Ich habe mal den umgekehrten Fall.
Ein Gerät ist mit einem Rotary Encoder ausgerüstet. Da dieser 'nicht in
das Design passt', musst der Encoder mit zwei, resp. drei Tastern
ersetzt werden (Einer für links, einer für rechts, der dritte ist der
Druckknopf)
Es handelt sich um einen klassischen, 5-poligen Encoder mit Druckkontakt
(GND, A, B, GND Taster, Taster).
Ich suche Beispiel Codes für Arduino. Used Cases. Bisher habe ich nur
das gefunden:
1
#include<avr/interrupt.h> //Include the Interrupt Library
2
3
#define T2Speed 50 // Setting the Interrupt Speed?
4
5
constintLED=13;// Setting the pin number for LED as 13?
6
constintchannelA=2;// Setting the pin number for channel A as 2 (Since I have an Arduino Mega I assume this would pin 2 PWM?)
7
constintchannelB=3;// Setting the pin number for channel A as 3
Kennt jemand schönere Ansätze?
Funktion: Mit einem kurzen Tastendruck soll langsam durch das Menu
gescrollt werden können. Bleibt man länger drauf, erhöht sich die
Frequenz. Das Timing muss dann natürlich mit der bestehenden Schaltung
angepasst werden.
Philipp G. schrieb:> Kennt jemand schönere Ansätze?
Wie wäre es mit einem Ansatz, der wenigstens die 2 Taster auswertet (den
mittleren Drucktaster kann man ja direkt weiterleiten) ? Mit entprellen
und damit das Incrementsignal updated ? Oder fehlt es dir völlig an
Programmiererfahrung ?
@ Philipp G. (geiserp01)
>Ich habe mal den umgekehrten Fall.
Kann man machen, man muss halt nur die Tabelle mit Gray-Code
durchlaufen.
>Ich suche Beispiel Codes für Arduino. Used Cases. Bisher habe ich nur>das gefunden:>#include <avr/interrupt.h> //Include the Interrupt Library
Naja, da ist noch viel zu tun, vor allem die Eingabe fehlt!
>Funktion: Mit einem kurzen Tastendruck soll langsam durch das Menu>gescrollt werden können. Bleibt man länger drauf, erhöht sich die>Frequenz. Das Timing muss dann natürlich mit der bestehenden Schaltung>angepasst werden.
Du brauchst eine Tasteneingabe mit Entprellung und Erkennung eines
langen Tastendrucks. Damit dir dann der Gray-Generator gesteuert. Klar
geht das auch mit Switch(), aber eine einfache Tabelle ist hier deutlich
einfacher und übersichtlicher.
Beitrag "Re: pulse direction signal zu encoder a b?"
Für die Entprellung bietet sich der uC Kalssiker von Peter D. an.
https://www.mikrocontroller.net/articles/Entprellung#Komfortroutine_.28C_f.C3.BCr_AVR.29
Falk B. schrieb:> Du brauchst eine Tasteneingabe mit Entprellung und Erkennung eines> langen Tastendrucks. Damit dir dann der Gray-Generator gesteuert.
Danke, aber Unverständnis. Sinn und Zweck des Grey codes ist doch genau,
dass keine Entprellung notwendig ist, oder?
@ Philipp G. (geiserp01)
>> Du brauchst eine Tasteneingabe mit Entprellung und Erkennung eines>> langen Tastendrucks. Damit dir dann der Gray-Generator gesteuert.>Danke, aber Unverständnis.
Hmmm . . .
> Sinn und Zweck des Grey codes ist doch genau,>dass keine Entprellung notwendig ist, oder?
Bei Drehgebereingängen!
Aber die Eingäng deines Emulators, hier der Arduino, sind normale
Tasten!
P S Für so einen Emulator reicht ein kleiner ATtiny13, selbst den kann
man spielend in C programmieren. Ist halt nicht als Arduino-Board
verfügbar.
Philipp G. schrieb:> Danke, aber Unverständnis. Sinn und Zweck des Grey codes ist doch genau,> dass keine Entprellung notwendig ist, oder?
Nicht ganz. Beim Grey-Code kann es natürlich auch zwischen Werten hin-
und her schwanken, aber eben nur zwischen nebeneinander liegenden. Unter
Umständen will man das auch nicht haben.
