Hallo Forum,
ich verzweifle an den Bosch BMA020 welche ich gerne mit meinem STM32F446
auslesen möchte. Takt ist da, nur ich bekomme im DR-Register stets ein
0xFF. So bin ich vorgegangen:
Ich habe eine bma020.h Datei erzeugt. Dort ist folgendes definiert
(Auszug):
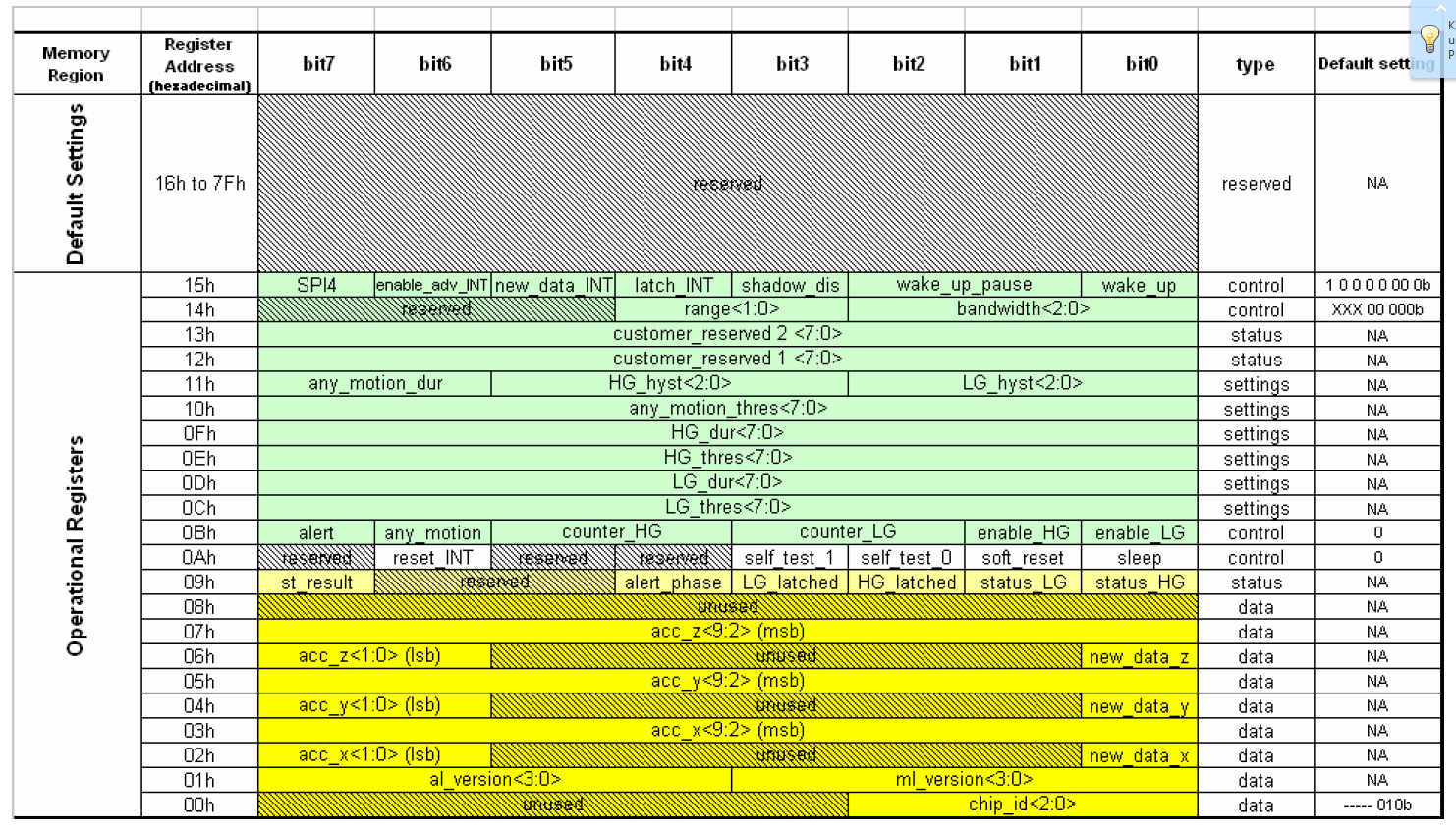
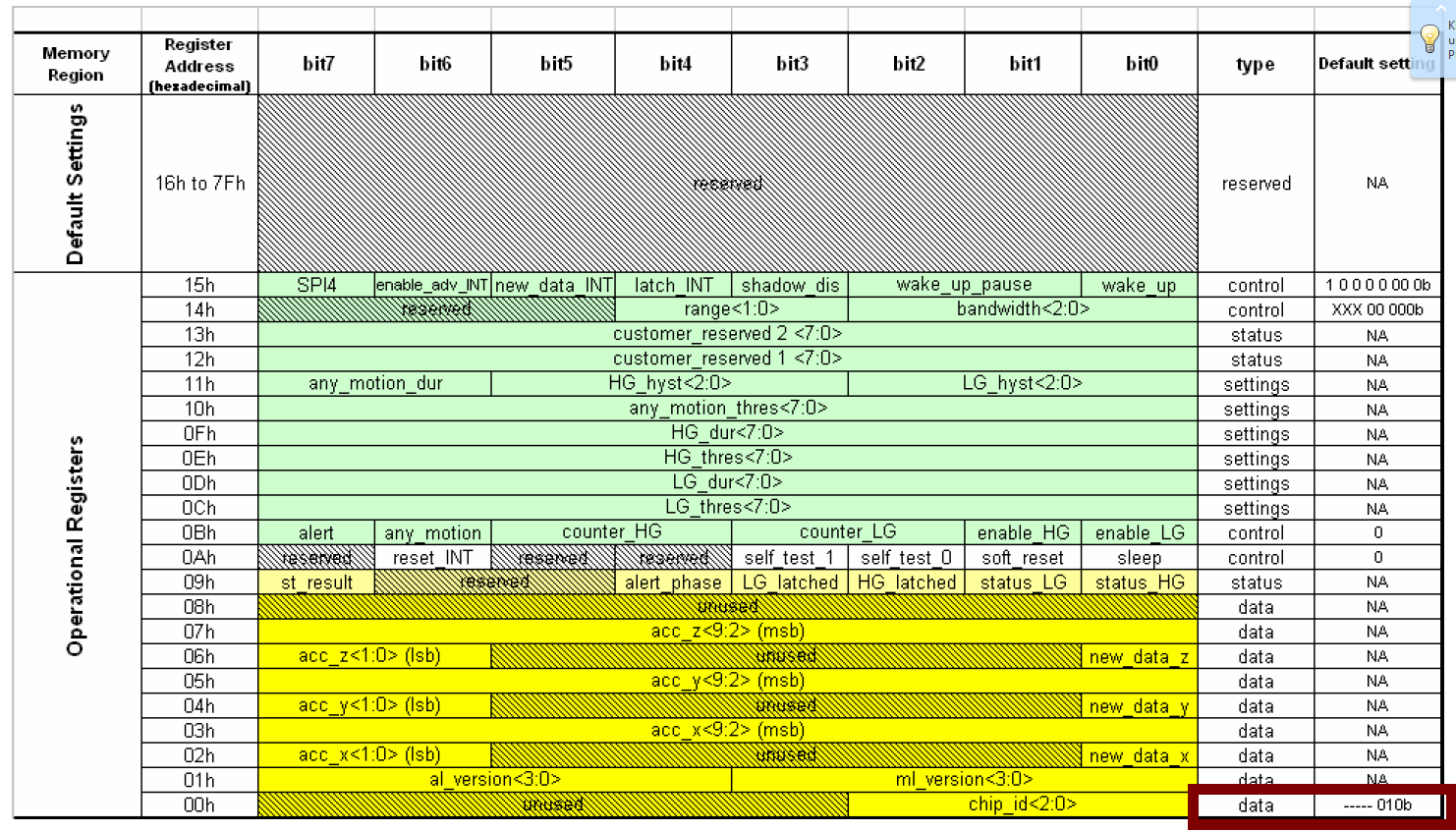
Nun sagt das Datenblatt, wenn man nur die Werte aus 0x03, 0x05, 0x07
auslesen möchte, also nur die Werte in x,z und z-Richtung muss ein
Shadowbit in 0x14 gesetzt werden. Die anderen Bits geben die Bandbreite
und die Empfindlichkeit ebenfalls im Register 0x14 an. Des Weiteren
meine ich gelesen zu haben das man zum Empfangen der Daten ein 0x00
mitsenden muss. Zudem meine ich, das Senden NSS=LOW und Empfangen
NSS=HIGH ist.
Also ist meine Configroutine in bma020.c:
1
voidbma020_CONFIG(void)
2
{
3
BMA020_NSS_LOW;
4
bma020_SEND(RANGE_2g);
5
bma020_SEND(BANDWIDTH_1500hz);
6
bma020_SEND(ONLY_MSB_VALUE);
7
BMA020_NSS_HIGH;
8
}
Nun habe ich noch eine Funktion, welche mir die Beschleunigungswerte aus
dem Register auslesen und testweise auf eine USART schreiben soll.
Hi,
also ohne das Datenblatt groß angeschaut zu haben: Um mit dem SPI Daten
empfangen zu können, musst du was drauf schreiben, schließlich bist du
der SPI Master und nur der hat die Gewalt über die Taktleitung. Siehe
Figure 5. du musst also um ein Byte zu empfangen, zwei Byte senden (die
Adresse, RW Bit und das Dummy Byte). Das machst du schon mal falsch.
Daniel V. schrieb:> Zudem meine ich, das Senden NSS=LOW und Empfangen> NSS=HIGH ist.
NEIN! NSS ist der ChipSelect, du setzt bei demjenigen Slave NSS auf Low
mit dem du kommunizieren willst, also Senden und Empfangen. Wenn ein
Slave auf seinem NSS einen High Pegel hat, muss er nach SPI "Standard"
die Schnauze halten.
Da du das Prinzip von SPI noch nicht richtig verstanden hast, solltest
du dich damit vertraut machen und vor allem das Datenblatt vom BMA020
mal ordentlich durchlesen!
TriHexagon schrieb:> NEIN! NSS ist der ChipSelect, du setzt bei demjenigen Slave NSS auf Low> mit dem du kommunizieren willst, also Senden und Empfangen. Wenn ein> Slave auf seinem NSS einen High Pegel hat, muss er nach SPI "Standard"> die Schnauze halten.
Ich seh gerade, ist kompletter Unsinn was ich geschrieben habe. Die
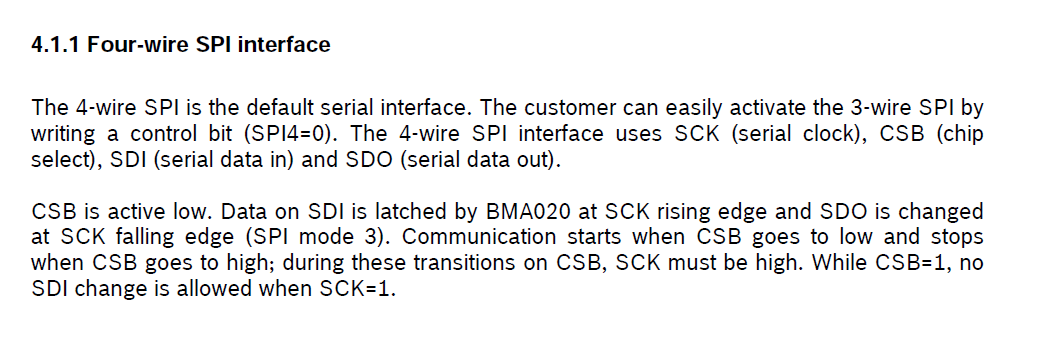
Datenübertragung findet bei NSS Low statt. Datenblatt Figure 4, Seite
24ff. Das wollte ich damit sagen. Der Pegel ist normalerweise HIGH. das
heißt der Chip wird gerade vom µC (Master) nicht angesprochen
TriHexagon schrieb:> Siehe> Figure 5. du musst also um ein Byte zu empfangen, zwei Byte senden (die> Adresse, RW Bit und das Dummy Byte). Das machst du schon mal falsch.
Ahh, d.h. ich muss ihm erst eine 1 senden, oder?
Datenblatt Seite 26, Figure 7 also 0b10000011 für 0x03?
Danke und Gruß
Daniel
Daniel V. schrieb:> TriHexagon schrieb:>> NEIN! NSS ist der ChipSelect, du setzt bei demjenigen Slave NSS auf Low>> mit dem du kommunizieren willst, also Senden und Empfangen. Wenn ein>> Slave auf seinem NSS einen High Pegel hat, muss er nach SPI "Standard">> die Schnauze halten.>> Ich seh gerade, ist kompletter Unsinn was ich geschrieben habe. Die> Datenübertragung findet bei NSS Low statt. Datenblatt Figure 4, Seite> 24ff. Das wollte ich damit sagen. Der Pegel ist normalerweise HIGH. das> heißt der Chip wird gerade vom µC (Master) nicht angesprochen
Genau, NSS ist "active low".
Daniel V. schrieb:> TriHexagon schrieb:>> Siehe>> Figure 5. du musst also um ein Byte zu empfangen, zwei Byte senden (die>> Adresse, RW Bit und das Dummy Byte). Das machst du schon mal falsch.>> Ahh, d.h. ich muss ihm erst eine 1 senden, oder?> Datenblatt Seite 26, Figure 7 also 0b10000011 für 0x03?
Genau und dann das Dummy Byte, damit der Sensor die Daten auf den Bus
legen kann.
TriHexagon schrieb:> Genau und dann das Dummy Byte, damit der Sensor die Daten auf den Bus> legen kann.
