das 4-Zeilen-LCD soll am Arduino nano3 unter WinAVR in Betrieb genommen werden. Hinten sitzt eine IC2Platine YwRobot LCM1602. Im Gegensatz zu anderen Ausführungen sehe ich keine Lötpunkte für A0-A2. Die Pins 1-3 am PCF scheinen fest auf VCC zu liegen und nicht auf Masse wie in anderen Schaltplänen. Auf der Oberseite der I2C-Platine ist nur eine LED zu sehen - kein R dazu. Einen Stützkondensator für den PCF sehe ich auch nicht. Es sind wohl Teile auf der Rückseite der Platine - wohl auch zur Ansteuerung Backlight. Hat jemand einen Schaltplan dieser I2C-Platine? Die verwendeten PCF gehen nur bis 100kHz. Hat jemand mal schnellere eingebaut? Ggf. welche? Vielen Dank !
Matthias W. schrieb: > Die verwendeten PCF gehen nur bis 100kHz. Hat jemand mal schnellere > eingebaut? Ggf. welche Warum? Da hängt nur ein Display dran.
Atmel schrieb: > Warum? Da hängt nur ein Display dran. je schneller die Daten weggeschickt sind umso eher kann der Prozessor wieder etwas anderes machen. Daher gibt es ja auch SPI und andere schnelle Busse. Kennst Du dieses Display? Hast Du dazu einen Plan?
Angehängte Dateien:
-

lcm1606.png
33 KB
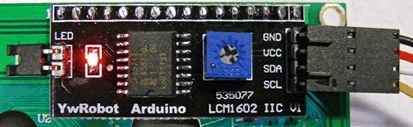
Atmel schrieb: > https://arduino-info.wikispaces.com/LCD-Blue-I2C Danke. Dieses Teil habe ich. Dazu fehlt mir der Schaltplan. Ich nehme an daß Teile auf der Rückseite sind die ich nicht sehen kann ohne es komplett von der Platine abzulöten. Vermutlich wird da ein Keramik-C sein, ein Transistor, ein 12k-Widerstand Basis nach VCC, ein 1k Vorwiderstand für die LED. Seltsam wenn Teile auf 2 Seiten bestückt werden. Normalerweise vermeidet man so etwas doch.
@Matthias W. (matt007) >> Warum? Da hängt nur ein Display dran. >je schneller die Daten weggeschickt sind umso eher kann der Prozessor >wieder etwas anderes machen. Prinzipiell ja, praktisch nein. Für ein so einfaches LCD ist auch ein 100kHz I2C Bus mehr als schnell genug, da bekommt man um die 1000 Zeichen/s durch. Sollte reichen, selbst für einfache Animationen ;-) Beitrag "Re: I2CLCD Library für HD44780 LCDs"
Falk B. schrieb: > Beitrag "Re: I2CLCD Library für HD44780 LCDs" Danke für den Hinweis Falk. "Hatte ich dennoch mal mit 400kHz betrieben, ging ;-)" scheinbar gehen die PCF ggf. viel schneller als erwartet. Ich habe nun 3.9k als Pullup angelötet und einen einfachen Treiber geschrieben. Mal sehen was dabei herauskommt. Es ist schon etwas wie Missbrauch wenn über den recht langsamen Bus erst die Adresse des PCF, dann die Daten hi, dann das E-Signal, dann wieder weg, dann die Daten lo, dann das E-Signal, dann wieder weg und dazu noch Start und Stop gesendet werden muss um ein Zeichen rauszubringen. Wenn ich das mit einem einfachen Schieberegister vergleiche... das kann auch mit 2MHz oder schneller laufen.
Matthias W. schrieb: > "Hatte ich dennoch mal mit 400kHz betrieben, ging ;-)" > scheinbar gehen die PCF ggf. viel schneller als erwartet. Geht es um eine reale Anwendung oder einfach nur "ich habe den Schnellsten"? Für mein 1602 habe ich mit einer beliebigen, aus dem Internet gezogenen Library ca. 20ms pro Zeile. Da ich das Display bzw. Teile davon nur beschreibe, wenn sich ein Wert geändert hat, sehe ich kein Zeitproblem.
