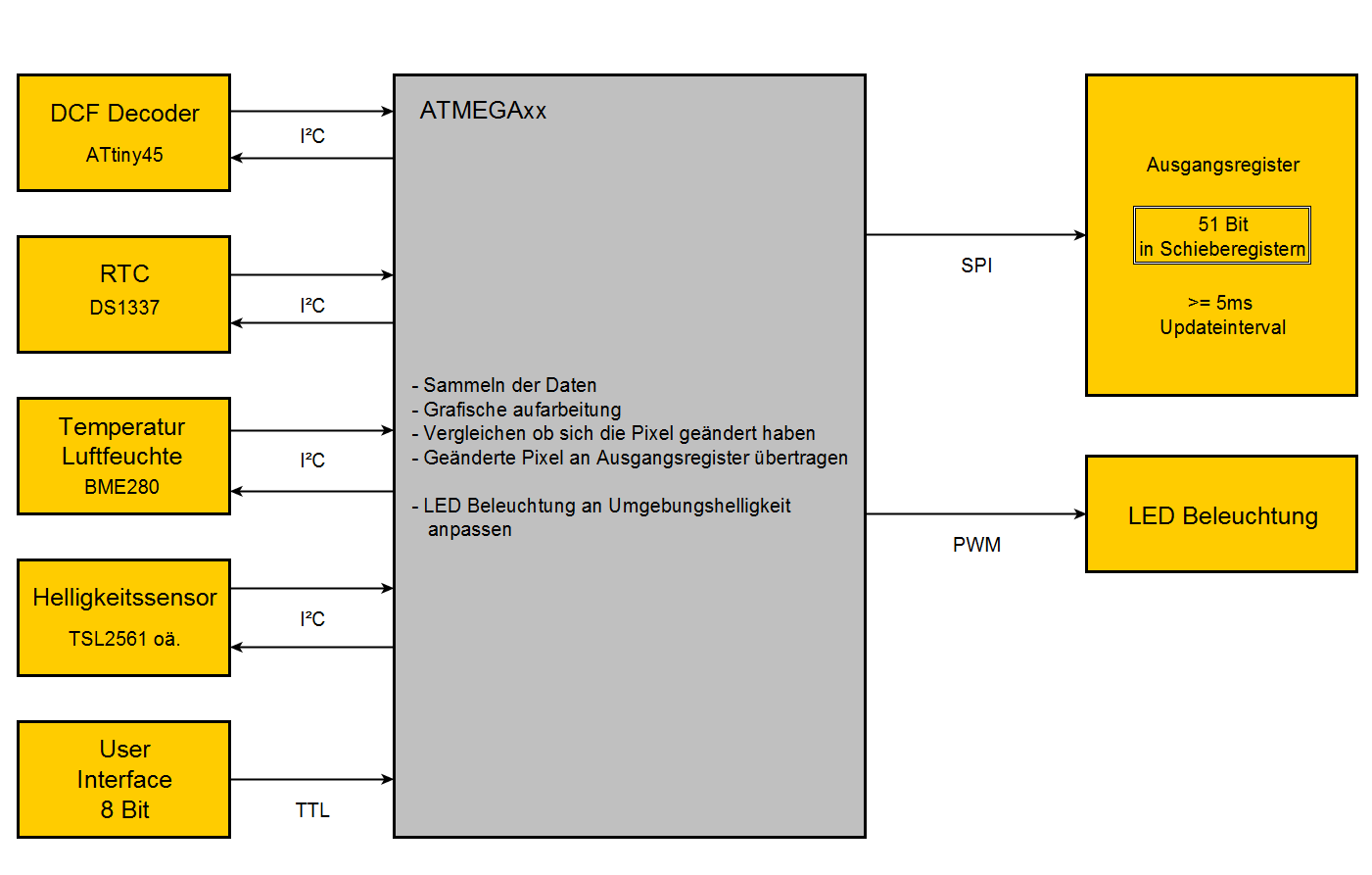
Hallo, hier liegt ein Brose FlipDot und möchte zum leben erweckt werden. Am Ende soll eine Uhr dabei heraus kommen. Aktuell bin ich dabei mir einen Überblick zu verschaffen welche Funktionen das Projekt haben soll. Im Bild seht Ihr was dabei heraus gekommen ist. Die Bauteilbezeichnungen auf der linken Seite sind so noch nicht Final. Das spielt aber erst mal keine Rolle, es soll nur verdeutlicht werden über welche Schnittstelle die Daten dem Chip zugeführt werden. Die I/O Situation ist recht übersichtlich und auch das Timing sehe ich als nicht Kritisch an. Die FlipDots benötigen einige Zeit um gesetzt zu werden. Ich frage mich nach welchen Kriterien ich den Prozessor auswählen soll. Mir fehlt an dieser Stelle einfach die Erfahrung. Bis jetzt nur mit einem MyAVR Board experimentiert. Die Programme waren auch immer recht übersichtlich. Ich kann nicht abschätzen wie viel Code bei diesem Projekt entstehen wird und an welchen Stellen es im Prozessor eng werden könnte. Sicherlich wäre es einfach sich den größten bei Reichelt zu bestellen, der Lernfaktor dabei ist aber gleich 0. Das ganze ist reines Hobby, soll Spaß machen und ich möchte dabei etwas lernen. Daher würde ich mich freuen wenn Ihr mir ein paar Tipps geben könntet auf was ich bei der Prozessor auswahl achten sollte. Lg Flo
Angehängte Dateien:
-

