Hallo zusammen, Kann mir jemand Literatur oder Quellen nennen in denen der Zusammenhang zwischen Drehmomentkurve bei Vollschritten und bei Mikroschritten bei einem Schrittmotor beschrieben werden? Mich interessiert die Frage, reduziert sich das Drehmoment mit zunehmenden Mikroschritten und wenn ja wie ist der Formale Zusammenhang. Danke
Wenn ich so etwas lese frage ich mich immer, ob Google schon wieder down ist ... z.B. http://www.omega.de/prodinfo/schrittmotoren.html
Marco L schrieb: > Mich interessiert die Frage, reduziert sich das Drehmoment mit > zunehmenden Mikroschritten und wenn ja wie ist der Formale Zusammenhang. Warum sollte sich beim Mikroschrittbetrieb irgendetwas am Drehmoment ändern. Die Schritte werden lediglich feiner aufgetreilt, d.h. du musst die Schrittfrequenz entsprechend dem Schrittmodus korrigieren. Bis auf Laufruhe und dadurch bedingte Verringerung von Resonanzanregungen ändert sich nichts, i.e. es kommt auf den Motor und auf das, was dran hängt, an.
Eine Quelle, die ausdrücklich den Zusammenhang herstellt und beschreibt kenne ich nicht. Allerdings würde ich, in der selben Situation erstmal "Elektrische Schrittmotoren und Antriebe", Hrsg. Wilfried Bartz lesen. Aus allgemeinen Überlegungen ergibt sich, dass das Drehmoment neben der Winkelabhängigkeit auch einen relativ einfachen Zusammenhang mit der Differenz der Ströme in den jeweiligen Wicklungen hat. Ausserdem ergibt sich aus dem Verfahren selbst, der allgemeinere Schluss, dass das Integral des Drehmoments geringer als beim Vollschrittbetrieb ist. Im Detail hängt das aber von dem Stromverlauf ab, für den es ja bei Mikroschritt einige Varianten gibt. Mit ein bisschen Algebra und notfalls etwas Analysis sollte das aber recht einfach gehen, vermute ich jetzt mal ins Blaue.
Hallo Dieter, der Beitrag in dem Link liefert leider keine nachvollziehbare Begründung für die These, dass bei Halb- und Mikroschritt ca. 30% weniger Drehmoment zur Verfügung stehen. Meiner Erfahrung nach hat man nur dann weniger Drehmoment, wenn man den Strom nicht entsprechend anpasst. Der Motornennstrom ist ja auf den Vollschrittbetrieb (beide Wicklungen bestromt) bezogen. Bei Mikroschritt muss dann der Spitzenstrom auf 141% des Nennstroms eingestellt werden, damit in den Vollschrittpositionen in beiden Wicklungen der Nennstrom fließt. Mit freundlichen Grüßen Thorsten Ostermann