Angehängte Dateien:
-

LCD_LA2_400khz.png
170 KB
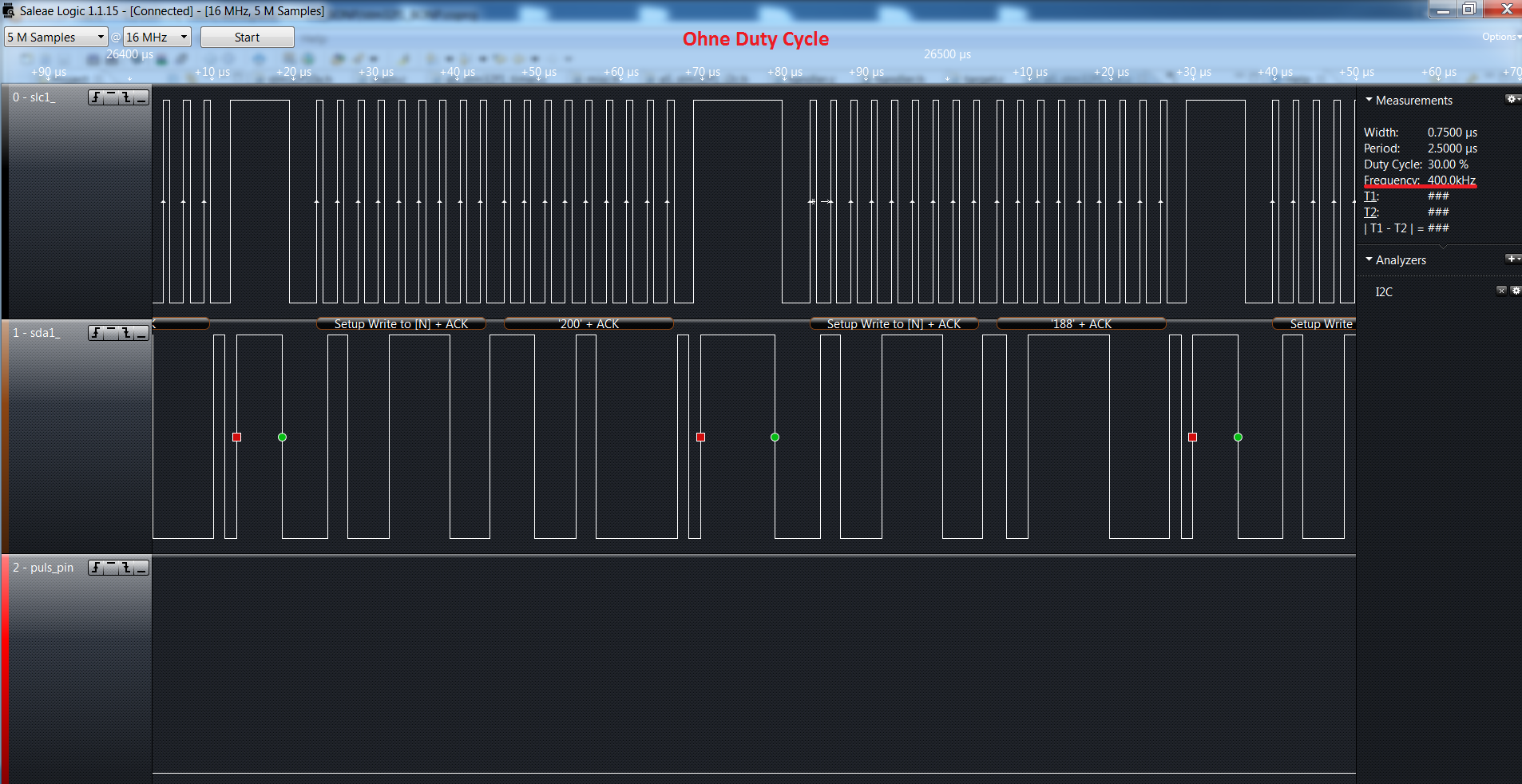
Servus, 400khz klappt wunderbar. Anbei ein Bild. Pullup bei 5V 1.6k. Man braucht auch kein delay von ca. 37µs zu generieren, da 2 bytes senden dauert 50µs.
aSma>> schrieb: > 400khz klappt wunderbar. Anbei ein Bild. Pullup bei 5V 1.6k. Danke ! Sieht gut aus. 3.9kOhm müsste auch gehen. So läuft jedenfalls die Maxim Echtzeituhr mit 400kHz. Dabei sehen die Signale zwar oben etwas rund aus - aber es klappt einwandfrei.
Matthias W. schrieb: > je schneller die Daten weggeschickt sind umso eher kann der Prozessor > wieder etwas anderes machen. Wieso sollte der Prozessor zwischen den Paketen nichts tun? Ich schicke bei meinen Projekten jede ms ein Zeichen im IRQ - zusammen mit der Tasterabfrage. Gruß Jobst
Bitte melde dich an um einen Beitrag zu schreiben. Anmeldung ist kostenlos und dauert nur eine Minute.
Bestehender Account
Schon ein Account bei Google/GoogleMail? Keine Anmeldung erforderlich!
Mit Google-Account einloggen
Mit Google-Account einloggen
Noch kein Account? Hier anmelden.