Es funktioniert leider nicht :(
Mein derzeitiger Code:
bma020.h
/*Sende an BMA020 die Konfigutationseinstellungen*********/
2
3
voidbma020_CONFIG(void)
4
{
5
BMA020_NSS_LOW;
6
bma020_SEND(0x00|RANGE_2g);
7
bma020_SEND(0x00|BANDWIDTH_1500hz);
8
bma020_SEND(0x00|ONLY_MSB_VALUE);
9
BMA020_NSS_HIGH;
10
}
11
12
13
voidbma020_READ(void)
14
{
15
BMA020_NSS_LOW;
16
bma020_SEND(0x01|X_AXIS|0x00);/* 0x01|0x02|0x00*/
17
bma020_temp_data=bma020_SEND(0x01|X_AXIS|0x00);
18
BMA020_NSS_HIGH;
19
20
USART_SendData(USART3,bma020_temp_data);
21
while(!(USART3->SR&USART_FLAG_TC));
22
}
main.c
1
#include<functions.h>
2
#include<usart.h>
3
#include<bma020.h>
4
5
6
/*Bibliotheken*/
7
8
intmain(void)
9
{
10
startUp();
11
USART_config();
12
bma020_STARTUP();
13
bma020_CONFIG();
14
15
while(1)
16
{
17
Run_Idle();
18
bma020_READ();
19
20
// sendText("Es tut mir leid Dave, aber das kann ich nicht tun!\n");
21
//for (x = 0; x < 200000;x++);
22
23
}
24
}
Verstehe ich nicht. Ich habe stets 0xFF im DR-Register. Pullups sind
auch gesetzt.
[Edit]: Der Sensor ist ein Bausatz von ELV. Ich habe jetzt mal einen
anderen eingesetzt und dort ist der Wert 0x01. Hab ich den Sensor von
meinem Board entfernt, so ist der Registerwert 0xFF. Daraus schließe
ich, das ein Sensor über die Wupper gegangen ist (ich hatte den mal
verpolt)
Sorry habe den Thread aus den Augen verloren und nicht mehr gefunden.
Irgendwas ist da faul, ist mit dem SPI Enable die NSS Leitung gemeint?
Wenn ja läuft da etwas schief, NSS muss vor dem ersten Takt auf Low und
erst nach dem letzten Takt (also nach dem 16 Bit) auf High. So wie das
aussieht geschieht das aber nicht. Du kannst im Saleae Logic auch einen
SPI Decoder setzen, dann siehst du genau was da übertragen wird.
TriHexagon schrieb:> Sorry habe den Thread aus den Augen verloren und nicht mehr> gefunden.> Irgendwas ist da faul, ist mit dem SPI Enable die NSS Leitung gemeint?> Wenn ja läuft da etwas schief, NSS muss vor dem ersten Takt auf Low und> erst nach dem letzten Takt (also nach dem 16 Bit) auf High. So wie das> aussieht geschieht das aber nicht. Du kannst im Saleae Logic auch einen> SPI Decoder setzen, dann siehst du genau was da übertragen wird.
Hi TriHexagon,
bisher habe ich folgende Erkenntnisse:
Von diesen BMA020-Sensoren waren zwei defekt, ich hatte die mal verpolt
angeschlossen, da ich aus Faulheit an meinem Board keine
Aufstecksicherung vorgesehen habe. Ich habe den ENABLE-PIN-Stift
weggelötet und den dazugehörigen Weibchen zugeklebt. Ein Sensor wurde
extrem heiß (IR-Kamera zeigte 100 °C) und nahm 0,2 A Strom auf. Der
andere rührte sich gar nicht. Daher die Registerwerte 0xFF.
Anschießend bin ich nochmals Schritt für Schritt das Datenblatt
durchgegangen und folgende SPI-Einstellungen habe ich implementiert:
* SPI-Takt auf 5 MHz gesetzt (Der APB2-Takt ist 80 MHz=Systemtakt)
* Datenkommunikation auf NSS=LOW
* Clockphase auf HIGH (fallende Flanke des Clocks)
* Clockpolaritöt auf HIGH
Dies entspricht SPI-Mode 3
* Vollduplex aktiviert
* MSB zuerst
* der STM ist der Master
folgende Einstellungen habe ich gemacht:
1
/*****Initialisierung der SPI-Schnittstelle*************/
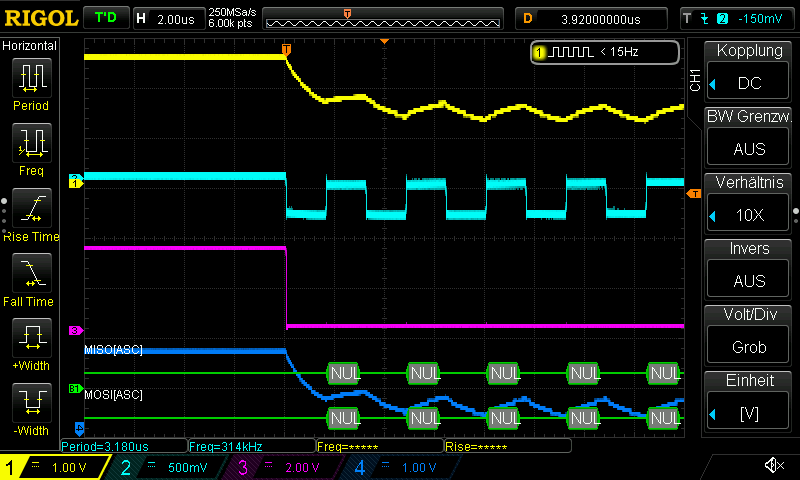
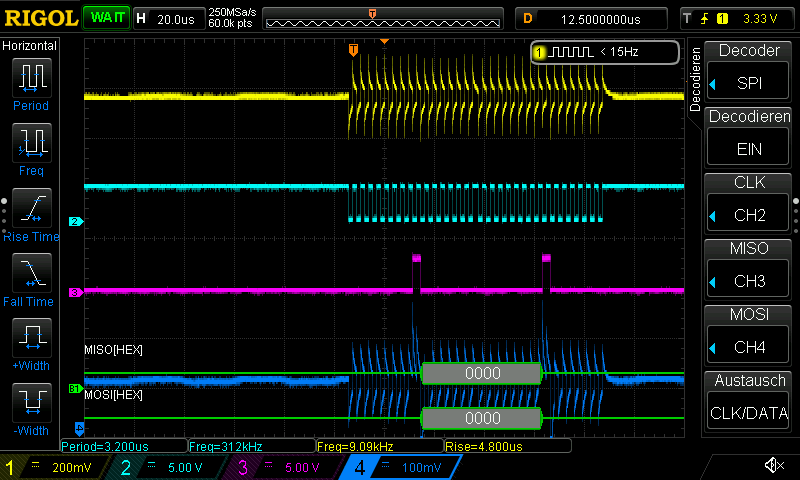
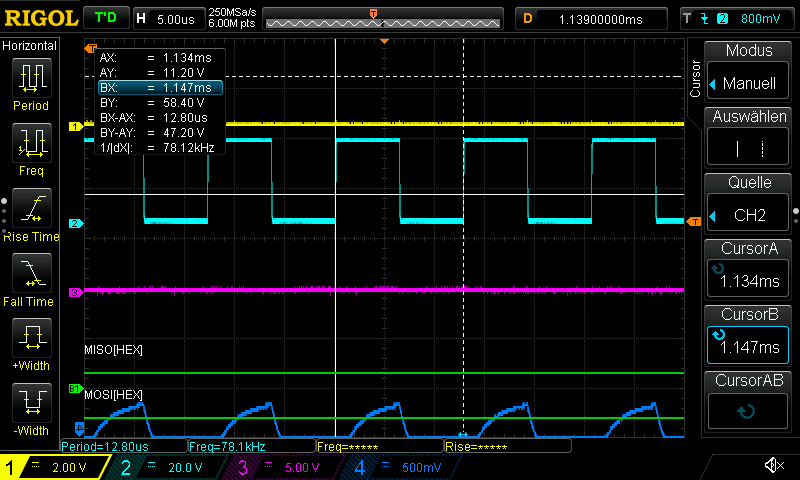
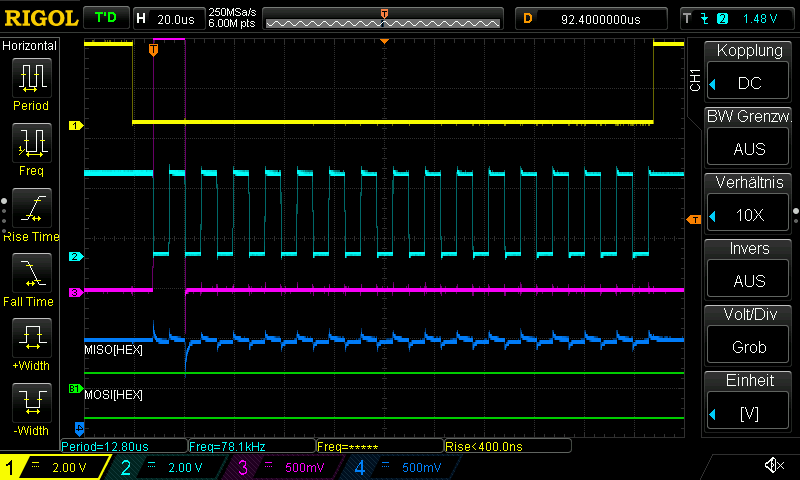
Nun habe ich mit meinem Oscar mir die SPI-Signale angeschaut. Sehr
auffällig ist dass das MOSI-Signal schon wellig ist (wie auch NSS). Auf
MISO liegen Nullzeichen. Das spricht dafür das irgendwas mit meiner
Sendesoutine oder allgemeinen Ablauf etwas nicht stimmt.
Meine Senderoutine
1
voidbma020_CONFIG(void)
2
{
3
4
BMA020_NSS_LOW
5
bma020_SEND(RANGE_4g);
6
bma020_SEND(BANDWIDTH_1500hz);
7
bma020_SEND(ONLY_MSB_VALUE);
8
BMA020_NSS_HIGH;
9
10
}
11
12
13
voidbma020_READ(void)
14
{
15
BMA020_NSS_LOW;
16
bma020_SEND(0x01|X_AXIS|0x00);
17
bma020_temp_data=bma020_SEND(0x01|X_AXIS|0x00);
18
BMA020_NSS_HIGH;
19
20
USART_SendData(USART3,bma020_temp_data);
21
while(!(USART3->SR&USART_FLAG_TC));
22
}
23
24
25
/************Initialisierung aller Funktionen************/
26
voidbma020_STARTUP(void)
27
{
28
bma020_GPIO();
29
bma020_TAKT();
30
bma020_SPI();
31
bma020_CONFIG();
32
}
In der Main ist die bma020_READ in der Schleife
Vielen Dank für Deine Hilfe :)
TriHexagon schrieb:> Versuch erst mal die ChipID auszulesen, da weißt du genau was> zurückkommen soll. Also sende 0x80 0x00, zurück kommen muss XXXXX010.
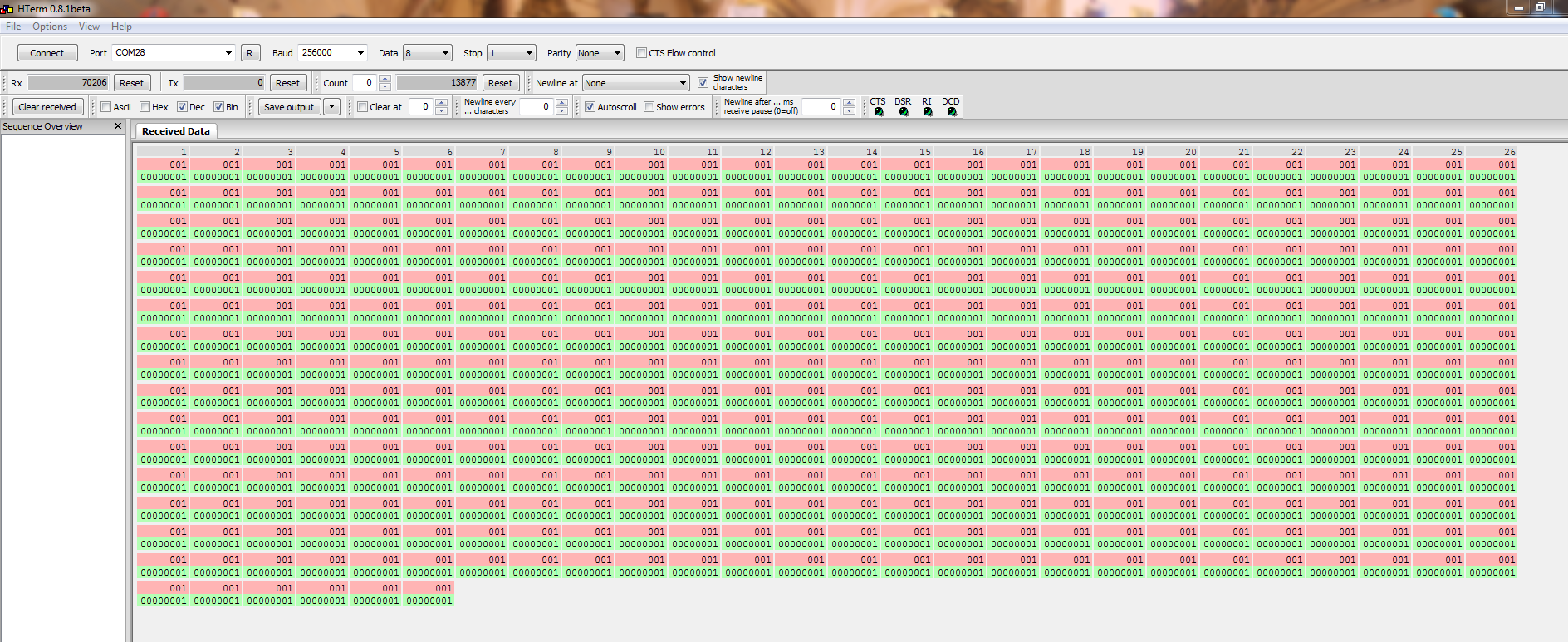
Als Antwort bekomme ich 01000000 (0x40), was ich aber auf dem Oscar
nicht sehen kann (NUL)
Auch bricht die Datenkommunikation nach einer gewissen Zeit zusammen
(speise das Board gerade mit der USB-Schnittstelle)
[EDIT] Gerade mal mein Netzteil angehangen, Schaltung zieht 0,023 A und
ich habe einen Spannungsregler LP2950 drauf der bis 1A Strom liefern
kann.
