Hallo, ich betreibe einen billigen China-Schrittmotor (23HS8840D8P1-C) mit einem billigen China-Treiberboard (TB6600). Der Schrittmotor hat ein Haltemoment von 2,2 Nm. Mit einer Federwaage nachgemessen stimmt das auch so ungefähr. Sobald ich den Schrittmotor aber laufen lasse (auch gaaanz langsam mit ca. 1 Step/s), hat er überhaupt keine Kraft (Drehmoment so ca. 20% vom Haltemoment). Versorgungsspannung ist 36V, der Treiber ist auf Vollschritt eingestellt. Auch wenn ich zu dem Schrittmotor keine Drehmomentkurve gefunden habe, scheint mir das nicht normal zu sein. Liegt das am Schrittmotor oder am Teiber? Danke
Wie mißt Du das Drehmoment? Wird der Motor stromgesteuert?
Andreas B. schrieb: > Wie mißt Du das Drehmoment? Auch mit der Federwaage. Natürlich nur so ungefähr im Anlauf. Ich belaste den Motor mit so ca. 0,4 Nm im Stillstand (das hält er natürlich ohne weiteres) und versuche dann, ihn ein paar Schritte machen zu lassen. Dabei rutsch er sofort durch. > Wird der Motor stromgesteuert? Der TB6600 sollte das so machen. Eingestellt sind ca. 3A.
Frank H. schrieb: > Natürlich nur so ungefähr im Anlauf. Ich > belaste den Motor mit so ca. 0,4 Nm im Stillstand (das hält er natürlich > ohne weiteres) und versuche dann, ihn Unter diesen Bedingungen hat er nicht das volle Drehmoment. Du mußt umgekehrt, von der normalen Drehzahl ausgehend, den Motor stoppen.
Andreas B. schrieb: > Unter diesen Bedingungen hat er nicht das volle Drehmoment. Du mußt > umgekehrt, von der normalen Drehzahl ausgehend, den Motor stoppen. Dh. das Verhalten ist "normal" und wäre auch mit Marken-Schrittmotoren und Marken-Treibern nicht anders? Meine Anwendung wäre eine Art Servo, der meist an einer Stelle fest steht, aber eben auch mal ein bisschen hin und her verstellen muss. Dafür müsste er natürlich gerade beim Anlaufen/Verstellen (also bei den ersten Schritten nach dem Halten) das größte Drehmoment haben. Schnell drehen müsste er sich nicht.
Frank H. schrieb: > Meine Anwendung wäre eine Art Servo, der meist an einer Stelle fest > steht, aber eben auch mal ein bisschen hin und her verstellen muss. Dafür ist ein Schrittmotor nicht der geeignete Antrieb.
Alex G. schrieb: > Wieso nimmst du dann keinen Servo? Weil der ein (meist mehrstufiges) Getriebe hat und dadurch stromlos manuell sehr schwer zu bewegen ist. Für meine Anwendung muss man aber den Servo abschalten und dann manuell steuern können.
Andreas B. schrieb: > Frank H. schrieb: >> Natürlich nur so ungefähr im Anlauf. Ich belaste >> den Motor mit so ca. 0,4 Nm im Stillstand (das hält >> er natürlich ohne weiteres) und versuche dann, ihn > > Unter diesen Bedingungen hat er nicht das volle > Drehmoment. Nachvollziehbare Begründung bitte.
Egon D. schrieb: > Nachvollziehbare Begründung bitte. Kannst Du in jedem DB eines Steppers sehen: Das Drehmoment steigt mit der Drehzahl und ist beim Stillstand am niedristen.