MaWin schrieb:> mittleren Drucktaster kann man ja direkt weiterleiten) ? Mit entprellen> und damit das Incrementsignal updated ? Oder fehlt es dir völlig an> Programmiererfahrung ?
Nein, gar nicht. Ich wollte nur wissen, ob es eine best practice für
solche Fälle gibt, oder man sich sowas einfach selber zurechtstiefelt.
Ich schau' mir deine links gleich an.
Falk B. schrieb:> Bei Drehgebereingängen!> Aber die Eingäng deines Emulators, hier der Arduino, sind normale> Tasten!
Ja, logisch, Notiz an mich selber, Gehirn einschalten.
Also entprellen, Länge des Drucks auswerten.
n = 800; //ms
If (Tasterpulse > n) then
sendpulses;)
else
sendsinglepulse
HildeK schrieb:> Beim Grey-Code kann es natürlich auch zwischen Werten hin-> und her schwanken, aber eben nur zwischen nebeneinander liegenden
Einer Steuerung macht das nichts aus, wenn sie korrekt ausgelegt ist,
aber eine Anzeige würde in der letzten Stelle hin und her springen, das
sieht halt blöd aus. Dagegen hilft nicht unbedingt Entprellen, wenn der
Encoder genau am Übergang steht, eher eine Hysterese.
Georg
@Philipp G. (geiserp01)
>Nein, gar nicht. Ich wollte nur wissen, ob es eine best practice für>solche Fälle gibt,
Nicht daß ich wüßte, zumal deine Anwendung SEHR exotisch ist. Einen
Drehgeber durch 2 Tasten ersetzen macht man doch bestenfalls für
Behinderte?!?
>Also entprellen, Länge des Drucks auswerten.
So in etwa.
>If (Tasterpulse > n) then> sendpulses;)>else> sendsinglepulse
Naja, ich würde es anders machen. Man nehme eine statemachine,
welche zyklisch im Zeitraster X aufgerufen wird, wobei X die
Puslfrequenz der schnellen Puse bestimmt. Diese FSM bekommt von der
Entprellroutine 2 Eingangssignale. Und zwar Taste wurde gedrückt (Flanke
inaktiv/aktiv) und Taste ist schon lange gedrückt. Bei beiden Signalen
geht die FSM je einen Schritt in die jeweilige Richtung. Das
Flankensignal löscht sich selber in der Entprellroutine, die FSM kann so
oder so nur einen Schritt machen. Das Signal Taste schon länger gedrückt
bleibt aber stehen, bis man losläßt.
Praktisch kann man das alles locker in eine Timer-ISR packen, wobei die
Entprellung bei djedem Aufruf arbeitet (um die 1kHz), die Signalausgabe
aber nur jede X-te ISR, vielleicht Faktor 100 langsamer (macht immer
noch 10 Schritte/s).
Falk B. schrieb:> Nicht daß ich wüßte, zumal deine Anwendung SEHR exotisch ist. Einen> Drehgeber durch 2 Tasten ersetzen macht man doch bestenfalls für> Behinderte?!?
Wüsste ich nicht dass du es bist hätte ich das glatt als Beleidigung
aufgefasst :)
Scherz beiseite. Es handelt sich um eine Konsole mit drei eingebauten
Displays dreier unterschiedlicher Geräte, allesamt mittig und
untereinander angeordnet. Um die Displays herum befinden sich Taster,
links und rechts symmetrisch angeordnet.
Ein Gerät wird nun ersetzt durch ein anderes, welches von Haus aus mit
einem Drehgeber bedient wird. Das stört das Auge; die Symmetrie der
Konsole ginge verloren, man könnte höchstens rechts und links zwei
Drehgeber einbauen, und dies so beschalten dass beide dieselbe Funktion
ausführen, was wohl noch beh... wäre.
Der 'Kunde' will die Bedienung mit den Tastern erhalten.
Falk B. schrieb:> Naja, ich würde es anders machen. Man nehme eine statemachine,> welche zyklisch im Zeitraster X aufgerufen wird, wobei X die> Puslfrequenz der
ok, schaue mir an, danke.
Du brauchst also einen Drehgeberemulator?
