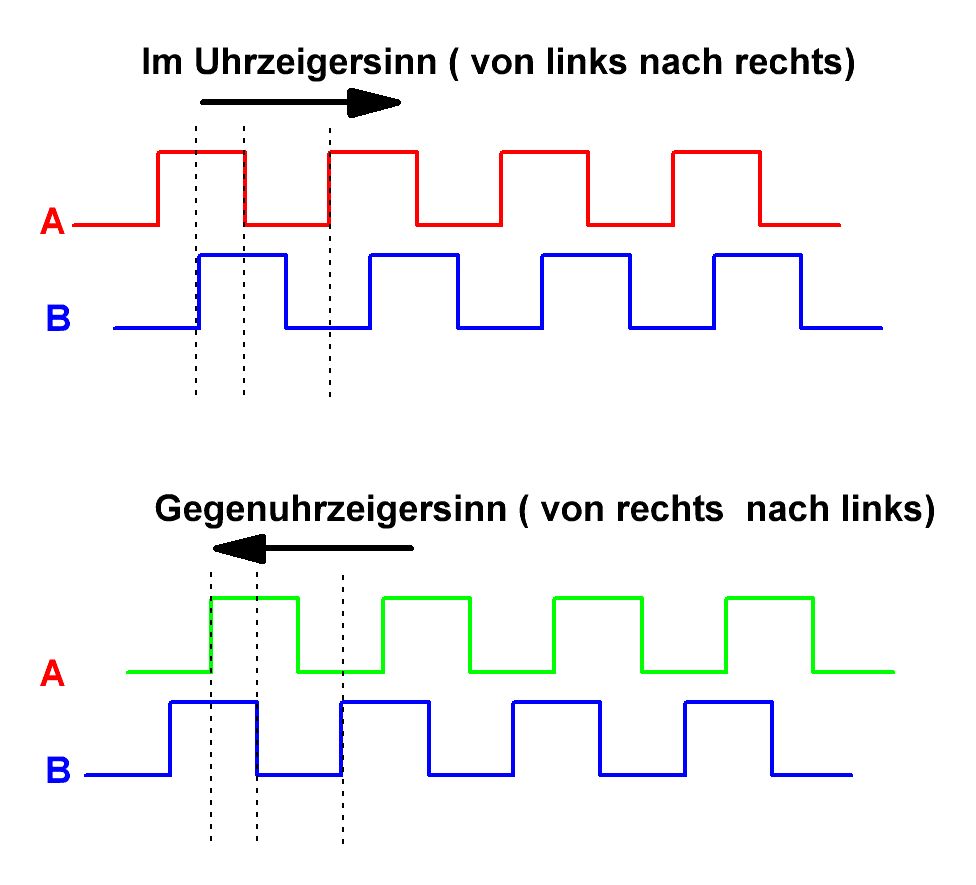
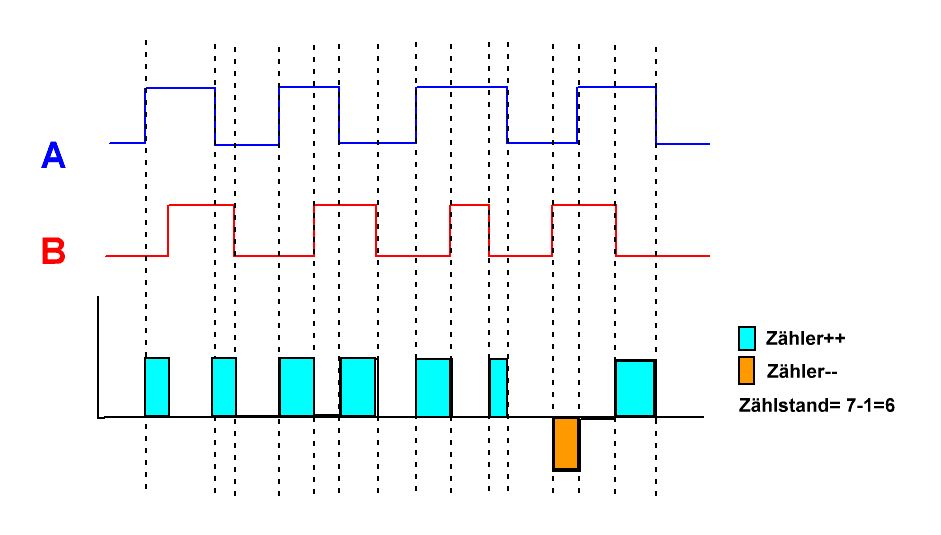
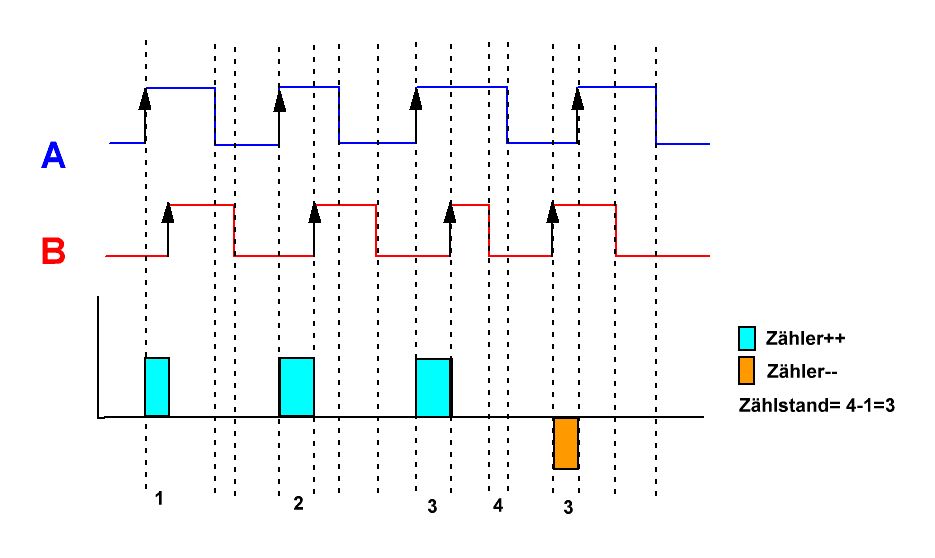
Hallo an alle! Ich möchte gerne einen Hallsensor für die Positionierung benutzen. Dazu muss ich jedoch erst den Encoder Mode richtig verstehen. Meine Wissensstand: Ich bekomme zwei Signale A und B. beide sind phasenverschoben.Wenn A voreilt, habe ich eine Uhrzeigersinn Drehung (links -> rechts). Wenn B voreilt, so habe ich eine gegen Uhrzeigersinn Bewegung ( rechts -> links). So weit, so gut :) Wie würde das jetzt bei einem Zähler aussehen? Ist meine Annahme richtig die ich skizziert habe?
Angehängte Dateien:
-