Das ist totaler Quatsch. Drehmoment ist bei niedrigen Rpm am größten und fällt bei hohen Drehzahlen ab. Einfach mal bei Nanotec vorbei schauen
Frank H. schrieb: > ich betreibe einen billigen China-Schrittmotor > (23HS8840D8P1-C) mit einem billigen China-Treiberboard > (TB6600). Der Schrittmotor hat ein Haltemoment von > 2,2 Nm. Mit einer Federwaage nachgemessen stimmt das > auch so ungefähr. Sobald ich den Schrittmotor aber > laufen lasse (auch gaaanz langsam mit ca. 1 Step/s), > hat er überhaupt keine Kraft (Drehmoment so ca. 20% > vom Haltemoment). Versorgungsspannung ist 36V, der > Treiber ist auf Vollschritt eingestellt. Das ist komisch. Im Vollschrittbetrieb sind ja immer beide Phasen bestromt; wenn ein "Schritt" gemacht werden soll, wird eine der Phasen umgepolt. Die Kraft sollte somit nie -- auch nicht kurzzeitig -- unter 50% absinken (die gerade umgepolte Phase ist ja mal einen kurzen Moment stromlos). > Auch wenn ich zu dem Schrittmotor keine Drehmomentkurve > gefunden habe, scheint mir das nicht normal zu sein. Das denke ich auch. Bei SEHR langsamer Kommutierung (=extrem geringen Dreh- zahlen) spielen die Induktivitäten praktisch keine Rolle; also MUSS meiner Meinung nach ein Drehmoment von deutlich über 50% erreichbar sein. Wenn das nicht so ist, fließt zumindest kurzzeitig mal zu wenig Strom, so dass der Motor außer Tritt fällt. > Liegt das am Schrittmotor oder am Teiber? Ich tippe auf den Treiber oder die Ansteuerung. Wenn Du eine passende Spannungsquelle und zwei zweipolige Kippschalter hast, müsst man den Motor eigentlich auch von Hand ansteuern können: Zwei Vollbrücken mit den Schaltern aufbauen und von Hand nacheinander durchschalten. Dann müsste sich zeigen, ob meine Behauptungen über das Drehmoment stimmen.
Andreas B. schrieb: > Egon D. schrieb: >> Nachvollziehbare Begründung bitte. > > Kannst Du in jedem DB eines Steppers sehen: Das > Drehmoment steigt mit der Drehzahl und ist beim > Stillstand am niedristen. Besorgniserregend.
Frank H. schrieb: > [...] einem billigen China-Treiberboard (TB6600). Ach so, Nachtrag: Ich könnte mir ein EMV-Problem vorstellen, je nachdem, wie sachgerecht das Board entwickelt wurde. Wenn der Stromchopper die Steuer- eingänge stört, kann wildes und unerklärliches Zeug passieren. Schlechte Masse und schlecht abgeblockte Betriebs- spannung ist für bestimmt die Hälfte aller "un- erklärlichen" Probleme verantwortlich. Die Verkabelung zählt da auch dazu.
Cab_leer schrieb: > Das ist totaler Quatsch. Drehmoment ist bei niedrigen Rpm am > größten und > fällt bei hohen Drehzahlen ab. Einfach mal bei Nanotec vorbei schauen Egon D. schrieb: > Besorgniserregend. Sorry, da habe ich mich vertan. Machen wir die Erklärung anders: Wenn der Motor bestromt steht, dann ist die Achse so ausgerichtet, daß die Anker dem Magneten am nächsten stehen. Hier braucht man also das höchste Drehmoment, um die Achse aus der Ruhelage von außen zu drehen. Das ist das Haltmoment. Versuche ich jetzt aus dieser Position her die Achse mit dem Drehfeld zu drehen (also wie der TO das Drehmoment messen möchte), dann sind die bestromten Anker etwas weiter (und zwar mit der maximal möglichen Entfernung) weg vom Magneten wie vorher, damit nimmt aber auch die magnetische Kraft ab. Mißt man das Drehhmoment bei laufenden Motor, dann wird man im Durchschnitt nicht diese Extremsituation vorfinden.
Andreas B. schrieb: > Wenn der Motor bestromt steht, dann ist die Achse so > ausgerichtet, daß die Anker dem Magneten am nächsten > stehen. Hier braucht man also das höchste Drehmoment, > um die Achse aus der Ruhelage von außen zu drehen. > Das ist das Haltmoment. > Versuche ich jetzt aus dieser Position her die Achse > mit dem Drehfeld zu drehen (also wie der TO das > Drehmoment messen möchte), dann sind die bestromten > Anker etwas weiter (und zwar mit der maximal möglichen > Entfernung) weg vom Magneten wie vorher, damit nimmt > aber auch die magnetische Kraft ab. > Mißt man das Drehhmoment bei laufenden Motor, dann wird > man im Durchschnitt nicht diese Extremsituation vorfinden. Okay, das ist sachlich richtig. Das Drehmoment ist (genau wie der magnetische Widerstand) leider nicht konstant, sondern variiert. Auch ohne den Motor genau zu kennen wirst Du mir hoffentlich zustimmen, dass das Drehmoment SICHER NICHT zwischen 20% und 100% variiert -- es schwankt vielleicht zwischen 90% und 100%. Andernfalls wären Schrittmotoren zu nichts zu gebrauchen. Soll heißen: Meiner Meinung nach liegt beim TO irgend ein anderes Problem vor. Ich würde gar nicht streiten, wenn er 1.8Nm statt 2.2Nm gemessen hätte -- aber 0.4Nm geht gar nicht.
