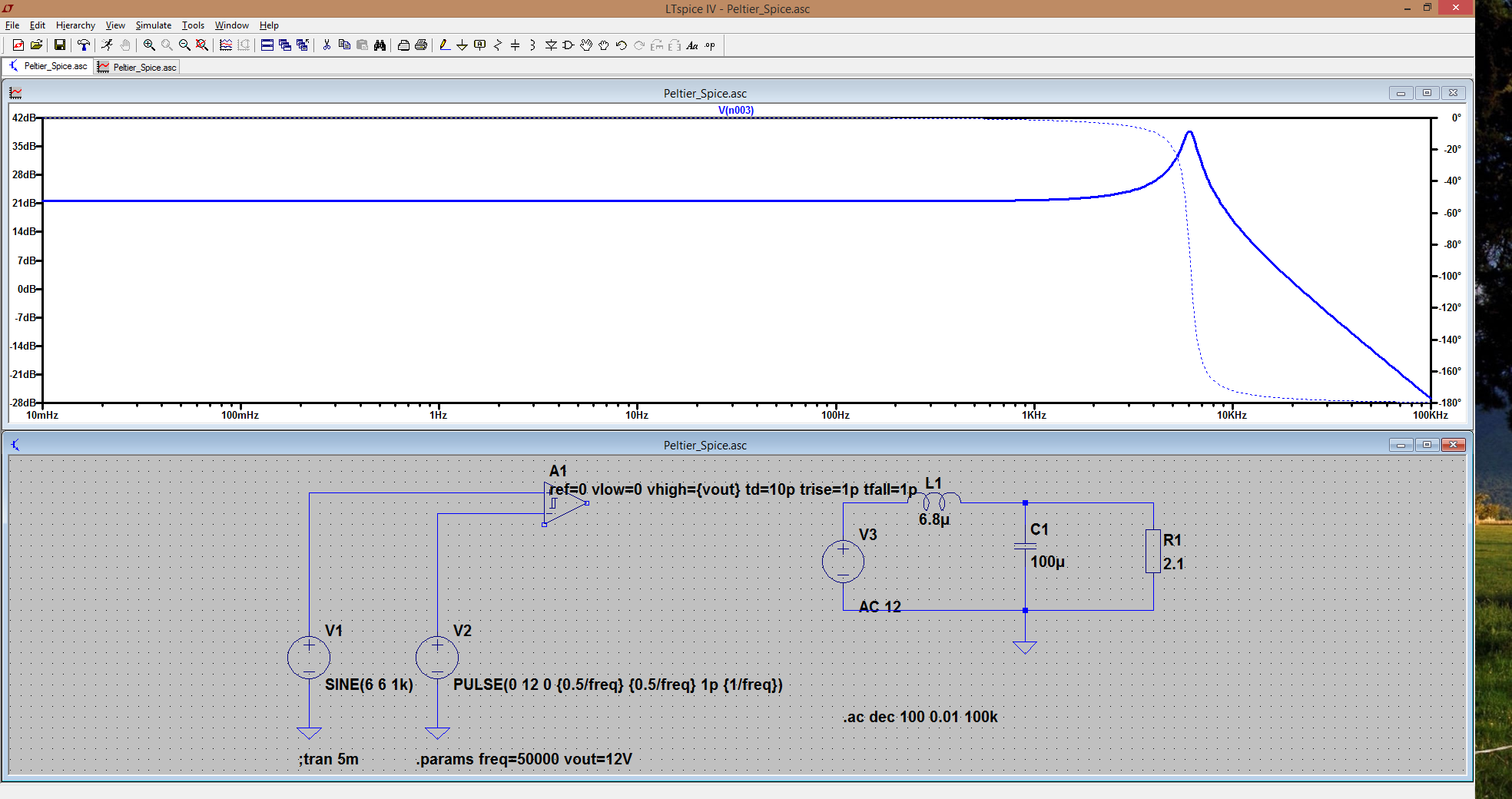
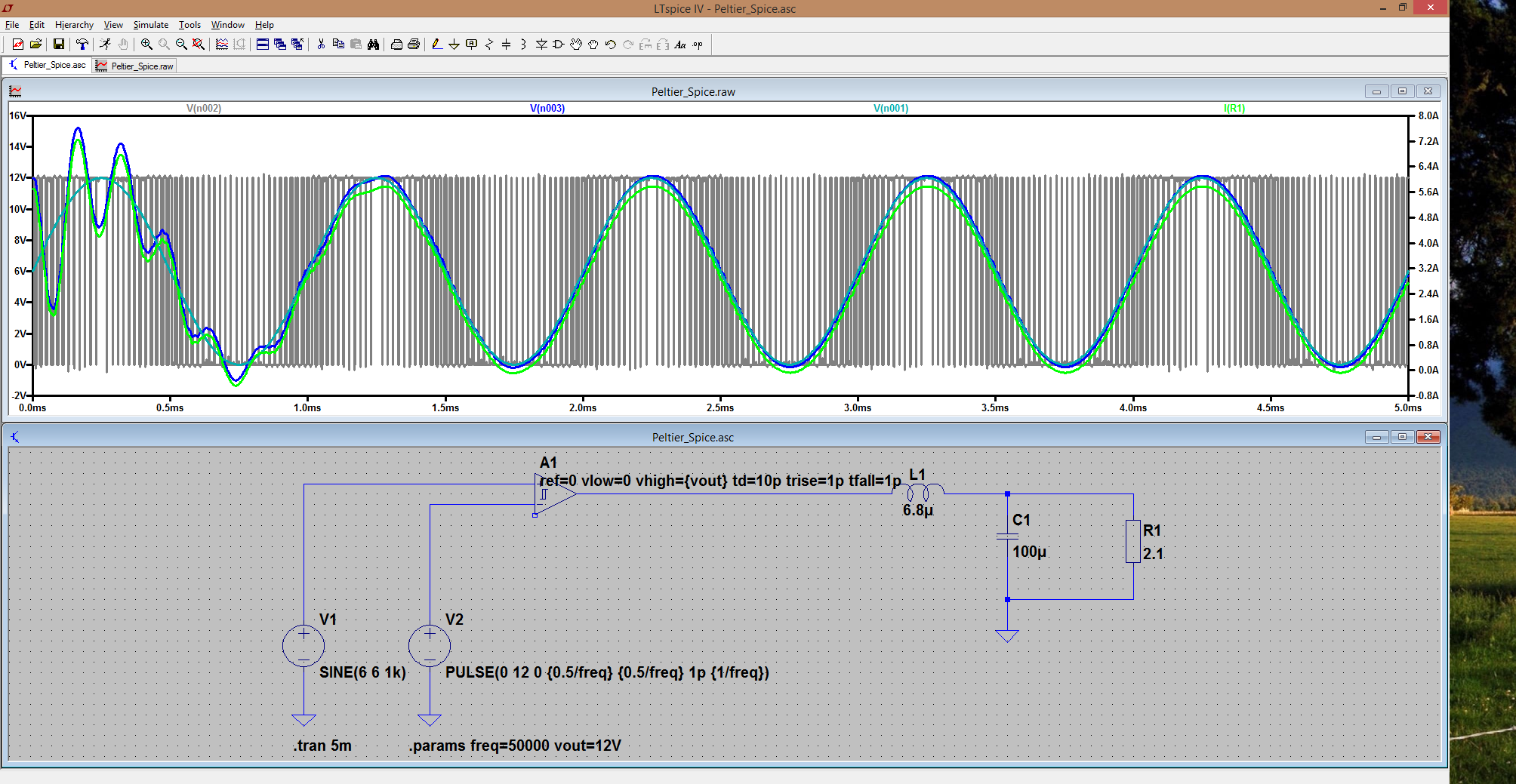
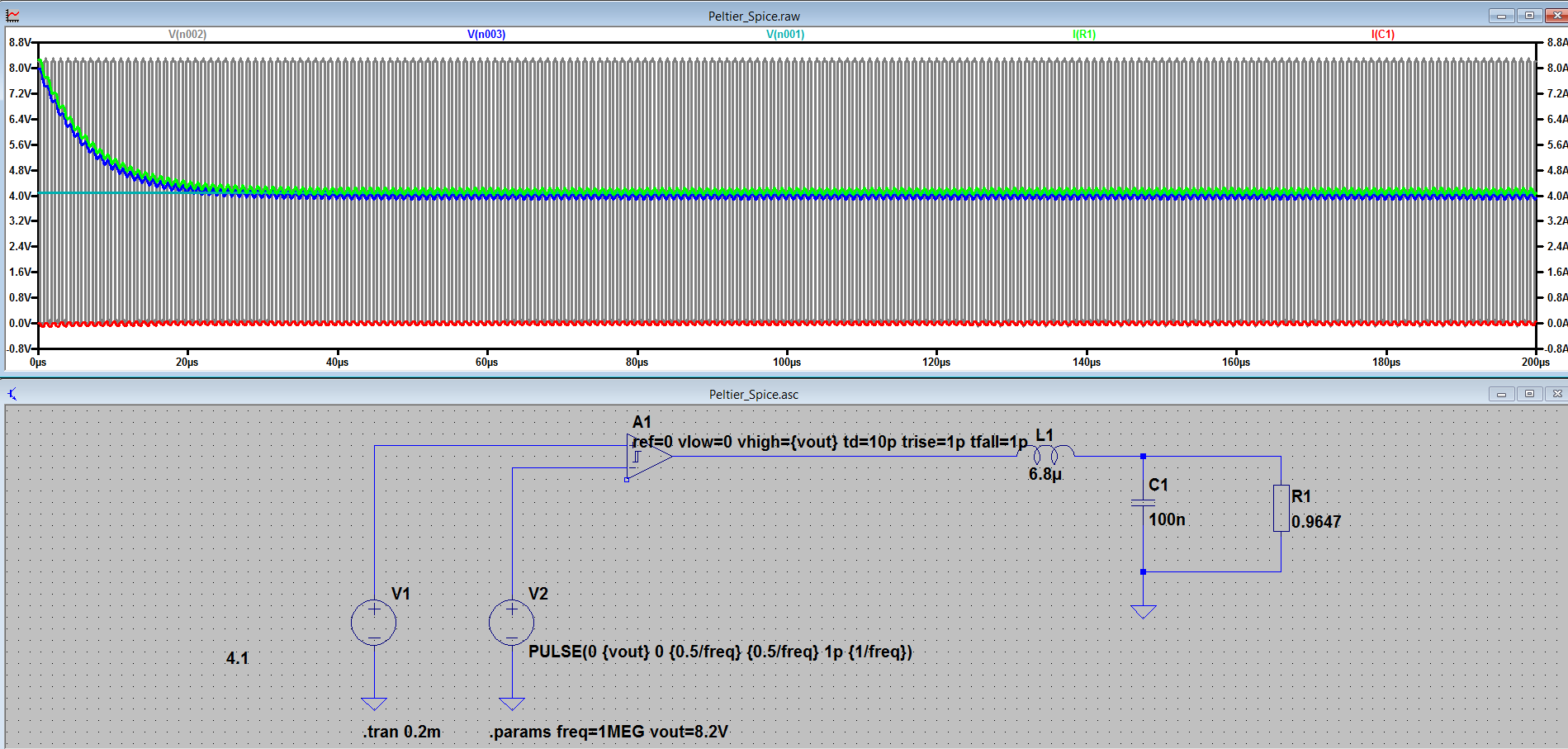
Hallo alle Zusammen, ich entwickle gerade eine Regelung für ein Peltier-Element auf Basis eines AtMega328P. Das Peltier-Element wird über eine H-Brücke an 12 Volt Gleichspannung betreiben, wobei die H-Brücke mittels PWM angesteuert wird. Da man Peltier-Elemente nicht mit pulsartigen Strömen, sondern mit Gleichsströmen betrieben sollte, möchte ich einen Tiefpass auslegen, der das PWM-Signal glättet. An sich ist das ja kein Problem, aber es wäre ganz schön, wenn ihr einmal drüber gucken könntet, ob sich eventuell ein Fehler eingeschlichen hat. Auf dem Oszilloskop sehe ich nämlich keinen Unterschied zwischen dem gefilterten und ungefilterten Signal am Peltier-Element. Und zwar habe ich bei einer PWM-Frequenz von 50 kHz eine Induktivität mit 6.8 µH und eine Kapazität von 100 µF in der bekannten Anordnung verschaltet. Das Peltier-Element habe ich als ohmsche Last mit einem Widerstand von 2.1 Ohm angenommen. Damit kommt man auf eine Grenzfrequenz von 6103,3 Hz. In LT-Spice simuliert sieht das Ganze auch schon recht gut aus (s. Bilder). Nur bin ich mir nicht so sicher, warum auf dem Oszilloskop trotzdem noch ganz klar das PWM-Signal zu erkennen ist. Theoretisch dürfte doch hinter dem Filter nichts mehr davon zu erkennen sein? Vielen Dank schonmal für etwaige Antworten! Und Frohes Neues! LB
Angehängte Dateien:
-

freqbereich.PNG
140 KB -

zeitbereich.PNG
220 KB
Ein Peltierelement ist nunmal nichtlinear. Vermutlich verhält es sich wie eine Z-Diode mit hohem Innenwiderstand. Regle also nicht die Spannung, sondern den Strom.
Angehängte Dateien:
-