Hallo Wolfgang, > Marco L schrieb: >> Mich interessiert die Frage, reduziert sich das Drehmoment mit >> zunehmenden Mikroschritten und wenn ja wie ist der Formale Zusammenhang. > > Warum sollte sich beim Mikroschrittbetrieb irgendetwas am Drehmoment > ändern. Die Schritte werden lediglich feiner aufgetreilt, d.h. du musst > die Schrittfrequenz entsprechend dem Schrittmodus korrigieren. Jain. In der Theorie gebe ich dir recht. In der Praxis hängt das davon ab, wie gut der Treiberchip die idealen sinusförmigen Ströme in die Wicklungen einprägen kann. Gerade bei älteren Mikroschritt-Treibern stellt man dann doch fest, dass man mit steigender Mikroschritt-Auflösung geringere Maximaldrehzahlen erreicht. Und das ist nicht irgendwelchen Begrenzungen bei der Takterzeugung geschuldet, um die Vermutung gleich vorweg zu nehmen. Bei meinen Versuchen mit dem DRV8711 von TI hängen die erzielten Ergebnisse stark von der Konfiguration des Chips ab. Das schöne ist allerdings, dass der vielfältige Einstellmöglichkeiten hat, so dass man das Verhalten gut an den verwendeten Motor anpassen kann [1]. Mit freundlichen Grüßen Thorsten Ostermann [1] http://www.mechapro.de/smoover-drv.html
Thorsten O. schrieb: > Bei meinen Versuchen mit dem > DRV8711 von TI hängen die erzielten Ergebnisse stark von der > Konfiguration des Chips ab. Das schöne ist allerdings, dass der > vielfältige Einstellmöglichkeiten hat, so dass man das Verhalten gut an > den verwendeten Motor anpassen kann Genau diesen Treiber (EVALBoard) verwende ich für die Schrittmotorenansteuerung! Ich benutze zwei Schrittmotoren für eine Kolbenpumpe, abwechslungsweise stösst der eine oder andere Kolben Flüssigkeit aus, was einen pulsationsfreien Fluss gewährleisten soll. Im Halbschrittbetrieb, wo mir "Drehmomentkurven" der Hersteller vorliegen, ist die Pumpe nicht zu gebrauchen, Resonanzen, Geräusche, weshalb ein Mikroschrittbetrieb nahe lag (-> gleichmässigere Bewegung, Unterdrückung von mech. Resonanzen). Bei unseren Messungen (hohe Mikroschrittauflösungen) haben wir nun festgestellt, dass sich die Umkehrpunkte der Kolbenpositionen, gemessen mit einem linearen magnetischen Encoder (Auflösung 2um), sich verschieben. Was ein Indikator für Schrittverluste ist. Mit immer gröberen Schritten funktionierte die Pumpe bei gewissen Betriebspunkten dann wieder besser bis gut. Deshalb meine Frage ob Mikroschrittbetrieb die Drehmomentkurve beeinflusst, da in den Datenblättern ausschliesslich die Drehmomentkurve im Halbschritt angegeben wird und die Resonanzen meist unterschlagen sind. (Natürlich hängen diese auch vom Aufbau ab, mich überrascht aber, dass es hier kein Norm für die Vermessung gibt??) Danke für die rege und schnelle Beteiligung!!! Top!