Egon D. schrieb: > Auch ohne den Motor genau zu kennen wirst Du mir hoffentlich > zustimmen, dass das Drehmoment SICHER NICHT zwischen 20% und > 100% variiert -- es schwankt vielleicht zwischen 90% und 100%. > Andernfalls wären Schrittmotoren zu nichts zu gebrauchen. Im normalen Betriebszustand ja. Aber der TO mißt das Drehhmoment quasi am stehenden Motor und wundert sich warum der so gering ist. Darum ging es mir hier. Natürlich kann dann noch ein anderer Effekt dazukommen. Aber erst würde ich das Drehmoment mal vernünftig messen wollen, bevor ich hier die wildesten Theorien aufstelle. Edit: Ich habe gerade mal ein paar DB von Steppern durchforstet. Der Unterschied zwischen Drehmoment bei niedrigen Drehzahlen und Haltemoment beträgt tatsächlich nur 20%. Da hätte ich jetzt mehr geschätzt.
Beim Anschauen der Drehmomentkurven verschiedener Schrittmotoren ist mir aufgefallen, dass es da immer eine Lücke zwischen 0 und einer niedrigen Geschwindigkeit (z.B. 100 Steps/Minute) gibt, beispielhaft hier https://de.nanotec.com/produkte/536-st5918l4508-a/ Das heißt, zu ganz langsamen Geschwindigkeiten und zum Anlaufmoment machen die Hersteller keine Angaben, wahrscheinlich weil das tatsächlich nicht so toll ist. Ein Trick, da mehr rauszuholen, ist wohl beim Anlaufen kurzzeitig den Strom stark zu erhöhen. Der limitierende Faktor für den Phasenstrom vieler Schrittmotoren sind anscheinend nicht die magnetischen Eigenschaften sondern die thermischen Eigenschaften, so dass kurzzeitiger Überstrom nicht schadet aber mehr Drehmoment bringt.
Angehängte Dateien:
-

Stepper-Konstantstrom.png
6,2 KB
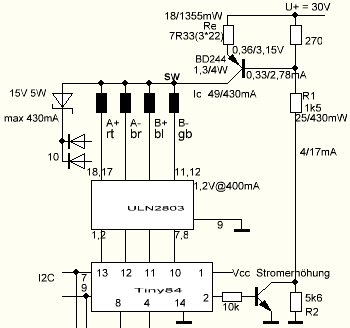
Frank H. schrieb: > Ein Trick, da mehr rauszuholen, ist wohl beim Anlaufen kurzzeitig den > Strom stark zu erhöhen. Der limitierende Faktor für den Phasenstrom > vieler Schrittmotoren sind anscheinend nicht die magnetischen > Eigenschaften sondern die thermischen Eigenschaften, so dass > kurzzeitiger Überstrom nicht schadet aber mehr Drehmoment bringt. Genauso ist das ja eigentlich bekannt. Ich habe das für die Luftklappe meines Feststoffkessels mit einer recht einfachen Schaltung gemacht. Der Unipolar-Stepper ist aus einer alten 5"-Floppy also 12V. Zur Erhöhung des Moments und der Drehzahl habe ich einen umschaltbaren Konstantstrom und eine Zenerdiode eingesetzt. Durch die Zener ist eine höhere Drehzahl möglich, da der Strom schneller abschaltet. Es muss eine 5W Leistungsdiode (oder mehrer kleine in Reihe) sein, da sie sonst keine 430mA Spitzenstrom aushält. Da der Motor an einer Spindel 1kg Gewicht hochzieht, bekommt er den hohen Strom nur in der Aufwärtsbewegung. Nach unten und in Ruhe bekommt er nur ca. 1/10 des Stroms und wird nicht heiß.
Frank H. schrieb: > Das heißt, zu ganz langsamen Geschwindigkeiten und > zum Anlaufmoment machen die Hersteller keine Angaben, > wahrscheinlich weil das tatsächlich nicht so toll ist. Ich will gar nicht leugnen, dass bei den sehr niedrigen Drehzahlen noch Effekte eine Rolle spielen können, von denen ich nichts verstehen :) Trotzdem halte ich meine physikalische Überlegung von oben aufrecht: Im normalen Vollschrittbetrieb sind ja immer beide Phasen bestromt. Wenn kommutiert werden soll (=der Motor "einen Schritt macht"), wird aber NUR EINE Phase umgepolt -- die andere wird gar nicht beein- flusst. Ich sehe daher bis zum Beweis des Gegenteils keinen Grund, warum das Moment auf weniger als die Hälfte absacken sollte. 50% MÜSSEN unter allen Umständen drin sein. Meine Meinung.