sinus_1750Hz.jpg
97 KB
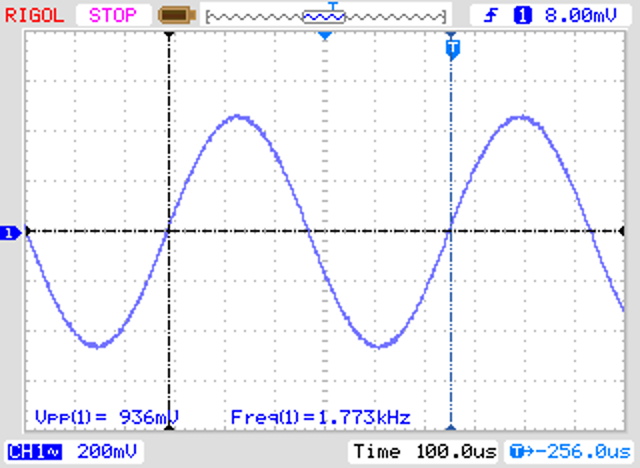
Hallo, ich habe für eine 1750Hz PWM Sinussignal ein 3 Stufiges TP-Filter mit F-3dB = 2,2kHz genommen. Dann folgt noch eine Puffer a=1 und ein Schallwandler. Das FFT zeigt dann nur noch wenige Mischprodukte. Hier noch ein Bild vom Rigol DS1102E.
Hallo Sascha und Karl, vielen Dank schonmal für eure Antworten! Die Spannung wird bei meinem System auch gar nicht geregelt, sondern Stellgröße meines Reglers ist der PWM-DutyCycle. Eingangsgröße des Reglers hingegen ist die Differenz aus Solltemperatur und tatsächlicher Temperatur des Peltier-Elements. Allerdings kann ich den Strom, den das Peltier-Element benötigt messen, da die verwendete H-Brücke einen Ausgang dafür bereitstellt. Allerdings würde das ja nichts an der Tatsache ändern, dass das Ausgangssignal des Treibers ein PWM-Signal ist. Und dieses muss nun einmal irgendwie gefiltert werden, sodass der "Ripple-Faktor" unter 10 % liegt (s. hier: http://www.quick-cool.com/peltier_elements/power-supply-peltierelements.html). Karl, meinst du einen aktiven Tiefpass, wie er hier dargestellt ist? https://de.wikipedia.org/wiki/Tiefpass#/media/File:Aktiver_Tiefpass.png Wärst du ansonsten eventuell so freundlich, kurz einen Schaltplan deines Aufbaus zu skizzieren? Das wäre echt super. Ich kann mir nämlich gerade nicht vorstellen, wie du die einzelnen Filterstufen verschaltet hast. Viele Grüße Lukas
Hallo Lukas, guck Dir doch mal den Ripple-Strom in Deinem Kondensator an und berücksichtige, daß der Kondensator (Elko?) in Deiner realen Schaltung sicher nicht der Simulation mit idealen Bauteilen entspricht! Welche Bauteile hast Du im RL verwendet? Wo liegt der Sättigungsstrom der Induktivität? Ich würde mir die ganze Tiefpass-Rumrechnerei mit Grenzfrequenz und Übertragungsfunktion sparen und mich auf das konzentrieren, worauf es ankommt: den Ripple-Strom im Peltier-Element. Danach eine größere Induktivität und/oder eine höhere PWM-Frequenz auswählen und C1 ggf. ganz weglassen bzw. evtl. gegen EMV-Probleme Keramik-C mit wenig Kapazität. 100kHz/100µH/1µF scheint mir ein brauchbarer Ansatz zu sein...
Lukas B. schrieb: > Auf dem Oszilloskop sehe ich nämlich keinen > Unterschied zwischen dem gefilterten und ungefilterten Signal am > Peltier-Element. Mit "auf dem Oszilloskop" meinst du sicherlich in deiner Simulation. Und da ist doch ein deutlicher Unterschied der Signale. Das ungefilterte Signal ist die (graue) PWM, und das gefilterte eines der Sinus-Signale. Eine gewisse Restwelligkeit wird bleiben, denn wie du aus der Filtercharakteristik siehst, dämpft dein TP die 50 KHz mit ca. -36dB (ideale Bauteile vorausgesetzt). Das ergibt ca. 1.6% Welligkeit. Wie schon geschrieben wurde, solltest du in deiner Simulation mit realen Bauteilen arbeiten. Die Rippleströme sind nicht unerheblich in deiner Anwendung, daher bietet es sich an mehrere Kondensatoren parallel zu schalten. Evtl. führen 20 Stck. 4.7uF Keramik zum Ziel. PS: ausserdem sind rise und fall Zeiten im ps Bereich recht unrealistisch. Nimm hier mal eher etwas im ns-Bereich an, und dann haut dir Spice auch weniger Zacken in die Simulation.
Joe F. schrieb: > Mit "auf dem Oszilloskop" meinst du sicherlich in deiner Simulation. Das glaube ich eher nicht.
Hallo Thomas, Joe und Klaus, danke für eure hilfreichen Beiträge! @Thomas: Der Ripple-Strom im Kondensator beträgt laut LTSpice 8,92 A. Allerdings hat der Kondensator in der Simulation auch keinen ohmschen Widerstand (den könnte man aber notfalls einstellen). Für die Spule habe ich eine Induktivität mit 6,8 µH verwendet und einen Serienwiderstand von 3,8 mOhm, was den Werten der Spule entspricht, die ich dort einbauen wollte und die auch einen ausreichend großen Maximalstrom zulässt. In meinem Versuchsaufbau habe ich allerdings eine Spule aus der Bastelkiste genommen. Ob die überhaupt für diese Ströme ausgelegt ist, weiß ich nicht. Aber daher muss das Ganze ja auch nochmal theoretisch durchdacht werden. 100 kHz PWM-Frequenz wären durchaus noch machbar und die Ergebnisse mit der Konfiguration 100 kHz 100 µH 1 µF sehen in LT-Spice auch ganz gut aus, allerdings kann ich keine Spule mit 100 µH einbauen, die 8,5 A (Maximalstrom des Peltier-Elements) aushält, da die ganze Schaltung (inkl. Mikrocontroller und H-Brücke) auf kleinstem Bauraum untergebracht werden soll. Der Ripple-Strom im Peltier-Element liegt übrigens bei 105 mA (@50kHz / 6,8 µH / 100 µF). Das entspräche dann 1,2 Prozent des Maximalstroms und einem Ripple-Faktor (wie auf der Herstellerseite beschrieben) von 1,85 %, was die max. Temperaturdifferenz am TEC nur um Faktor 0,99965 verschlechtern würde, was aber vernachlässigbar ist. Laut Hersteller wären ja auch noch 10 % Ripple-Faktor, also 850 mA Ripple-Strom im Peltier-Element zulässig und würden die maximale Temperaturdifferenz nur um 1 % gegenüber dem Optimum verringern. Dass der Ripple-Strom in C1 allerdings so hoch ist, hätte ich nicht gedacht. Bei der Konfiguration 100 kHz 100 µH 1 µF, die zwar aus oben genannten Gründen nicht möglich ist, liegt der Ripple-Strom immerhin bei 4,9 A. Ich sehe auch gerade, dass die Kondensatoren, die ich herausgesucht habe, mit maximal 750 mA Ripple-Strom beziffert sind. D.h. ich müsste mindestens 12 Stück parallel schalten, was aber wieder im Widerspruch zum Platzbedarf stünde. Hättet ihr denn eine alternative Idee, wie ich die Glättung des PWM-Signals hier vornehmen könnte? @Joe: Die Messung am realen Aufbau habe ich mit einem PicoScope 2205A durchgeführt. Entschuldige, wenn das oben nicht deutlich herübergekommen ist.
Habt ihr eine Idee, in welcher Größenordnung die maximal zulässigen Ripple-Ströme von Keramik-Kondensatoren im Vergleich zu Elkos liegen? Ich habe beispielsweise diese hier gefunden, allerdings gibt das Datenblatt keine entsprechende Auskunft: https://www.conrad.de/de/keramik-kondensator-47-f-16-v-20-l-x-b-x-h-32-x-25-x-25-mm-wuerth-elektronik-wcap-csgp-885012109011-1-st-1280049.html?ref=searchDetail Wobei die Baugröße auch das Parallelschalten mehrerer Kondensatoren erlauben würde. Mit der Kombination 100 kHz-PWM-Frequenz, 6,8 µH und 47 µF liegt der Ripple-Strom in der Simulation auch nur bei 4,6 A und der im Peltier-Element sogar unter 100 mA. Wenn ich also z.B. 8 Stück parallel schalten würde, müsste jeder Kondensator nur noch 575 mA "ertragen".
Hallo Lukas, der Ripple-Strom ist bei Keramik-Kondensatoren i.d.R. kein großes Thema, weil sie gegenüber Elkos einen um Größenordnungen geringeren ESR haben. Dafür haben sie wieder das Problem, daß ihre Kapazität mit zunehmender Spannung drastisch abnimmt - je kleiner die Bauform, desto dramatischer ist der Effekt! Aufschlussreich ist da z.B. ein Besuch der Murata Webseite, -> Simsurfing (online, muss man nicht installieren) und sich dann einen vergleichbaren Kondensator 'raussuchen (z.B.GRM32ER61C476KE15) Bei 12V DC BIAS bleiben von den 47µ weniger als 15µF übrig. Bei Klick auf "Data Sheet" gibt es aber immerhin auch einen Grafen zum Ripple-Current: der liegt so bei 5A, wenn man 20 Grad Temperaturerhöhung akzeptiert. Wenn man ein paar davon parallel schaltet, um auch bei 12V auf min.50µF zu kommen, ist das Thema Ripplestrom im Kondensator jedenfalls erledigt! Die Induktivität muss übrigens auch den Ripplestrom im LC-Schwingkreis verkraften, d.h. ihr Sättigungsstrom muss mindestens auf den maximalen Strom des Peltier-Elements plus 1/2 Ripplestrom ausgelegt werden! Zuviel Ripplestrom in der Induktivität ist evtl. auch nicht gut, das gibt dann u.U. mehr Verluste und es wird heiss. Wenn's klein sein soll, würde ich vielleicht zur deutlichen Erhöhung der PWM-Frequenz tendieren. 1MHz wäre gut, da muss aber auch der Rest der Schaltung passen (FETs, Treiber, Layout).
Lukas B. schrieb: > Bei der Konfiguration 100 kHz 100 µH 1 µF, die zwar aus > oben genannten Gründen nicht möglich ist, liegt der Ripple-Strom > immerhin bei 4,9 A. Da muss aber was bei Deiner Simulation schiefgelaufen sein - 4,9A Ripple können da nirgends auftreten!?
Angehängte Dateien:
-

simulation2.PNG
70 KB
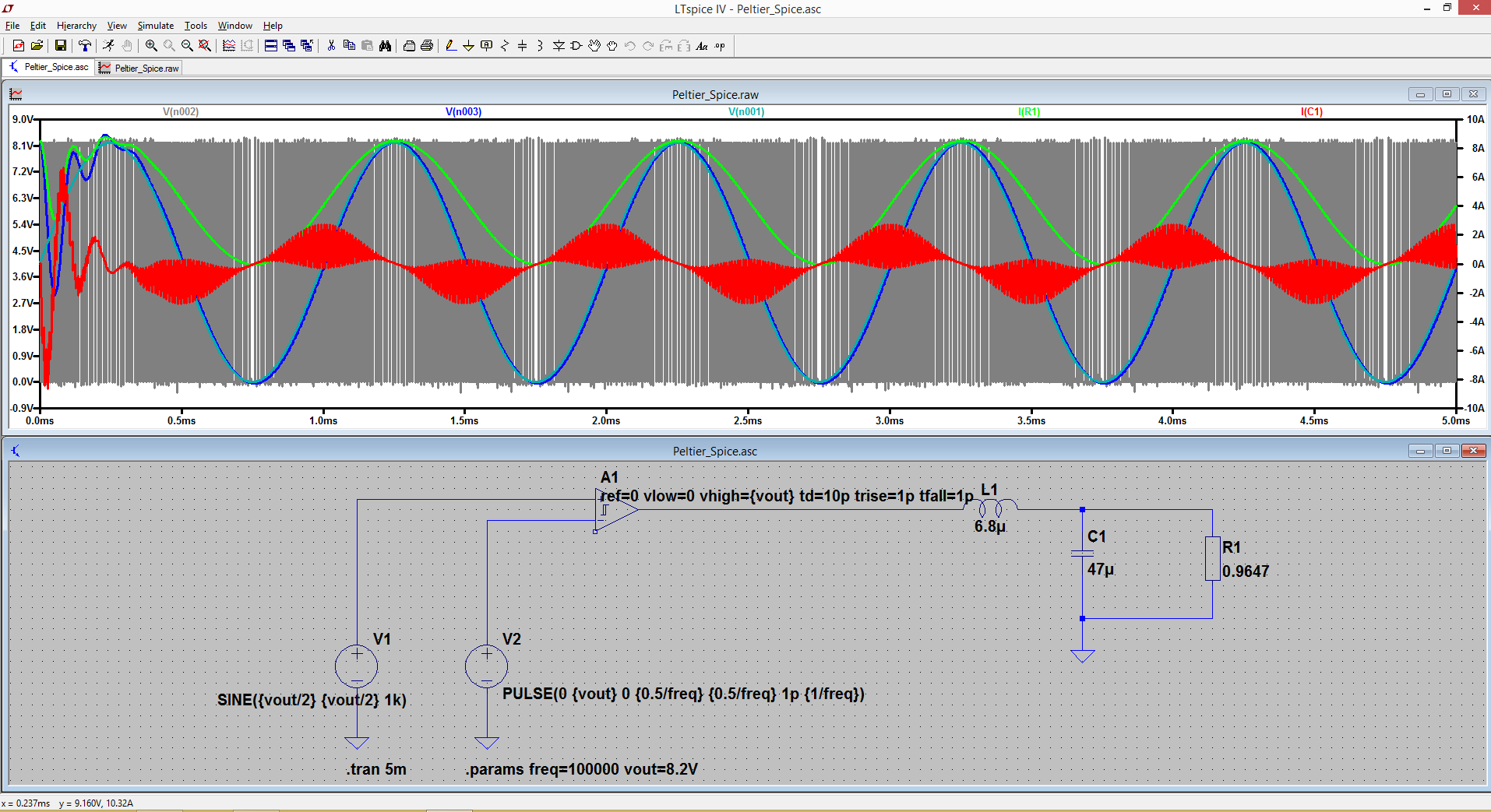
Hallo Thomas, danke erstmal, dass du dich so dahinterklemmst, mir zu helfen! Dass die Kapazität von Keramik-Kondensatoren bei einer überlagerten Gleichspannung so stark abnimmt, war mir neu. Allerdings ist es wie du schon sagst, kein Problem, mehrere (~ 4 Stk.) parallel zu schalten, da die Baugröße im Vergleich zu einem Elko ja sehr kompakt ist. Das Board soll später ca. 4 cm x 4 cm groß werden und muss µC, H-Brücke, Filter und einige Schraubklemmen aufnehmen, d.h. das wird schon passen. In Hinblick auf die Simulation muss ich meine obigen Angaben korrigieren, da ich fälschlicherweise noch mit dem alten Wert für die Nennspannung (12 V) simuliert habe. Mit dem nun richtigen Wert von 8,2 V liegt der Ripplestrom im Kondensator bei ca. 3 A mit der Bauteilkombination 47 µF / 6.8 µH (mit 3,8 mOhm Serienwiderstand) bei 100 kHz PWM-Frequenz. Allerdings habe ich gerade festgestellt, dass der Ripplestrom vom Duty-Cycle des PWM-Signals abhängt und offensichtlich bei 50 % Duty-Cycle sein Maximum von knapp über 3 A annimmt. Als Ripplestrom messe ich im Übrigen die Amplitude des im Kondensator fließenden Wechselstroms (nicht, dass wir hier nachher über verschiedene Dinge reden). Bei deiner Konfiguration (100 kHz 100 µH 1 µF) ist der Ripple-Strom nun auch deutlich geringer. Ich habe die Spice-Datei sonst auch mal an meinen Beitrag angehängt, falls du mal einen Blick drauf werfen möchtest. Und 100 kHz PWM-Frequenz ist schon das Maximum, das mit meiner Schaltung möglich ist, da die FETs laut Hersteller des Treibers (https://www.pololu.com/product/2991) erst nach 0.5 µs durchschalten, sodass auf niedrige PWM-Duty-Cycles nicht mehr entsprechend reagiert werden kann. Und in der Spezifikation ist als Obergrenze für die PWM-Frequenz auch der Wert 100 kHz angegeben. Aber nochmal zum allgemeinen Verständnis: Der Rippelstrom ist der Blindanteil des Stromes im Kondensators, der, infolge der durch die äußere Anregung (gepulste Spannung am Filtereingang) erzwungenen Schwingung des LC-Gliedes, zwischen Spule und Kondensator ausgetauscht wird. Sprich der Filter wird einerseits von Wirkleistung durchflossen, die im Peltier-Element umgesetzt wird, und anderseits werden auch Blindleistungen umgesetzt, die bedingt durch den ohmschen Widerstand der realen Bauteile wiederum zu Verlusten führen. Richtig? Beste Grüße Lukas
Boah - diese H-Brücke is ja riesig (und teuer obendrein)! Ich war erstmal davon ausgegangen, daß Du vielleicht sowas nimmst: http://www.ti.com/lit/ds/symlink/csd97376q4m.pdf, oder etwas "diskreter", ein Treiber-IC (sowas in der Art: http://www.onsemi.com/pub_link/Collateral/NCP3420-D.PDF) und zwei MOSFETs. Da wäre dann auf einer 4x4cm Platine bestimmt auch noch Platz für eine größere Induktivität (z.B. sowas: http://katalog.we-online.de/pbs/datasheet/74435586800.pdf). Diese Bauteile sind nur Beispiele, habe nicht gründlich geprüft, ob sie tatsächlich für die Anwendung optimal geeignet wären. Brauchst Du eigentlich wirklich eine H-Brücke, d.h. willst Du den Strom im Peltier-Element auch umpolen? Bei dem Ripplestrom bin ich mir jetzt nicht sicher, was man da als "offizielle" Definition benutzt. Beim Kondensator würde ich den Effektivwert des Wechselstroms (Gleichanteil hat er ja keinen) durch den Kondensator annehmen. Bei Induktivitäten würde ich als Ripplestrom die Differenz zwischen Maximal- und Minimalstrom nehmen. Gruß, Thomas
Lukas B. schrieb: > Und Frohes Neues! Selbiges. > Damit kommt man auf eine Grenzfrequenz von 6103,3 Hz. Dieser Satz sagt einiges über dein Dilemma. Du jonglierst da mit Zahlen und rechnest dir Wunschwerte aus, dabei ist deine Spule viel zu klein für die angestrebte Frequenz. Das sieht man eigentlich shcon ohne Rechnung.. Oder andersrum: was du da baust ein ein simpler Buck-Wandler. Bei 100kHz haben die Dinger dann gern eine Induktivität um 150uH (http://320volt.com/en/lt1076-step-down-12v-to-5v-2a-switching-dc-dc-converter/) Und das Ziel dieser Step-Down ist nicht ein konstanter Strom, sondern eine konstante Spannung. Ergo muss deine Induktivität, die ja den Strom konstant halten muss (nur die kann das!) viel, viel größer sein. Thomas E. schrieb: > Brauchst Du eigentlich wirklich eine H-Brücke, d.h. willst Du den Strom > im Peltier-Element auch umpolen? Falls nicht, wäre sowas denkbar:
1 | 12V |
2 | o |
3 | | |
4 | | |
5 | o-------. |
6 | | | |
7 | 3| | |
8 | 1mH 3| | |
9 | 3| - Freilaufdiode |
10 | | ^ |
11 | | | |
12 | Peltier | |
13 | | | |
14 | o-------' |
15 | | |
16 | |-' |
17 | |< |
18 | ---|-. |
19 | | |
20 | | |
21 | --- |
Servus, Lothar M. schrieb: > Falls nicht, wäre sowas denkbar: kommt auf den Schwerpunkt an. Wenn der aus Effiziens liegt, ist der Ansatz mit einer synchronen Brückenschaltung schon besser, als eine Freilaufdiode. Ein paar Ampere mal ein paar hundert mV Vf ergeben auch schon eine mollig warme Schottky-Diode... ;)
Hallo Thomas und Lothar, ich glaube, ich muss mal etwas weiter ausholen, damit klar wird, wofür das ganze überhaupt sein soll. Ich möchte im Rahmen meiner Bachelorarbeit wie eingangs erwähnt einen Temperaturregelkreis für ein thermoelektrisches Element aufbauen. Im Mittelpunkt meiner Arbeit steht dabei allerdings der regelungstechnische Aspekt, sprich experimentelle Modellierung der Regelstrecke, Validierung und Analyse des Streckenmodells, Entwerfen und Implementieren einer Reglerstruktur sowie Einstellung des Reglers auf Basis des Modells der Strecke und anschließend eine Analyse des geregelten Systems (Stabilität, Regelgüte, usw.). Zudem soll der Regler in eine übergeordnete Steuerungssoftware eingegliedert werden, die die Betriebsabläufe des System entsprechend externer Eingaben (serielle Schnittstelle, anderer µC) steuert. Hierbei soll es auch möglich sein, mit dem System zu heizen, d.h. eine Umkehrung der Polung des TECs ist unbedingt erforderlich. Zudem überlege ich, ob ich nicht untersuche, was passiert, wenn man die Umpolung zur Beschleunigung des Regelvorganges einsetzt. Sprich, wenn das Peltier-Element unter Solltemperatur abkühlt, wird der Regler nicht nur den Strom durch das Peltier-Element auf Null stellen, sondern einen umgekehrt gepolten Strom fließen lassen. Da ich auch eigentlich gar kein Elektrotechniker bin, ging es mir erstmal darum, den elektrischen Teil des Systems so einfach wie möglich zu halten und schnell aufzubauen, um schonmal erste Erfahrungen mit der Regelung des Systems zu sammeln. Daher habe ich zunächst einmal auf fertige Module (H-Brücke, Arduino, usw.) zurückgegriffen. Nächster Schritt wäre nun die Umsetzung des zurzeit modularen Aufbaus in eine kompakte Schaltung auf nur einem Board, da ich die Streckenanalyse natürlich mit der finalen Schaltung durchführen muss, um ein ausreichend genaues Modell zu erhalten. Das soll aber natürlich auch alles so einfach wie möglich gestaltet bzw. bereits fertig entwickelt sein, da ich in der Arbeit gar nicht den Platz habe, im Detail auf die Entwicklung einer komplexen Schaltung einzugehen. Soviel zum Hintergrund... Was die integrierten Treiber-ICs anbelangt, so könnte ich mich aber durchaus mit einer solchen Lösung anfreunden, sofern man den Chip ohne große Zusatzbeschaltung an den µC anschließen kann. Das scheint mir beim CSD97376Q4M ja der Fall zu sein, wenn ich das Application Diagram richtig interpretiere. Ganz schlau werde ich aus der Darstellung allerdings auch nicht. Ist mit "Multi-Phase Controller" dort einfach ein beliebiger µC gemeint? Und was hat es mit den eingefügten Grafiken der Chips auf sich? Allerdings wäre es natürlich noch schöner, wenn ich einen Chip fände, der von den Anforderungen an die externe Beschaltung z.B. dem VNH3SP30 (http://www.st.com/st-web-ui/static/active/en/resource/technical/document/datasheet/CD00134336.pdf) gleichkäme, dabei aber natürlich entsprechend höhere PWM-Frequenzen erlaubt. Ich habe nun aber noch einmal die Simulation mit der 68 µH-Induktivität und angpassten Serienwiderstand sowie 1 µF durchgeführt und das Ergebnis sieht tatsächlich viel besser aus. Der Rippelstrom im Kondensator liegt jetz unter 250 mA. Ich denke, damit könnte man schon arbeiten. Nichtsdestotrotz reizt mich die Idee, den Treiber mit einem solchen IC aufzubauen. Vor allem, da ich keinen Schaltplan des Pololu-Boards habe und somit erst aufwendiges "Reverse-Engineering" betreiben müsste. Kennt ihr denn zufällig fertige Schaltungen, die die entsprechenden Anforderungen erfüllen? - Spannung am Ausgang <= 8,2 V - Strom am Ausgang <= 8,5 A - PWM-Frequenz: 1..2 MHz (damit eure obigen Vorschläge umsetzbar sind) - Möglichkeit zur Umpolung des Ausgangs - Möglichkeit zur Strommessung am Ausgang (optional) @Lothar: Vielen Dank für die Erklärung zur Spule! Die Transistorschaltung ist natürlich aufgrund der Erfordernis einer Umpolung nicht einsetzbar. Aber trotzdem Danke! @Thomas: Meine Angaben zu den Rippelströmen bezogen sich jetzt immer auf den Scheitelwert des Wechselstroms, d.h. wenn die Angaben in den Datenblättern tatsächlich auf den Effektivwert bezogen sind, hätte ich ja noch eine Sicherheitsreserve von 41,4 %. Aber gut, wenn ich die 68µH-Induktivität nehme, spielen die Rippelströme laut Simulation ja ohnehin keine große Rolle mehr.
Lukas B. schrieb: > Ist mit "Multi-Phase Controller" dort einfach ein > beliebiger µC gemeint? So isses - dem Brückentreiber-IC ist es ja auch egal, woher die PWM kommt. Lukas B. schrieb: > Kennt ihr denn zufällig fertige Schaltungen, die die entsprechenden > Anforderungen erfüllen? So direkt nicht - habe die o.a. Bauteile durch parametrische Suche auf der Webseite von Digikey gefunden. Ich denke, mit der Suche nach einer Halbbrücke, die Du dann 2x einsetzt um daraus selbst eine volle H-Brücke zu machen, wirst Du eher was passendes finden, als mit einer H-Brücke in einem IC. Letztere sind wohl eher für Motoransteuerung designed, denn als Buck-Converter, für Deine Anwendung ist aber ein Buck-Converter passender. Neben den elektronischen Eigenschaften ist für Deine Arbeit die praktische Umsetzbarkeit zu beachten, d.h. welche Möglichkeiten des Platinen-Designs und der Herstellung/Bestückung hast Du? Da kann dann ggf. auch die Gehäuseform sehr wichtig sein (DIP oder SO-x Gehäuse lassen sich problemlos handlöten, die winzigen ICs mit den Lötflächen auf der Unterseite praktisch sinnvoll nur per Reflow-Ofen). Grüße, Thomas
Angehängte Dateien:
-