Also einen Zähler den man mit den Tasten auf und ab steuern kann und der
vorwärts von wückwarts unterscheiden kann und sich die Drehgeberposition
merkt, also 4 Zustände hat. Beim linksdrehen wird vorwärts geschoben,
beim REchtsdrehen rückwärts.
Ergibt das Muster
0110
1100
0011
0110
1001
0011
1100
1001
Hallo zusammen
Mittlerweile habe ich das Gerät zum Umbau zu Hause. Noch mal von vorne,
damit man sich nicht den gesamten Thread durchlesen muss:
Ausgangslage
Der Rotary Encoder soll durch zwei (drei) Taster ersetzt werden. Für
mich von Relevanz sind nur die zwei Taster welche den 2bit greycode
erzeugen.
@Falk Brunner war so nett und hat obigen Code erstellt, den probiere ich
abends mal aus, nochmals danke an dieser Stelle!
Beim Drehsignalgeber handelt es sich um diesen hier:
https://www.alps.com/prod/info/E/HTML/Encoder/Incremental/EC12E/EC12D1524403.html
Von Relevanz:
Number of pulse 15
Ratings 1mA 5V DC
Output signal Two phase A and B
Max./min. operating current(Resistive load) 10mA/1mA
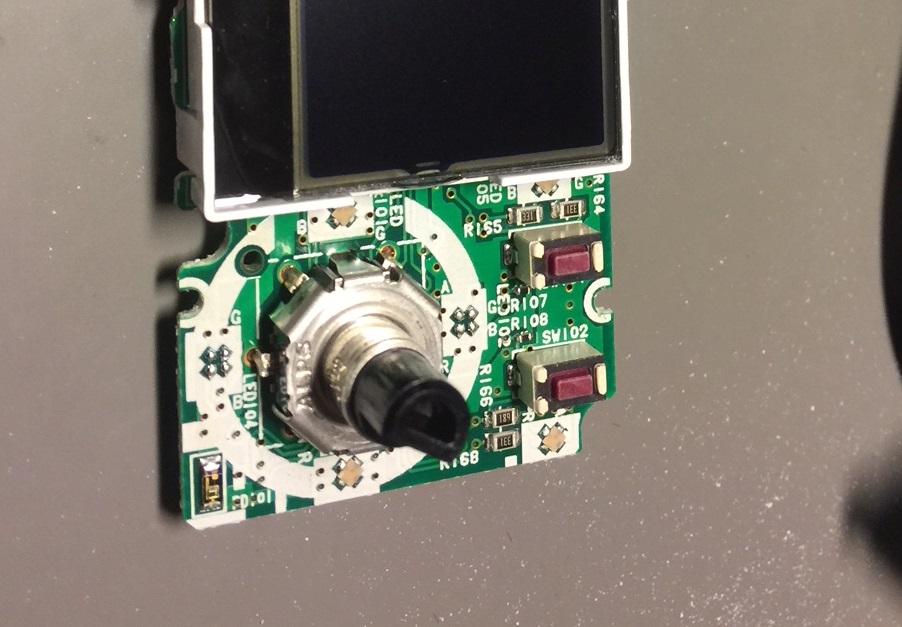
[Bild pcb01_front_enc01.jpg]
-> Der Encoder der ersetzt werden soll
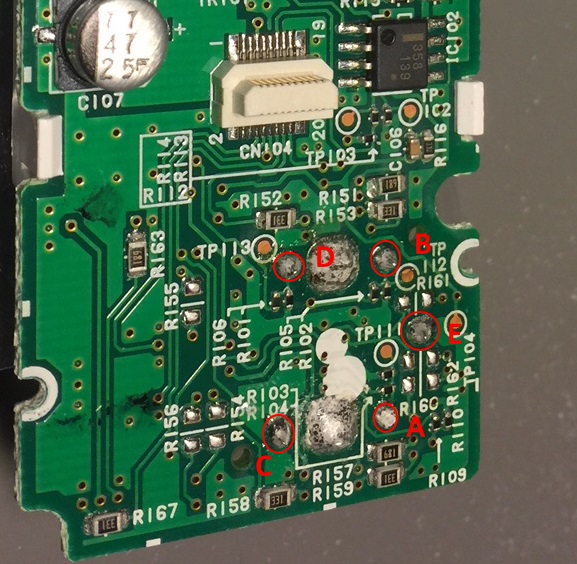
[Bild pcb01_back_enc02.jpg]
- Die 5 Pins des Encoders, man sieht auch schön die beiden R gegen Masse
und Versorgungsspannung
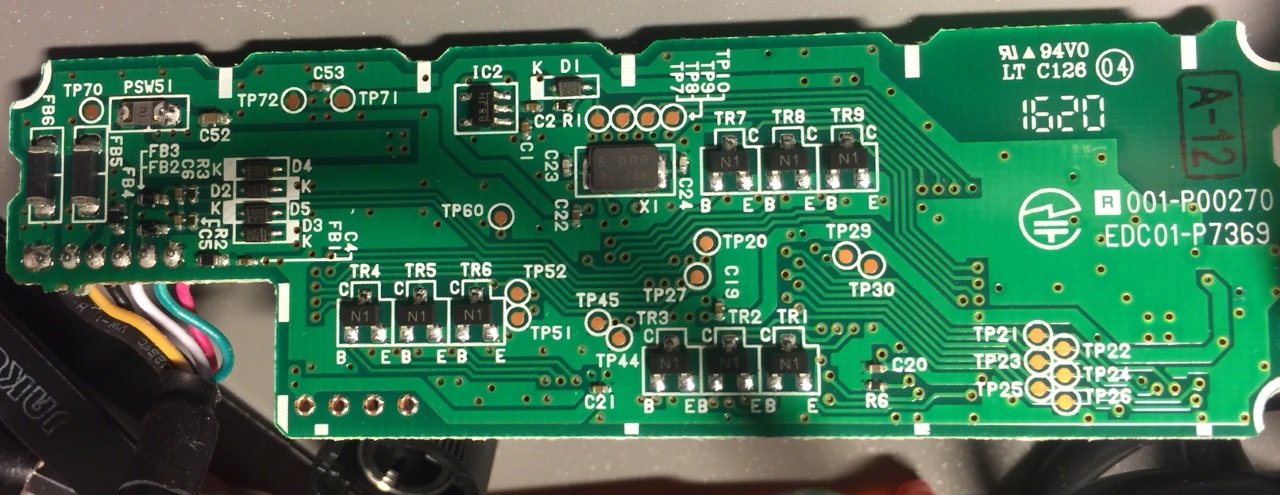
[Bild pcb02_back_enc.jpg]
- Die Rückseite des zweiten Boards
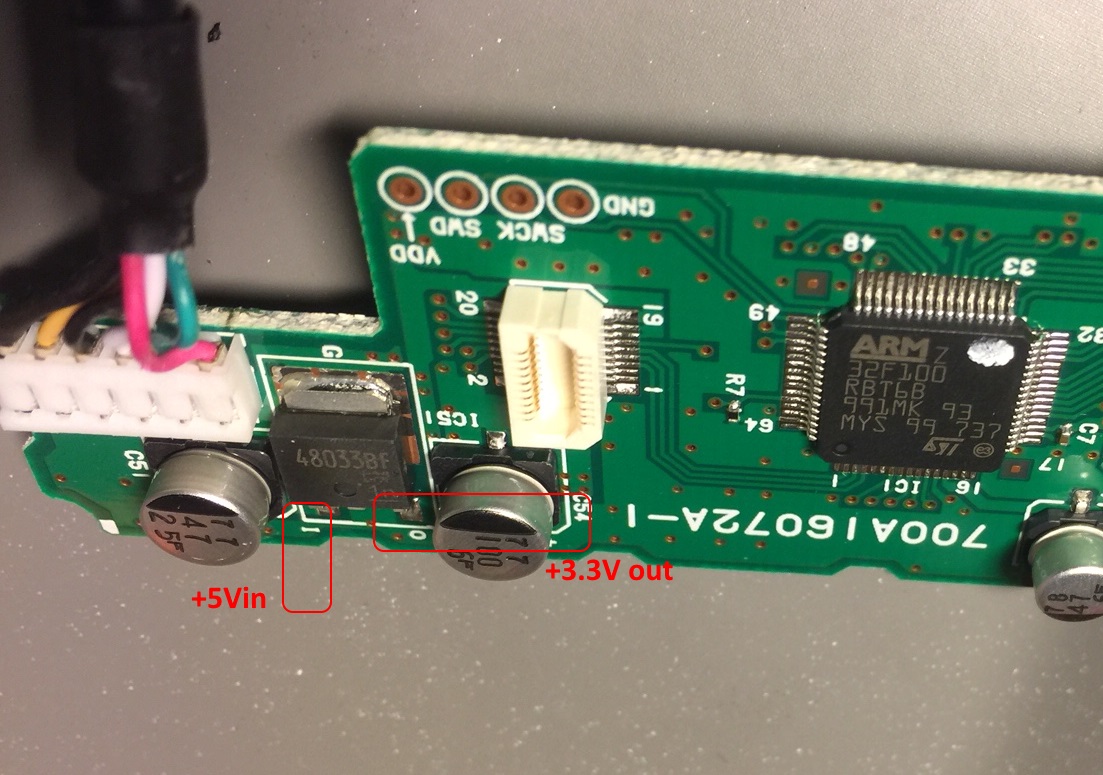
[Bild pcb02_front_enc.jpg]
- Die Front des zweiten Board mit dem Spannungsregulator.