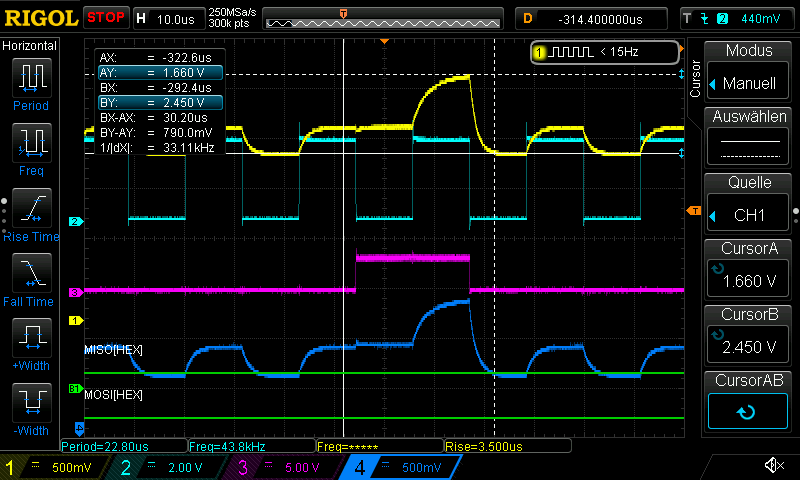
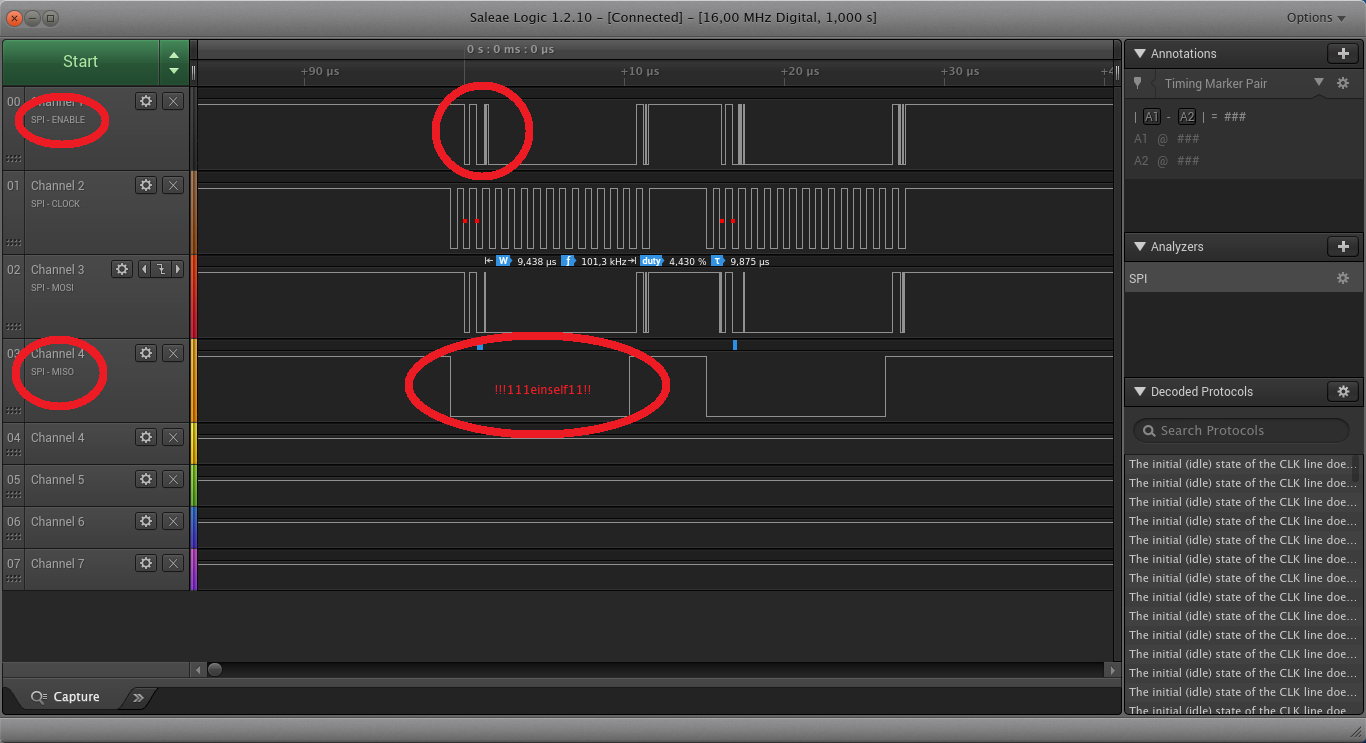
So, ich glaube ein Fehler liegt am NSS-Signal. Dieser schlägt extrem
aus, was im Logicanalyser und auch auf dem Oscar zu sehen ist. Daher
schwingt dieser zwischen LOW und HIGH und daher ist keine vernünfige
Kommunikation möglich, da der Sensor einmal angesprochen wird und wieder
nicht. Also muss dieses Signal geglättet werden. Ich frage mich nun,
warum dieses Signal so unfassbar unsauber ist...
Auch läuft das NSS-Signal und der Takt gleichzeitig los. Zudem ist das
MISO-Signal und das Taktsignal identisch... echt seltsam
Gruß
Daniel
Ja die Signale sehen überhaupt nicht gut aus, außer CLK und lila (NSS?).
Also vom Code her, sehe ich nichts was gegen eine fehlerfreie
Kommunikation sprechen würde. Irgendwas stört dein Signal. Kannst du den
SPI Bus mal ohne Sensor abgreifen?
TriHexagon schrieb:> Ja die Signale sehen überhaupt nicht gut aus, außer CLK und lila> (NSS?).> Also vom Code her, sehe ich nichts was gegen eine fehlerfreie> Kommunikation sprechen würde. Irgendwas stört dein Signal. Kannst du den> SPI Bus mal ohne Sensor abgreifen?
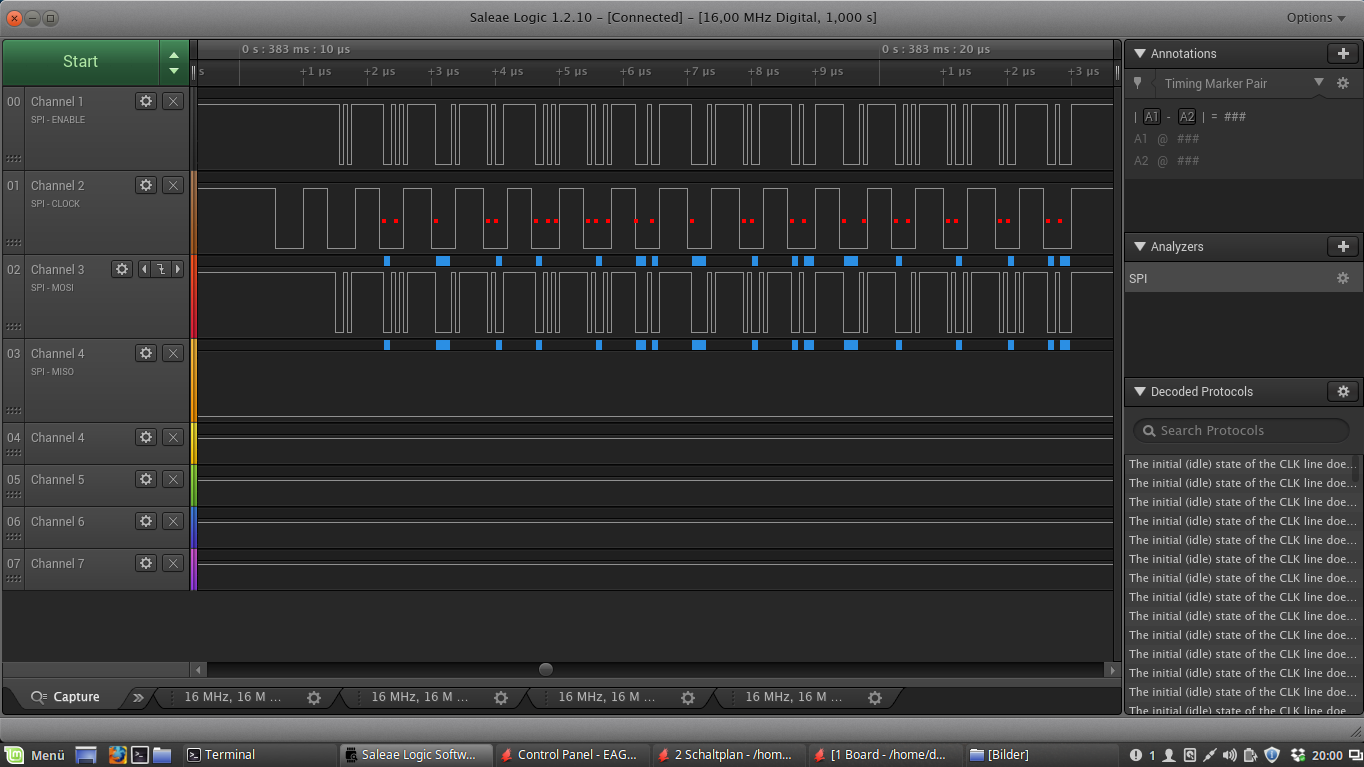
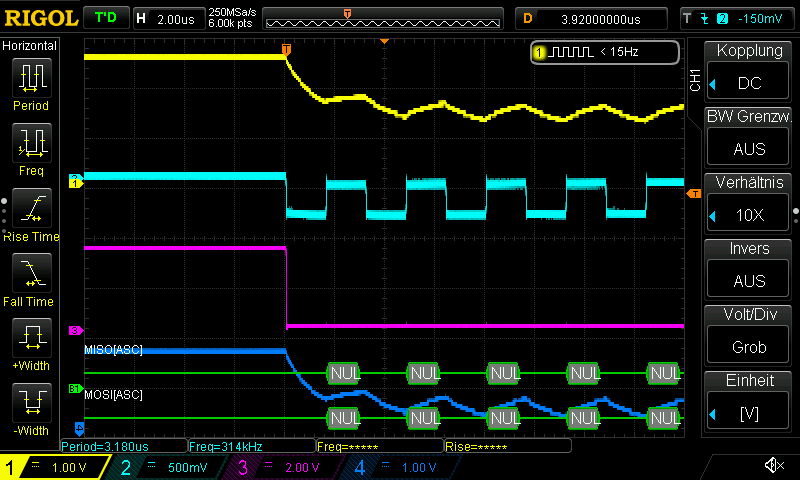
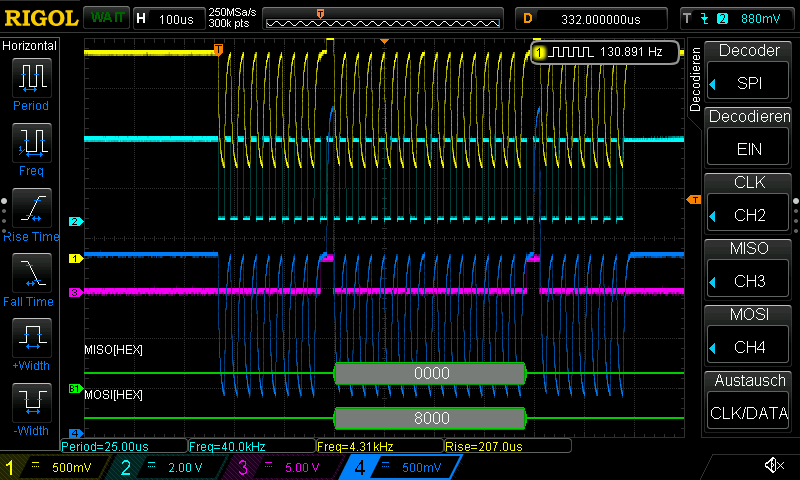
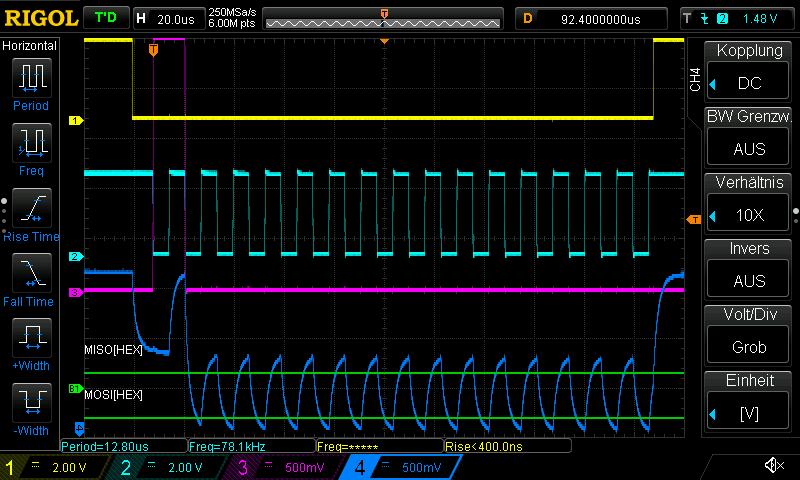
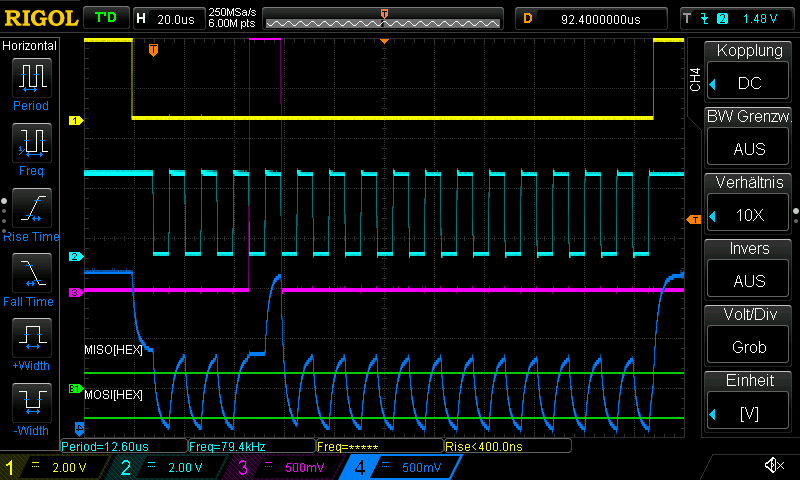
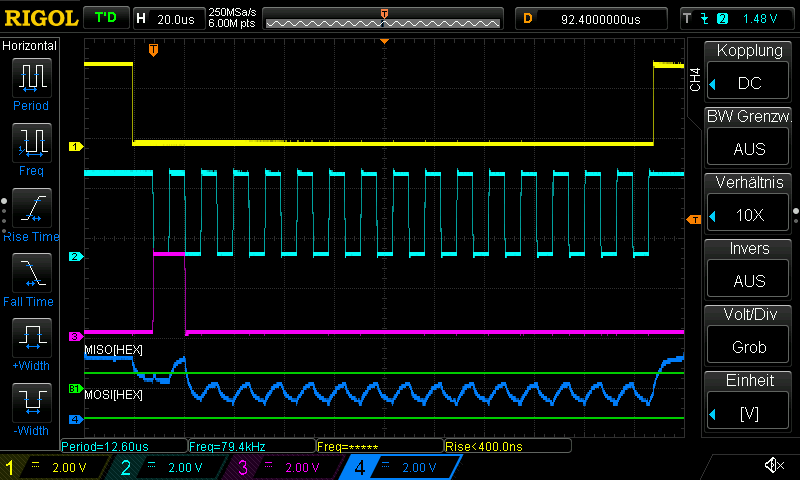
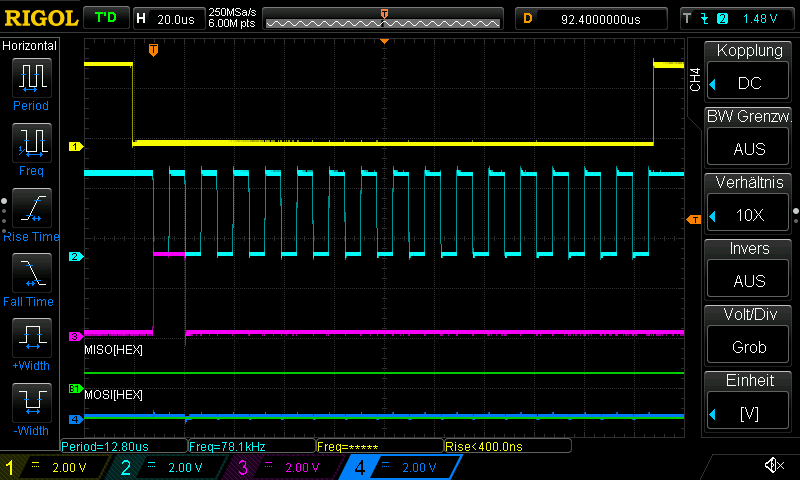
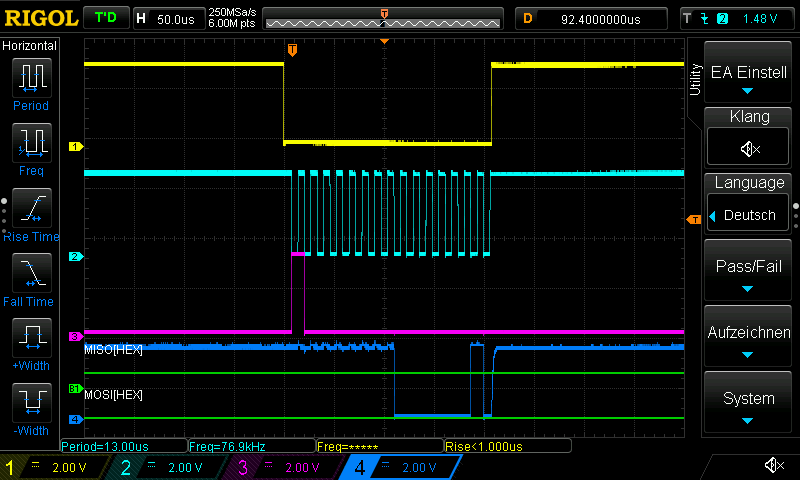
Ich habe mal ein aktuelles Oszibild mit Sensor.
gelb: NSS
hellblau: Clock
Lila: MISO
dunkelblau: MOSI
Das Signal MOSI und NSS sehen gleich aus... Komisch ist auch, der Oscar
liest eine 0x00 aus, auf der USART liegt 0x55.
Gruß
Daniel
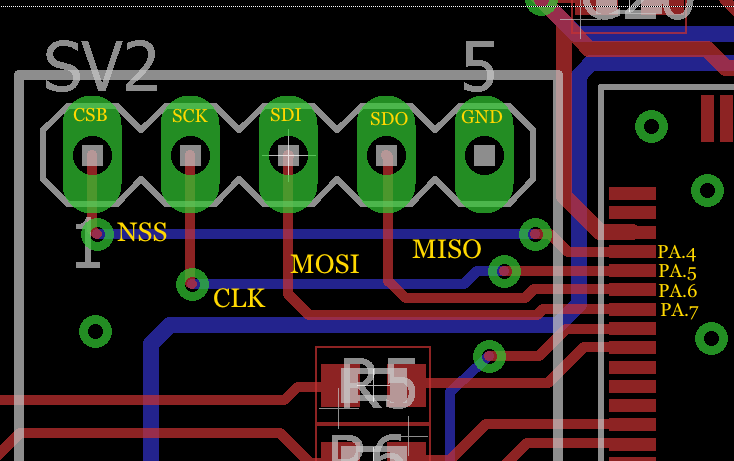
PS: Die dicke Leitung auf der BOTTOM-Seite wurde gekappt.
Puh vom Platinenlayout habe ich nicht viel Ahnung, aber ich kann mir
nicht vorstellen, dass es da bei dem Signal ein Problem in der Richtung
geben kann. Aber man sieht, dass der Takt Einfluss auf MOSI und NSS hat
(besonders bei den Flanken). Wie sieht den deine GPIO Konfiguration aus?
Erhöhe mal den Clockdivider und messe nochmal.
Mit dem Teiler habe ich jetzt auch gecheckt. Spasseshalber habe ich den
NSS auf Output gestellt, so das ich im Debug-Mode direkt auf den ODR
zugreifen kann. Aktiviere ich den ODR ziehe ich gleichzeitig den MOSI
mit hoch.
Aber warum sieht das Signal von der MOSI und NSS identisch aus?