Thorsten O. schrieb: > der Beitrag in dem Link liefert leider keine nachvollziehbare Begründung > für die These, dass bei Halb- und Mikroschritt ca. 30% weniger > Drehmoment zur Verfügung stehen Hallo Thorsten, nicht mein Betrag - sondern der verlinkte Beitrag ... Aber es gibt auch nocht andere, hier sogar mit Begründung: http://www.haydonkerk.de/128/produkte/downloads/schrittmotor-theorie.htm (übrigens alles auf der 1. Google-Trefferseite) Ich bin kein Profi (wie Du) und kann mich nur auf die Aussagen solcher verlassen. Das hier http://www.controllersandpcs.de/pdfs/schrittmotoren.pdf (S. 24) ist übrigens auch interessant und deckt sich mit Deiner Aussage Thorsten O. schrieb: > Bei Mikroschritt muss dann der Spitzenstrom auf 141% > des Nennstroms eingestellt werden, damit in den Vollschrittpositionen in > beiden Wicklungen der Nennstrom fließt. Bleiben, nach deren Aussage, noch ca. 5 % Drehmomentverlust. Gruß Dieter
Hier hat sich mal jemand intensiver mit Microstepping auseinandergesetzt. Ich bin jetzt gerade nicht sicher wie gut das die Fragestellung abdeckt, aber es sieht aus als wäre es ein interessanter Lesestoff: http://hackaday.com/2016/08/29/how-accurate-is-microstepping-really/ Viele Grüße, Simon
@Dieter: Die von dir genannten Beiträge beziehen sich beide nur auf den Halbschrittbetrieb. Haydon geht davon aus, dass in den Halbschritt-Positionen der gleiche Wicklungsstrom verwendet wird wie in den Vollschrittpositionen. Dann hat man natürlich ein niedrigeres Drehmoment. Moderne Mikroschritt-Treiber passen auch in den Halbschritt-Positionen den Motorstrom entsprechend an. Und auch der guten alten L297/L298 Kombination kann man das beibringen [1, Seite 3-4]. Im 2. Beitrag ist das Diagramm dazu aus einer Applikation Note von TI entnommen, welche ich z.B. bei meiner 3D-Step schon vor rund 15 Jahren umgesetzt habe. @Simon: Interessanter Beitrag, dass deckt sich mit dem was ich auch schon geschrieben habe [2, 3]. Mit freundlichen Grüßen Thorsten Ostermann [1] http://www.mechapro.de/pdf/Funktionsbeschreibung_3D-Step_20120819.pdf [2] http://www.schrittmotor-blog.de/positioniergenauigkeit-von-schrittmotoren/ [3] http://www.schrittmotor-blog.de/die-bedeutung-des-lastwinkels-bei-schrittmotoren/
Hallo Marco, >> Thorsten O. schrieb: >> Bei meinen Versuchen mit dem >> DRV8711 von TI hängen die erzielten Ergebnisse stark von der >> Konfiguration des Chips ab. Das schöne ist allerdings, dass der >> vielfältige Einstellmöglichkeiten hat, so dass man das Verhalten gut an >> den verwendeten Motor anpassen kann > > Genau diesen Treiber (EVALBoard) verwende ich für die > Schrittmotorenansteuerung! ... > Bei unseren Messungen (hohe Mikroschrittauflösungen) haben wir nun > festgestellt, dass sich die Umkehrpunkte der Kolbenpositionen, gemessen > mit einem linearen magnetischen Encoder (Auflösung 2um), sich > verschieben. Was ein Indikator für Schrittverluste ist. Das glaube ich nicht. Bei Schrittverlusten steigt der Motor deutlich hörbar aus. Wenn einzelne Schritte "verloren" gehen, ist das meist auf EMV-Probleme zurückzuführen. Eine reproduzierbare Verschiebung in den Umkehrpunkten deutet dagegen