Fragen
Der 2bit Greycode soll von einem Arduino Nano erzeugt werden, weil ich
von diesen 20 Stück zu Hause liegen habe. Versorgungsspannung vom Nano
bei 5V.
[Bild pcb02_front_enc.jpg]
zeigt den Eingang mit 5VDC, danach der Spannungsregler zwischen den
beiden Cs auf 3.3V. Das bedeutet die ganze Platine werkelt mit 3.3V.
Soll/darf/kann ich mit einem 340R Widerstand zwischen Arduino Nano Out
direkt auf die Encoder Pins A und B gehen? ((5 - 3.3) \ 0.005 = 340)?
Ich würde dann die Versorgung von Nano direkt vom Board nehmen (+5V).
Weitere Alternativen:
Spannungsteiler am Ausgang auf 3.3V
Logic Level Shifter
Den Nano kann man auch mit 3,3V laufen lassen. Aber dann muss man den
Takt runter drehen, 16 MHz sind dann nicht mehr erlaubt. Aber
Längswiderstände sind wahrscheinlich einfacher 1K ist OK. Genaugenommen
kann man auch die Ausgänge vom Arduino als Open Drain Treiber nutzen,
dann ist die Drehgeberemulation perfekt, denn die Pull-Ups auf 3,3V sind
schon auf der Platine.
Das erreicht man, indem man auf DDRB anstatt PORTB den invertierten
Gray-Code ausgibt.
// update outputs
DDRB = ( DDRB & ~0x03 ) | (~gray & 0x03);
D.h. die IOs werden zwischen Ausgang mit Wert 0 (PORTB) oder Eingang
umgeschaltet.
>pcb01_back_enc02.jpg
Wenn der LM358 da schon auf 3,3 oder 5V läuft, kann man auch huckepack
einen Tiny13/25/45/85 in SO-8 auflöten, wenn man ihn vorher programmiert
hat. Spart das ganze Nano Dings ein und liegt auch schon nahe am
Drehgeber.
Ich versuche das mal mit opendrain @Falk, wäre sowieso die beste Lösung.
Der Encoder macht ja auch nix anderes.