Tja, mir gehen die Ideen aus. Aktuell würde ich auf das Platinenlayout
bzw. auf die Platine tippen. CLK kommt ordentlich durch und Pullups sind
auch vorhanden, am µC kanns irgendwie nicht liegen. Solche Wellen
bekommt man mit dem so nicht hin, es sei denn die Ausgänge sind defekt,
ist aber extrem unwahrscheinlich. Hast du noch mal den gleichen µC? Ich
würde einen Anderen mit dem gleichen Programm testen.
TriHexagon schrieb:> Tja, mir gehen die Ideen aus. Aktuell würde ich auf das> Platinenlayout> bzw. auf die Platine tippen. CLK kommt ordentlich durch und Pullups sind> auch vorhanden, am µC kanns irgendwie nicht liegen. Solche Wellen> bekommt man mit dem so nicht hin, es sei denn die Ausgänge sind defekt,> ist aber extrem unwahrscheinlich. Hast du noch mal den gleichen µC? Ich> würde einen Anderen mit dem gleichen Programm testen.
Ich vermute es auch, da ich zweimal den Sensor falschherum montiert
habe, daher kann es gut sein. Leider habe ich gerade keine zur Hand,
muss ich neu ordern.
Gruß
Daniel
Hallo,
ich habe hier einen STM32F411. Falls die kompatibel sind, kannst du mir
mal deine ELF/HEX schicken. Habe auf diesem auch einen funktionierenden
SPI Treiber, mit dem ich ein RFM-Modul ansteuere.
mfg
Felix F. schrieb:> ich habe hier einen STM32F411. Falls die kompatibel sind, kannst du mir> mal deine ELF/HEX schicken. Habe auf diesem auch einen funktionierenden> SPI Treiber, mit dem ich ein RFM-Modul ansteuere.
Vielen Dank, aber funktioniert das? Ich habe auf der Platine auch einen
externen Quarz mit 25 MHz und der Controller läuft mit 80 MHz.
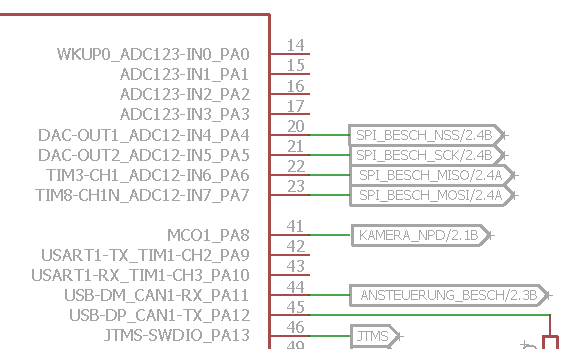
Das Pinning sieht hingegen gleich aus (SPI1 auf PA.04 bis PA.07) USART3
hingegegen fehlt.
Mir fällt aber gerade ein, das ich ja auch noch ein Nuceloboard mit dem
STM32F446 rumfliegen habe. Damit probiere ich den Code gleich mal aus.
Gruß
Daniel
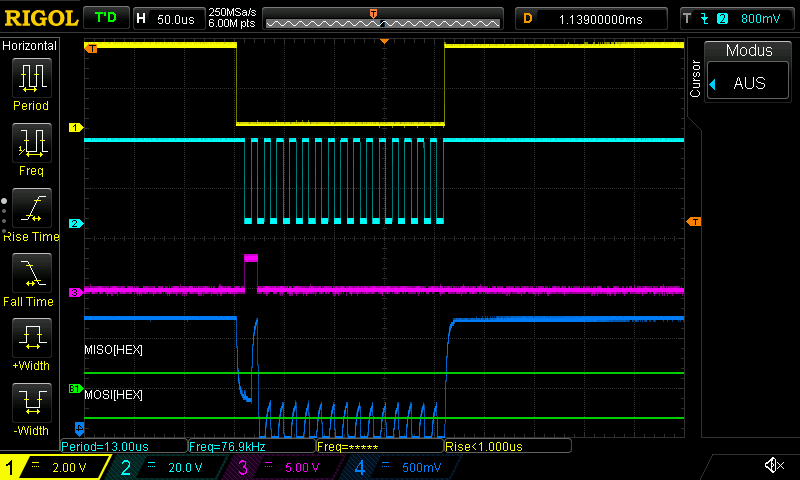
So, ich habe den Code auf den Nucleo getestet. Der Fehler lässt sich
reproduzieren. Mein NSS-Signal ist identisch mit dem MOSI-Signal.
Kann das an den ELV-Bausatz liegen?
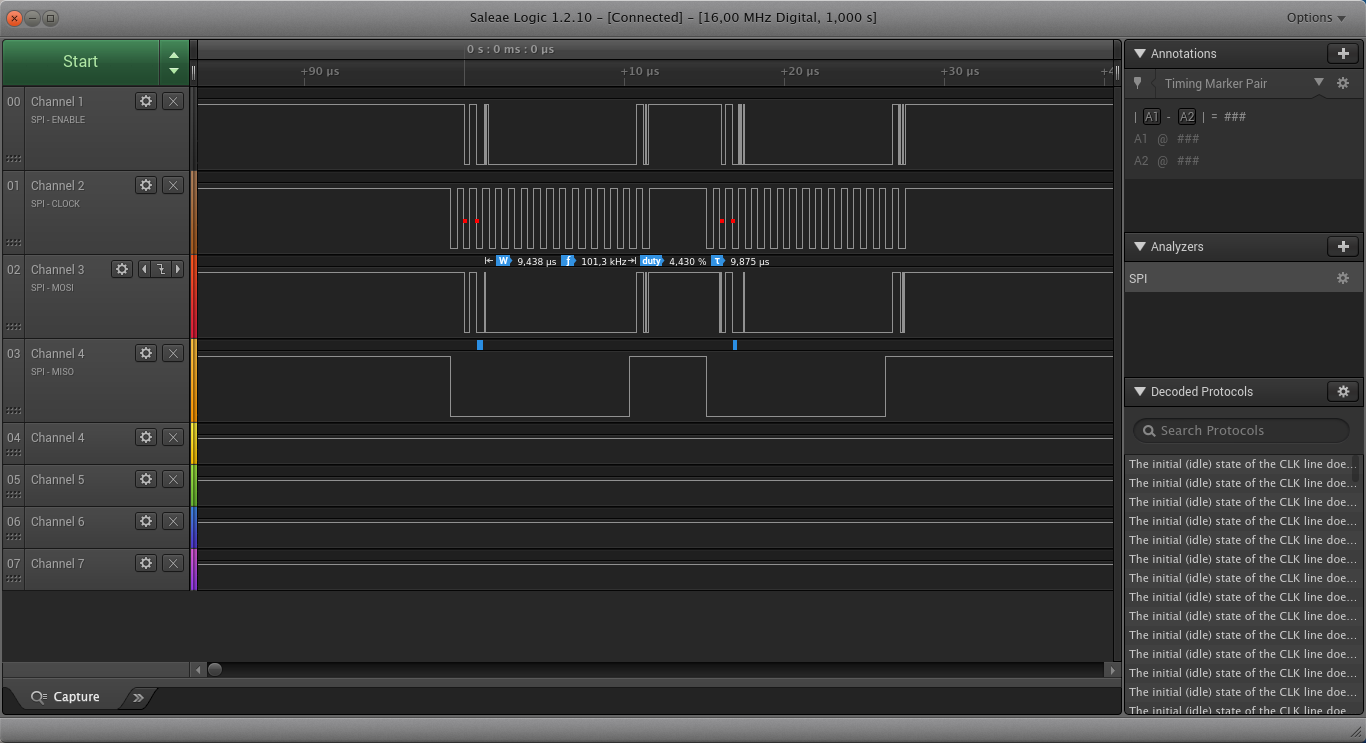
Bei der Bedienungsleitung des ELV-Bausatzes auf Seite 6 heißt es, dass
die maximale Busfrequenz aufgrund der Pegelwandler 100 kHz betragen
darf. Ich hab eben das Taktsignal mit meinem Oscar gemessen und habe
eine Periodenzeit von 22,7 µs, also 44,05 kHz gemessen.