auf Abweichungen beim Drehmoment hin (s.u.). > Mit immer > gröberen Schritten funktionierte die Pumpe bei gewissen Betriebspunkten > dann wieder besser bis gut. Probier mal verschiedene Einstellungen für den Decay-Mode (Register 0x4). Das hat erfahrungsgemäß großen Einfluss auf den Stromverlauf. Ggf. musst du auch das PWM-Timing anpassen. Am einfachsten kann man die Optimierung machen, wenn man den Phasenstrom per Hallsensor am Oszilloskop sichtbar macht. Es gibt auch eine Applicaton-Note von TI zu diesem Thema ("DRV8711 Decay Mode Setting Optimization", SLVA637), da sind hilfreiche Tipps zu verschiedenen Kurvenverzerrungen drinn. > Deshalb meine Frage ob Mikroschrittbetrieb > die Drehmomentkurve beeinflusst, da in den Datenblättern ausschliesslich > die Drehmomentkurve im Halbschritt angegeben wird und die Resonanzen > meist unterschlagen sind. (Natürlich hängen diese auch vom Aufbau ab, > mich überrascht aber, dass es hier kein Norm für die Vermessung gibt??) Da macht jeder Hersteller seins, je nach Firmenphilosopie wird mehr oder weniger stark geglättet oder mit Dämpfern optimiert. Leider werden auch immer weniger Kennlinien in logaritmischer Darstellung erstellt. Mit freundlichen Grüßen Thorsten Ostermann
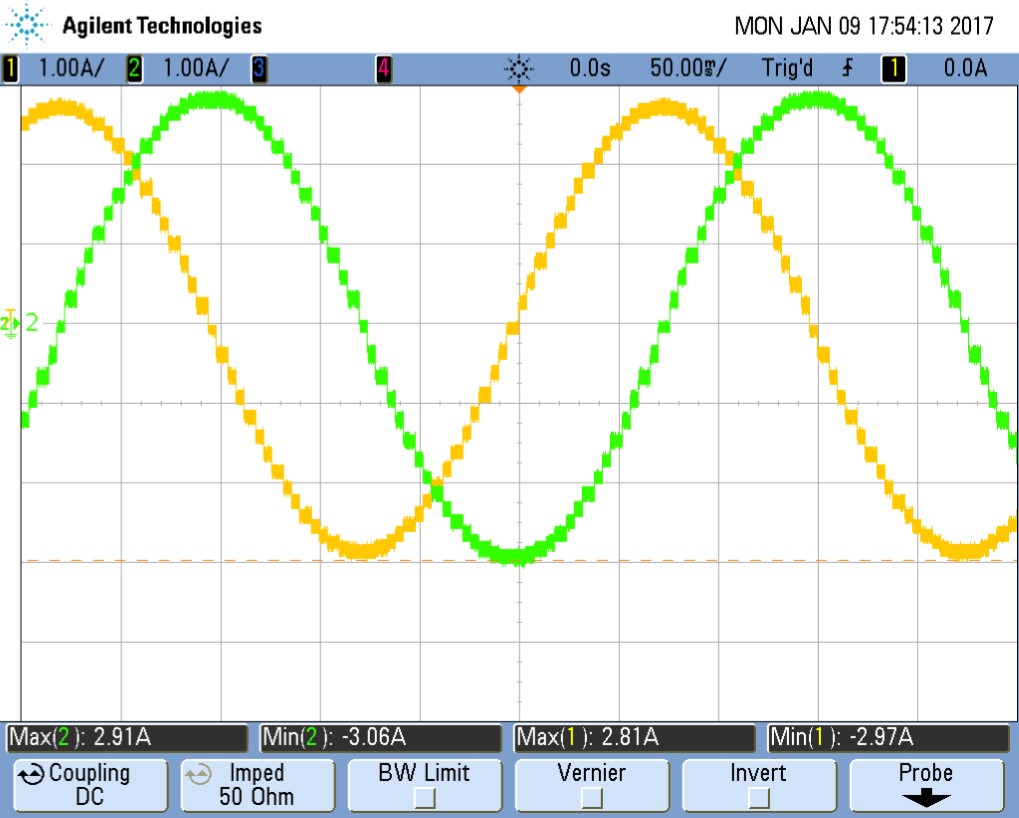
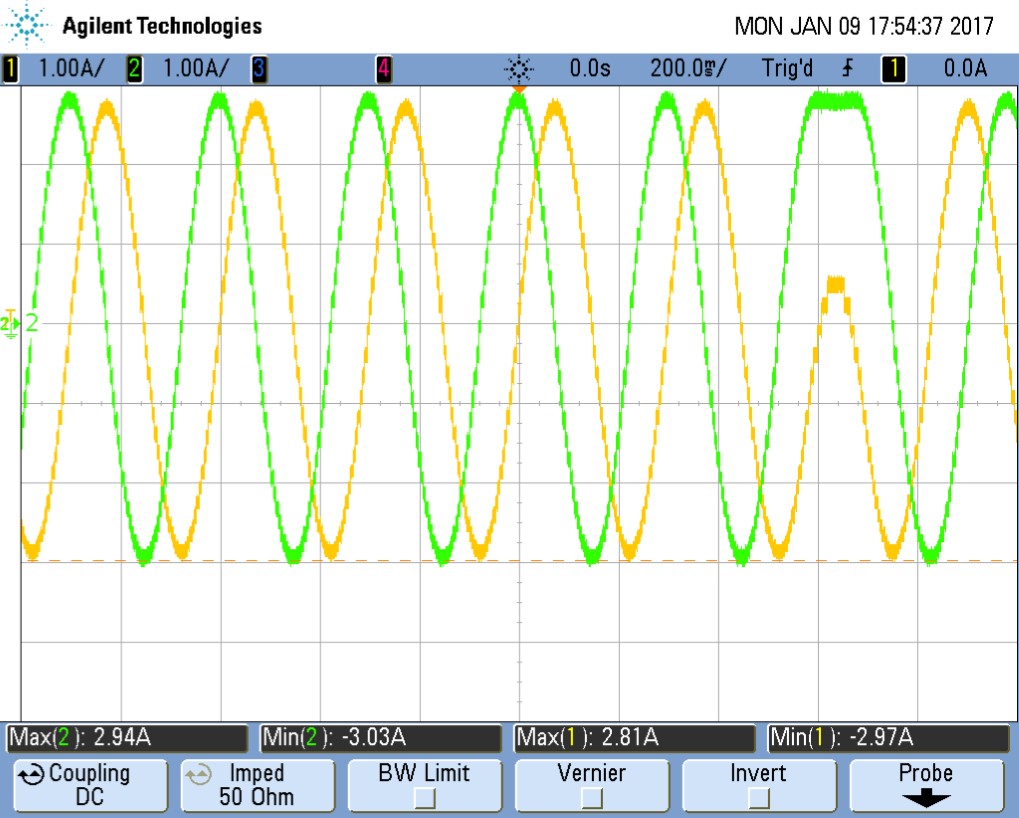
Thorsten O. schrieb: > Probier mal verschiedene Einstellungen für den Decay-Mode (Register > 0x4). Das hat erfahrungsgemäß großen Einfluss auf den Stromverlauf. Ggf. > musst du auch das PWM-Timing anpassen. Hallo Herr Ostermann, Ich hatte zu Beginn die Stromregelungsparameter eingestellt. Ich habe heute beim entsprechenden Betriebspunkt die beiden Phasenströme aufgezeichnet. Sie sind dem Post angehängt. Den beiden Strömen ist nicht anzusehen, dass irgendetwas nicht stimmt. Wenn Sie EMV-Probleme vermuten, würde sie als erstes die Strecke zwischen Treiber und SM verkürzen (also SM-Kabel kürzen)? Wie sind ihre Erfahrungen mit der Hardware des EVALBoards zu den DRV8711-Treibern. Mit freundlichen Grüssen Marco
Hallo Marco, die Ströme sehen absolut sauber aus. Ich sehe da keinen Grund für Positionierfehler. Ich würde mal versuchen, den Motor so anzubauen, das die Umkehrposition des Kolbens möglichst genau auf eine Vollschritt-Position fällt. Und dann die Messung bei verschiedenen Schritteinstellungen wiederholen. Mehr als ein Vollschritt wird die Position doch auch nicht gewandert sein, oder? Mit freundlichen Grüßen Thorsten Ostermann
Bitte melde dich an um einen Beitrag zu schreiben. Anmeldung ist kostenlos und dauert nur eine Minute.
Bestehender Account
Schon ein Account bei Google/GoogleMail? Keine Anmeldung erforderlich!
Mit Google-Account einloggen
Mit Google-Account einloggen
Noch kein Account? Hier anmelden.