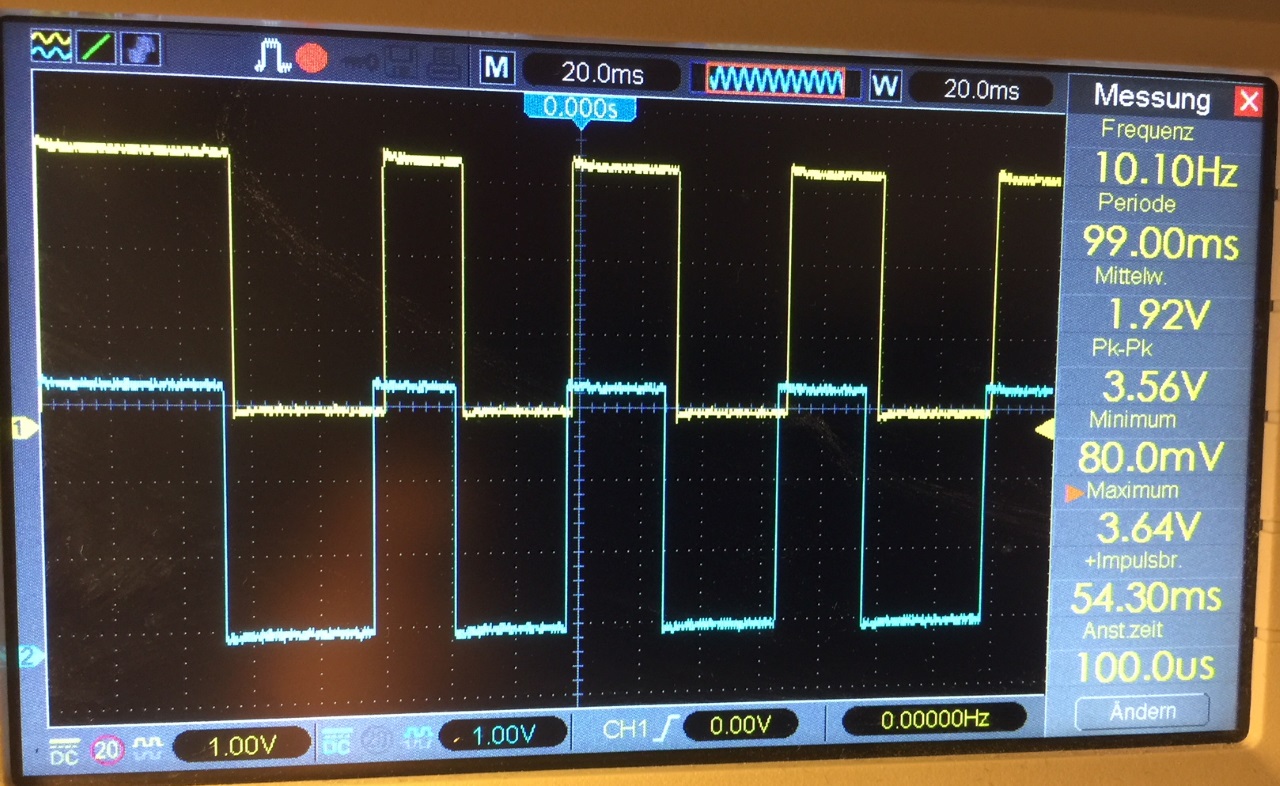
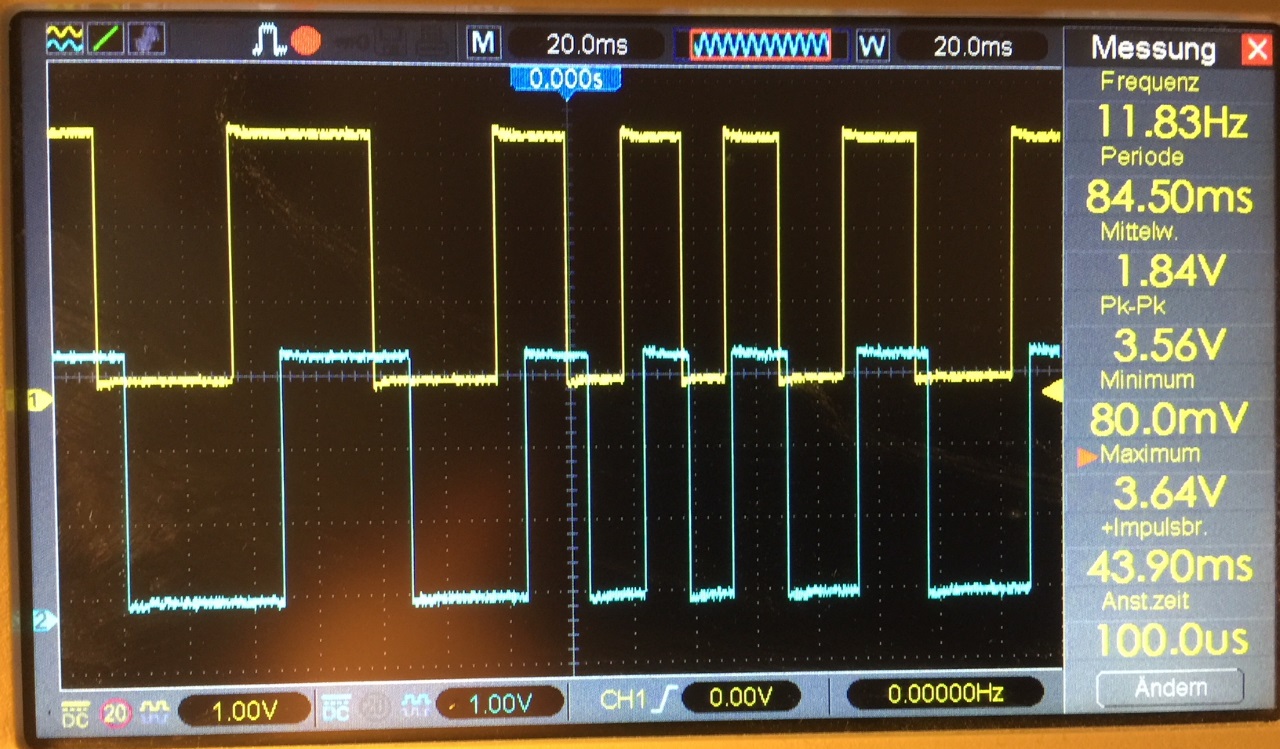
Ich habe gestern Messungen gemacht (Bild). Ich hoffe der Versatz passt
einigermassen. Die Messungen habe ich direkt am PCB gemacht (Kanal 1 =
A, Kanal 2 = B, GND vom PCB.
Vorgehen: 'Von Hand' möglichst schnell und gleichmässig drehen.
Ich muss gestehen das ist die erste Berührung mit Encodern in meinem
Leben, habe null praktische Erfahrung damit.
Der code funktioniert leider nicht wie erwartet.
PB0, Pin 8 Nano
PB1, Pin 9 Nano
Nach den booten sind beide auf low, dann geht einer der beiden auf high
- unabhängig was ich an den Tastereingängen PB3/4 mache.
@ Philipp G. (geiserp01)
>Der code funktioniert leider nicht wie erwartet.
Der Code ist auch für einen nackten Attiny13 geschrieben, nicht Arduino
Nano. Schau dir an, wo die entpsprechenden Pins liegen.