1Mhz_6_8H_100nF.PNG
42 KB
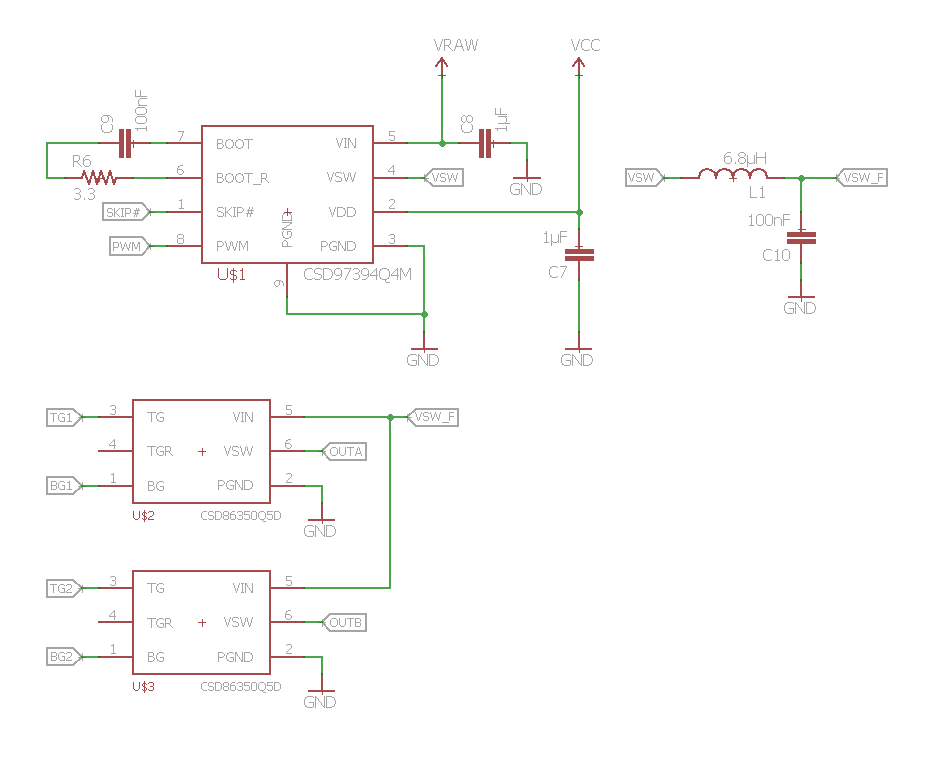
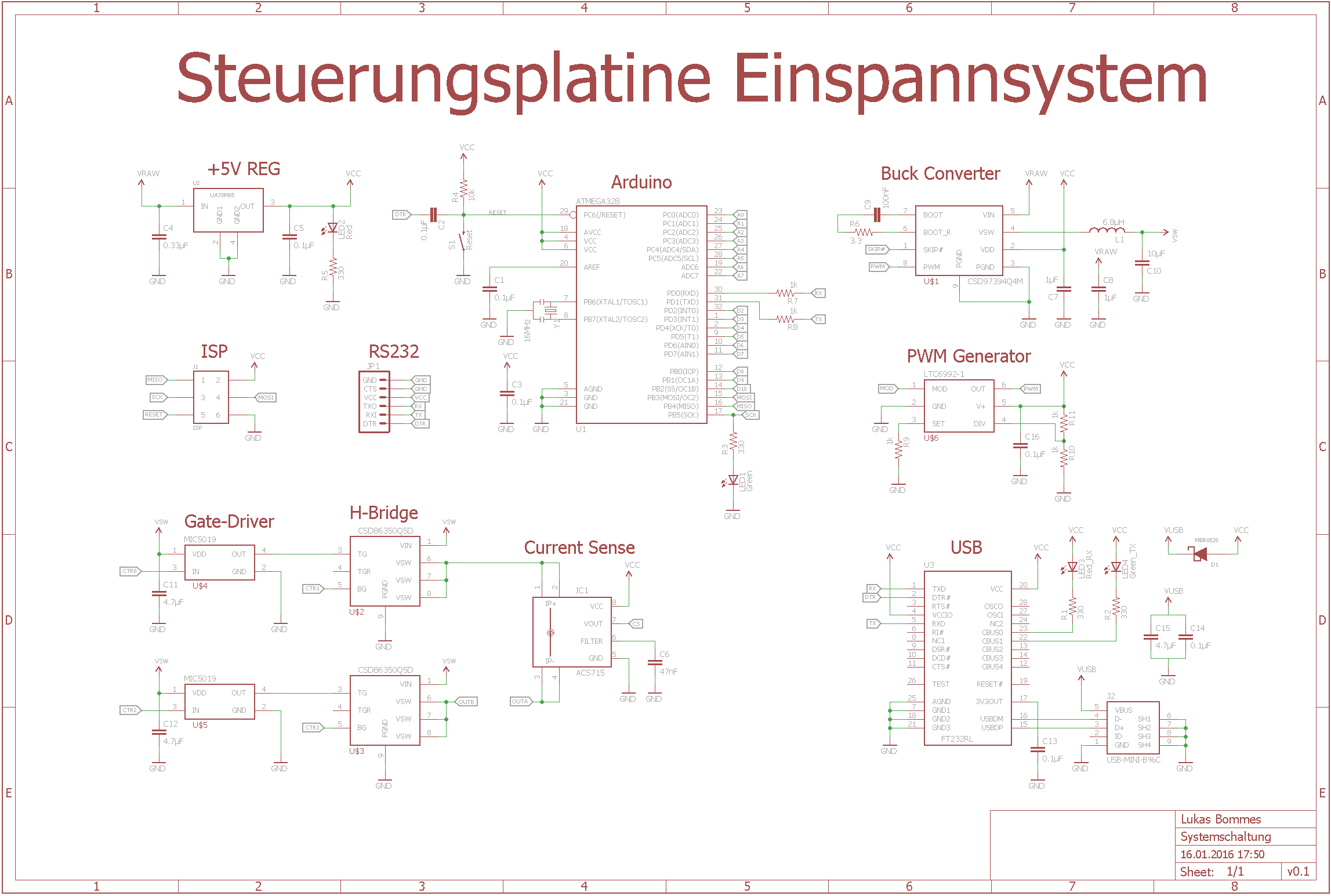
Hallo Thomas, du hast meinen Ehrgeiz geweckt, dass Ganze jetzt ordentlich aufzubauen! Die Idee mit dem H-Brücken-Modul mit 100 kHz-PWM und der großen Induktivität ist halber Kram. Ich habe jetzt mal anhand der "Typical Application" aus dem Datenblatt eine H-Brücke aus den beiden Halbbrücken (CSD97394, das ist einfach die aktuelle Version des Treibers, den du oben verlinkt hast) verschaltet (s.Schaltplan). Allerdings stellen sich mir nun einige Fragen bzw. Unklarheiten: 1) Induktivität L2 kann vermutlich entfallen, korrekt? 2) Die Werte der Induktivität L1 sowie der Kapazität C1 kann ich jetzt einfach durch Simulation mit LT-Spice bei 1 MHz-PWM-Frequenz ermitteln? Oder findet eine Rückwirkung auf den Treiber statt, die ich beachten muss? 3) Warum sind in der "Typical Application" im Datenblatt zwei Module verschaltet? Geht es hier nur darum, den Ausgangsstrom zu verdoppeln oder welchen Sinn hat das Ganze? Vor allem, dass hier zwei verschiedenen PWM-Signal eingespeist werden, wundert mich. Eine fehlerhafte Auswahl der PWM-Zustände (z.B. PWM1 = LOW und PWM2 = HIGH) kann auf diese Weise doch zu einem Kurzschluss führen, oder sehe ich das falsch? 4) Würdet ihr die Invertierung des PWM-Signals in meiner Schaltung direkt im µC realisieren, also an PinX das PWM-Signal und an PinY das negierte Signal ausgeben? Oder ist es sinnvoller, das Signal außerhalb des µC aufzutrennen und in einen Signalpfad einen Inverter zu schalten? 5) Betrifft den Skip#-Pin. Soll dieser auf HIGH oder LOW gesetzt werden, um einen normalen Betrieb zu ermöglichen? Ich werde an dieser Stelle aus den diversen Betriebsmodi des Treibers nicht ganz schlau. Irgendwelche speziellen Sleep-Modi sind für meine Anwendung nämlich nicht vonnöten, da das System, sobald es mit Strom versorgt wird, sofort das PWM-Signal verarbeiten und den Ausgang entsprechend setzen soll. So, das wäre es fürs erste mit Fragen bezüglich der Schaltung. Wenn ich keinen ganz groben Denkfehler gemacht habe, hält sich der Aufwand ja doch in Grenzen. Fühl dich auf keinen Fall unter Druck gesetzt, alles zu beantworten, notfalls muss ich mich damit selbst nochmal etwas mehr damit auseinandersetzen, wenn ich demnächst die Zeit dazu habe (aktuell stehen noch Prüfungen an). Hilfreich wäre es natürlich schon, gerade in Hinblick auf die Fragen (2) und (5). Die praktische Umsetzung stellt im Übrigen kein Problem dar, da im Institut ein Reflow-Ofen zur Verfügung steht und das PCB bei Bedarf extern gefertigt werden könnte. Vorher sollte die Schaltung natürlich erstmal ordentlich durchdacht werden. :D Einen schönen Abend noch! Grüße Lukas Edit: Habe nochmal die Simulationsergebnisse mit 1 MHz angehängt. Meint ihr, die Bauteilwerte sind jetzt passend? Die Rippeltröme sind nun auf jeden Fall sehr gering. Ob die Induktivität allerdings groß genug ist, weiß ich nicht, da ich das Problem der zu kleinen Induktivität oben aus theoretischer Sicht nicht ganz durchdrungen habe.
Lukas B. schrieb: > 1) Induktivität L2 kann vermutlich entfallen, korrekt? Im Prinzip, ja, aber: bei einem Schaltregler, besonders einem mit hoher PWM-Frequenz, muss man eigentlich die AC-Stromkreise kurz halten. Umschaltvorgänge und deren Stromkreis sollten also so kurz und direkt wie möglich um die Schaltelemente herum sein, und alles, was an Leitungen davon weg führt (z.B. zur Last), sollte nur noch Gleichspannung sein. Wenn Du die eine Induktivität weglässt, hast Du auf der Seite das ungefilterte PWM-Signal direkt am Peltier-Element. Mit Induktivität kann man den AC-Weg über einen Kondensator gleich hinter der Spule direkt gegen Versorgungsspannung kurzschließen und so den kurzen Stromweg erreichen, ohne L2 geht das nicht. Eine Alternative wäre, es nicht so symmetrisch aufzubauen (auch wenn solche Symmetrien natürlich schon rein optisch ihren Reiz haben...;) ) und stattdessen für beide Stromrichtungen die gleiche Halbbrücke mit dem PWM-Signal zu steuern, und die andere nur zur Umpolung zu nutzen (Ausgang dort permanent auf 0V oder 12V, je nach Stromrichtung). Damit müsste die ganze "Buck-Konverter"-Technik (incl. Induktivität) nur 1x vorhanden sein. Damit man in beiden Richtungen auch eine sehr kleine Ausgangsspannung für die Last erzeugen kann, braucht man dafür allerdings eine Powerstage, die auch den Highside-FET dauerhaft einschalten kann. Mit dem CSD97394 geht das, zumindest in der standard-Beschaltung, leider nicht, da dieser die PWM-Low-Phasen zum Aufladen des Bootstrap Kondensators benötigt. Es müsste also eine Powerstage her, die einen 100% Dutycycle erlaubt. Praktisch heisst das, der High-Side Schalter müsste ein P-Kanal MOSFET sein, damit er keine Gate-Spannung über der Versorgungsspannung benötigt. Vielleicht geht es aber auch mit dem CSD97394, indem man die Standard-Bootstrap Schaltung einfach durch eine externe 17V Hilfsspannung ersetzt. Auf der DC-Seite, nur für's Umpolen, wäre der CSD97394 natürlich mit Kanonen auf Spatzen geschossen und sogar eher schlecht geeignet, da könnte stattdessen besser eine simple Halbbrücke diskret aus je einem P- und einem N-Kanal MOSFET aufgebaut werden. Da diese keine hohen Frequenzen schalten müssten, könnte man dort auf niedrigen Rds_on optimierte Typen auswählen. Gruß, Thomas
Hallo Thomas, besten Dank für den hilfreichen Input! Die Idee mit dem asymmetrischen Aufbau ist klasse. Allerdings gibt es einen kleinen Haken daran. Wenn ich den Aufbau asymmetrisch gestalte und die Unterschiede zwischen den beiden Richtungen zu groß sind, muss ich die Regelstrecke zweimal analysieren und zwei verschiedene Modelle erstellen sowie die Reglerparameter beim Umschalten anpassen, da der Treiber ja noch Teil der Strecke ist. Und das wäre natürlich in Hinblick auf den Aufwand inakzeptabel. Was hälst du allerdings von der Idee, den CSD97394 in seiner Standardbeschaltung zu betreiben, das Ausgangssignal über das entsprechende LC-Glied zu glätten und dieses dann einer Vollbrücke zuzuführen, die den Umpolvorgang vornimmt? Im einfachsten Fall könnte dies ja ein simples Relais mit zwei Wechslern sein, da keinerlei Anforderungen an die Dynamik des Umschaltvorgangs gestellt werden (ca. 2 Umpolungen pro Minute). Natürlich ist ein Relais etwas zu groß, aber hierfür könnte man ja auch MOSFETs nutzen, wobei dann wieder auf die Symmetrie zu achten wäre. Das Problem mit dem nicht durchschaltenden High-Set FET bei 100 % PWM-Duty Cycle im CSD97394 würde in der Konfiguration vermutlich nicht auftreten, oder?
Hi Lukas, an eine Vollbrücke nur zur Umschaltung der Stromrichtung hatte ich noch gar nicht gedacht, aber wenn ich es betrachte, scheint es mir eine gute Lösung zu sein! Ein Vorteil wäre auch, daß man dann mit geringem Aufwand eine Strommessung in der Masse-Leitung machen kann. Der Aufwand für eine "langsame" Vollbrücke ist bei den ggb. Strömen und Spannungen auch gering - Relais-geklackere würde ich mir da keinesfalls antun! So ein Relais ist mit Sicherheit viel teurer, als vier MosFETs - und obendrein ja auch riesig. Gruß, Thomas
Immer nur eine Seite der Brücke mit PWM zu betreiben ist keine so schlechte idee. Die eine Seite kann dann halt einfacher ausgelegt werden, etwa mit N-Kanal und P-Kanal MOSFETs, die auch etwas größer sein können, da sie ja nur selten umgeschaltet werden müsssen. Für die Regelung macht es bei einer Spannunsgeführten Regelung keinen Unterschied. Nur bei einer Regelung nach dem Strom müssten die Shunts an der anderen Seite sitzen. Die Auslegung der Regelschleife wäre prakitsch die gleiche, nur halt das die Ströme anders fließen. Gerade für eine Regelung in Software ist das kein Problem. Die Regelung insgesamt dürfte wohl ohnehin in 2 Stufen (als Kaskade) ablaufen einmal eine schnelle Regelung des Stroms bzw. der Spannung am Peltierelement und dann deutlich langsamer für die Temperatur. Von der Endstufe und Filterauslegung ist die Temperaturregelung so entkopplet. Die Temperaturregelung ist noch eine andere Baustell. Das wird gerne vergessen, dass so ein Peltierelement nichtlinear ist (d.h. der Wärme Strom ist nicht proprotional zum Strom) und das die Temperatur der anderen Seite als starke Störquelle auftritt. Man sollte also auch die Temperatur auf der anderen Seite auch messen und mit berücksichtigen.
Angehängte Dateien:
-

