Hallo Leute, Wir haben in der Schule ein Aufgabe bekommen. Dort geht es dadrum, dass wir einen Motor regeln sollen, so dass die Drehzahl unabhängig von der Last ist. Durch unsere Recherche sind wir auf diese PDF gestoßen (https://files.elv.com/service/manuals/Drehzahlreglung/36620-Drehzahlregelung.pdf), jedoch sollen wir statt der PWM die hier benutzt wird, einen Transistor im Linearbetrieb betreiben (dadurch wird natürlich Abwärme erzeugt). Die Information zur Ist Drehzahl liefert uns eine Spannung, die im Bereich von 0 bis 5 Volt arbeitet. Unser Ansatz ist es das wir die Soll Drehzahl und die Ist Drehzahl in einem Nichtinvertierendem Verstärker (mit Offsetspannung) geben, und dieser steuert dann unseren Leistungstransistor. Hat jemand einen Ansatz von euch wie sowas mit OP's realisiert werden könnte ?
Hallo Thomas, baut einfach einen Differenzverstärker mit einem OP auf. https://www.elektronik-kompendium.de/sites/slt/0210153.htm Soll und Ist an die beiden Eingänge, Transistor mit Basiswiderstand an den Ausgang. Dann habt ihr einen einfachen P-Regler und der sollte genügen :-) Eventuell die Verstärkung über ein Poti einstellbar machen um ein wenig probieren zu können. Viel Erfolg! :-)
Super vielen Dank, das hört sich aber sehr einfach an :-D Aber bei dem Differenzverstärker bekomme ich doch nur eine Differenz der Soll Ist Spannung inklusive Verstärkung. Wie kommt denn dort die Reglung zustande ?
Thomas schrieb: > Aber bei dem Differenzverstärker bekomme ich doch nur eine Differenz der > Soll Ist Spannung inklusive Verstärkung. Wie kommt denn dort die Reglung > zustande ? Dadurch, dass die gewählte Verstärkung hoch genug ist. Bei einem P-Regler bleibt natürlich immer ein Fehler (=Regelabweichung), den man mit einem I-Anteil verkleinern kann. Die Kunst der Dimensionierung von Verstärkung (P-Anteil) und I-Anteil ist, die Regeleigenschaften zu optimieren ohne dass der Regelkreis schwingt.
Vielen Dank für die Antworten, damit könnn wir weiter arbeiten. :-)
Thomas schrieb: > Durch unsere Recherche sind wir auf diese PDF gestoßen Die Schaltung regelt die Drehzahl durch Auswertung der Gegen-EMK, also der vom Motor im Leerlauf erzeugten Generatorspannung, die drehzahlabhängig ist. Beitrag "Drehzahlregler für DC-Motor, ATmega48-328" Der Motor darf bei der Methode also nicht dauernd an Spannung hängen, wie bei euch. Thomas schrieb: > Die Information zur Ist Drehzahl liefert uns eine Spannung, > die im Bereich von 0 bis 5 Volt arbeitet. Habt ich einen extra Drehzahlsenor, einen Tachogenerator ? Thomas schrieb: > Unser Ansatz ist es das wir die Soll Drehzahl und die Ist Drehzahl in > einem Nichtinvertierendem Verstärker (mit Offsetspannung) geben, und > dieser steuert dann unseren Leistungstransistor. Hat jemand einen Ansatz > von euch wie sowas mit OP's realisiert werden könnte ? Kann wohl keine Drehzahlregelung, sondern nur eine Laststabilisierung sein, wie in https://www.precisionmicrodrives.com/application-notes/ab-026-sensorless-speed-stabiliser-for-a-dc-motor "Die Mitkopplung muss aber immer kleiner als 1 sein sonst schwingt die Regelung."