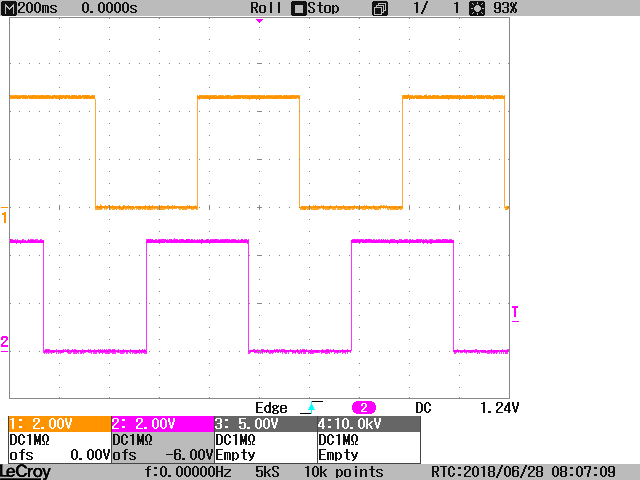
Also ich hab das Programm jetzt mal real auf dem ATtiny13 getestet, es
läuft wie es soll. Der einzige Fehler war, daß ich die ISR mit 1kHz
anstatt 100Hz hab laufen lassen, da sind die Signale im Automatikmodus
halt um Faktor 10 zu schnell ;-)
Siehe Anhang, jetzt mit 100Hz ISR und Screenshot.
Die Taster sind normale Schließer, welche gegen GNG schalten. Man
braucht keine externen Pull-Up Widerstände, die internen im AVR reichen
hier.
Danke Falk. Hätte früher berichten sollen, es funktioniert alles. Dass
das Timing nicht stimmt, habe ich schnell gemerkt.
Ich habe mir hinter '2bit greycode' viel zu viel vorgestellt, eigentlich
ist das simple - zumindest mit 2 bit.
Interessant wäre das jetzt rein analog zu lösen, evtl. mit zwei NE555
oder dem 556.
Gruss, Philipp