modelle.PNG
56 KB
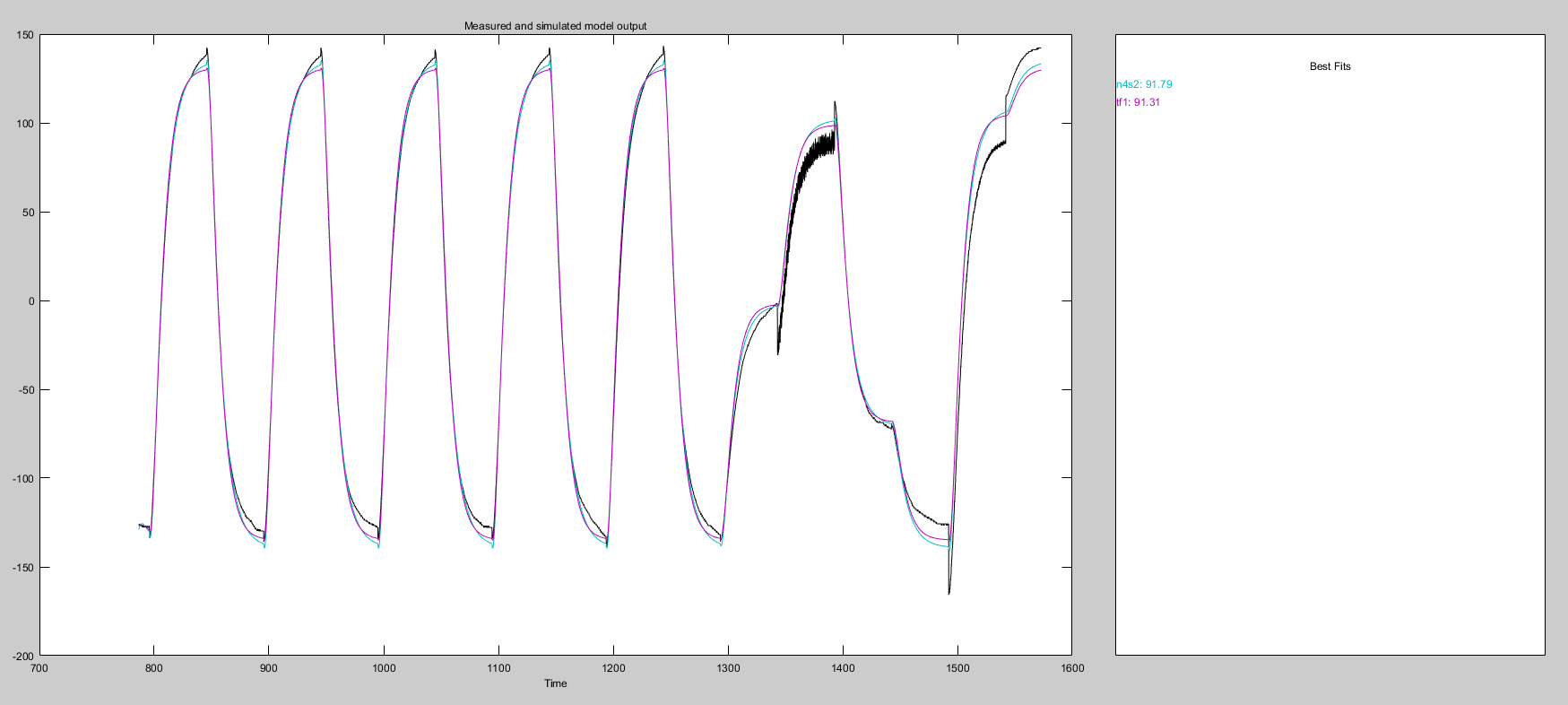
Hallo Thomas, Hallo Lurchi, @Thomas: Wenn du sagst, es ist eine gute Lösung, bin ich ja beruhigt. :D Aber danke für die Vorlage mit der Halbbrücke, sonst wäre ich auch nicht darauf gekommen. Dann wird es vermutlich auf eine simple diskrete MOSFET H-Brücke hinauslaufen, denn ein entsprechendes Relais ist tatsächlich zu groß (ca. 3 cm x 1 cm Grundfläche). Da kann ich ja auf ein ganz einfaches Design zuzurückgreifen, z.B. dieses hier: http://www.arduino-tutorial.de/wp-content/uploads/2010/06/mos-fet-h-bridge-schematics.png Die Freilaufdioden kann man sich bei einer ohmschen Last und im quasistatischen Betrieb sicher auch noch sparen. Eine Option zur Strommessung ist sicherlich nice to have, aber erstmal nicht unbedingt erforderlich, da die Regelung die Temperaturdifferenz zwischen Soll- und Ist-Temperatur verwendet und nicht den Strom. Natürlich könnte man die Strommessung als eine Art Sicherheitsmaßnahme integrieren, die bei Überschreiten des maximal zulässigen Stroms am Ausgang den Treiber abschaltet. Ich denke mal, mit einem ACS715 (https://www.pololu.com/file/0J197/ACS715.pdf) oder einem ähnlichen Sensor sollte man das recht einfach umsetzen können. @Lurchi: An sich wäre eine Kaskadenregelung natürlich möglich, allerdings wird der Regler einen Großteil der Betriebszeit nur als Festwertregler betrieben. Zudem weiß ich auch nicht, ob eine Kaskadenregelung hier überhaupt Sinn machen würde, denn der Regler an sich ist ohnehin schnell genug für die Temperatur als Regelgröße, da hier die Zeitkonstante bei etwa 45 Sekunden liegt. Klar, der Strom wird sich erheblich schneller ändern, aber das ist ja eigentlich nicht von Interesse, da ich die Versorgungsspannung so wählen werde, dass bei voller Betriebsspannung lediglich der maximal zulässige Strom durch das Peltier-Element fließen kann. D.h. wenn der Regler merkt, dass die Temperatur weit oberhalb der Solltemperatur liegt, wird er einfach die Stellgröße auf 100 % PWM Duty-Cycle setzen und damit wird dann der Maximalstrom durch das Peltier-Element fließen. Ich habe das auf diese Weise ja auch schon mit einem PI-Regler praktisch erprobt und es funktioniert sehr gut. Meinst du denn, dass sich das Führungsverhalten mit einer zusätzlichen Regelung des Stromes deutlich verbessert? Das Störverhalten dürfte ja eigentlich nur wenig beeinflusst werden, da bei sich einer Temperaturstörung der Widerstand des Peltier-Elements nur geringfügig ändert und somit der Strom kaum gestört wird. Eine direkte Stromstörung sollte ja kaum auftreten, wenn der Treiber korrekt funktioniert. Und die Nichtlinearitäten werde ich vermutlich bei der Modellierung und Reglereinstellung nicht berücksichtigen. Man kann das System ja einfach um den Arbeitspunkt (Umgebungstemperatur) linearisieren und erhält dann ein lineares Zustandsraummodell. In dem Temperaturbereich, in dem das System arbeitet, sind die Abweichungen durch Nichtlinearitäten weitgehend vernachlässigbar. Jedenfalls sagt das meine Messung (s. Screenshot). Die türkise Linie ist das lineare Zustandsraummodell 2. Ordnung und die violette ein einfaches Übertragungsfunktionsmodell mit einer Nullstelle und zwei Polen. Die schwarze Linie stellt den unabhängigen Validierungsdatensatz dar (ca. 13 Minuten Betrieb). Klar, man könnte hier auch noch nichtlineare Modelle erstellen, aber das ist mit Atomraketen auf Spatzen geschossen... Aber trotzdem danke für die Idee mit der Kaskadenregelung! Selbst wenn ich diese nun aus zeitlichen Gründen nicht umsetzen kann, werde ich sie auf jeden Fall als "Verbesserungsmöglichkeit" erwähnen. Und die Temperatur der mit dem Wärmetauscher verbundenen Seite wird auf jeden Fall auch zu Überwachungszwecken gemessen. Allerdings muss man sich die Frage stellen, ob es wirklich erforderlich ist, das System durch eine zweite Regelgröße zu verkomplizieren. Denn die Temperatur der Seite sollte theoretisch über die Prozessdauer (~ 5 Minuten) relativ konstant bleiben, wenn man von der anfänglichen Erwärmung absieht, d.h. Störungen der Temperatur auf der Rückseite dürften vernachlässigbar sein. Ich frage mich allerdings doch gerade, ob man das "Anfahrverhalten" irgendwie berücksichtigen muss, also die Zeit, in der der Kühler (ist ein einfacher Luftkühler) noch auf Raumtemperatur ist. Aber theoretisch wird das ja auch durch die Messung der Temperatur der Oberseite des Peltier-Elements mit berücksichtigt. Einen schönen Feierabend euch! Beste Grüße Lukas
Lukas B. schrieb: > @Thomas: Wenn du sagst, es ist eine gute Lösung, bin ich ja beruhigt. :D Najs, ich muss dazu allerdings schon zu bedenken geben, daß nicht alles, was ich sage/schreibe/denke unbedingt automatisch richtig ist... ;) Lukas B. schrieb: > Die Freilaufdioden kann man sich bei einer ohmschen Last und im > quasistatischen Betrieb sicher auch noch sparen. Die wirst Du gar nicht sparen können, weil Du sie schon zwangsläufig als in den FETs vorhanden mitbekommst! Wenn Du die Brücke schnuckelig klein haben willst, gibt es sicher geeignete Typen in kleineren Gehäusen. Der P-Kanal FET hier z.B. sieht auf den ersten Blick schon ganz nett aus: http://www.semicon.toshiba.co.jp/info/docget.jsp?type=datasheet&lang=en&pid=TPN4R712MD
Sofern der Strom auch bei 100% PWM noch unter dem maimalen Strom des Peltierlements bleibt, kann man auch die Kaskadenregelung wohl schon verzichten. Damit könnte man z.B. Schwankungen in der Versorgungsspannung schnell ausgleichen, noch bevor sie sich überhaupt bei der Temperatur zeigen. Auch kann man mit der Kaskadenregelung nichtlinearitäten der PWM Stufe ausgleichen - der zusammenhang PWM wert zum Strom dürfte etwas nichtlinear sein und kann ggf. etwas von der Temperatur der Drossel usw. abhängen - groß dürfte der Effekt aber nicht sein. Die nichtlinearität in Zusammenhang Strom - Wärmestrom kann schon erheblich sein, vor allem wenn man nahe an den maximalen Strom des Peltierleements geht. Bei kleinen Strömen ist der Effekt nicht so stark. Es ist aber auch relativ einfach den Effekt zu berücksichtigen - der Zusammenhang ist gut bekannt und durch eine einache Parabelfunktion zu beschreiben. Schon beim halben maximalen Strom hat man nur noch die halbe (beim kühlen) bzw. 1,5 (beim heizen) fache Steigung. Ohne Linearisierung müsste man den ungünstigesten Fall, also starkes heizen als Grundlage nutzen. Man dürfte also die Regelverstärkung bis zu 3 mal so hoch wählen wenn man in dem Bereich die Nichtlinearität berücksichtigt. Man muss also nur die Ausgabe der PWM-Reglers mit der passenden Funktion in den Strom oder gleich den PWM Wert umrechnen. Es ist also nicht besonders aufwändig. Die Temperatur der heißen Seite ist oft eine der stärksten Störgrößen. Schwankungen auf der Außenseite des Peltierelements schlagen wegen der recht guten Wärmeleitung fast 1:1 auf die andere Seite durch. Man kann dies recht einfach durch einen zusätzlichen Term proprotional zur Temperaturdifferenz über das Pentierlement berücksichtigen. Das gleiche bekommt man auch wenn man bei der Umrechnung Wärmeleistung in den Strom die Temperaturdifferenz mit berücksichtigt. Wie hoch die Wärmeleitung ist, findet man ggf. im Datenblatt, bzw. kann es realtiv leicht aus den Kenndaten berechnen - man hat also keinen weiteren freien Parameter, sondern weiss vorab recht gut wie viel man korrigieren muss. Das protential ist recht groß, da die Temperatur der heißen Seite z.B. vom Luftstrom und der Heizung durch das Peltierelement selber abhängt - die muss also nicht konstant sein. Zu Überwachung gegen Überhitzung ist die Messung der Temperatur sowieso stark zu empfehlen.
Angehängte Dateien:
-

leistungsteil.PNG
7 KB
Hallo Thomas, Hallo Lurchi, danke wieder erstmal für eure beiden Beiträge! Ich bin leider bisher nicht dazu gekommen, zu antworten, da ich gerade kaum Zeit habe und in den paar Minuten Freizeit schonmal die benötigten Bauteile in Eagle angelegt und am Schaltplan rumgebastelt habe. ;D Aber um mal bei der Vollbrücke anzusetzen: Ich wollte zwei CSD86350Q5D (http://www.ti.com/lit/ds/symlink/csd86350q5d.pdf) zur Umpolung des Peltier-Elements verwenden. Bei der 40A-Version ist der ohmsche Widerstand recht gering und die Ansteuerung erscheint mir verhältnismäßig einfach. Ich habe mal einen Screenshot vom interessanten Teil meines Schaltplans angehängt (der Rest entspricht momentan 1:1 einem Arduino Pro Mini). Ich frage mich allerdings gerade, ob die Verschaltung der beiden Halbbrücken so korrekt ist? Kann man ohne weitere Beschaltung mit den Eingängen TG und BG in den µC gehen? Oder würdet ihr noch Zusatzbeschaltung (Pullups- oder Pulldowns, entsprechende Logik zur Reduktion der benötigten Pins am µC, RC-Glied zur Vermeidung von Kurzschlüssen beim Umschalten) hinzufügen, um den Umpolvorgang zu vereinfachen? Oder ist das okay so? Das korrekte Timing des Umpolvorgangs könnte man ja notfalls auch in die Software auslagern. Und den Pin TGr kann man auch einfach offen lassen, wenn ich das Datenblatt richtig interpretiere und er lediglich der Rückführung des High-Side Drains in den Treiber dient. @Lurchi: Ich denke, ich werde den Ansatz mit dem Kaskadenregler auf jeden Fall einmal durchdenken, wenn ich mich näher mit der Reglerstruktur befasse. Der Aufwand der Implementierung dürfte nicht allzu hoch sein, da ich den Strom ohnehin erfasse und zudem den Regler als Klasse implementiert habe, sodass einfach eine zweite Instanz mit eigenen Reglerparametern ausgeführt werden kann, die dann die Regelung des Stromes übernimmt. Ich weiß gerade allerdings nicht genau, inwiefern sich die Auslegung der Reglerparameter durch die Kaskadierung ändert, da ich momentan nicht mehr wirklich in der Materie drin bin. Aber das werde ich zu gegebener Zeit durchdenken und sollte eigentlich auch kein Problem sein. Theoretisch müsste man ja zunächst einmal die Strecke (Peltier-Element + Treiberstufe) analysieren, dann den inneren Regler (Temperatur) anpassen und anschließend den inneren Regelkreis als Strecke des äußeren Regelkreises (Strom) analysieren und den äußeren Regler anhand dieses Streckenmodells auslegen, korrekt? (Wenn nicht, ist jetzt auch nicht so dramamtisch, ich werde mich damit wie gesagt nochmal genau auseinandersetzen, wenn ich mal etwas mehr als 20 Minuten Zeit habe.) Den Strom zu messen, um daraus den Wärmestrom und damit den aktuellen Betriebspunkt zu bestimmen, ist ebenfalls gar keine so schlechte Idee, der ich auf jeden Fall auch nachgehen werde. Ich werde davor auch mal einige Messungen durchführen, in denen das Peltier-Element in die Maximalbereiche gebracht wird und dann sehe ich ja, wie groß die Abweichungen durch etwaige Nichtlinearitäten ungefähr sind. Wenn diese nur bei wenigen Prozent liegen, kann man sich den Aufwand vermutlich sparen. Wenn es aber 10 %... 20 % sind, könnte man natürlich über die Implementierung der besagten Korrekturfunktion nachdenken. Die reine Implementierung ist hier ja auch gar nicht so schwer, aber natürlich muss das auch wieder alles getestet und die korrekte Funktion validiert werden. Wenn ich deinen letzten Absatz richtig verstanden habe, schlägst du also vor, in die Stellgrößenberechnung des Reglers (aktuell der ganz normale PI-Algorithmus mit der Temperatur der kalten Seite als Regelgröße) einfach einen weiteren P-Term einzufügen, der das Verhältnis der beiden Temperaturen berücksichtigt? Das würde aber wieder die Einstellung deutlich verkomplizieren, da ich ja dann einen weiteren freien Parameter hätte. Aber versuchen kann ich es natürlich einmal. Aber wie du siehst, muss ich mich erstmal noch ein wenig mit dem ganzen Konzept auseinandersetzen, bevor ich so detailliert einsteigen kann und wir eine konstruktive Diskussion über das Thema führen können. Erst einmal muss die Regelstrecke, sprich die Schaltung, funktionieren, ansonsten stehe ich vor dem Problem, dass ich den Regler weder auslegen noch bewerten kann. Ich wünsche euch noch einen schönen Abend! Viele Grüße Lukas
Hi Lukas, Lukas B. schrieb: > Kann man ohne > weitere Beschaltung mit den Eingängen TG und BG in den µC gehen? ganz so einfach ist es leider nicht! Damit der High-Side FET richtig einschaltet, muss dessen Gate (TG) um min. 4V über seiner Source-Spannung (=OUT) liegen. Wenn also am Peltier-Element z.B. 4V anliegen sollen, müsste der Mikrocontroller min. 8V High-Pegel liefern. Wenn am Peltier-Element >8V anliegen sollen, reicht es bei 12V Versorgungsspannung nicht mal aus, diese auf das Gate zu legen, sondern man bräuchte eine Hilfsspannung >12V. Wie die Ansteuer-Schaltung der Brücke letzendlich aussehen kann, hängt also auch davon ab, wie hoch die maximale Ausgangsspannung im Vergleich zur Versorgungsspannung werden kann. So ganz erschließt sich mir der Vorteil des CSD86350Q5D gegenüber Einzeltransistoren nicht: mit 5x6 mm Grundfläche ist er schon fast so groß, wie 4 Stück 3x3mm MOSFETs, kostet einen Haufen Geld (2,50 Euro bei Digikey) und seine Ansteuerung ist auch nicht einfacher als bei Einzeltransistoren. Zwei AON7522 z.B. dürften den Job eines CSD86350Q5D hier genauso erledigen, kosten zusammen nicht mal einen Euro und brauchen weniger Fläche, als die integrierte Brücke. Vermutlich wird das Layout damit auch noch einfacher, weil die Power-Leitungen nicht zur Brücke geführt werden müssen, sondern die FETs an den Power-Leitungen platziert werden können. Gruß, Thomas
Die extra Regelung des Stromes sehe ich als nicht so wichtig. Die PWM stufe ist vermutlich nicht so sehr nichtlinear. Im Zweifelsfall könnte man da auch eine Experimentell betimmte Korrekturfunktion nutzen. Der Kaskadenregler ist ein kleines bischen mehr als nur 2 Regler in einander. Bei der Anti Windup Behandlung sollte man die Sättigung der inneren Schleife auch als Kriterium für die Sättigung der äußeren nutzen. Das gibt es also eine kleine Änderung / Ergänzung. Die Schleife zur Stromregelung dürfte sehr viel schneller sein - entsprechend sollte da eine einfache Regelung ausreichen, ohne feinen Abgleich. Die Nichtlinearität kann beim Peltierelement recht groß werden - etwa die halbe Steigung beim halben Nennstrom zum kühlen. Bei mehr Strom auch noch mehr. Das angenehme dabei ist, dass man die Form der Kurve eigentlich aus den Daten zu Peltierlelement ablese kann: Der Wärmestrom folgt einer Parabel, mit maxiamler Kühlleistung beim Nennstrom und 0 ohne Strom - es gibt also keine zusätzlichen freien Parameter dazu. Ein Parameter kommen ggf. dazu bei der Umrechung PWM Wert in den Strom, sofern man da nicht nachregelt. Für die Berücksichtig der Temperatur der warmen Seite hat man 2 Möglichkeiten: einmal als Feed Forward, mit einem zusätzlichen Proportional-term, der erst einmal frei ist. Die Alternative wäre es bei der Umrechnung Leistung in PWM Wert bzw. den Strom die Temperaturdifferenz und die Leitfähigkeit des Peltierlements zu berücksichtigen. Die eigentliche Regelung kann dann unverändert sein. Den Parameter Leitfähigkeit bekommt man üblicherweise aus dem Datenblatt, entweder direkt oder durch umrechnen. Entsprechend kann man auch den passenden Parameter für das Feed forward aus der Leitfähigkeit berechnen, so dass man auf die Gleiche Regelung kommt. Die Form mit extra Vollbrücke ist übertreiben. Es reicht eine getaktete Halbbrücke und eine nur zum Umpolen. Damit ändert sich zwar die Regelung je nach Polung, aber für einen Lösung im µC ist das kein Problem, da sich nur das Vorzeichen und der Bezugspunkt ändert, die Zeitkonstanten bleiben gleich.
Angehängte Dateien:
-