Auch frage ich mich, warum das NSS-Signal so eigenartig aussieht...
Ohne Sensor ist nur das Takt- und MISO-Signal vorhanden.
Jemand Ideen?
Danke und Gruß
Daniel
Das ist meine Implementierung für den F411. Aber mit 16 Bit und CS
steuere ich manuell an. Für deine Zwecke müsstest du auf jeden Fall noch
den Prescaler anpassen.
mfg
Geil, danke, das werde ich nun durcharbeiten. Das selbe Phänomen habe
ich am Bildsensor ADNS3090, mit dem ich Bilddaten per SPI aufnehmen
möchte. Da sieht ebenfalls das NSS-Signal gleich dem MOSI-Signal aus.
Auch ist das NSS-Signal sägezahnartig.
Sehr eigenartig, alles
Ist die Adresse etwas sensorspezifisches?
Wenn ich z.B die Chip_ID im Register 0x00 auslesen möchte, würde ich
folgendes auf den Bus legen wollen:
*NSS auf Low ziehen
*0x80|0x00 Senden (0b10000000|0b00000000)
Dabei ist RW 1 = READ ADRESSE 0x00 und das Dummybyte auf SPI1
Wie implementiere ich dies in Deine SPI-Lösung?
also:
Hallo Daniel,
hast du irgendeine funktionierende SPI-Implementierung jemals selbst
umgesetzt? SPI ist vom Prinzip her sehr einfach. Du solltest zunächst
herausbekommen, wie du korrekt die Daten heraus-schicken kannst.
Als nächstes schickst du den Lesezeiger deines Sensors erst mal auf die
null und ließt alle Register die da folgen. Diese packst du dir auf
deinem Controller in ein Array. Sobald das funktioniert, kannst du
ordentlich debuggen, weil du jetzt die Änderungen im Sensor verfolgen
kannst. Du solltest mal einen Schritt zurückgehen und stumpf die
SPI-Schnittstelle bedienen. Denke dabei nicht darüber nach, was andere
machen, erst musst du die Schnittstelle verstanden haben. Der Rest kommt
dann automatisch.
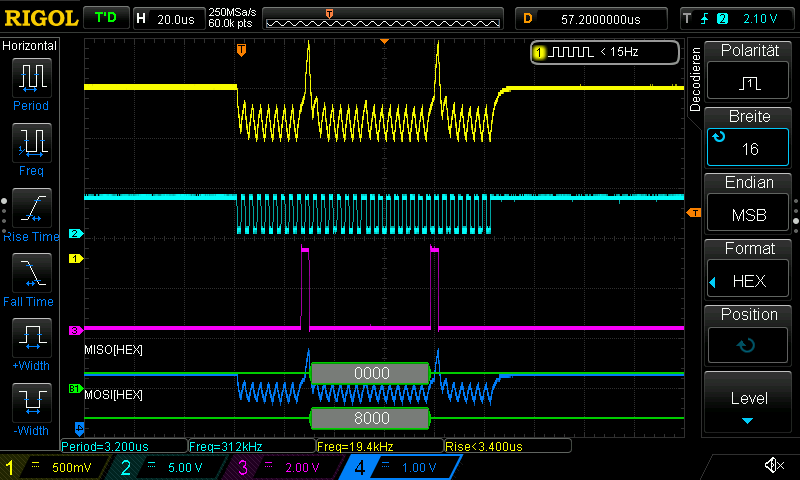
Hallo,
das RFM-Modul erwartet immer 16 Bit.
Die ersten 8 Bit bezeichnen die Registeradresse. Das MSB davon gibt an,
ob ich schreiben (1) oder lesen (0) will.
Die nächsten 8 Bit sind die zu schreibenden Daten wenn ich schreiben
will oder beim Lesen nur Dummy-Cycles, damit das Modul die Daten
zurückgibt.
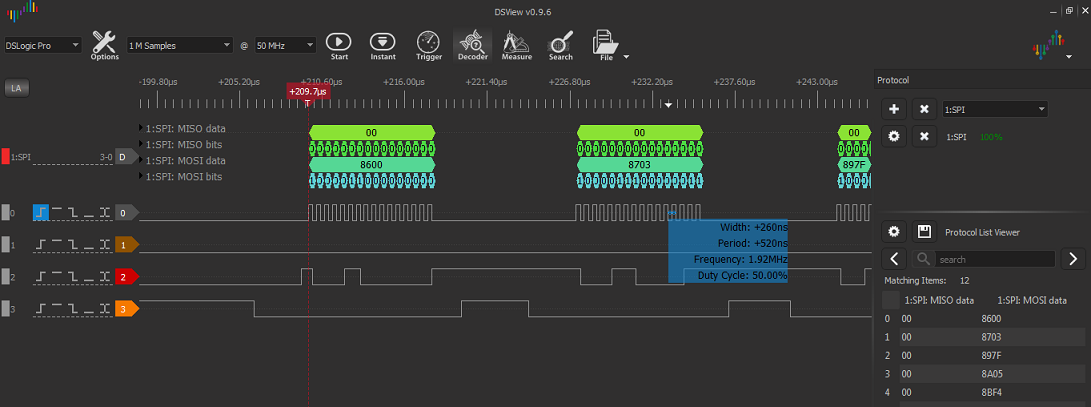
In meinem Screenshot wird als erstes 0x8600 geschrieben: Es wird also
ins Register 0x06 nur 0x00 geschrieben, die 8 ist das Write-Bit.
Wenn der SPI auf 8 Bit eingestellt ist, könnte man alternativ auch
schreiben:
Stromverdichter schrieb:> Hallo Daniel,> hast du irgendeine funktionierende SPI-Implementierung jemals selbst> umgesetzt?
Das ist meine erste eigene SPI-Implementierung auf einer ARM-Kiste.
Felix F. schrieb:> Die ersten 8 Bit bezeichnen die Registeradresse. Das MSB davon gibt an,> ob ich schreiben (1) oder lesen (0) will.> Die nächsten 8 Bit sind die zu schreibenden Daten wenn ich schreiben> will oder beim Lesen nur Dummy-Cycles, damit das Modul die Daten> zurückgibt
Der BMA020 erwartet auch 16 Bit. Hier ist es so dass das MSB 0 schreiben
und 1 lesen ist. Die Chip-ID liegt auf Register 0x00 und hinterher muss
ein Dummybyte mitgesendet werden:
NSS_LOW
auf MOSI-> 0x80|0x00
also mit Deiner Lösung habe ich folgende Lösung implementiert
1
voidbma020_READ(void)
2
{
3
BMA020_NSS_LOW;
4
5
bma020_WriteData(SPI1,0x08,0x00);
6
bma020_ReadByte(SPI1,0x00|0x00);
7
bma020_temp_data=bma020_ReadByte(SPI1,0x00|0x00);
8
USART_SendData(USART3,0xFF);
9
while(!(USART3->SR&USART_FLAG_TC));
10
11
BMA020_NSS_HIGH;
12
}
Diese Funktion habe ich in die main.c in die while-Schleife gepackt
zusammen mit einer anderen Testfunktion um zu sehen ob die Schleife
läuft.
Nichts tut sich und auf dem Oscar ist auch nichts zu sehen.
Danke und Gruß
Daniel
Felix F. schrieb:> Hast du meine Initialisierung übernommen? Dann musst du nämlich> deinen> Sensor auch an den entsprechenden Pins anschließen!>> mfg
Nene, ich habe lediglich die Sende und die Empfangsroutine übernommen.
Die GPIOs, RCC und SPI-Konfiguration sind jeweils in einer eigenen
Funktion und fasse diese am Ende in einer StartUp zusammen (natürlich in
der selben c-Datei) , welche ich in die Main vor der Schleife einlade.
Kommentiere ich die o.a. Funktion aus, läuft die Schleife.
Gruß
Daniel
Felix F. schrieb:> Wie sieht den der aktuelle Code aus? Im ersten Post kann ich nicht> mal> eine Initialisierung der Pins etc. sehen.>> mfg
Guten Morgen,
Ich habe die C-Datei mal hochgeladen.
Gruß
Daniel
Ich könnte mir jetzt vorstellen, wo der Fehler liegt. Ich habe ja den
NSS-Pin als Alternate Function konfiguiert, steuere diesen Pin aber
selber an.
Bisher bin ich davon ausgegangen, dass ich wenn
1
SPI_Init_BMA020.SPI_NSS=SPI_NSS_Soft;
gesetzt ist, dieser sich wie ein ganz normaler Pin verhält. Im
Diller-Tutorial ist der NSS-Pin auch nicht als AF gesetzt, sondern als
ganz normaler General purpose output mode-Pin.
So, ich habe jetzt nochmal rumprobiert und der SPI-Code von Felix
funktioniert leider nicht und ich hab auch kein Schimmer mehr woran es
noch liegen kann.
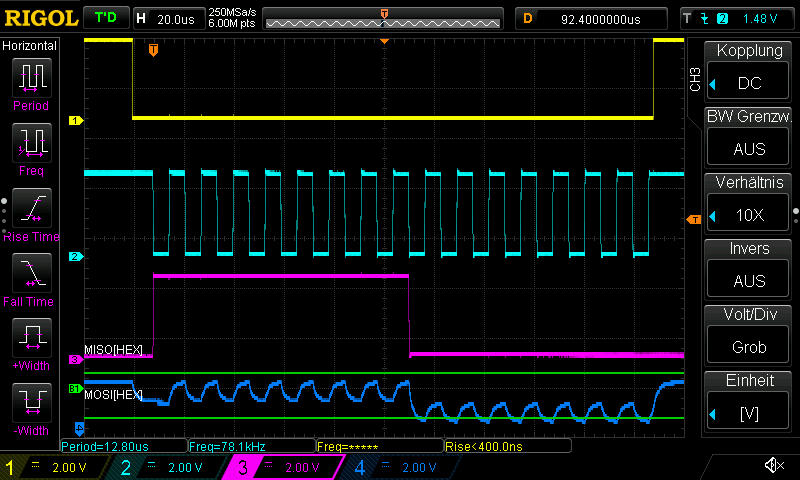
Das einzige was jetzt klappt ist NSS und der Takt. Der Takt stimmt auch
überein, was ich auf dem µC eingestellt habe.
Grundtakt: 80 MHz
AHB : /1
APB1 : /2
APB2 : /16
SPI1/div : /64
Macht f = (80/16*64) = 78,125 kHz. Am Oscar habe ich eine Zeit von 12,8
µs also 78,125 kHz gemessen. Der NSS und die MISO sind natürlich nicht
vertauscht.
Ich bekomme keinerlei Daten auf den Bus beschrieben, obwohl ich mich ans
das Protokoll des Datenblattes gehalten habe.
Kann mir einer vllt noch ein Impuls geben?
Danke und Gruß
Daniel
PS: Bei einem Bild habe ich versehentlich den Schalter an der Messspitze
1x verschoben.
Ach, das ELV Teil. Mit dem war ich auch schonmal verzweifelt. In meinem
Fall waren die Pull-Ups der Pegelwandler für Lego Mindstorms zu klein.
Und als ich sie dann vergrößerte, hatte ich ganz ähnliche
Signalverläufe, wie du.
Ich hatte letztendlich die Pegelwandler ausgebaut. Die I/O Pins des BMA
Chips sind trotz niedrigerer Spannungsversorgung 3,3V tolerant.
Versuche das mal.
Stefan U. schrieb:> Ich hatte letztendlich die Pegelwandler ausgebaut. Die I/O Pins des BMA> Chips sind trotz niedrigerer Spannungsversorgung 3,3V toleran
Diesen Tipp habe ich an anderer Stelle auch schon bekommen. Ich werde
dafür einen Sensor opfern.
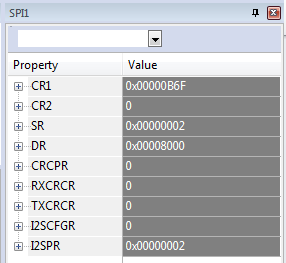
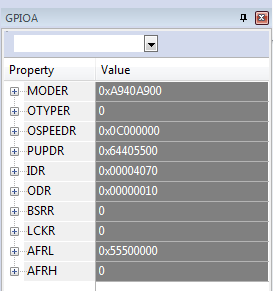
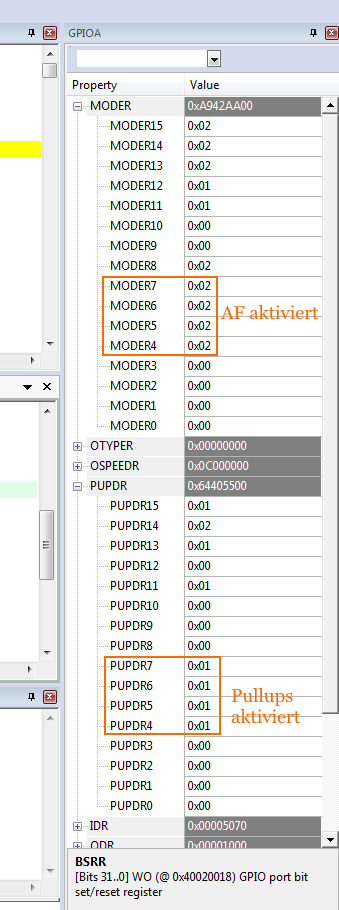
Christopher C. schrieb:> Gib uns mal die betreffenden Registerinhalte von SPI und GPIO. Das> müsste man ja dann reproduzieren können...