Andreas B. schrieb: > Egon D. schrieb: >> Nachvollziehbare Begründung bitte. > > Kannst Du in jedem DB eines Steppers sehen: Das Drehmoment steigt mit > der Drehzahl und ist beim Stillstand am niedristen. Das ist genauso Blödsinn, wie die Antwort von "Cab_leer". Die Drehzahl-Drehmoment-Kennlinien beziehen sich immer auf den drehenden Motor. Früher war es z.T. üblich, auch noch eine Grenzdrehzahl anzugeben, bis zu welcher der Motor ohne Last noch anlief (als Markierung auf der X-Achse). In einzelnen Fällen wurden auch Start-Stopp-Drehzahlen unter verschiedenen Lasten angegeben. Hier mal ein Beispiel: http://ostermann-net.de/electronic/schritt/sm_kennlinie.htm Da ist sogar noch eine Leistungskurve mit angegeben. Leider ist der Scan sehr schlecht, das habe ich vor rund 15 Jahren aus einem Katalog gescannt. Die Start-Stopp-Kennlinie ist jeweils die ganz linke Kurve, die die X-Achse bei M=0 schneidet. Mit freundlichen Grüßen Thorsten Ostermann
Thorsten O. schrieb: > Das ist genauso Blödsinn, wie die Antwort von "Cab_leer". Die > Drehzahl-Drehmoment-Kennlinien beziehen sich immer auf den drehenden > Motor. Früher war es z.T. üblich, auch noch eine Grenzdrehzahl > anzugeben, bis zu welcher der Motor ohne Last noch anlief (als > Markierung auf der X-Achse). In einzelnen Fällen wurden auch > Start-Stopp-Drehzahlen unter verschiedenen Lasten angegeben. Was heisst das jetzt bzgl. meiner Frage/Anwendung? Haben Schrittmotoren generell ein relativ niedriges Anlaufmoment (dh. Drehmoment beim ersten Schritt aus dem Stillstand/Halten) von ca. 20% des Haltemoments oder ist einfach mein Schrittmotor und/oder Treiber nicht geeignet?
Thorsten O. schrieb: > Das ist genauso Blödsinn, wie die Antwort von "Cab_leer". Diese Aussage hatte ich schon am 2018-10-07 10:45 zurückgezogen. Und die Erklärung warum das Verhalten (Drehmoment stehend/rotierend) wohl so ist, habe ich anschließend auch geliefert.
Hallo an das Expertenteam! Aus diesem Thread kann man viel lernen. Besonders über die Beziehungen zwischen den Menschen, weniger über den Stepper-Motor. Höheres Drehmoment erreichtman mit der höheren Betriebssapnnung der Treiberstuffe. Je höher um so schneller kann man den Motor anfahren. Auf Mikrosteps sollte man verzichten. Die vernichten das Drehmoment erheblich. Ich weiß nicht ob man bei der TB6600 die Microsteps komplett abstellen kann, müsste gehen. Eine Flexible Wellenkupplung kann durch die Federkraft dem Motor etwas auf die Sprünge helfen. Harte Kupplung mach es dem Motor etwas schwieriger die Stellung zu wechseln. Kommt natürlich auf die Last an.
Hallo Andreas, Andreas B. schrieb: > Thorsten O. schrieb: >> Das ist genauso Blödsinn, wie die Antwort von "Cab_leer". > > Diese Aussage hatte ich schon am 2018-10-07 10:45 zurückgezogen. Und die > Erklärung warum das Verhalten (Drehmoment stehend/rotierend) wohl so > ist, habe ich anschließend auch geliefert. Nein, das war keine Erklärung, das war eine (falsche) Mutmaßung. Schrittmotoren haben beim Anlauf aus dem Stand ein hohes Drehmoment, deswegen werden sie in vielen einfachen Anwendungen eingesetzt, wo man sonst einen Getriebemotor benötigen würde. Was natürlich nicht geht, ist bei hoher Last extreme Start-Stop Geschwindigkeiten fahren. Aber dafür gibt es Beschleunigungsrampen. Servomotoren fährt man ja auch mit Beschleunigungs- und Ruckbegrenzung, weil sich die Physik eben nicht ausblenden lässt. Mit freundlichen Grüßen Thorsten Ostermann
Hallo Frank, Frank H. schrieb: > Was heisst das jetzt bzgl. meiner Frage/Anwendung? Haben Schrittmotoren > generell ein relativ niedriges Anlaufmoment (dh. Drehmoment beim ersten > Schritt aus dem Stillstand/Halten) von ca. 20% des Haltemoments oder ist > einfach mein Schrittmotor und/oder Treiber nicht geeignet? Letzteres. Hat der Treiber ein Signal für eine Stromabsenkung im Stillstand, die ggf. falsch beschaltet ist? Oder ist die Startfrequenz zu hoch? Mit freundlichen Grüßen Thorsten Ostermann
Andreas B. schrieb: > Kannst Du in jedem DB eines Steppers sehen: Das Drehmoment steigt mit > der Drehzahl und ist beim Stillstand am niedristen. Wie erklärst du dir dann das Haltemoment? robi schrieb: > Höheres Drehmoment erreichtman mit der höheren Betriebssapnnung der > Treiberstuffe. Ach nee. Bei der Nennspannung von 2.24–4.48 sollten 36V doch wohl schon deutlich helfen.