Schaltplan2.png
34 KB
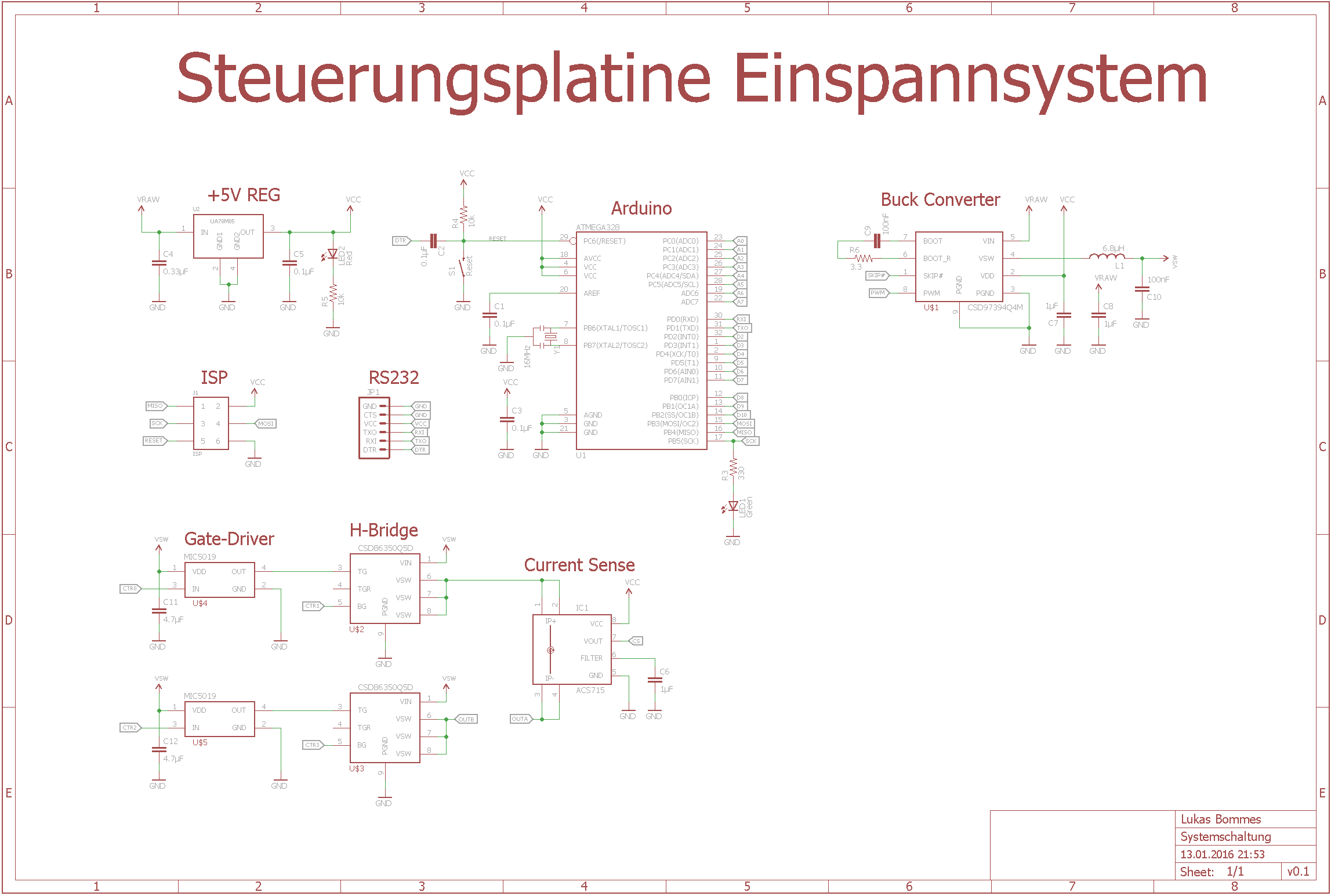
Hallo Thomas, Hallo Lurchi, @Thomas: Ich hätte einfach mal das Datenblatt lesen sollen. ;D Aber vielen Dank für die hilfreiche Erklärung. Ich habe es jetzt so gelöst (s. Schaltplan), dass ich für jeden der beiden High-Side FETs eine eigene Ladungspumpe, deren Ausgangsspannung etwa 4 V über der Eingangsspannung liegt, eingesetzt habe. Sicher könnte man das auch noch auf eine Pumpe reduzieren, aber warum sollte man es unnötig kompliziert machen? Die eigentlichen Bauteilkosten spielen bei dem Projekt aufgrund der geringen Stückzahl (2..3 Boards) eigentlich keine Rolle. Viel entscheidender sind die Versandkosten bei den Herstellern und die sind bei TI mit 7 Dollar noch recht moderat. Ich muss allerdings gestehen, dass ich noch nicht nachgeguckt habe, woher man den AON7522E beziehen kann und welche Versandkosten man dort einplanen muss. Würde es denn in Hinblick auf die Funktion der Schaltung einen Unterschied machen, ob die FETs entweder direkt an der Zufuhr der Versorgungsspannung liegen oder stattdessen neben dem Buck-Converter platziert sind? Eigentlich dürfte das doch vollkommen gleichgültig sein, oder? In dem Fall hätte der CSD86350Q5D den Vorteil, dass ich nur zwei Chips hätte und keine vier. Aber platztechnisch ist die Schaltung ohnehin nicht mehr so kritisch, wenn ich es so umsetze wie aktuell geplant, da ja keine großen Bauteile mehr verwendet werden. Ich vermute mal, es ließe sich sogar noch problemlos ein USB-RS232-Wandler (http://www.ftdichip.com/Support/Documents/DataSheets/ICs/DS_FT232R.pdf) unterbringen. Wobei ich erst noch diesbezüglich die Spezifikation abklären muss, ob überhaupt eine USB-Schnittstelle nötig ist. @Lurchi: Besten Dank auch dir für die vielen nützlichen Tipps! Was das Anti-Windup anbelangt, so habe ich alle Werte auf 1023 normiert und auch entsprechend begrenzt (sprich den Maximalwert, den mit der 10-bit ADC bei Messung einer beliebigen Messgröße des Systems liefert). Lediglich die Stellgröße des Reglers wird innerhalb der PWM-Ausgabefunktion nochmal herunterskaliert auf den entsprechenden benötigten Wert des Timer-Registers. Aber das hat ja theoretisch keinerlei Auswirkung auf die Reglerstruktur, da der Regler mit einem Wert von 0 bis 1023 arbeitet. Sprich, damit dürfte sich ja dann auch eigentlich kein Unterschied zwischen dem inneren und äußeren Regelkreis hinsichtlich der Sättigungsgrenzen ergeben, wenn ich das Problem richtig verstanden habe. Aber ich will mich jetzt auch nicht zu weit mit Spekulationen aus dem Fenster lehnen, denn ohne es tiefer durchdacht zu haben, sind das erstmal alles nur grobe Ideen. Ich bin aber natürlich trotzdem sehr dankbar, dass du die ganzen Problematiken und Verbesserungsmöglichkeiten ansprichst, denn später von alleine auf so etwas zu kommen, ist natürlich ungleich komplizierter. Die Variante mit dem Vorregler kann ich mir jetzt noch gut vorstellen und sie ließe sich auch recht problemlos implementieren. Die zweite Variante erscheint mir etwas einfacher, wenn ich darüber nachdenke. Ich soll also quasi nur den Zusammenhang Wärmestrom -> Temperaturdifferenz aus dem Datenblatt ermitteln (ist ja meist eine lineare Funktion, ansonsten reicht hier sicher auch eine lineare Näherung) und dann auf Basis der gemessenen Temperaturdifferenz die Stellgröße des Reglers berechnen. Korrekt? Allerdings ist mir gerade etwas unklar, wie mit dem berechneten Stellwert weiter verfahren werden sollte. Man hat in dem Fall ja einen Stellwert aus dem PI-Regler und einen weiteren, i.A. davon abweichenden Stellwert, aus deiner vorgeschlagenen Berechnungsfunktion für den Wärmestrom. Man kann die beiden Werte ja nicht einfach addieren, wie es aus dem Blockschaltbild der Vorsteuerung hervorgeht. Und ja, wenn es darum ginge, den letzten Cent aus der Schaltung zu holen, gebe ich dir Recht. Aber ein symmetrisches Verhalten ist natürlich schon schöner, weil man dann nicht immer umdenken muss und die Software nicht unnötig verkompliziert wird. Euch beiden noch einen schönen Abend! Und wie gesagt danke für die ganzen Ratschläge, das hilft ungemein in der aktuellen Phase des Ideensammelns bzw. beim Aufbau der Schaltung! Viele Grüße Lukas P.S. Dass im Schaltplan die Zuordnungen der Netze zwischen µC und dem Treiber noch nicht passen, ist mir bewusst. Ich muss erst noch herausfinden, welche Pins z.B. geeignet sind, um dort das benötigten 2 MHz PWM-Signal auszugeben.
Lukas B. schrieb: > Würde es denn in Hinblick auf die Funktion der Schaltung einen > Unterschied machen, ob die FETs entweder direkt an der Zufuhr der > Versorgungsspannung liegen oder stattdessen neben dem Buck-Converter > platziert sind? Hallo Lukas, für die Schaltung Umpol-Halbbrücken ist es eher egal, da hier praktisch nur Gleichspannung im Spiel ist. Vom PCB-Layout her war das eher aus dem Bauch heraus, daß es einfacher ist, vier beliebig platzierbare Bauteile zu haben, zu denen jeweils drei Leiterbahnen gehen, als zwei Bautele mit jeweils fünf Leiterbahnen zu routen. Der AON war auch nur ein Beispiel, ähnliche Produkte gibts sicher auch von anderen Herstellern und anderen Lieferquellen, als Digikey. Auf 1-2 mOhm mehr oder weniger kommt es bei den hier erfordelichen Stömen ja auch nicht an. Lukas B. schrieb: > um dort das benötigten 2 > MHz PWM-Signal auszugeben. Na, na, jetzt schon 2 MHz? Übertreibst Du es da nicht mit der Frequenz ein bisschen? Frequenz 'rauf für kleine Bauteile ist ja schön und gut, aber es steigen auch die Anforderungen an das PCB-Design und die Schaltverluste in der Leistungsstufe. Wenn ich das richtig verstehe, soll der µC direkt die PWM 2MHz und mit einer Duty-Auflösung von 1024 ausgeben - gibt es sowas überhaupt? Nach der Funktion einer klassischen PWM müsste der Timer ja dann mit 2 GHz getaktet werden!? Der Ausgangskondi (C10) ist mit 100 nF m.E. etwas dürftig ausgelegt, ein paar µF sollte der schon haben! Die Induktivität ist ja auch kein ideales Bauteil und hat eine parasitäre parallel-Kapazität... Gruß, Thomas
Hallo Thomas, dann werde ich es vermutlich erst einmal beim CSD86350Q5D belassen, da ich nun auch schon in mühevoller Kleinarbeit das Package in Eagle erstellt habe. Sollte es beim Layout Schwierigkeiten geben, kann ich ja immer noch auf einzelne MOSFETs umsteigen. Mit der PWM-Frequenz sprichst du allerdings ein Problem an, dass mir gar nicht so bewusst war, tatsächlich aber noch ein wenig Arbeit erfordert. Warum ich oben auf die 2 MHz gekommen bin, weiß ich gar nicht mehr, aber vermutlich weil das Simulationsergebnis damit einfach schöner aussah. Aber in Hinblick auf die Signalerzeugung hast du natürlich vollkommen recht, dass der µC hier schon an seine Grenzen stößt. Wenn ich (wie momentan mit den 50 kHz) den 16-bit Timer des Mega328 im Betriebsmodus "phase correct PWM" nutze, reduziert sich die Auslösung von 10 bit auf 3 bit, d.h. ich habe nur noch 8 unterschiedliche Werte, um den PWM-DutyCycle abzubilden. Das ist natürlich Käse in Hinblick auf die Regelung des Systems. Ich werde mich demnächst nochmal durch das Datenblatt des µC ackern und gucken, ob man mit Fast PWM noch etwas mehr herausholen kann. Nicht phasenkorrektes PWM sollte ja theoretisch zu einer Verdopplung der möglichen Werte führen, also ergäben sich damit 4 bit Auflösung, was aber immer noch zu wenig ist. Alternativ müsste ich einen separaten PWM-Generator nutzen. Allerdings habe ich bisher nur welche mit analogem Steuereingang gefunden (z.B. http://www.linear.com/solutions/5290). Das PWM-Signal des µC erst in ein analoges Signal zu wandeln, dieses in den LTC6992 zu speisen und daraus anschließend ein 1 MHz-PWM-Signal zu erzeugen, ist natürlich in höchstem Maße unelegant. Schöner wäre es, wenn es einen Generator gäbe, den man z.B. über TWI ansteuern können. Aber leider habe ich so etwas noch nicht gefunden. Hast du eine Idee, was man hier machen könnte? 10 bit Auflösungen benötige ich im Übrigen nicht unbedingt. Aktuell habe ich einen Wertebereich von 0 bis 160, mit dem der Duty Cycle eingestellt wird und das ist vollkommen ausreichend für die Regelung. Weniger sollte es allerdings nicht sein.
Der Umweg über ein analoges signal zur Steuerung des PWM generators / Schaltereglers ist nicht so abwegig. Dann könnte man da einen fertigen buck Regler nutzen, der ggf. auch gleich auf den Strom regeln kann. Damit wäre die innere Schleife für den Regler extern in Hardware erledigt. Die meisten der Regler ICs werden eher für einzelne MOSFETs als eine fertige Brücke Ausgelegt sein. Die Frequenzen werden auch da in Regel niedriger sein. So etwas wie 2 MHz Takt ist etwas für ein kleine Lösung wo alles auf einem Chip ist, nichts für eine zusammenschusterte Lösung. Sofern man keine großen Erfahrungen mit dem Layout hat sollte man mit der Frequenz auch nicht so unnötig hoch gehen. Das führt zu hohen Schaltverlusten und macht das Layout umso kritischer. Eine brauchbare Auflösung für das PWM Signal vom AVR bekommt man halt nur bis etwa 100 kHz. Mehr ginge wenn man statt Arduino einen Tiny461 oder ähnliche nutzt - der hat kann eine etwa 3 mal höhere PWM Frequenz nutzen. Anti Windup hat wenig mit der Auflösung der Rechengrößen zu tun. Da geht es zu erkennen wann der Regler den linearen Bereich verlässt, um zu verhindern das die Integralgleider (meist sowieso nur eines) unnötig groß werden. Dazu muss man möglichst gut erkennen wann die Stellglieder ans Limit kommen. Das setzt sich beim Kaskadenregler einfach von der inneren Schleife in die äußere fort - mehr ist da eigentlich nicht zu beachten. Die Rechengrößen sollte eher etwas mehr Auflösung haben als der ADC, damit man nicht unnötig große Rundungsfehler einbaut. Erst bei der Ausgabe rundet man dann, ggf. auch noch mit einer Sigma-Delta ähnlichen Form um Rundungsfehler im Mittel auszugleichen. Der zweite Weg zur Berücksichtigung der 2. Temperatur am TE bietet sich an wenn man auch die Linearisierung macht: Der PID regler berechnet als Stellgröße die Wärme-Leistung die das Pletierelement leifern soll. Die Funktion zur Linearisierung liefert dann die Umrechnung von der Leistung in den Strom und berücksichtigt dabei auch die Temperaturdifferenz. Im Prinzip hat man die den Wärmestrom die Formel Q(T1,T2,I) = A (T1-T2) + Q_max ((1-I/I_max)²-1) , die man dann in I (Q,T1,T2) umformen muss. Das Datenblatt sollte die Parameter (A,Q_max und I_max) verraten. Bei den Parametern Q_max und I_max muss man ggf. etwas aufpassen, weil die Datenblätter i.A. perfekten Wärmekontakt annehmen - real werden die Werte etwas kleiner werden, oder alternativ die Temperatur der warmen Seite noch etwas für den Wärmewiderstand korrigiert werden müssen. Ungefähre Werte sind aber immer noch deutlich besser als einfach nur eine Lineare Näherung.
Hi, also wenn ich da nichts übersehen habe befeuerst du dein L/C immernoch mit einer 1/2 H-Brücke? Weiterhin wolltest du Gleichspannung fürs Peltier? Warum baust du dann deine PWM-Geschichte für die Spannung nicht wie einen Step-Down Regler mit Diode und einem passendem P-Fet. Wenn ich jetzt ganz "böse" bin sage ich ein TL494 analog mit Soll+Istwert,IRF4905,MBR2040,68-100µH Drossel und einem guten Kondensator beschaltet sollte dein Problem schon klären. Bei meinem Lötkolben geht das jedenfalls schon sehr lange so. Ob die H-Brücke zum Umschalten wirklich notwendig ist kann ich mir noch nicht ganz vorstellen obwohl ich den Gedanken so schlecht nicht finde. Meine Überlegung ist aber wenn du das wirklich brauchst wäre es vermutlich eine sehr genaue Temperaturreglung die dann aber so oft umschaltet das erneut AC an deinem Peltier ansteht. Das wolltest du aber nicht haben. nur mal so als Gedanke....viel Erfolg, Uwe
Der Regler für die Temperatur kann schon auch linear arbeiten. Nur um 0 gibt es ggf. einen kleinen Bereich wo man so kleine Ströme nicht gut einstellen kann. Da hätte man dann ggf. einen On/Off Regler mit kleinem Strom (z.B. 50 mA) - bei so kleinem Strom ist das dem Peltierlement aber auch relativ egal. Die Stufe zur Spannungsreduktion könnte aber wirklich einen deutlich größeren Kondensator vertragen. Die obere Hälfte der Halbbrücke ersetzt sozusagen die Diode beim einfachen Buck Regler. Wenn eine hohe Effizienz nicht gefordert ist, ginge es ggf. auch mit Diode. Nur eine Halbbrücke mit PWM Signal zu treiben ist schon OK. Für die andere Seite würde halt auch eine quasi statische Halbbrücke ausreichen, wenn man das PWM Signal per µC erzeugt - das wäre einer der wenigen guten Gründe hier kein externes Regler IC zu nutzen. Wenn das PWM-Signal vom Regler IC kommt, ist die zusätzliche Vollbrücke wohl schon besser. Etwas moderner als TL497 sollte das aber schon sein - eher was in die Richtung MAX8576 (nur so als Beispiel).
Hi, >Nur eine Halbbrücke mit PWM Signal zu treiben ist schon OK und genau da gehe ich jetzt nicht ganz mit weil bei schlechter Dimensionierung Strom auch rückwärts aus dem Elko entladen wird. es sind Regler auf dem Markt die das können, aber mit einer normalen Halbbrücke sehr riskant. > Etwas moderner als TL497 sollte das aber schon sein - eher >was in die Richtung MAX8576 Natürlich darf es auch etwas moderner sein, aber es geht. Viel Erfolg, Uwe
Angehängte Dateien:
-