Sehr gerne.
PullUps braucht man beim SPI nicht. Und die Beschaltung des BMA ist auch
völlig uninteressant, solange am Oszi keine richtigen SPI Signale
ankommen.
Lade dir mal von ST die SPL oder Cube für den F4 runter. Dort sind für
jede Peripherie mehrere Beispiele drin. Und damit funktionierts dann
auch garantiert! Ich (und anscheinend auch kein anderer) habe keine Lust
mich durch dieses ganze Bitgeschubse durchzuarbeiten, wenn es dafür
einheitliche, prozessorunabhängige APIs gibt. Vlt. gibts ja Motivierte,
die das für dich machen.
mfg
Normalerweise müsste ich doch ohne Sensor auf der MOSI die Bytes
0x80|0x00 sehen. Aber leider sehe ich diese nicht. Der Fehler muss im
Code liegen. Das kann doch nicht sein...
Felix F. schrieb:> Und die Beschaltung des BMA ist auch> völlig uninteressant, solange am Oszi keine richtigen SPI Signale> ankommen.
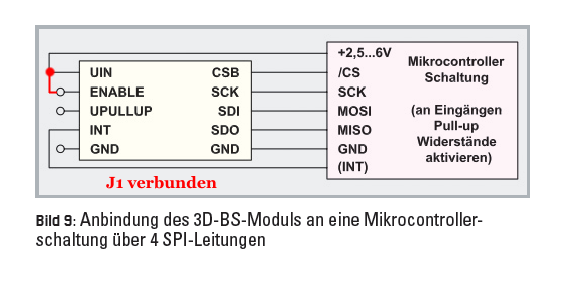
Es steht in der Anleitung aber expizit drin, das die Pullups aktiviert
werden sollen. Siehe mein Post vom 01.10.2016 14:49. Natürlich hatte ich
die Pullups auch schon deaktiviert. Die Timings und NSS funktionieren
ja, nur die MOSI und MISO nicht.
Kann das nicht an der fehlerhaften Sende/Empfangsroutine liegen? Auf der
MOSI ist ja einmal ein Peak.
Danke und Gruß
Daniel
Daniel V. schrieb:> Es steht in der Anleitung aber expizit drin, das die Pullups aktiviert> werden sollen.
Ja, aber solange der SPI nicht funktioniert ist es völlig egal was der
Sensor will.
Mal angenommen der SPI ist richtig initialisiert, dann müsste auch was
auf MOSI gesendet werden, wenn du ins DR schreibst:
1
SPIx->DR=Data;
Aber solange hierbei nichts auf dem Oszi erscheint, ist der SPI bzw. die
GPIOs nicht richtig initialisiert!
mfg
Felix F. schrieb:> Daniel V. schrieb:>> Es steht in der Anleitung aber expizit drin, das die Pullups aktiviert>> werden sollen.>> Ja, aber solange der SPI nicht funktioniert ist es völlig egal was der> Sensor will.>> Mal angenommen der SPI ist richtig initialisiert, dann müsste auch was> auf MOSI gesendet werden, wenn du ins DR schreibst:SPIx->DR = Data;> mfg
Ja, das tut er auch. Der Peak ist abhängig von:
Felix F. schrieb:> Schreib mal FF oder 55 ins DR. Und welches Signal ist welche> Farbe? Hast> du die GPIOs korrekt initialisiert? AF_Funktion?>> mfg
AF gesetzt auf PA.05, PA.06, PA.07 auf AF5 (SPI1). Nun habe ich gesetzt:
1
bma020_Write(SPI1,0xFF,0x00);
Felix F. schrieb:> Und welches Signal ist welche Farbe?
lila: MOSI /am Sensor: SDI
blau: MISO /am Sensor: SDO
also die Verschaltung ist MOSI am µC -> SDI am Sensor und umgekehrt
Danke und Gruß
Daniel
Bist du sicher, dass du Miso und Mosi nicht vertauscht hast am Oszi?
Konfiguriere Miso (PA6?) mal als Pull DOWN.
mfg
Mosi am besten auch als Pull DOWN.
Ja, die schalten in der Tat im selben Moment. Darauf habe ich jetzt gar
nicht mehr geachtet. Das ist ja seltsam.
Daher habe ich nochmals die Registerwerte geguckt:
PA.04 normaler Output-Pin
PA.05 Clock
PA.06 MISO
PA.07 MOSI
(wie es im Datenblatt des STM auch steht und auch Cube es mir anzeigt)
PA.04 bis PA.07 sind als Alternate SPI konfiguiert.
Pull-Down auf MOSI
Gruß
Daniel
Felix F. schrieb:> Wie sieht es aktuell auf dem Oszi aus?>> mfg
Habe ich PULL-DOWN aktiv, habe ich auf der MISO starke Verschmutzungen.
Danke und Gruß
Daniel
Hier muss ein Hardwareproblem vorliegen, es kann nicht sein dass der Pin
dauerhaft auf High gehalten wird!
Trenne mal die Misoleitung vom Sensor und miss einzeln mit dem Oszi. Am
STM MUSS dabei Low anliegen, am Sensor normal auch.
mfg
Felix F. schrieb:> Hier muss ein Hardwareproblem vorliegen, es kann nicht sein dass> der Pin> dauerhaft auf High gehalten wird!> Trenne mal die Misoleitung vom Sensor und miss einzeln mit dem Oszi. Am> STM MUSS dabei Low anliegen, am Sensor normal auch.>> mfg
Ist auch so. Ich habe jetzt mal ohne Sensor die Werte mit dem Oszi
angeguckt. Also ist der BMA020-Sensor über die Wupper gegangen. Werde
ich gleich mal einen neuen zusammenbauen.
Danke und Gruß
Daniel
[EDIT]: Fehler ist mit einem neuen Sensor reproduzierbar.
Felix F. schrieb:> Wie sieht den die Beschaltung des Sensors aus?>> mfg
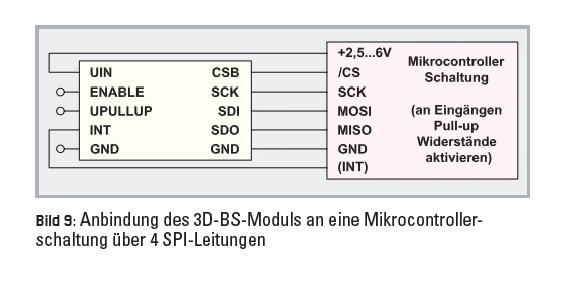
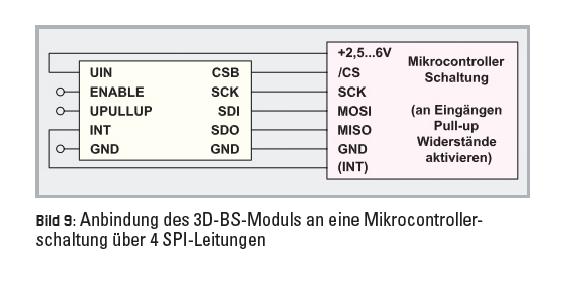
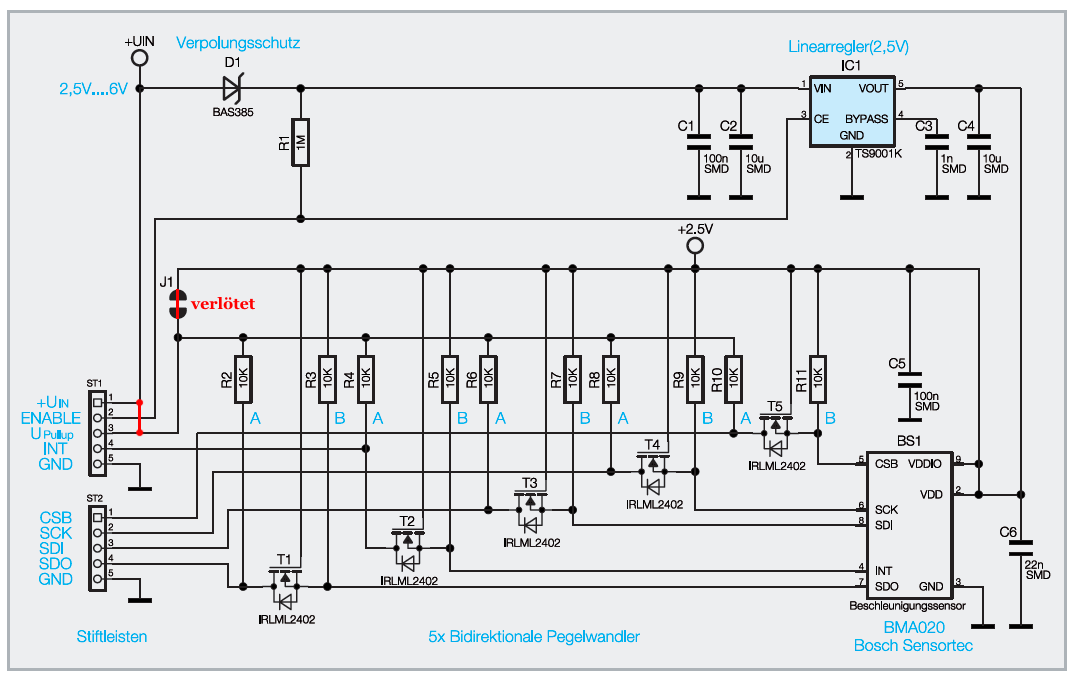
Schau mal, weiter oben, da ist der Schaltplan des ELV-Sensors, als
pdf-Datei Die Modifikationen die Stefan und ein ein Bekannter von mit
auch empfohlen haben, werde ich morgen mal bei einem Sensor durchführen.
Bei meinem Board gehen nur die vier Busleitungen an den Controller.
Gruß
Daniel
Daniel V. schrieb:> Felix F. schrieb:>> Wie sieht den die Beschaltung des Sensors aus?>>>> mfg>> Schau mal, weiter oben, da ist der Schaltplan des ELV-Sensors, als> pdf-Datei Die Modifikationen die Stefan und ein ein Bekannter von mit> auch empfohlen haben, werde ich morgen mal bei einem Sensor durchführen.>> Bei meinem Board gehen nur die vier Busleitungen an den Controller.>> Gruß> Daniel
Genau das hilft mir doch nicht weiter. Hast du die Leitungen 1:1
verbunden oder noch irgendeine Schaltung mit Pullups, Cs etc.
dazwischen??
Da STM und BMA beide mit 3,3V arbeiten, würde ich einfach mal Miso und
SDO direkt ohne sonst was verbinden. Mosi eigentlich auch. Nur Clk und
CS sollten mit PullUps High gehalten werden, aber das kann der STM auch
selbst ohne Hilfe.
mfg
Ach so, nein. Die Leitungen sind vom µC zum Sensor über Buchsen. Im
selben Post vom 01.10.2016 14:49 wo auch die PDF enthalten war, ist auch
das Layout meiner Platine enthalten. Ich habe beim Design die Leitung
extrem kurz gehalten und keinerlei Pullups oder sonstwas
hinzugefügt.Also µC raus, Sensor-Eingang rein.
Der Sensor selber hat wiederum Pegelwandler, damit man den Sensor in
einem großen Spannungsbereich einsetzten kann. Diese Flexibilität
bezahlt man jedoch mit der maximalen Frequenz, welcher der Sensor
betrieben werden kann.
Die Widerstände die Du unten sieht sind 22R für die USART, die zum FTDI
gehen, die haben nichts mit dem Bus zu tun.
Danke und Gruß
Daniel
Setzt bei Miso/Mosi nochmal den Pullup, bzw verbinde Miso aber nicht,
sondern miss nur den Ausgang beim Sensor mit dem Oszi und schick mal ein
paar Befehle, ob der Sensor reagiert. Macht der Sensorausgang überhaupt
was?
mfg
Guten Morgen zusammen,
Felix F. schrieb:> Setzt bei Miso/Mosi nochmal den Pullup, bzw verbinde Miso aber nicht,> sondern miss nur den Ausgang beim Sensor mit dem Oszi und schick mal ein> paar Befehle, ob der Sensor reagiert. Macht der Sensorausgang überhaupt> was?
Diese Messung werde ich heute Nachmittag direkt durchführen
Reiner.S schrieb:> Hast Du den UPULLUP von der Sensorplatine mit den 3,3V vom STM32> verbunden?
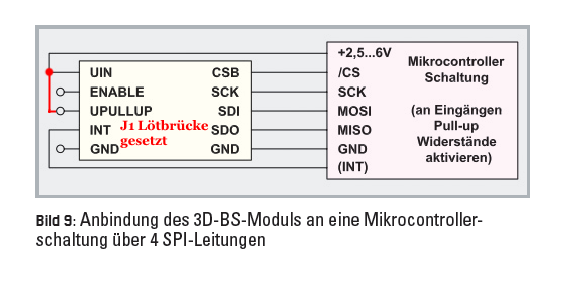
Nein, die Lötbrücke auf der Sensorplatine ist offen.
Danke und Gruß
Daniel
Die Lötbrücke J1 ist offen und nicht an 3,3 des µC angeschlossen. Wenn
ich gleich zuhause bin, werde ich das schnell mal machen.
Sehr guter Einwand!
Danke und Gruß
Daniel
Leute, ich werde verrückt! Es scheint zu funktionieren und zwar mit
diesem Tipp:
Stefan U. schrieb:> Du musst die Pull-Ups mit der Versorgungsspannung verbinden, sonst> hängen sie in der Luft.
Das darf doch wohl nicht wahr sein. Im Datenblatt ist die o.a.
Verschaltung angegeben und ich bin wieder eine Erfahrung reicher in
meiner noch sehr jungen Entwicklerlaufbahn...