Gar lustig wären einmal Links zu den verwendeten Bauteilen. Dann könnten etwas konkreter werden... Bei "billigen China-Treiberboard" muß ich immer spontan an die Teile mit 'nem Designfehler denken, bei denen die Stromeinstellung nicht richtig funktioniert. Könnte ja schon zum fehlenden Drehmoment passen.
Wie wäre es denn mal mit einer etwas sanfteren Ansteuerung. Immerhin schlägt bei Vollschrittbetrieb das Trägheitsmoment des Motors voll zu, weil die drehende Masse - gerade bei Einzelschritten (1Step/s) - bei jedem Schritt aus dem Ruhezustand von Null beschleunigt werden muss.
Wolfgang schrieb: > Ach nee. Bei der Nennspannung von 2.24–4.48 sollten 36V doch wohl schon > deutlich helfen. Schon mal ins Datenblätter der Schrittmotortreiber geschaut? Guck zum Beispiel hier: https://de.nanotec.com/produkte/595-st11018l8004-b/ Rechts von der Grafik sind kleine Kästchen 24V / 48V. Wohl bemerkt dass der innenwiderstand der Wiklung bei 1Ohm liegt und max. Strom bei 8A. -> Nennspannung 8V?! Passende Treiberstuffe wird bei dem genannten Motor(Nema42) 90-230AC laufen. Hat damit zu tun dass die meisten Ensstuffen in einer Art PWM-Modus laufen.
controllergirl schrieb: > Bei "billigen China-Treiberboard" muß ich immer spontan an die Teile mit > 'nem Designfehler denken, bei denen die Stromeinstellung nicht richtig > funktioniert. Könnte ja schon zum fehlenden Drehmoment passen. Die Chinesen sind so dumm, dass sie mit anderen Physik-Gesetzen arbeiten. Produzieren nur Billigschrott wie bilige Raubkopien von Handys. Schon mal eine Kopie vom iPhon nachgebaut? Schade! Ist ja nix drine - billiges Display, billige platine mit paar billigen Prozessoren drauf. Bischen programmieren... Klapst doch! So ein gutes Board schaft du doch auch zusammen zu bauen. Bischen programmieren... Und gut ist! Zeig uns ein Photo wenn due es nächstes Wochenende auf dem 3D-Drucker ausgedruckt hast.
robi schrieb: > Guck zum Beispiel hier: > https://de.nanotec.com/produkte/595-st11018l8004-b/ > > Rechts von der Grafik sind kleine Kästchen 24V / 48V. Und welchen eklatanten Unterschied im Drehmoment liest du für den Betrieb mit 1 Step/s (0.3 U/min) aus der Graphik ab?
Frank H. schrieb: >> Wird der Motor stromgesteuert? > Der TB6600 sollte das so machen. Eingestellt sind ca. 3A. Hast Du nen Oszi? Dann miss doch mal nach was da tatsächlich für Ströme beim Anfahren unter Belastung fließen.
Wolfgang schrieb: > Und welchen eklatanten Unterschied im Drehmoment liest du für den > Betrieb mit 1 Step/s (0.3 U/min) aus der Graphik ab? War nur ein Beispiel. Aus der Grafik sieht man aber, dass der Motor den knapp halben Drehmoment zum Haltemoment bietet. Bei gemessenen 20% sollte in der Betriebsart schon etwas sehr stark von den indealen Bedienungen abweichen. Ob nanotec oder Wantmootor, beide kochen mit Wasser.
robi schrieb: > Aus der Grafik sieht man aber, dass der Motor den > knapp halben Drehmoment zum Haltemoment bietet. Reichlich. Reichliche Hälfte. 25Nm Haltemoment gegen ca. 14Nm Drehmoment. Was -- nur ganz nebenbei bemerkt -- ausgezeichnet zu meiner Behauptung passt, das Drehmoment könne nie unter die Hälfte des theoretischen Wertes sinken, weil ja zu jedem Zeitpunkt eine Wicklung ganz gleichmäßig bestromt wird, nur die jeweils andere Wicklung kommutiert.