Angehängte Dateien:
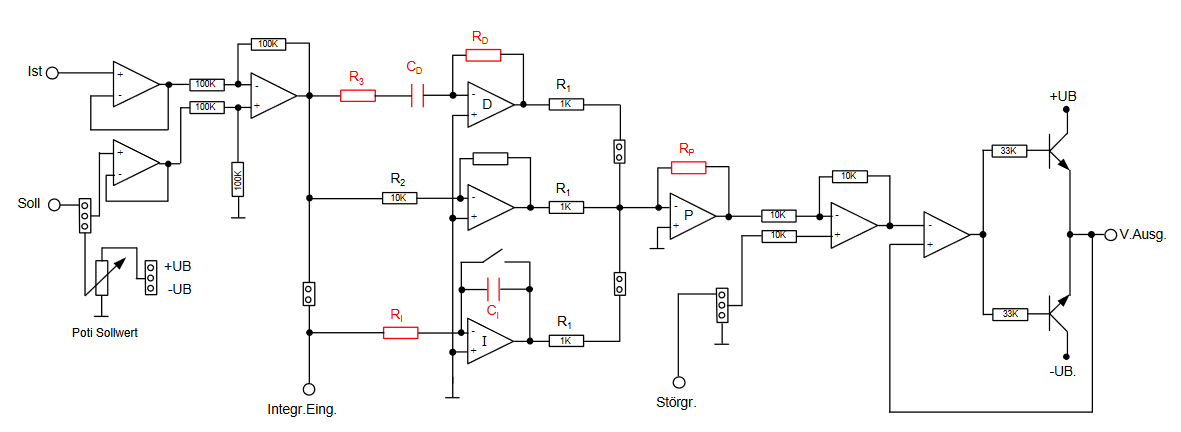
Michael B. schrieb: > Habt ich einen extra Drehzahlsenor, einen Tachogenerator ? Ja genau... Ich habe in dieser PDF solch einen Regler gefunden (http://www.hit-karlsruhe.de/hit-mic/projekte/balanceakt/PIDReglerPlatine.pdf). Dort ist das Schaltbild was ich angehägt habe dabei. In dem ersten Teil sind die OP's ja dazu da um das Signal nicht zu belasten. In dem zweiten Teil ist der berüchtigte Differenzverstärker mit einer Verstärkung von 1. Wofür sind denn da nochmal die anderen PID glieder, vor allem das P-Glied. Hätte man sich denn nicht sparen können und die Verstärkung schon im Differenzverstärker einstellen können?
Thomas schrieb: > Wofür sind denn da nochmal die anderen PID glieder, > vor allem das P-Glied. Damit der Regler an die Trägheit des Motors anpassbar ist und nicht schwingt. Die Schaltung ist aber nicht elegant. Die weitere Störgrösse und der hochgradig nichtlineare (Totregion) Ausgangstreiber machen es nicht besser.
Wäre das funktionsprinzip den auch gegeben, wenn nur der Differenzverstärker da gewesen wäre (rein Theoretisch) ? Und noch mal zur letzten Frage. Hätte man sich nicht das P-Glied sparen könne, da ja schon beim summierer die Verstärkung bestimmt werden kann ?
Thomas schrieb: > Wäre das funktionsprinzip den auch gegeben, wenn nur der > Differenzverstärker da gewesen wäre (rein Theoretisch) ? Ein PID-Regler hat ein anderes Verhalten, als ein P-Regler.
Thomas schrieb: > Wäre das funktionsprinzip den auch gegeben, wenn nur der > Differenzverstärker da gewesen wäre (rein Theoretisch) ? Nein, es schwingt sich auf, die Drehzahl wird NICHT konstant sein sondern schlimmer als ohne Regelung.
Michael B. schrieb: > Nein, es schwingt sich auf, die Drehzahl wird NICHT konstant sein > sondern schlimmer als ohne Regelung. Pauschal würde ich das so nicht sagen...
Thomas schrieb: > Michael B. schrieb: >> schwingt > > Wodurch kommt denn solch eine Schwingung zustande ? Stell dir vor, du stehst unter der Dusche und willst angenehm warmes Wasser, sagen wir 40°C. Du spielst den P-Regler mit einer extrem hohen Verstärkung. Du machst die Dusche an, fühlst das Wasser und stellst fest: "Zu kalt!". Ergo drehst du das Wasser wärmer. Da deine Vorgabe aber eine hohe Verstärkung der Temperaturdifferenz ist, knallst du den Wasserhahn ganz nach rechts und das Wasser wird auch schnell wärmer, bis es gerade über deine gewünschten Temperatur ist - folglich knallst du den Wasserhahn ganz nach links. Und so weiter und so fort.
Stefan S. schrieb: > Stell dir vor, du stehst unter der Dusche und willst angenehm warmes > Wasser, Gutes Beispiel.. Und wie man sieht, entscheidet die "Feinfühligkeit" der Hand am Mischer, ob man sich abwechselnd verbrennt und friert, oder ob man eine angenehme Temperatur eingestellt bekommt. Bei einem P-Regler wäre das die Konstante Kp, die richtig zu dimensionieren ist.
Stefan S. schrieb: > Stell dir vor, du stehst unter der Dusche und willst angenehm warmes > Wasser, sagen wir 40°C. Du spielst den P-Regler mit einer extrem hohen > Verstärkung. Du machst die Dusche an, fühlst das Wasser und stellst > fest: "Zu kalt!". Ergo drehst du das Wasser wärmer. Da deine Vorgabe > aber eine hohe Verstärkung der Temperaturdifferenz ist, knallst du den > Wasserhahn ganz nach rechts und das Wasser wird auch schnell wärmer, bis > es gerade über deine gewünschten Temperatur ist - folglich knallst du > den Wasserhahn ganz nach links. Und so weiter und so fort. Das ist ein Super beispiel, jetzt habe ich es verstanden. Jedoch wurde oben erwähnt, dass wenn ich denn Differenzverstärker nehme, ich dann auch sofort ein P-Glied habe. Sind dann in der Schaltung zwei P-Glieder? Und wenn ja, warum genügt einer nicht ?