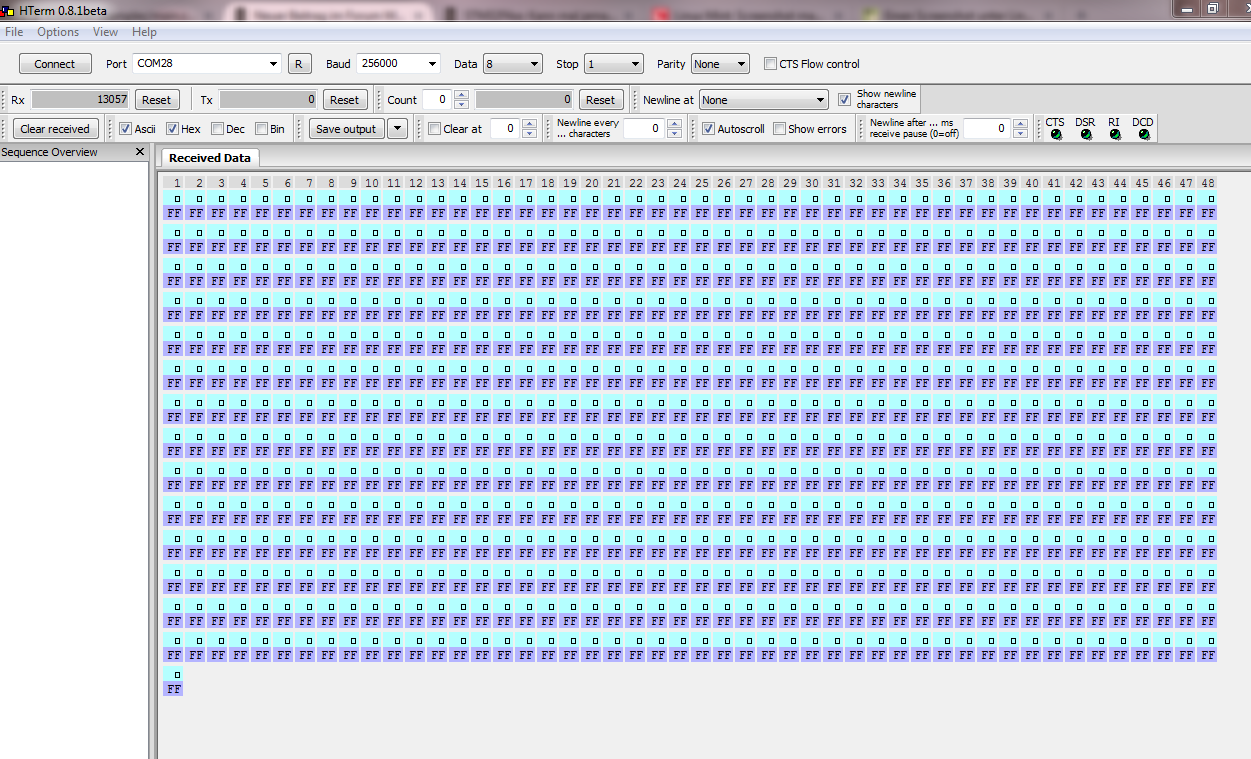
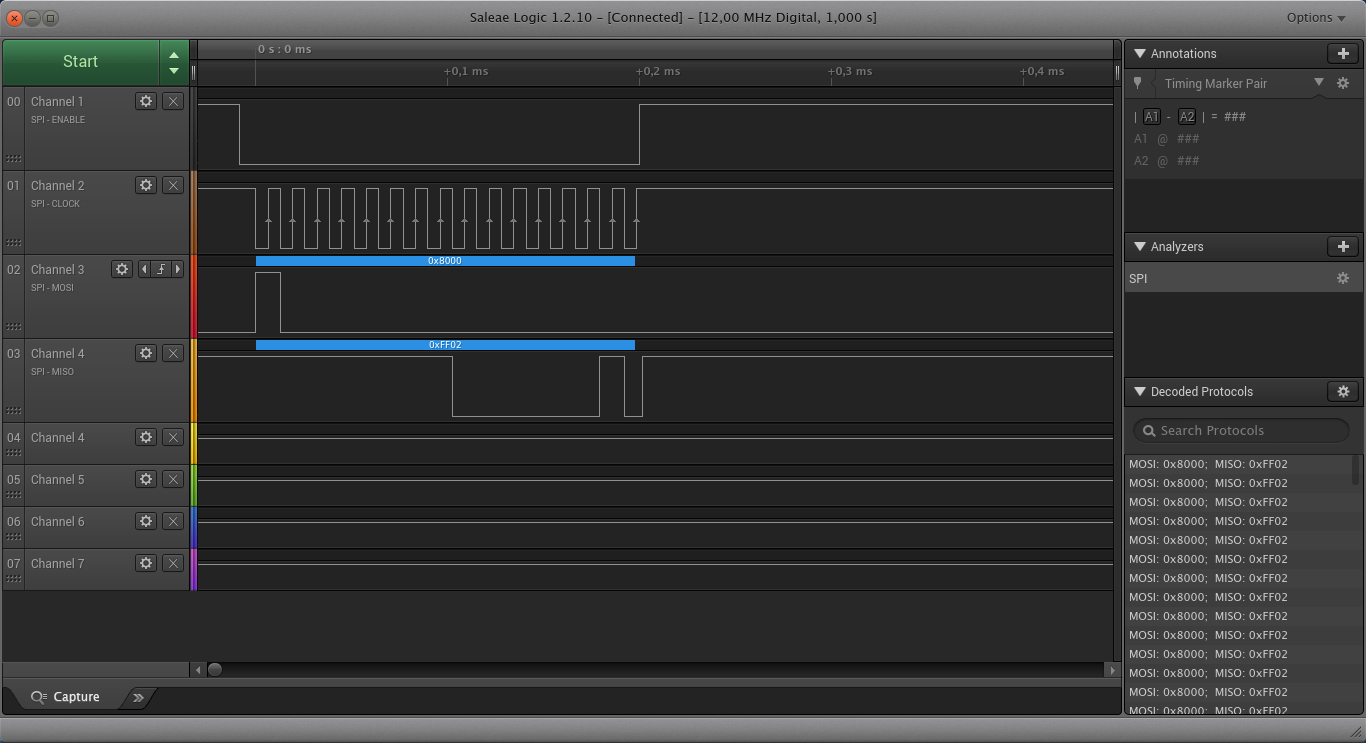
Ich gebe 0x80|0x00 auf den Bus und als Antwort erhalte ich 0xFF02 was
0b1111 1111 0000 0010 entspricht, was die Vorgabe im BMA-Datenblatt
entspricht.
Ich werde das nun mal weitertesten. Wenn ich euch mal irgendwann mal
persönlich treffen sollte, gebe ich euch ein Bier aus!
Danke und Gruß
Daniel
Also hast du doch noch eine Beschaltung am Sensor gehabt und nicht nur
direkt über Buchsenleisten verbunden. Deshalb haben CS und Miso auch im
selben Moment geschalten, da sie über die Pull Ups verbunden waren.
Und Enable hast du deswegen vmtl auch nicht bestromt...
mfg
Felix F. schrieb:> Also hast du doch noch eine Beschaltung am Sensor gehabt und nicht> nur> direkt über Buchsenleisten verbunden. Deshalb haben CS und Miso auch im> selben Moment geschalten, da sie über die Pull Ups verbunden waren.> Und Enable hast du deswegen vmtl auch nicht bestromt...>> mfg
Ja klar, den Sensor von ELV besitzt einen Pegelwandler. ENABLE zieht den
auf der Platine verbauten Linearregler auf Masse und wird somit
ausgeschaltet. Die o.a. Schaltung war in der von mir geposteten pdf.
Jetzt frage ich mich, warum der Sensor bei den Arduino-Leuten ohne zu
Murren fliegt und hier die Verschaltungsvorgabe aus dem Datenblatt des
ELV nicht funktioniert...
Danke und Gruß
Daniel
Zwei Sachen habe ich:
In meinem Post: www.mikrocontroller.net/topic/407652#4746755 ist in
einem Bild der Fehlerteufel eingeschlichen. Der Pin Enable wird nicht an
UIN angeschlossen, sondern UPULLUP. Dies habe ich entsprechend geändert.
Felix, deine Routine
habe ich nach wie vor nicht verstanden. Der Zeiger ist klar, aber die
Variable _adresse verundest Du das erste Byte mit 1 shiftest diese nach
links um 8 Bits und verundest diese wieder mit zwei Bytes.
Warum machst Du das?
Leider funktioniert diese Readroutine nicht. Hab ich einen Brett vor
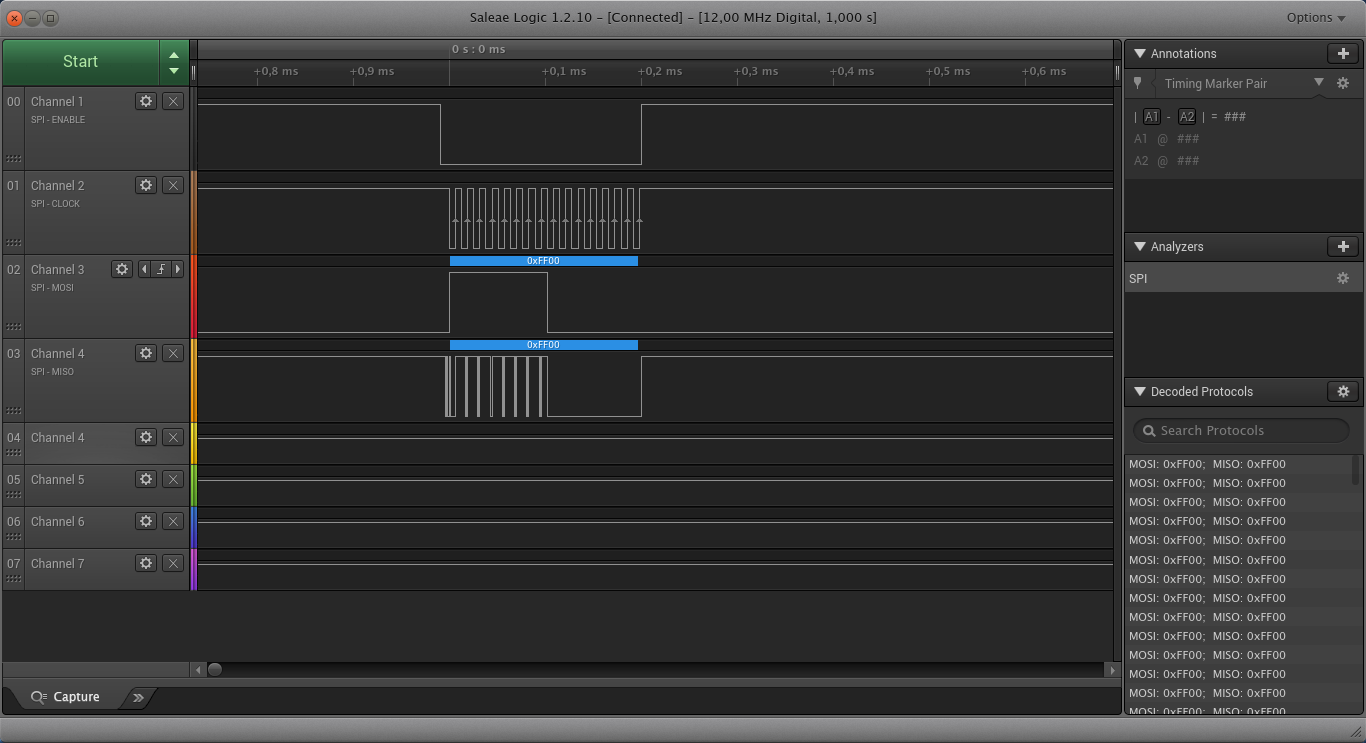
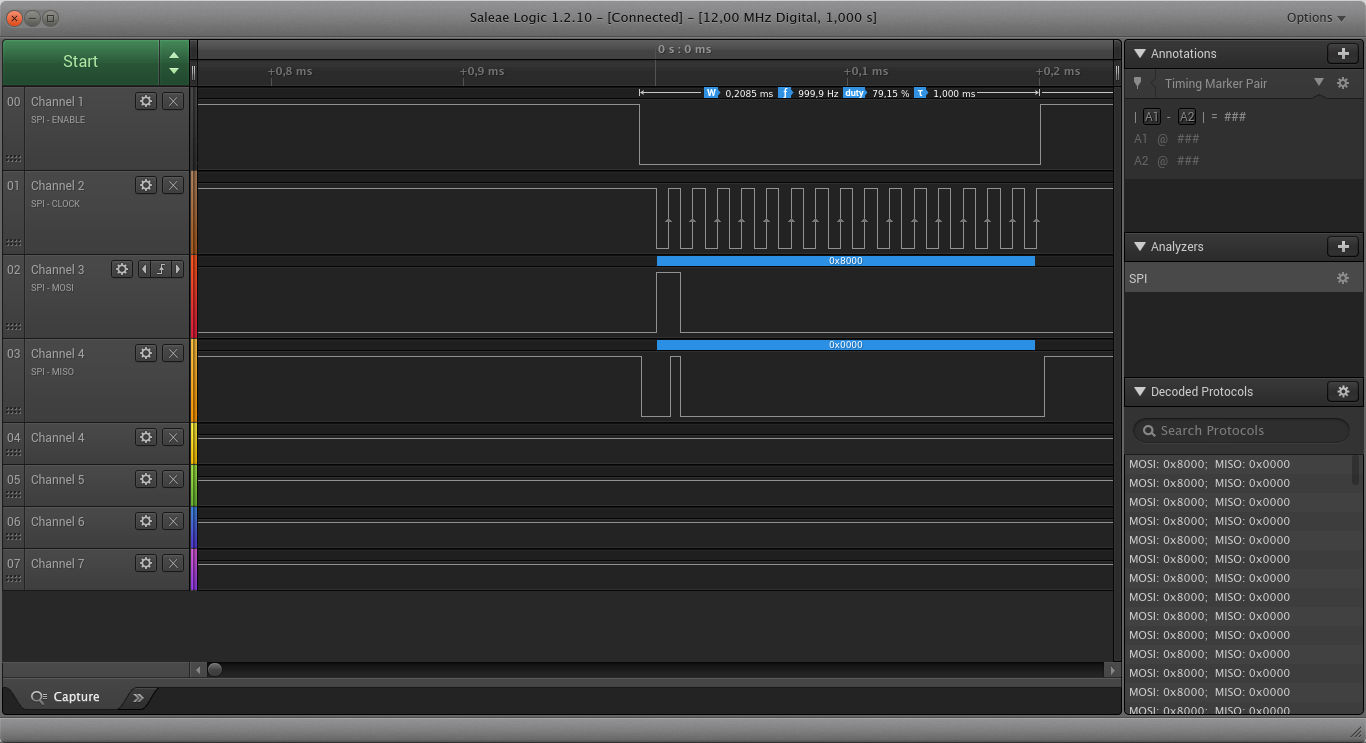
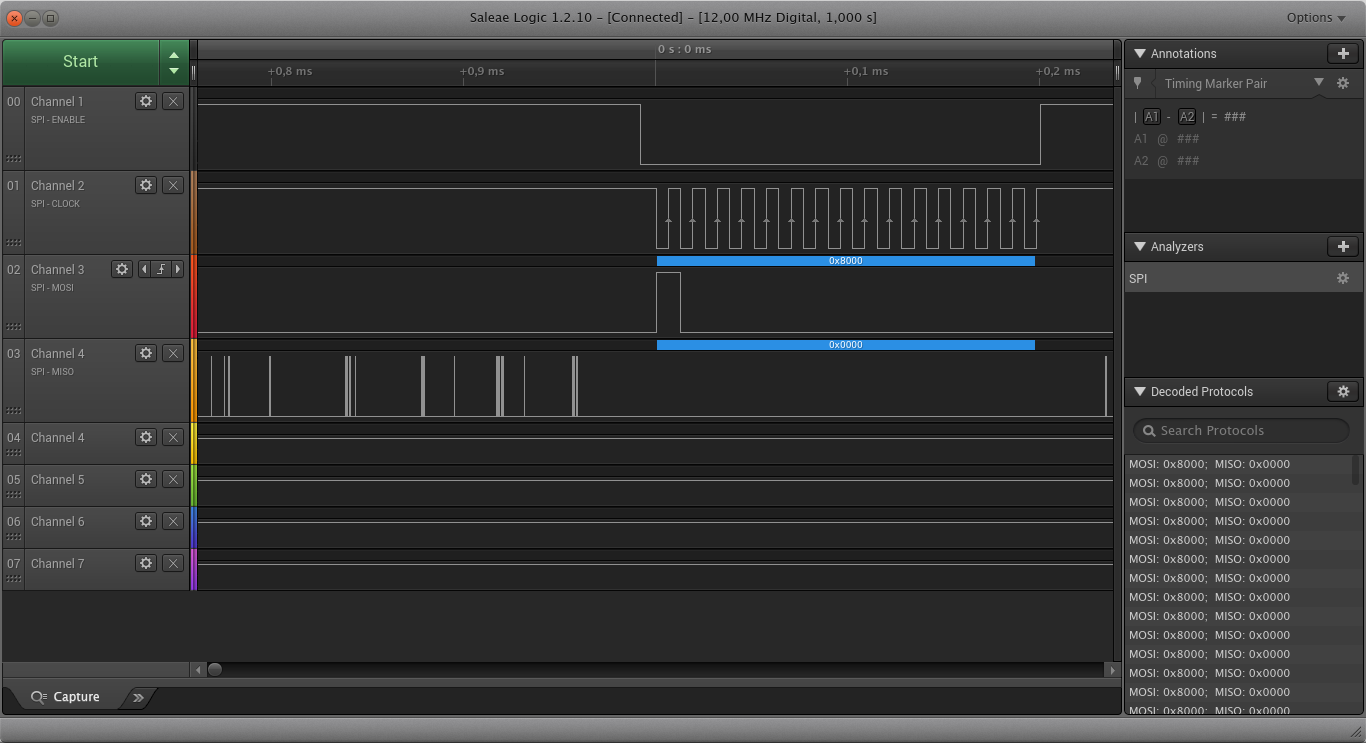
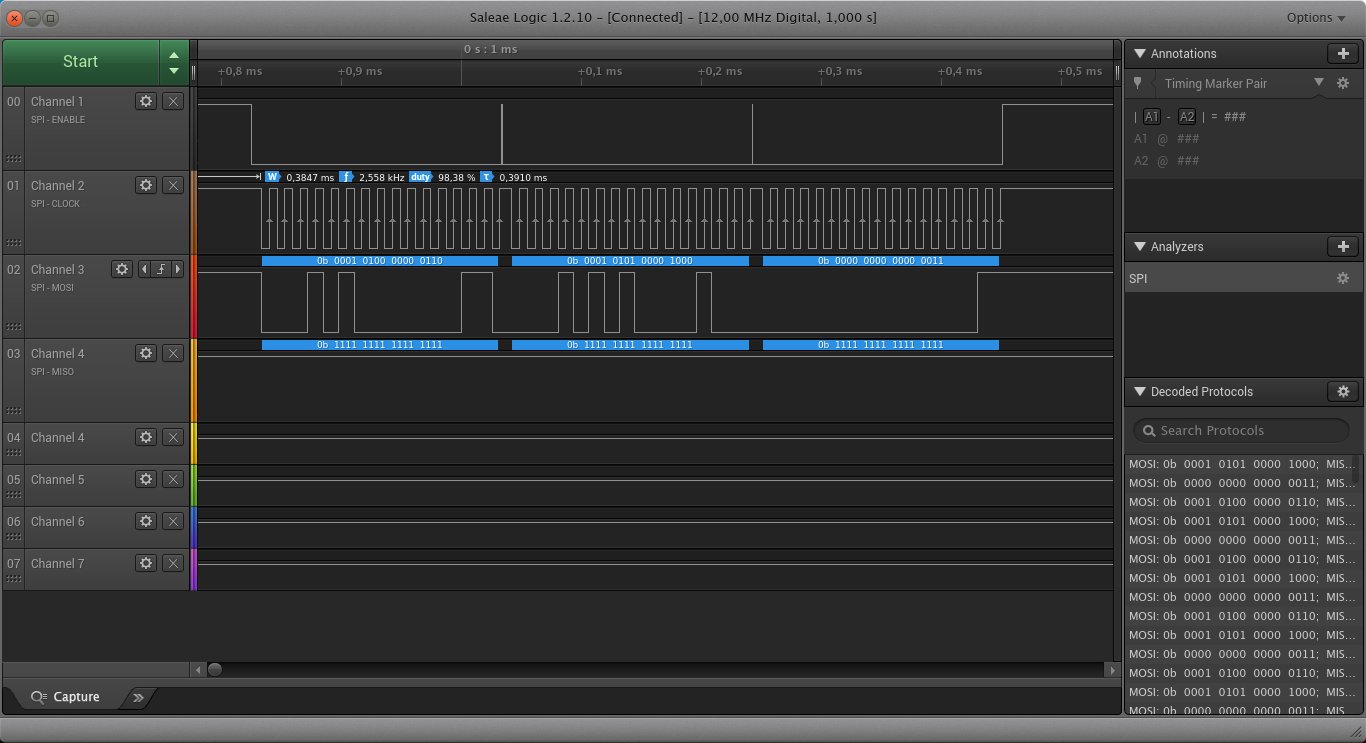
meinem Kopf (siehe Logic-Bild) :(
Das Senden funktioniert ohne Probleme und habe die entsprechenden Bits
im Register 0x14 (Bandbreite) und 0x15 (shadow_dis) gesetzt und dies
wird auch übertragen.
Danke und Gruß
Daniel