Encoder_FRAGE.GIF
18 KB -

Encoder_FRAGE_2.GIF
11 KB -

Encoder_FRAGE_3.GIF
11 KB -

Encoder_FRAGE_3.GIF
11 KB
Katerina V. schrieb: > Wie würde das jetzt bei einem Zähler aussehen? Beispielsweise Up-Down-Counter mit A als Clock und B als Richtung
Angehängte Dateien:
-

Encoder_FRAGE_3.GIF
11 KB -

Encoder_FRAGE_3.GIF
11 KB
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
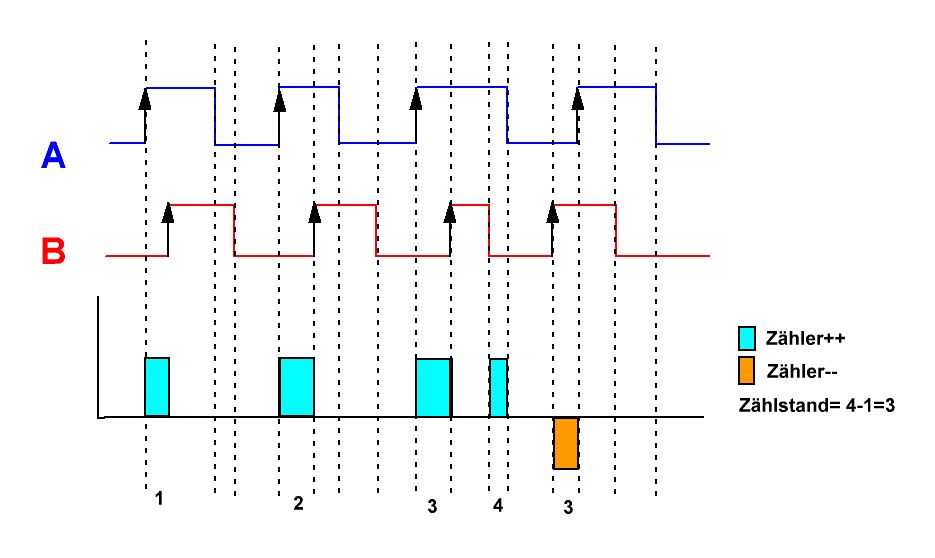
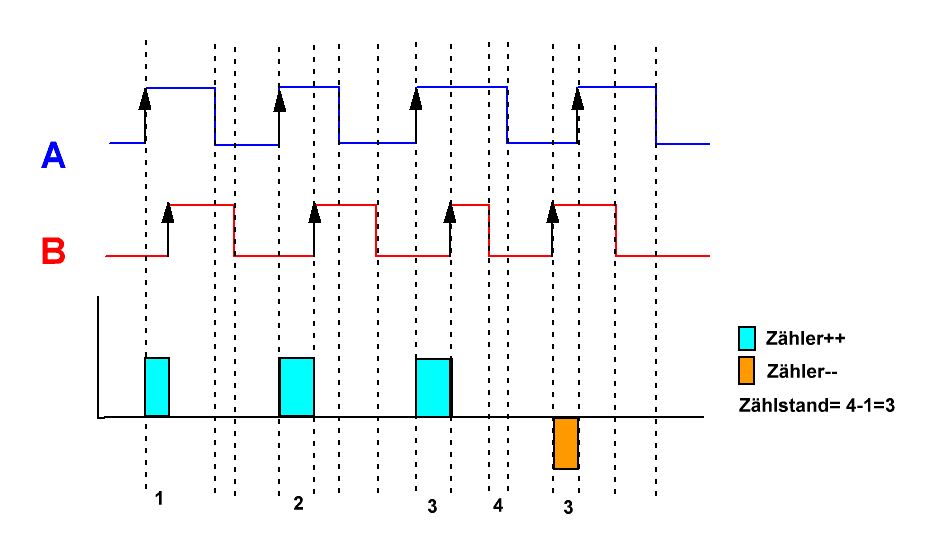
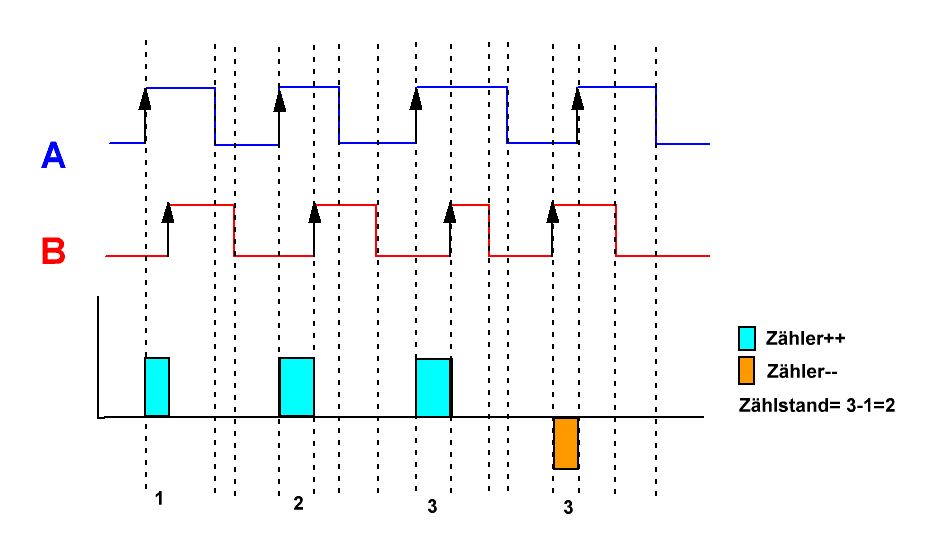
Wäre damit diese Skizze eigentlich richtig? Bei einem "Up-Down-Counter" würde ich dann (siehe Skizze) eine Zählerstand =2 bekommen?
Zur Auswertung von Anzahl und Drehrichtung brauchst du einen Quadraturdecoder. Hier gibt es einen Artikel dazu: http://www.mikrocontroller.net/articles/Drehgeber#Dekoder_mit_diskreten_Logik-ICs Die Sache mit der Entprellerei gilt für Geber mit mechanischen Kontakten, kannst du erstmal überlesen.
Bitte melde dich an um einen Beitrag zu schreiben. Anmeldung ist kostenlos und dauert nur eine Minute.
Bestehender Account
Schon ein Account bei Google/GoogleMail? Keine Anmeldung erforderlich!
Mit Google-Account einloggen
Mit Google-Account einloggen
Noch kein Account? Hier anmelden.