Schaltplan_Schema.PNG
190 KB
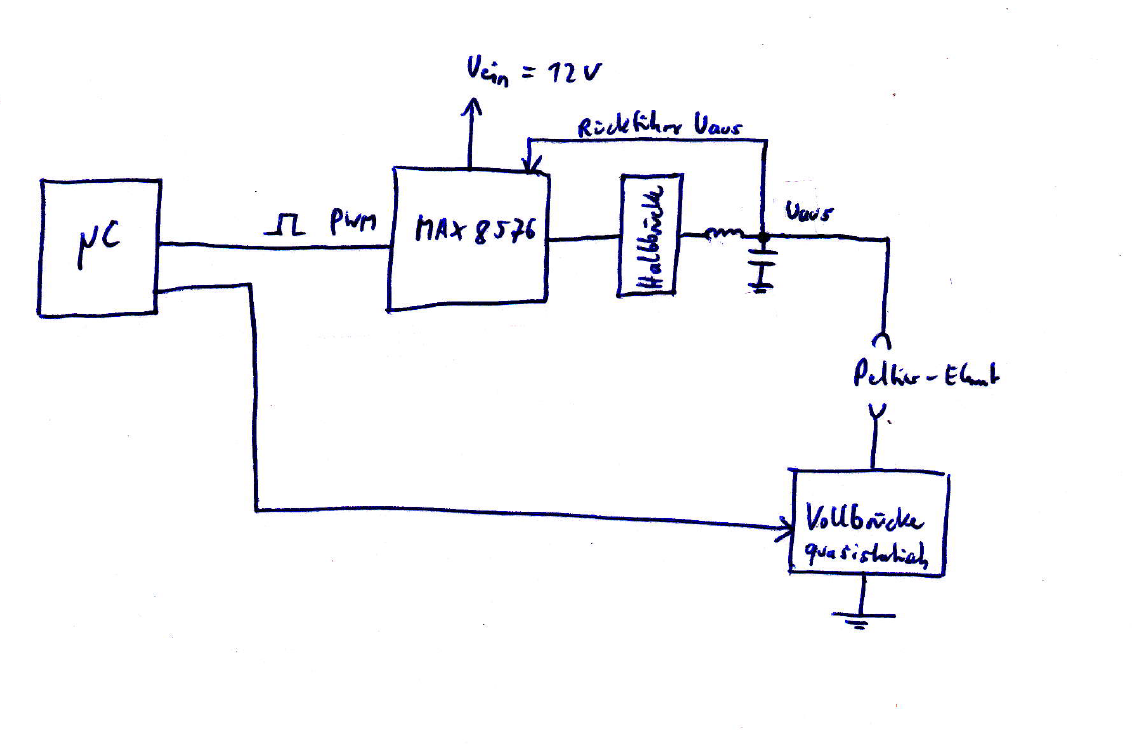
Hallo Uwe, Hallo Lurchi, vielen Dank für eure Meinungen zu der Schaltung. Die Idee, die Stromregelung direkt innerhalb der Hardware umzusetzen, gefällt mir sehr gut. Allerdings ist mir noch nicht ganz klar, inwiefern z.B. der MAX8576 hier weiterhilft. Wenn ich mir die vorgeschlagenen Schaltungen (S. 10) angucke, so wird dort ja nur die Ausgangsspannung konstant gehalten, wobei der Sollwert über einen Spannungsteiler festgelegt wird. Oder soll der MAX8576 so ausgelegt werden, dass im aktivierten Zustand der Maximalstrom durch das Peltierelement fließt (und durch die Spannungsregelung des ICs dann konstant gehalten wird)? Die tatsächliche Ausgangsleistung wird dann über das PWM-Signal an Q3 gesteuert, richtig? Taktet der MAX8576 den Ausgang denn mit einer von der Eingangsfrequenz unabhängigen Ausgangsfrequenz? Sprich, könnte ich z.B. vom µC einfach mit einem 10 kHz PWM-Signal den MAX8576 ansteuern und dieser regelt dann davon unabhängig die Ausgangsspannung? Sollte das zutreffend sein, so hat man aber ja am Ausgang wieder eine konstante Spannung anliegen, auf die das PWM-Eingangssignal aufmoduliert ist. Oder wird das alles durch die Kombination L1, C9, C10 (S.10 im Datenblatt) weggefiltert? Ich habe mal eine Skizze angehängt, wie ich mir die Schaltung momentan vorstelle. Sprich, wenn ich euch richtig verstanden habe, erstzt das Regler-IC nun einfach den CSD97394. Und die Schaltfrequenz an der Vollbrücke ist im momentan geplanten Betriebszustand so gering (~ 0,05 Hz), dass man statischen Betrieb annehmen kann, d.h. hier sollte man noch ohne Weiteres von Gleichsströmen reden können.
Hallo Uwe, Uwe schrieb: > und genau da gehe ich jetzt nicht ganz mit weil bei schlechter > Dimensionierung Strom auch rückwärts aus dem Elko entladen wird. Welcher Elko? Bei den hier angedachten Betriebsfrequenzen sehe ich da nur Multilayer-Keramik. Und wenn der Strom mal rückwärts fließt, wäre das auch kein Problem - schließlich wird er dann einfach wieder der Quelle zugeführt. Daß man mit einem Peltier-Element sinnvoll rekuperieren kann, kann ich mir allerdings kaum vorstellen! ;) Aber ich vestehe schon: Du meinst, daß bei zu wenig Laststrom der Strom in der Induktivität "lückt" (oder dann bei synchroner Ausgangsstufe eben in der Gegenrichtung fließt). Das dürfte bei der vergleichsweise recht hohen Last durch das Peltier-Elements hier aber nicht der Fall sein. > es sind Regler auf dem Markt die das können, aber mit einer normalen > Halbbrücke sehr riskant. Was soll da "riskant" sein? Es gibt Regler mit synchroner Ausgangsstufe, die unter starker "Unterlast" in einen Dioden-Modus schalten, um dadurch die Schaltfrequenz und somit die Schaltverluste reduzieren zu können. Das braucht man aber nur, wenn der Regler ohne nennenswerte Last läuft, um ein paar mA einzusparen. "Riskieren" tut man da nichts (außer eben ein paar mA mehr Ruhestrom), wenn man den Regler auch ohne Last voll synchron durchlaufen lässt.
Hallo Lukas, Lukas B. schrieb: > Die tatsächliche > Ausgangsleistung wird dann über das PWM-Signal an Q3 gesteuert, nein - an Q3 soll sicher kein PWM-Signal angelegt werden, das soll wohl einfach ein "enable" Signal sein. Ich würde das Ganze so machen: vom µC kommt ein analoges Steuersignal in Form einer Spannung (per D/A-Wandler oder ersatzweise relativ niederfrequente PWM mit einfachem RC-Tiefpass gefiltert). Diese Steuerspannung wird zur Spannung vom Spannungsteiler am FB-Pin zugemischt, um so den Regler steuern zu können. Außer A/D-Wandler oder standard-PWM gibt es noch andere Methoden, dem µC eine analoge Steuerspannung zu entlocken.
Normal wird bei den meisten Schaltreglern die Spannung über den Teiler in der Rückkopplung eingestellt. Man kann dies aber auch so abändern, dass die Ausgangsspannung einer Steuerspannung folgt (ggf. mit einem Offset). Der µC gibt dann über einen DAC den Sollwert für den Strom vor. Alternariv könnte man den Teiler auch als Digitalen Poti auslegen und so den Strom einstellen - allerdings ist da die Auflösung ggf. eher schlecht. Der Rückstrom über die Halbbrücke ist tatsächlich nicht schön, weil sich damit der Wirkungsgrad reduziert. Allerdings tritt dies bei eher kleinen Strömen auf. Es ist trotzdem ärgerlich den Strom hin und her zu schalten und so nur extra Verluste und Rippel zu erzeugen. Da wäre es vermutlich besser bei kleinen Strömen, wo lückender Betrieb auftritt die Bücke anders zu steuern und ggf. eine Freilaufdiode zu nutzen.
Hi, @Thomas Elger >die unter starker "Unterlast" in einen Dioden-Modus schalten, um dadurch >die Schaltfrequenz und somit die Schaltverluste reduzieren zu können. hoffentlich irrst du dich da nicht. Ich meine der untere Transistor ist gerade bei hohen Strömen und kleinen Spannungen ein + beim Wirkungsgrad weil da die Diode überbrückt wird. Lukas B. schrieb: > Die tatsächliche > Ausgangsleistung wird dann über das PWM-Signal an Q3 gesteuert, nein, aber wer hindert dich die Rückführspannung am FB_Pin zu beeinflussen. Es sind bestimmt auch Regler zu bekommen wo beide Anschlüsse des Regel-OV nach aussen geführt sind. Da kannst du einen eigenen Sollwert vorgeben. Du kannst auch deinen µC die PWM erzeugen lassen, wobei dich dann das Baugrössenproblem erneut einholt. Wie auch immer viel Erfolg, Uwe
Besten Dank für die angeregte Diskussion. :D Dass Steuersignal in die Rückführung einzuspeisen klingt logisch. Aber nochmal ganz von vorne, da ich momentan etwas die Befürchtung habe, dass die Schaltung mit dem Stromregler doch sehr komplex würde und die Auslegung recht viel Zeit in Anspruch nehmen könnte (geschweige denn das Debugging der fertigen Schaltung). Was spräche denn dagegen, den Aufbau so zu belassen, wie er aktuell ist (s. Schaltplan in einem meiner obigen Beiträge) und die Erzeugung des PWM-Signals für den Buck Converter von einem PWM-Generator IC, wie beispielsweise dem LTC6992, übernehmen zu lassen. Wenn ihr sagt, dass diese Lösung gar nicht so unüblich ist, könnte man auch hier einfach die analoge Steuerspannung über ein niederfrequentes PWM-Signal und ein RC-Glied erzeugen. Dies wäre ja hinsichtlich der Bauteilgrößen kein Problem, weil nur ein sehr kleiner Strom flösse. Die konstante Eingangsspannung des Systems (Vraw im Schaltplan) wähle ich dann einfach genau so groß, dass bei 100 % PWM-Duty Cycle der maximal zulässige Strom von 8,5 Ampere durch das Peltier-Element fließt. Oder bietet der MAX8576 abgesehen davon, dass die Ausgangsspanung geregelt ist noch weitere Vorteile gegenüber der aktuellen Lösung mit dem CSD97394Q4M? Mir geht es auch darum, die Schaltung nicht zu kompliziert werden zu lassen, sondern einfach einen solide funktionierenden Treiber für das Peltier-Element zu haben. Aspekte wie Effizienz und Kosten spielen bei meiner Anwendung keine große Rolle, sofern sie sich im halbwegs sinnvollen Rahmen bewegen. Wenn ihr natürlich der Anschicht seit, dass der MAX8576 auf jeden Fall riesige Vorteile gegenüber dem CSD97394Q4M bietet, könnte ich mich natürlich nochmal genauer mit dieser Variante auseinandersetzen. Schönen Nachmittag noch! Grüße Lukas P.S. Den Ausgangskondesator habe ich jetzt erstmal mit 10 µF gewählt. Sollte ich hier noch deutlich höher gehen? Bei der Beispielsschaltung des MAX8576 sind ja 4400µF angegeben (wobei hier die Frequenz auch nur bei 100 kHz und nicht bei 1 MHz liegt).
Lukas B. schrieb: > wobei hier die Frequenz auch nur > bei 100 kHz und nicht bei 1 MHz liegt Unter 100 KHz zu bleiben ist auch aus EMV Gründen zu empfehlen.
Angehängte Dateien:
-