Thomas schrieb: > Jedoch wurde oben erwähnt, dass wenn ich denn Differenzverstärker nehme, > ich dann auch sofort ein P-Glied habe. Sind dann in der Schaltung zwei > P-Glieder? Und wenn ja, warum genügt einer nicht ? Du musst die Differenz zwischen dem Ist-Wert und dem Soll-Wert bilden. Wasser hat aktuell 35 Grad, soll aber 40 Grad haben. Also 5 Grad Differenz. Ein P-Regler verstärkt diese Differenz mit dem Faktor Kp. Also z.B. 0.2 Das würde im konkreten Fall bedeuten: 5 Grad Differenz --> Erhöhung um 5*0.2 = 1 Grad Dann: 4 Grad Differenz --> Erhöhung um 4+0.2 = 0,8 Grad etc... So nähert man sich langsam dem Sollwert an. Und man sieht, dass man ihn nie erreichen kann. Das ist dann die bleibende Regelabweichung, was eine Eigenschaft des P-Reglers ist. Bei einem Differenzverstärker kann der Verstärkungsfaktor eingestellt werden. Das entspricht dann dem Kp. Damit kann er sowhl die Differenz bilden, als auch diese gleich verstärken. Ergänzend: D und I Anteile "verrechnen" die Regelabweichung anders. Multiplizieren sie also nicht nur mit einer Konstanten. Damit kann eine bleibende Regelabweichung ausgeglichen werden, die Dynamik des Reglers eingestellt werden usw. P, I und D Anteile haben jeweils eigene Konstanten Kp, Ki, Kd mit denen die Anteile dieses Regelverhaltens "gewichtet" werden. Am Ende werden alle Anteile aller Relgeranteile von P, I und D addiert und geben die Stellgröße.
Für das Beispiel der Dusche: Soll: 40 Grad Ist: 20 Grad. D-Anteil des Reglers sorgt dafür, dass erstmal in überproportional stark die Temperatur erhöht wird. (Mehr, als der P-Anteil zulassen würde). Ist die Regelabweichung kleiner, so wird der D-Anteil des Reglers unrelevanter und es wird langsamer die Temperatur erhöht. Und irgendwann greift der I-Anteil und sorgt für das exakte ausregeln der Temperatur. Langsam, aber präzise.. Das ist jetzt natürlich sehr vereinfacht dargstellt, aber vielleicht kann man es sich so vorstellen. Nichts anderes machst du, wenn du unter der Dusche stehst: Haut stellt fest: Brrrr Arschkalt Hirn sagt: ich will es warm haben: Hand schiebt erstmal zackig den Hebel rüber (D-Anteil) Dann meldest Haut... schon besser.. Die Hand verlangsamt ihre Bewegung. Und irgendwann regelst du langsam in kleinen stufen um die Idealtemperatur herum (I-Anteil) Du selbst bist also der PID-Regler, wenn du unter der Dusche stehst ;-)
Ok, jetzt kommen wir der Sache etwas näher :-). Das bedeutet, wenn ich bei dem Differenzverstärker die Widestände anders dimensioniert hätte, dann hätte ich in dem Schaltbild zwei P-Glieder ?
Thomas schrieb: > Das bedeutet, wenn ich bei dem Differenzverstärker die Widestände anders > dimensioniert hätte, dann hätte ich in dem Schaltbild zwei P-Glieder ? Richtig!
Hätte ich nicht sogar drei P-Glieder ? Einmal beim Differenzenverstärker, dann in der Mitte, und dann noch beim Addierer ?
Allerdings würdest du, wenn du Kp bereits beim Bilden der Differenz mit einfließen lässt, als Eingangsgröße für D und I bereits die mit Kp gewichtete Regelabweichung erhalten. Aber wenn du nur einen P-Regler willst, dann hast du in der Tat erst mit Faktor 1 multipliziert und dann mit Faktor x
Thomas schrieb: > Hätte ich nicht sogar drei P-Glieder ? Genau genommen ja.. Aber das gilt nur, wenn du einen REINEN P-Regler baust.
Thomas schrieb: > Hätte ich nicht sogar drei P-Glieder ? > Einmal beim Differenzenverstärker, dann in der Mitte, und dann noch beim > Addierer ? Da interessiert nur die Gesamtverstärkung, also die Summe der Verstärkungen aller Stufen.
Bitte melde dich an um einen Beitrag zu schreiben. Anmeldung ist kostenlos und dauert nur eine Minute.
Bestehender Account
Schon ein Account bei Google/GoogleMail? Keine Anmeldung erforderlich!
Mit Google-Account einloggen
Mit Google-Account einloggen
Noch kein Account? Hier anmelden.