Die Wicklung wird nicht gleichmäßig bestromt. Wie sollen die 36V Netzteilspannung auf eine Wiklung mit 1Ohm Widerstand einwirken?
Um diese Werte zu errecihen muss man eigene Endstuffe bauen die sturr die Spannung an- und ausschaltet und als Betriebsspannung die Nennspannung von dem Motor nehmen, also 2,5-5V.
Gerd E. schrieb: > Hast Du nen Oszi? Dann miss doch mal nach was da tatsächlich für Ströme > beim Anfahren unter Belastung fließen. Den Phasebstrom selber habe ich nicht nachgemessen, aber der Strom, der aus dem Labornetzteil fließt, bleibt nahezu konstant.
Thorsten O. schrieb: > Hat der Treiber ein Signal für eine Stromabsenkung im > Stillstand, die ggf. falsch beschaltet ist? Oder ist die Startfrequenz > zu hoch? Der Treiber hat so einen Schalter, um den Haltestrom auf 30% abzusenken. Der bewirkt aber genau garnichts. In beiden Stellungen ist der Haltestrom und der "Bewegungsstrom" gleich. Neuer Treiber ist bestellt.
robi schrieb: > Die Wicklung wird nicht gleichmäßig bestromt. > Wie sollen die 36V Netzteilspannung auf eine Wiklung mit 1Ohm Widerstand > einwirken? Gerade die 36V Versorgung und die Stromregelung durch den Treiber sorgen dafür, dass die jeweils aktivierte Wicklung recht gleichmäßig bestromt wird.
OK. Habe den Nema17 Motor und TB6600 rausgeholt und an Netzteil angeschlossen. Bei 32V hat die Endstufe die Indianer-Sprache gesprochen :-/ Kamm leichter Rauch raus. Das habe ich von ihr nicht erwartet, funktionieren tut sie aber noch. Scheinbar war es nur die dicke Suppressordiode. Strom auf 0,2A eingestellt, Spannung erst 18V, dann auf 12V runtergegangen. Am Motor konnte man die Finger verbrennen. Bei 0,2A macht TB6600 sowohl beim Beströmen der einen Wicklung als der zweiten im Wechsel den PWM Modus. Mit dem Oszilloskop kann man es wunderbar sehen. Wird mehr Strom eingestellt wird PWM-Anteil im Stilstand kleiner im Schritt pulst es weiter. Maximalen Strom habe ich nicht probiert, Motor würde abbrennen. Microsteps an - keine Signaländerung auf den ersten Blick. Vermutlich wird es über Fasenverschiebung gesteuert. Ich habe mich damit nicht lange beschäftigt. In 3 Minuten angeschlossen und gemessen. Würde mich nicht an meine Aussagen festnageln lassen. Um den Drehmoment zu Messen muss ich den Motor einspannen. Dazu fehlt mir jetzt die Vorrichtung und der Hebel. Fakt ist aber - TB6600 läuft wie erwartet im PWM-Modus. Sicher kann man da von Gleichmäßigkeit sprechen. Eventuell mache mir morgen Gedanken darüber wie man die Kraft vernünftig messen kann.
robi schrieb: > Fakt ist aber - TB6600 läuft wie erwartet im PWM-Modus. Hast du die Spannung oder den Strom gemessen. Das Magnetfeld hängt nur vom Strom ab und der sollte durch die Spule geglättet sein, d.h. nur Restwelligkeit haben, aber nicht zwischen 0 und Maximalwert hin- und her springen.
Wolfgang schrieb: > robi schrieb: >> Fakt ist aber - TB6600 läuft wie erwartet im PWM-Modus. > > Hast du die Spannung oder den Strom gemessen. Ich fürchte, die Frage erübrigt sich -- es gibt ja in der Regel gar keine Stelle im Stromkreis, an der man den Spulenstrom vernünftig messen kann. Selbst der Shunt zur Stromregelung taugt nicht, weil der während des "slow decay" den Wicklungsstrom nicht führt. Alles nicht so einfach.
Egon D. schrieb: > Ich fürchte, die Frage erübrigt sich -- es gibt ja in > der Regel gar keine Stelle im Stromkreis, an der man > den Spulenstrom vernünftig messen kann. Normalerweise wird man den Spulenstrom da messen, wo er fließt, nämlich in einer der beiden Zuleitungen zur Spule. Über einem kleinen Shunt in Serie mit der Spule ist es doch kein Problem. Die Spannungsdifferenz der Signale liefert einem nach Karl Ohm den Strom. Wahlweise kann man die über zwei Oszikanälen mit Differenzbildung oder einem geeigneten Verstärker (z.B. INA240) auswerten. Eine ausreichend schnelle DC-Stromzangen wäre auch eine Möglichkeit.