block.png
22 KB
Florian K. schrieb: > Ich frage mich nach welchen Kriterien ich den Prozessor auswählen soll. Jeder geht, deine Anwendung ist langsam und einfach. Florian K. schrieb: > MyAVR Board Kannste nehmen. Ist halt arschteuer aber immerhin USB programmierbar. Ein Arduino wäre billiger.
I2C ist ein Bus. Du brauchst also nicht vier, sondern nur einen davon. Was soll Dein 5msec-Updateintervall bei der das Flipdot-Display ansteuernden SPI-Schnittstelle bedeuten? Was willst Du da in 5msec aktualisieren? Den kompletten Displayinhalt etwa?
Das mit dem I²C ist mir bekannt. Ist vielleicht in wenig unglücklich dargestellt. Die 5ms sind die Totzeit während ein Dot flippt, die Zeit in der nichts passiert und man auf die Mechanik warten muss. Es gibt unterschiedliche Angaben im Internet, zwischen wenigen ms und 200ms hab ich alles gefunden. Das wird am Wochenende mal gemessen, wie viel Zeit wirklich erforderlich ist um ein Dot sicher kippen zu lassen. Es sollen auch nur die Dots gesetzt werden die sich wirklich ändern. Alles andere behält den Zustand von selbst. Dadurch wird der SPI sich ziemlich langweilen und im Prozessor bleibt sehr viel Zeit übrig während eigentlich gar nichts passiert
Mal ein paar andere Anregungen: Mit dem DS1337 wirste nicht viel SPaß haben der ist sehr ungenau. Nimm den DS3231 dank seinem TCXO geht der um einiges genauer. Der BME280 misst nicht wirklich die Umgebungstemperatur sondern die Membrantemperatur des Feuchtesensors zur Kompensation. Siehe hier: Beitrag "China-BME280 Problem" Mit etwas Aufwand kommt man aber nah genug ran. Oder nen LM75 verbauen.
Florian K. schrieb: > Ich frage mich nach welchen Kriterien ich den Prozessor auswählen soll. Zuerst einmal nach der benötigten Peripherie. > Sicherlich wäre es einfach sich den größten bei Reichelt zu bestellen, > der Lernfaktor dabei ist aber gleich 0. Diese Vorgehensweise ist normal. Man sucht sich den Prozessor mit der passenden Rechenleistung, der passenden Bauform, Pinanzahl und Peripherie heraus, nimmt dann für die Entwicklung den mit dem meisten Speicher, und am Ende der Entwicklung schaut man, welches der kleinste Prozessor aus der Serie ist, in den der Code noch hineinpasst. Ggf. wird dann noch etwas optimiert und gequetscht, bis es passt. Bei einem Einzelstück unterbleibt der letzte Schritt halt. fchk PS: Die DCF77-Dekodierung passt auch noch in den Prozessor rein. Die DS3231/DS3232 sind wirklich gut, und für Temperatur/Luftfeuchte habe ich einfach einen AM2302/DHT22 verwendet, der eine bidirektionale 1-Bit Schnittstelle verwendet.
Keine Ahnung, warum da alles über I²C aufbereitet ankommen muss. Eine (DCF-)Uhr hat doch fast NIX zu tun. - DCF-Decodierung: ein digital Input - Temperatur, Feuchte, Helligkeit: je ein ADC-Input und entsprechende Sensoren. - RTC: Überflüssig, wenn ein ausreichend genauer Quarztakt zur Überbrückung von DCF-Störungen vorliegt. (1..2 Pins) - PWM für Beleuchtung: ein PWM-Out - SPI: 4..? Port-Pins? - User Interface: 8 Port-Pins Dürfte eine langweilige Aufgabe für einen ATMega8 sein.
Angehängte Dateien:
-

1cell_stepup.jpg
340 KB -

dicker_rolladen_sender_einzelsteuerung_5_menueseiten_per_encoder.jpg
320 KB -

feuchtemesser.jpg
300 KB -

rolladensteuerung.jpg
320 KB
Jacko schrieb: > Dürfte eine langweilige Aufgabe für einen ATMega8 sein. mir ist zu oft schon ein Arduino nano 328p zu dünne zur Entwicklung nehme ich gene den Arduino mighty mini 1284p http://www.ebay.de/itm/Mighty-Mini-ATMega1284p-compatible-with-Arduino-/331463717483 wenn der Code steht und man abspeckt passt vielleicht auch ein Nano 328p Beitrag "Re: Arduino Pro Micro"
Na dann doch lieber paar gebrauchte Solaris-Server mit 4 Routern der neuesten Generation verknüpfen. Könnte GERADE SO reichen. Overhead? - Kann man nie genug haben! Strom? - Kommt doch aus der Steckdose! Wenn nicht? USV und NEA müssen sich ja auch mal beweisen... ;-)
Jacko schrieb: > Overhead? - Kann man nie genug haben! Sehe ich auch so. Meine Oma hat mir immer gesagt "Viel hilft viel!" Wirtschaftlich muss ich im Hobby zum Glück nicht arbeiten :) Die Frage warum alles über Bus kommen muss ist wirklich berechtigt. Der Grundgedanke war Faulheit. Aber du hast mich gerade davon überzeugt das ganze wirklich per ADC zu machen. Einzig auf die RTC möchte ich nicht verzichten da die Batteriegepuffert laufen soll um nach dem Einschalten nicht auf den Sync zu warten zu müssen. Ob es das 8€ Luxusmodel sein muss, ich denke eher nicht. Sekunden sollen eh nicht angezeigt werden. Vielen dank Euch allen für die Info´s und Anregungen. Die Entscheidung ist gerade auf den 1284p gefallen - viel hilft viel :)
Bitte melde dich an um einen Beitrag zu schreiben. Anmeldung ist kostenlos und dauert nur eine Minute.
Bestehender Account
Schon ein Account bei Google/GoogleMail? Keine Anmeldung erforderlich!
Mit Google-Account einloggen
Mit Google-Account einloggen
Noch kein Account? Hier anmelden.