Also, die Read-Funktion bringt mich an den Rand des Wahnsinns. Folgendes
habe ich jetzt implementiert.
Als allererstes habe ich ein Flag definiert. Dieses markiert, ob die
Startsettings geladen wurden.
1
#define BMA020_SET_SUCCESS 1
2
#define BMA020_SET_FAIL 0
Danach habe ich eine if-Abfrage geschrieben, welcher dieses Flag
abfragt.
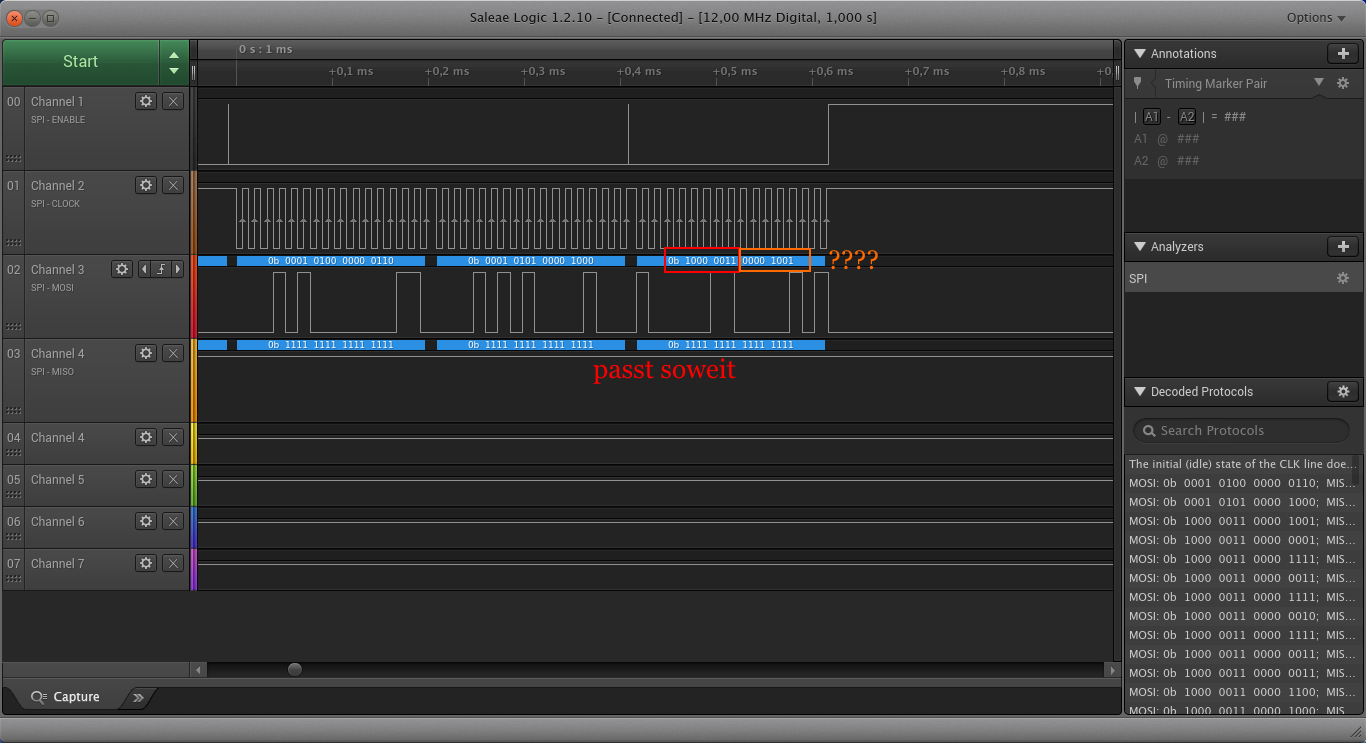
Es passt auch soweit alles, aber die MISO ist dauerhaft HIGH, er
überträgt keine Daten, obwohl die Settings korrekt übertragen werden
(Bandbreite und das gesetzte Shadow-Bit). Normalerweise müsste ich doch
die Registerwerte auf 0x03 (ACC X) im zweiten Byte auslesen und auf die
USART schreiben können. Das MSB=1 schicke ich auch mit. Ich verstehe es
nicht.
Danke und Gruß
Daniel
Gut gesehen :). Ich vermute, dass ich die Messkabel verwechselt habe.
Den Fehler habe ich schon korrigiert. Ich bekomme auch Daten gesendet
und ich kann diese auf der MISO sehen (bei 0x80|0x00) bekomme ich die
Antwort xxxxxxx10. Nun komme ich aber mit der Read-Routine vom Felix
nicht weiter (hab vieles schon ausprobiert).
Siehe frühere Posts.
Ich erwarte, wenn ich auf die MOSI (0x15|(1<<3)) für das Shadow-Bit und
die Bandbbreite (0x14|0x06) anschließend (0x01|0x02 & 0x00) das
Dummybyte die Daten des Sensors erhalte. Dies macht die Readfunktion
aber nicht und ich raff es einfach nicht.
Danke und Gruß
Daniel
Leider muss ich dieses Thema nochmal aufwärmen, aber allgemein zu SPI:
Felix F. schrieb:> CS_Low;> // Schreibbefehl an Register 0x06> SPI_Write(SPI1, 0x86);> // Schreibe 0x00 in Register 0x06> SPI_Write(SPI1, 0x00);> CS_High;
Dieser Code funktioniert mit 8 Bit nicht. Hier die jeweiligen Funktionen
von Felix die ich anderweitig einsetzten wollte (nicht BMA020, der läuft
einwandfrei)
Der Code funktioniert mit 8 bit nicht, weil er für 16 bit geschrieben
wurde. Deshalb habe ich es auch in meinem ersten Beitrag geschrieben und
die Funktion !WriteWORD! genannt!
Und daraus eine 8 bit Funktion abzuleiten ist nun wirklich nicht schwer,
vorausgesetzt man kann ein ganz, ganz kleines bisschen programmieren.
Felix F. schrieb:> Deshalb habe ich es auch in meinem ersten Beitrag geschrieben und> die Funktion !WriteWORD! genannt!
Ich sagte ja, ich bin blind... Felix, vielen Dank dafür, manchmal sieht
man den Wald vor lauter Bäumen mehr...
Gruß
Daniel
{kind=link}
{kind=link}