Wolfgang schrieb: > Egon D. schrieb: >> Ich fürchte, die Frage erübrigt sich -- es gibt ja in >> der Regel gar keine Stelle im Stromkreis, an der man >> den Spulenstrom vernünftig messen kann. > > Normalerweise wird man den Spulenstrom da messen, wo > er fließt, nämlich in einer der beiden Zuleitungen > zur Spule. Über einem kleinen Shunt in Serie mit der > Spule ist es doch kein Problem. Doch -- denn erstens ist da, wo man ihn benötigt, von Natur aus kein Shunt, und zweitens führen alle geeigneten Punkte heftige steilflankige Wechselspannung gegen GND. Ideale Voraussetzungen, um Unsinn zu messen :) > Die Spannungsdifferenz der Signale liefert einem nach > Karl Ohm den Strom. "Georg Simon". Soviel Zeit muss sein :) Abgesehen davon: ICH weiss, wie das geht. Ich traue mir auch zu, eventuelle Störungen, die durch den getakteten Betrieb entstehen, zu erkennen und zu beseitigen. Ohne ihm zu Nahe treten zu wollen -- aber bei robi bin ich da nicht so sicher. > Wahlweise kann man die über zwei Oszikanälen mit > Differenzbildung oder einem geeigneten Verstärker > (z.B. INA240) auswerten. Eine ausreichend schnelle > DC-Stromzangen wäre auch eine Möglichkeit. Stromzange gefällt mir noch am Besten.
Egon D. schrieb: > Ideale Voraussetzungen, um Unsinn zu messen :) Um PWM von Restwelligkeit zu unterscheiden, wird es wohl reichen, wenn man drauf achtet, dass die Abtastfrequenz deutlich über der Chopper-Frequenz des Treibers (max. 60kHz) liegt ;-)