Schaltplan3.png
43 KB
Unter 100 kHz wäre ja dann nur mit dem MAX8576 realisierbar. Ansonsten würde ja wieder das anfängliche Problem auftreten, dass eine sehr große Induktivität nötig wäre, die aber zuviel Bauraum einnimmt. Aber sofern ich die Hochfrequenzbausteine möglichst nahe beieinander platziere, sodass quasi das PWM-Signal vom Generator 2..3 mm durch eine Leiterbahn zurücklegen muss, bevor es in den Buck Converter eingespeist wird, ist das sicherlich auch kein allzugroßes Problem, oder? In der näheren Umgebung des Systems befinden sich auch keine anderen Schaltungen, die gestört werden könnten. Im Bild ist nochmal die Lösung mit dem LTC6992-1 zu sehen, wobei der RC-Filter zwischen µC und MOD-Pin noch fehlt und die externen Bauteile noch nicht korrekt ausgelegt sind. Die Lösung erscheint mir momentan die am einfachsten umzusetzende zu sein, da hier nicht soviel Zusatzbeschaltung nötig ist wie z.B: beim MAX8576. Viele Grüße Lukas
Joe F. schrieb: > Unter 100 KHz zu bleiben ist auch aus EMV Gründen zu empfehlen. Da waren wir schonmal ganz am Anfang! Diesem Ansatz stand allerdings die Baugröße einer für diese niedrige Frequenz notwendigen, großen Induktivität entgegen. Und Lukas: Effiziens ist sehr wohl wichtig, wenn die Baugröße beschränkt ist, da ein ineffizienter Konverter mehr Verlustwärme produziert, die auf einer kleinen Baugruppe mehr Probleme bereitet. Wenn Du z.B. mit einem Wirkungsgrad von 85% 50W umsetzt (12V x 4A), sind das immerhin 7,5W Verluste, die einer 4x4cm Baugruppe schon ordentlich zu schaffen machen können. Bei einem Wandler mit 93% Witkungsgrad kommt es weniger darauf an, daß er 8% besser ist, sondern daß er weniger als 50% Verlustwärme produziert! Lukas B. schrieb: > dass der MAX8576 auf jeden Fall > riesige Vorteile gegenüber dem CSD97394Q4M bietet Ich glaub, Du hast da was noch nicht ganz verstanden: der eine ersetzt nicht den anderen, sondern es gehören eigentlich beide auf die Platine! der MAX8576 ist ein Controller (der erzeugt aus einer Soll- und Ist-Größe ein PWM-Steuersignal), der CSD97394Q4M ist eine Power-Stage, die gesteuert durch ein PWM-Signal (z.B. vom MAX8576 oder vom LTC6992) eine Last schaltet. Gruß, Thomas Edit: Korrektur - stimmt nicht so ganz: der MAX8576 ist nicht mit dem LTC6992 austauschbar, was die Powerstage betrifft. Der MAX ist für die Ansteuerung von diskreten Einzeltransistoren konzipiert.
Uwe schrieb: >>die unter starker "Unterlast" in einen Dioden-Modus schalten, um dadurch >>die Schaltfrequenz und somit die Schaltverluste reduzieren zu können. > hoffentlich irrst du dich da nicht. Ich meine der untere Transistor ist > gerade bei hohen Strömen und kleinen Spannungen ein + beim Wirkungsgrad > weil da die Diode überbrückt wird. Ja, eben, die synchrone Brücke ist immer im Vorteil, wenn ein nennenswerter Laststrom fließt, und besonders extrem bei kleinen Ausgangsspannungen, weil hier der volle Laststrom die meiste Zeit durch die Diode fließt. Der Diodenmodus wird dann interessant, wenn kein bzw. kaum Strom benötigt wird. Im Extremfall (kein Laststrom) wird dann nur ab und zu mal der High-Side FET für einen kurzen Impuls eingeschaltet, um den Ausgangsskondensator nachzuladen.
Das Schaltregler IC ersetzt nicht nur den PWM Generator, sondern meist auch die Gate Treiber für MOSFETs. Man hat also sozusagen die Wahl zwischen µC mit schnellen PWM + Halbrücken IC oder schneller DAC + PWM Generator + Halbrücken IC oder DAC + Schaltregler IC + 2 einzelne MOSFETs Der oben von mir vorgeschalgen max8576 könnte von der Leistung ggf. auch etwas knapp sein, insbesondere wenn man eine hohe Schaltfrequenz anstrebt. Ein besser Wahl wäre wohl so etwas wie LT3741 - da ist die externe Steuerung und eine Stromregelung auch gleich vorgesehen. Der Vorteil wäre halt, dass die Stromreglung ein fertiges IC übernimmt, ohne Einschränkung etwa durch die Quantisierung beim PWM Signal. So kompliziert ist die externe Beschaltung auch nicht - da sind ja die Halbrücke, der LC Filter, ggf. Strommessung und Eingangskondensatoren schon mit drin. Wenn der µC auch noch die Stromregelung über nehmen soll, muss der schnell sein und das Signal auch schnell zum PWM generator übertragen, einfach nur PWM mit Glättung fällt da schon mal aus. Der PWM generator mit DAC ersetzt auch nur einen schnellen PWM Ausgang des µC - auch da gäbe Alternativen zum klassichen AVR-Mega (tiny461, Xmega, ARM, ...). Mit nur 100 kHz Schaltfrequenz wäre ggf. auch der normale AVR noch gerade so ausreichend. Wegen des weitgehend konstanten Lastwiderstandes dürfte man bei nicht zu knapp gewählter Induktivität auch kaum in den Bereich des lückenden Stromes kommen. Da sind also keine Probleme zu erwarten. Je höher die Schaltfrequenz, desto kritischer wird die Wahl der MOSFETs und das Layout - bei 1 MHz wird man da ggf. ein paar Versuche mit einplanen müssen bis es läuft und EMV mäßig geht. Die kleine Brücke mit Integreitem Treiber ist dafür im Prinzip gut, muss aber auch gekühlt werden.
SGuten Abend alle zusammen! Habe mal eine kleine Nachtschicht eingelegt, um wieder mitreden zu können. ;D Da mir die Idee mit dem Schaltregler-IC schon sehr zusagt, habe ich mir das Datenblatt von besagtem LT3741 einmal genau durchgelesen und die externen Bauteilen so weit möglich ausgelegt. Wenn ich die Funktion richtig verstanden habe, wird bei diesem IC also einfach die Ausgangsspannung auf dem eingestellten Wert für Vout gehalten und der Strom durch Verändern von Vout auf den mittels CTRL1 eingestellten Sollwert fixiert. Ich habe nun die Schaltfrequenz auf 250 kHz festgelegt, da hierfür laut Datenblatt nur eine Induktivität von 4 µH erforderlich ist. Als nächsten Wert habe ich jetzt 4,7 µH angenommen. Natürlich könnte man auch auf 500 kHz gehen und hätte dann nur noch eine 2,2 µH Induktivität. Meint ihr, ich soll erstmal bei 250 kHz bleiben? Das würde das Layout ja deutlich weniger kritisch gestalten als bei 500 kHz oder gar 1 MHz. Bei der Beschaltung von CTRL2 bin ich mir auch nicht ganz sicher. Hiermit wird der Strom unabhängig vom an CTRL1 vorgegebenen Sollwert gedrosselt (hier als Temperaturabschaltung über Spannungsteiler), sobald die Spannung an CTRL2 unterhalb der Spannung an CTRL1 liegt. Liege ich also mit der Annahme, dass es okay ist, CTRL2 einfach an die 2V-Referenz zu hängen, wenn die externe Temperaturüberwachung nicht benötigt wird? Ist der 10 kOhm-Widerstand hier überhaupt erforderlich? Und die beiden MOSFETs bedürfen auch noch etwas genauerer Betrachtung. Im Datenblatt sind einige Typen vorgeschlagen, die allerdings nur für Ausgangsspannungen zwischen 2 Volt und 4 Volt geeignet sind. Ich werde morgen mal nach geeigneten Typen suchen, sofern ihr nicht gerade zufällig wisst, was hier konkret geeignet wäre. Die Spannung an CTRL1 zur Einstellung des Stromes kann ich ja nun recht einfach mittels PWM, RC-Glied und Spannungsteiler erzeugen. Reicht das zur Ansteuerung? Viele Grüße Lukas
Angehängte Dateien:
-

Schaltplan4.png
45 KB
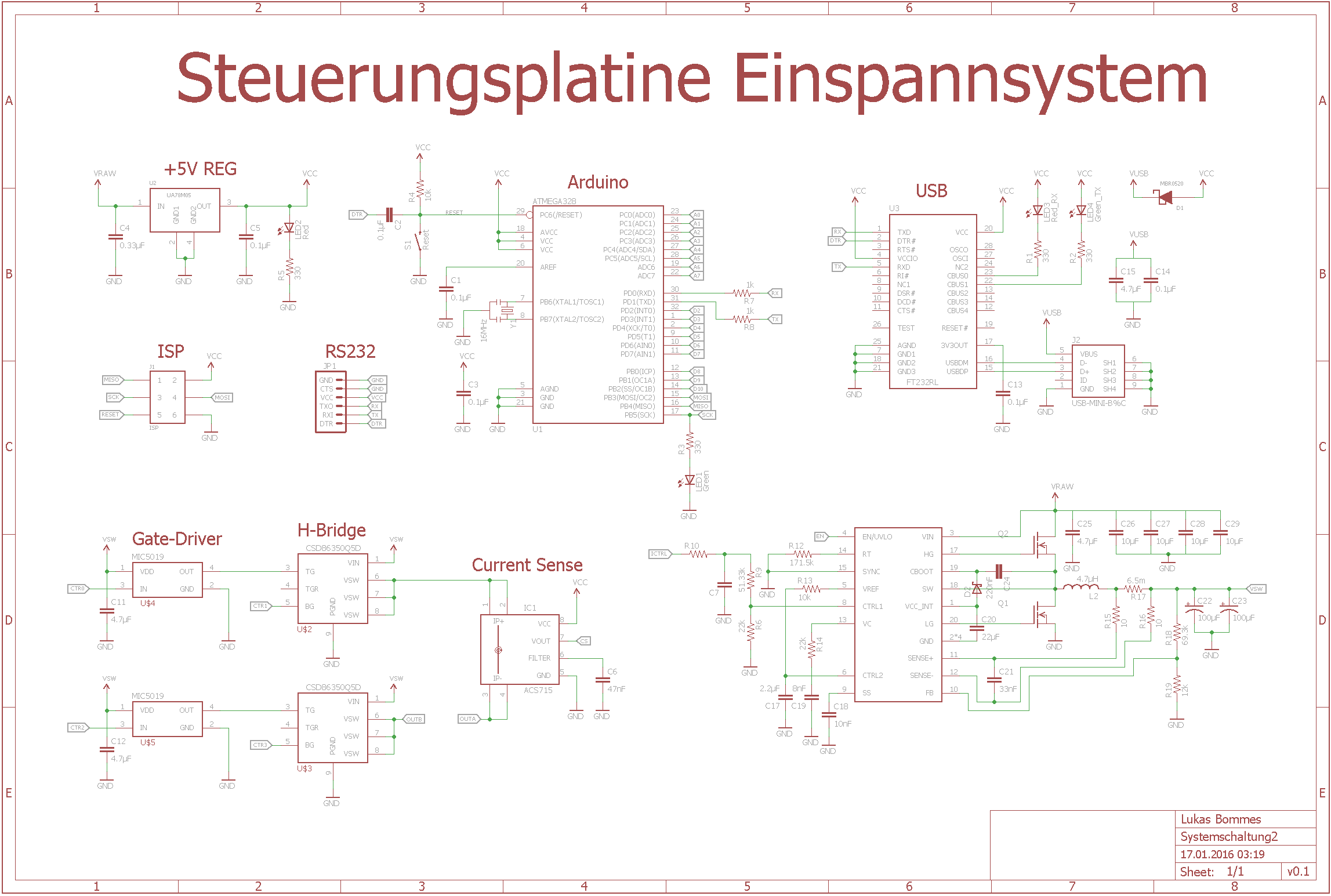
So, hier nochmal in "schön". Der ACS715 kann nun natürlich noch entfallen. Stellt sich nun lediglich die Frage, wie die Bauteile R10 und C7, sprich der RC-Filter, auszulegen sind. Weiterhin steht im Datenblatt abgesehen von der Information, dass es sich um eine Shottky-Diode handelt, nichts über die Diode D2. Habt ihr eine Idee, welcher Typ hier eingesetzt werden kann? Kann ich ebenfalls die MBR0520 aus der USB-Schaltung verwenden? Grüße Lukas
Die Diode ist relativ unkritisch. Das ist nur die Versorgung für den oberen Gatetreiber. Da sollte auch eine 1N4148 noch ausreichen. Eine kleine shottkydiode ist aber auch OK. Den Tiefpass für die PWM Filterung zur Steuerung könne man auf eine Grenzfrequenz so im Bereich 10-100 Hz auslegen - das ist immer noch schnell gegen die thermischen Zeitkonstanten. R10 sollte größer als R9 sein, so dass man noch einmal mit einem Kondensator an R6 filtern kann (falls nötig) ohne dass sich die Stufen zu stark beeinflussen. Also etwa 10 K für R10 und 0.2-1 µF für C7. ggf. müsste man R9 noch etwas reduzieren, denn für die Gleichspannung liegt R10 in Reihe zu R9. Ich hätte auch ein paar Elkos am Eingang des Reglers erwartet. Am Ausgang wäre ggf. auch ein keramischer Kondensator dazu nicht schlecht. 250 kHz klingt schon mal deutlich besser als 1-2 MHz. Die Ansteuerung der Bücke für die Umpolung müsste man sich ggf. noch mal ansehen, dass da bei kleinen Spannungen das Gate an der low side genug spannung bekommt und bei hohen Spannungen die Spannung ggf. nicht zu hoch wird. Die Diode an VUSB sieht falsch herum aus - ggf. braucht man die auch gar micht, weil das Gerät ohne externe Versorung ggf. sowieso nicht geht. Auch beim Regler für die 5 V müsste man sehen das der dann mit Fremdversorgung klar kommt (ggf. einfach eine diode am Ausgang des Reglers und dann halt mit ca. 4.6 V am µC).
Lukas B. schrieb: > Im Datenblatt sind einige Typen vorgeschlagen, die allerdings nur für > Ausgangsspannungen zwischen 2 Volt und 4 Volt geeignet sind. anhand welcher Daten ziehst Du diesen Schluss? Kann ich nicht nachvollziehen!
Hallo Lurchi, Hallo Thomas, @Lurchi: Wunderbar, danke für die Hinweise. Dann werde ich das RC-Filter heute abend mal auslegen. Die Gate-Source-Spannung des Low-Side FETs an der Umpolbrücke liegt doch im geschalteten Zustand bei 5 Volt. Reicht das nicht aus, um den FET komplett durchzuschalten? Würdet ihr die Gate-Treiber übrigens eher an Vraw anstelle von Vsw anschließen? In erstem Fall, läge ja dann die Gate-Source-Spannung etwa 4 V über der Source-Spannung (8,2 Volt bei maximalen Strom durchs Peltier-Element), in zweitem Fall hätte man unabhägig von der Ausgangsspannung des Schaltreglers Vsw etwa 7,8 V zwischen Gate und Source anliegen. Da müsste ja der RDs_on noch geringer sein. Die Diode war übrigens tatsächlich falsch herum. Was die Eingangs- und Ausgangskondensatoren anbelangt, habe ich mich an das Datenblatt gehalten. C26...C29 sollen dabei einen Rippel-Strom von etwa 4,25 Ampere aushalten, d.h. Elkos wären da schon wieder problematisch. Und im Datenblatt ist von einem Keramik-Kondensator am Ausgang nirgendwo die Rede. Welchen Wert würdest du denn hier nehmen? 100 nF? Und um den Rückfluss in den 5V-Spannungsregler zu verhindern, kann ich natürlich noch eine Diode einsetzen. Dort sollte die MBR0520 ebenfalls ausreichen (Imax = 500 mA) und mit 0,35 Volt (bei 500 mA und 25 °C) ist der Spannungsabfall auch nicht so hoch. @Thomas: Danke für den Wink mit dem Zaunpfahl. :D Ich fürchte, dass mich das Datenblatt dort etwas in die Irre geführt hat. Die aufgeführten Typen können natürlich mit deutlich höheren Spannungen umgehen. Ich habe mich jetzt folglich erst einmal für den FDM8680 (https://www.fairchildsemi.com/datasheets/FD/FDMS8680.pdf) als High-Side FET und den FDMS8672AS (https://www.fairchildsemi.com/datasheets/FD/FDMS8672AS.pdf) als Low-Side FET entschieden, die auch beide im Datenblatt vorgeschlagen werden. Euch noch einen schönen Nachmittag! Grüße Lukas
Würdet ihr im Übrigen für die beiden Spannungsteiler am Controller-IC Trimmer verwenden? Beispielsweise so etwas hier: http://www.bourns.com/docs/Product-Datasheets/3250.pdf? Denn es ist ja schon entscheidend, dass die Widerstandswerte genau passen, sodass beispielsweise an CTRL1 auch wirklich 1,5 Volt anliegen, denn andernfalls wird am Ausgang ja niemals der eingestellte Maximalstrom erreicht.
Lukas B. schrieb: > Würdet ihr im Übrigen für die beiden Spannungsteiler am Controller-IC > Trimmer verwenden? Eher nicht. Wozu denn? Ich dachte bislang immer, ein Peltier-Element ist eine simple Aufeinanderschichtung von verschiedenen Metallen, und ich kann mir kaum vorstellen, daß es da besonders kritisch ist, wenn mal für ein paar Sekunden wegen einer Fehlfunktion der Software o.ä. ein halbes Volt zu hohe Spannung anliegt oder ein halbes A zu hoher Strom fließt. Also glaube ich kaum, daß es viel Sinn macht, solche Grenzwerte auf das mV oder mA genau justierbar zu machen. Übliche Widerstände haben 1% Toleranz, damit sollten sich die gewünschten Grenzwerte schon ausreichen genau per Festwiderstände einstellen lassen.
Auf trimmer würde ich auch eher verzichten. Die sind vergleichsweise groß und Fehleranfällig. Beim Spannungsteiler kann man eigentlich den Wert genau genug einstellen. Die Strombegrenzung sollte so wie ich es sehen sowieso nur für das hochfahren wirken, also den Schaltwandler da schützen. Den Strom relativ genau zu begrenzen macht schon Sinn, weil drüber nicht stäärker gekühlt wird. Wenn man nicht die voll Leistung braucht, ist der Grenzwert für den Strom aber nicht so kritisch. Der Abwärtswandler hat den größeren Rippelstrom auf der Eingangsseite. Mit nur den kleinen Kondensatoren wie im Datenblatt hätte man relativ viel Rippel am Eingang und bräuche da entsprechend dann ggf. einen Filter um Grenzwerte einzuhalten. Es scheint irgendwie eine Unart in den Datenblättern zu sein da so kleine Kondensatoren zu wählen. Am Ausgang würde ich schon 1 µF als Kondensator wählen - die sind auch noch nicht so groß von der Bauform und helfen halt durch weniger ESL HF Störungen zu reduzieren, wo die Elkos ggf. nicht mehr wirken.
Angehängte Dateien:
-

Schaltung.png
52 KB
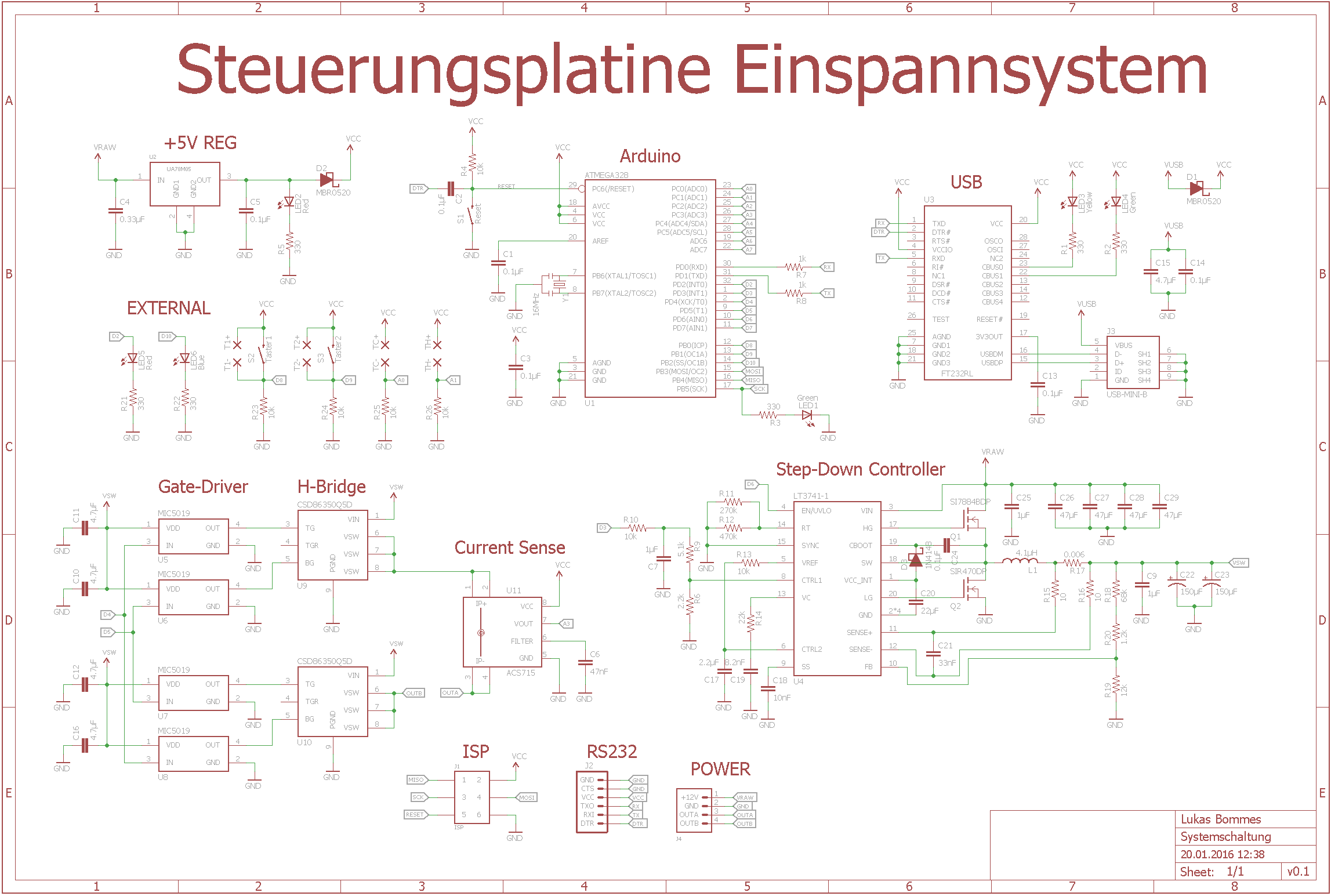
Hallo Thomas, Hallo Lurchi, ich habe mal die aktuelle Version des Schaltplans angehängt. Viel hat sich nicht mehr geändert, außer, dass ich nochmal alle Bauteilwerte am Stromregler kontrolliert, eine Stückliste erstellt, die Bauteile bei Digikey zusammengesucht und Ladungspumpen an die Low-Side-FETs angefügt habe. Allerdings überlege ich gerade, ob ich nicht die gesamte H-Brücken-Schaltung, die ja doch sehr "zusammengeschustert" ist, einfach durch ein BTM7752G (http://www.infineon.com/dgdl/Infineon-BTM7752G-DS-v02_00-en.pdf?folderId=db3a3043156fd5730116144c5d101c30&fileId=db3a30432e1525b3012e24c6ed042357&ack=t) ersetzen soll. An sich erscheint mir das die eleganteste und platzsparendste Lösung zu sein. Allerdings stört mich der hohe RDs_on des ICs etwas, der mit 150 mOhm ja nicht gerade niedrig ist. Der VNH3SP30 liegt mit 50 mOhm wesentlich darunter, kann aber wenn ich das richtig verstehe auch nur mit PWM und nicht mit einem konstanten Logik-Signal angesteuert werden. Aber das ließe sich ja durch korrekte Einstellung des Reglers kompensieren. Ich habe allerdings nochmal eine Frage zu dem Regler-IC (LT3741-1). Denn ich habe das Datenblatt jetzt schon dreimal gelesen und werde noch immer nicht ganz schlau aus der genauen Funktionsweise. Und zwar stellt man ja sowohl einen Sollwert für den Strom als auch einen Sollwert für die Spannung am Ausgang ein. Wird denn nun der Strom konstant gehalten oder die Spannung? Denn beides unabhängig voneinander geht ja nicht, da sie über den Widerstand der Last gekoppelt sind. D.h. wenn ich jetzt z.B. Vout = 8,2 V und Iout = 8,5 A über die externen Bauteile festlege, wird dann (z.B. bedingt durch den Spannungsabfall an der H-Brücke) die Spannung soweit angehoben, dass wieder Iout = 8,5 A fließt? Oder kann man Vout als eine Obergrenze für die Spannung verstehen? D.h. müsste ich z.B. Vout = 9,475 V und Iout = 8,5 A einstellen, um sicherzustellen, dass auch trotz des Spannungsabfalls an der H-Brücke (1,275 V) die 8,5 A eingestellt werden können? Viele Grüße Lukas
Hallo Lukas, Lukas B. schrieb: > Allerdings überlege ich gerade, ob ich nicht die gesamte > H-Brücken-Schaltung, die ja doch sehr "zusammengeschustert" ist, einfach > durch ein BTM7752G ersetzen soll. das größte Problem dabei ist wohl, daß die Brücke nicht mit Versorgungsspannung (=12V) betrieben wird, sondern die ggf. nur sehr kleine Betriebsspannung des Peltierelements schalten soll. Lukas B. schrieb: > Ich habe allerdings nochmal eine Frage zu dem Regler-IC (LT3741-1)... Ohne mich jetzt intensiv mit diesem Controller beschäftigt zu haben, vermute ich jetzt einfach mal, daß (so ähnlich wie bei einem Labornetzteil mit Strombegrenzung) immer nur entweder Strom oder Spannung geregelt wird, je nachdem, welcher der beiden Werte unter dem eingestellten Limit liegt. Gruß, Thomas
Hallo Thomas, das scheint mir tatsächlich ein großes Problem zu sein. Im Datenblatt des BTM7752G steht zwar, dass Vcc zwischen -0.3 V und 45 V liegen darf, allerdings habe ich gesehen, dass der maximale kontinuierliche Strom nur 4 A beträgt, womit dieses IC ohnehin nicht geeignet ist. Ich habe gestern noch alles auf einen VNH3SP30 umgebaut, dann aber festgestellt, dass dieser eine Abschaltfunktion besitzt, die auslöst, wenn Vcc unter 5.5 V fällt (obwohl im Datenblatt für Vcc wieder eine Spannung von -0.3 V bis 30 V angegeben ist). Daher werde ich jetzt vermutlich doch wieder alles diskret aufbauen, allerdings wie anfangs von dir vorgeschlagen mit diskreten MOSFETs und ohne die teuren Ladungspumpen. Ich dachte an eine Schaltung dieser Art: http://www.homofaciens.de/technics-base-circuits-h-bridge_ge_navioff.htm (Abbildung 22) Allerdings stellt sich nun die Frage, wie man die Schaltung modifizieren muss, damit sie auch mit Versorgungsspannungen unterhalb von 4.5 Volt klarkommt. Bei z.B. Vcc = 1.5 V beträgt die Gate-Source-Spannung am P-Kanal-MOSFET ja auch nur noch -1.5 V, was aber zum Durchschalten nicht mehr ausreicht. D.h. ich müsste zum Schalten irgendwie die Vraw-Spannung (12 V) nutzen und zwischen Source und Drain entsprechend die Ausgangsspannung des Stromreglers zwischen 0 V und 8,2 V schalten. Hast du zufällig eine Idee, wie man das Problem lösen könnnte? Viele Grüße Lukas
Für die extra H-Brücke zum Umpolen passt die Brücke aus 4 N-Kanal MOSFETs schon, denn eine Hilfsspannung wird man so oder so brauchen. Die Brücke aus N und P Kanal MOSFETs bräuchte halt eine negative Hilfsspannung für die P-kanal MOSFETs, wenn die Spannung klein ist. Dann kann man auch gleich die positive Hilfsspannung wählen. Man könnte ggf. eine andere ggf. günstiger Ladungspumpe wählen. Es wird ja nur langsam geschaltet - da könnte man schon fast auf die Idee konnen einen RS232 Chips wie max232 zu missbrauchen. Die wirklich konsequente Lösung wäre halt die Vollbrücke. Die Ansteuerung vom µC aus oder gleich ein spezielles IC für Peltierelemente oder ggf. 2 Regler ICs von denen entweder das eine oder das andere aktiv ist. Ggf. könnte man auch einen Klasse D Audioverstärker nutzen - da sind aber ggf. die Schaltefrequenzen eher hoch und die Auslegung eher für höhere Lastwiderstände. Bei den Spannungen für die Brücken muss man sich an den Spannungen für eine Funktion orienetieren, nicht an den absolute maximum ratings. Damit die Brücke schaltet braucht es halt etwa 5 V - bei -0.3 V geht nur noch nichts kaputt.
Angehängte Dateien:
-

Schaltplan.png
51 KB
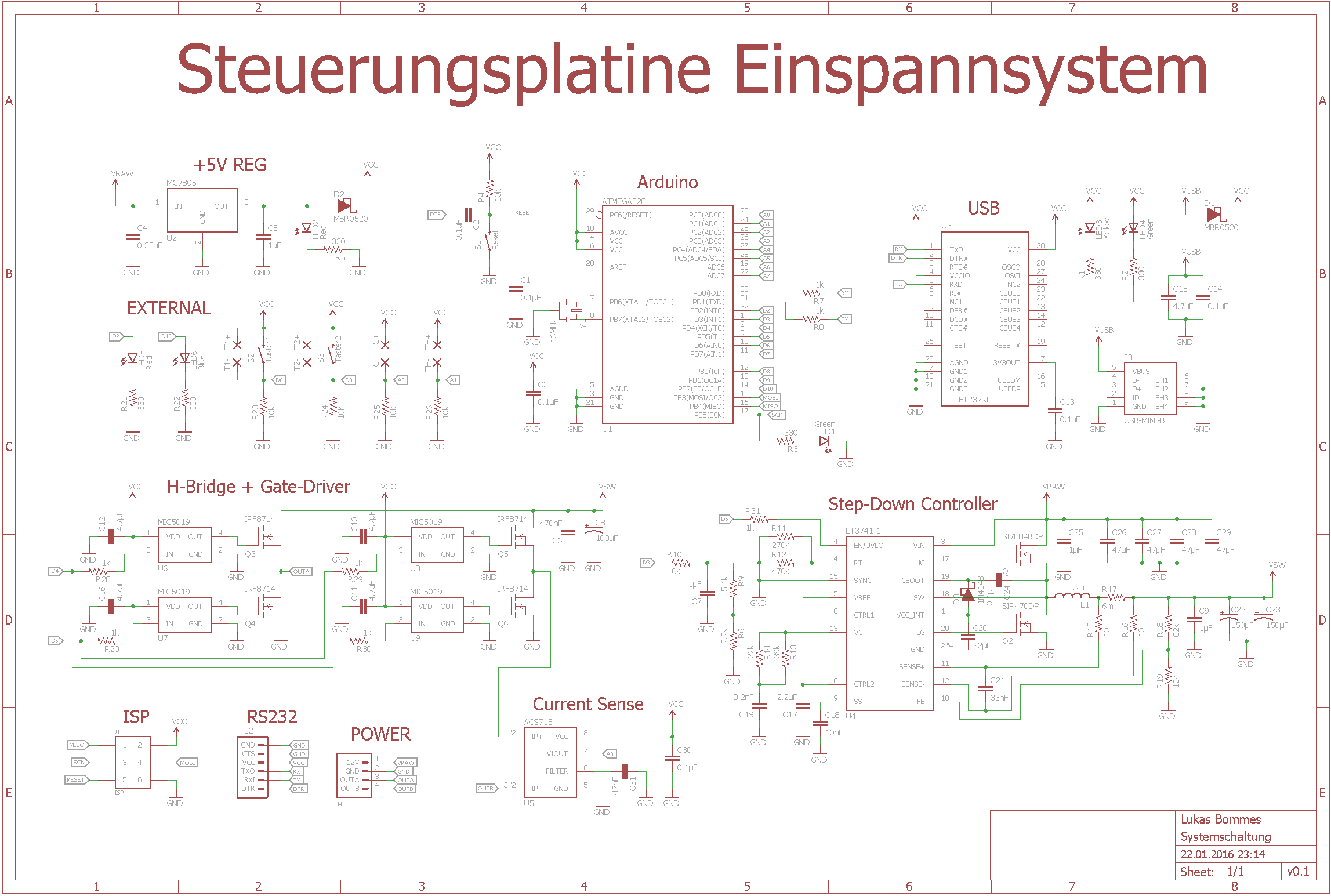
Hallo Lurchi, nach stundenlangem Durchstöbern von Datenblättern bin ich nun zu dem Schluss gekommen, dass die ursprüngliche Idee des diskreten Aufbaus mit Ladungspumpen doch gar nicht so schlecht war. Ich hatte sie zuvor lediglich etwas ungünstig angeschlossen (VDD auf die Ausgangsspannung des Reglers, macht natürlich keinen Sinn, nun liegt VDD auf +5 V und Vout auf +16 V, was in jedem Fall reicht, um die FETs durchzuschalten). Demnächst werde ich noch die restlichen Packages erstellen und die Bauteile des Reglers auf die neue Ausgangsspannung entsprechend des RDs_on der neuen H-Brücke anpassen. Meine Frage von oben hat sich übrigens auch halbwegs geklärt. Und zwar scheint man über die Spannung an CTRL1 des Regler-IC zwar den Strom begrenzen zu können. Konstant gehalten wird aber die Spannung, der eingestellte Strom scheint nur eine Obergrenze zu sein. Bei Regelung der Spannung wird aber an der ohmschen Last natürlich auch der Strom direkt mitgeregelt, von daher macht es ja eigentlich keinen großen Unterschied. Diese Vermutungen werde ich aber, wenn der Aufbau läuft, nochmal experimentell validieren. Das wird jetzt allerdings ein paar Wochen dauern, dank besagter Klausuren. Falls ihr irgendwann mal zufällig nach Braunschweig kommen solltet, meldet euch ruhig mal, dann gebe ich eine Runde Bier für die ganzen hilfreichen Ratschläge aus! ;D Schönen Abend noch! Viele Grüße Lukas P.S. Da du gerade ein IC speziell für Peltier-Elemente erwähnt hast, musste ich mit Erschrecken feststellen, dass es so etwas tatsächlich schon gibt: https://www.maximintegrated.com/en/products/power/switching-regulators/MAX1968.html#popuppdf Allerdings liefert dieses IC nicht die benötigten 8,2 V Ausgangsspannung, sondern nur 4,3 V. Allerdings habe ich jetzt auch keine Lust, alles noch einmal neu zu entwickeln. Die momentane Lösung ist ja, wenn sie denn funktioniert, schon recht elegant und erfüllt sämtliche Anforderungen der Spezifikation.
Lukas B. schrieb: > Bei Regelung der Spannung wird aber an der ohmschen > Last natürlich auch der Strom direkt mitgeregelt, von daher macht es ja > eigentlich keinen großen Unterschied. Diese Vermutungen werde ich aber, > wenn der Aufbau läuft, nochmal experimentell validieren. Es scheint mir eh vernünftiger zu sein, dem Buck-Konverter über den µC eine Sollspannung vorzugeben, als den Strom. Eine Last-Strommessung hast Du ja auch schon drin, und diese ist wahrscheinlich viel genauer, als die Strombegrenzung des Konverters. Von den vier Ladungspumpen in der Brücke kannst Du vermutlich auch noch zwei einsparen, da sie ja sowieso am Eingang zusammengeschaltet sind und die gleiche Spannung ausgeben. Die Gates der Transistoren sind ja im statischen Betrieb keine Belastung. Lukas B. schrieb: > Falls ihr irgendwann mal zufällig nach Braunschweig kommen solltet, > meldet euch ruhig mal, dann gebe ich eine Runde Bier für die ganzen > hilfreichen Ratschläge aus! ;D Schönen Gruß nach BS! Da habe ich auch mal studiert ;) Gruß, Thomas
Die unteren MOSFETs der Brücke brauchen keine extra Ladungspumpen. Da reichen auf 5-10 V für ansteuerung, denn die sind mit Source fest an GND und ggf. nur ein kleiner Shunt dazwischen. Wenn es sei müsste könnte man sich ggf. die höhere Spannung auch vom Buck Regler abzweigen - die Erzeugt per Bootstrapping ja schon eine Spannung von etwa 6 V über der Ausgangsspannung. Es bleiben dann aber die Schalter für die höhere Spannung.
Angehängte Dateien:
-

top.PNG
7,8 KB -

bottom.PNG
6,6 KB
{kind=link}
{kind=link}
Hallo Thomas, Hallo Lurchi, verzeiht die lange Verzögerung, aber ich bin ich den letzten Tagen aufgrund der Klausuren kaum dazu gekommen, noch etwas an der Schaltung zu machen. Ich habe nun lediglich zwei Ladungspumpen verwendet und an die Ausgänge jeweils zwei MOSFETs gehängt. Thomas, du hast natürlich vollkommen Recht, dass es in dem Betriebszustand keinen großen Unterschied macht, wie viele Gates an einem Treiber hängen. Theoretisch müsste sich ja nur die Aufladezeit etwas verlängern, aber das ist hier unerheblich. Weiterhin habe ich testweise schon einmal mit dem Layout begonnen. Momentan bin ich etwas in Sorge, dass die Leitungen noch etwas zu dünn für die hohen Ströme sein könnten. Ich habe bereits mit Polygonen anstelle von Leiterbahnen gearbeitet, um möglichst große leitende Flächen zu schaffen, aber wirklich groß sind die immer noch nicht. Aber dafür kann man auf diese Weise ein recht kompaktes Layout schaffen. Der Bildausschnitt entspricht etwa 2 cm x 3 cm Leiterbahnfläche. Sprich, es lassen sich vermutlich fast alle Bauteile des Schaltreglers und der H-Brücke auf der Oberseite platzieren, sodass man sich in den hoch belasteten Bereichen Durchkontaktierungen sparen kann. AtMega, FT232RL und Spannungsregler werden voraussichtlich auf die Unterseite verfrachtet. Lurchi, ich habe die Gates der unteren MOSFETs ebenfalls an die Ladungspumpe angeschlossen, da so der RDs_on noch einmal etwas geringer ist. Da die Treiber ja ohnehin vorhanden sind, kann man diesen Vorteil denke ich durchaus ausnutzen. Das mit dem Bootstrapping ist natürlich auch eine Idee, aber die Lösung mit den Treibern scheint mir jetzt einfacher und zuverlässiger (hinsichtlich der Auslegung). Euch noch einen schönen Abend! Viele Grüße Lukas @Thomas: Ich werde Grüße ausrichten. ;D Was hast du denn studiert? E-Technik oder auch Maschinenbau?
Lukas B. schrieb: > Was hast du denn studiert? E-Technik, Richtung Daten/Digitaltechnik - ist aber schon 'ne Weile her. An der Uni standen seinerzeit aber bereits hochmoderne Commodore CBM80xx- Rechner, die RAM-Ausstattung eines üblichen Heimcomputers lag im 2-stelligen Kilobyte-Bereich und meine erste 5 1/4 Zoll Festplatte hatte immerhin schon 20 Megabyte ;)
Bitte melde dich an um einen Beitrag zu schreiben. Anmeldung ist kostenlos und dauert nur eine Minute.
Bestehender Account
Schon ein Account bei Google/GoogleMail? Keine Anmeldung erforderlich!
Mit Google-Account einloggen
Mit Google-Account einloggen
Noch kein Account? Hier anmelden.