Angehängte Dateien:
-

haltemoment1.jpg
79 KB -

haltemoment2.jpg
80 KB -

1hz.jpg
74 KB -

50hz.jpg
130 KB -

200hz.jpg
85 KB -

500hz.jpg
72 KB -

1kz.jpg
79 KB
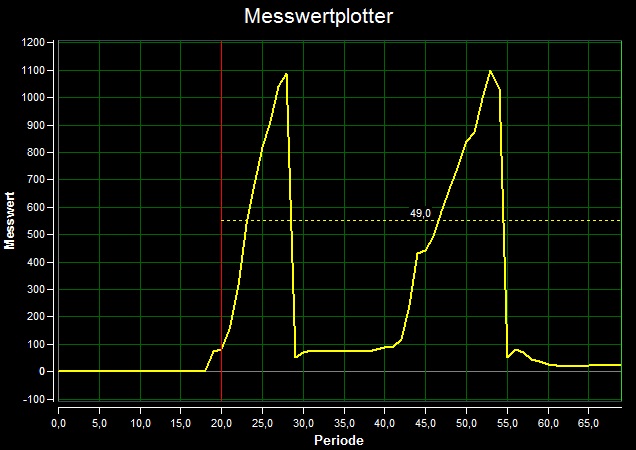
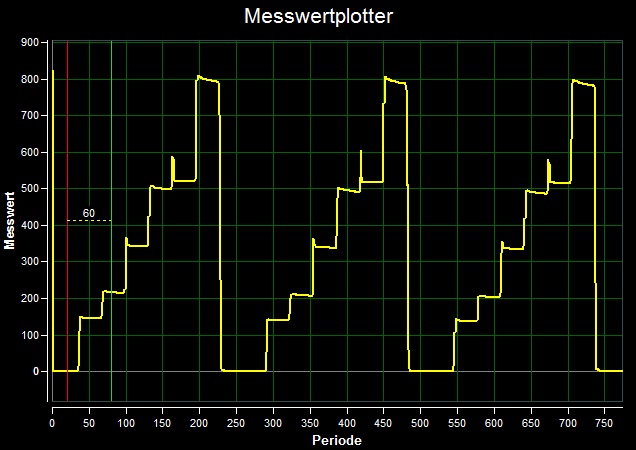
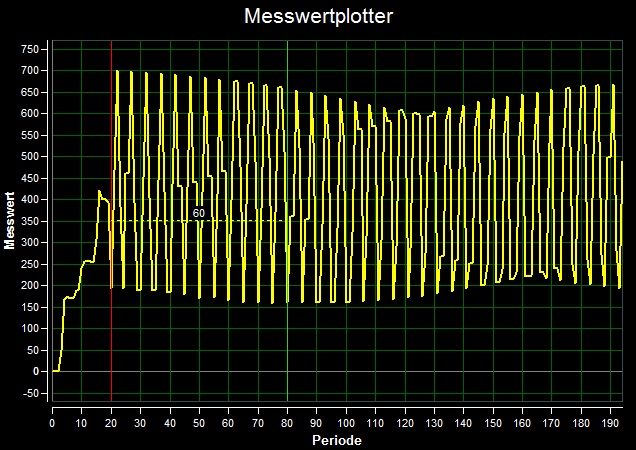


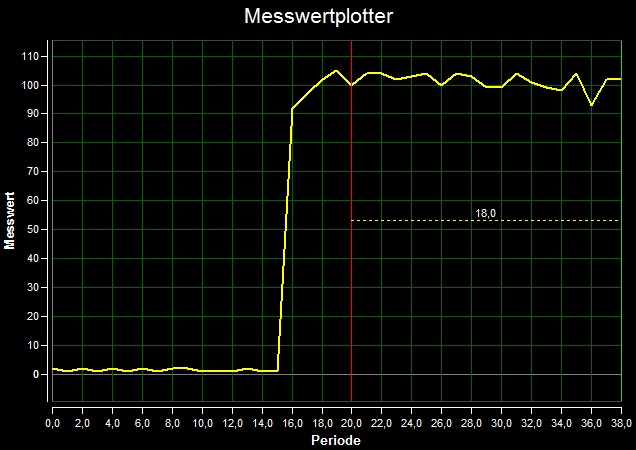
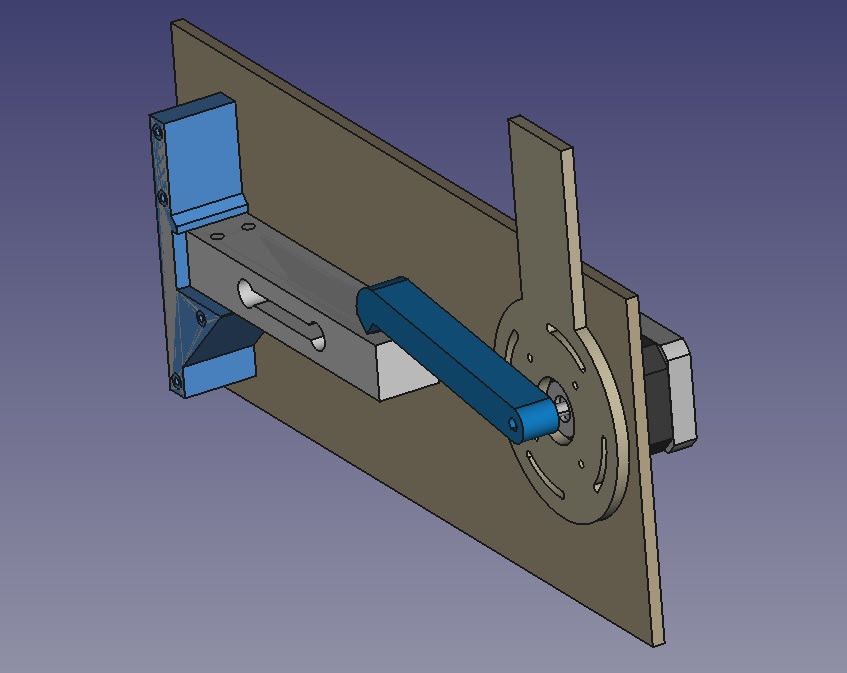
Motor: 17HS24-0644S Endstufe: HY-DIV268-5A Netzteil: Emerson SolaHD SDN-P 240W 24Vdc 10A Messzelle: 3Kg Messverstärker: 800Hz, auf die Messzelle mit Prifgewicht abgeglichen. Motor macht einen Schritt wo er viel Kaft hat, dann die Hälfte, dann wieder viel. Vermute, dass dabei wie folgt beschaltet wird. Eine Wicklung, beide, eine, beide.. Dies habe ich auch it dem Skop beobachtet, halte für wenig Sinn die Bilder vom PWM hochzuladen, da diese kaum tzr Drehmomentbewertung beitragen können. Strom Kann man an beiden Shunt-Widerständen der TB6600 messen. Beide sind am GND angeschlossen. Vom Haltemomment gibt es zwei Bilder eins mit dem Höherem Haltemomment ca. 1,2kg/cm, das andre von dem "schwachem Schritt" mit ca. 0,6kg/cm. Dieser entsprichtauch dem Datenblatt. Der Rest nach Frequenzen, Dateiname beachten. Dort steht die Frequenz. Jetzt könnt ihr rätzeln. Drehmomet ist links in Gramm angegenben, wobei der Hebel 100.0cm lang ist. Ausgangspunkt ist die Mitte der Achse.
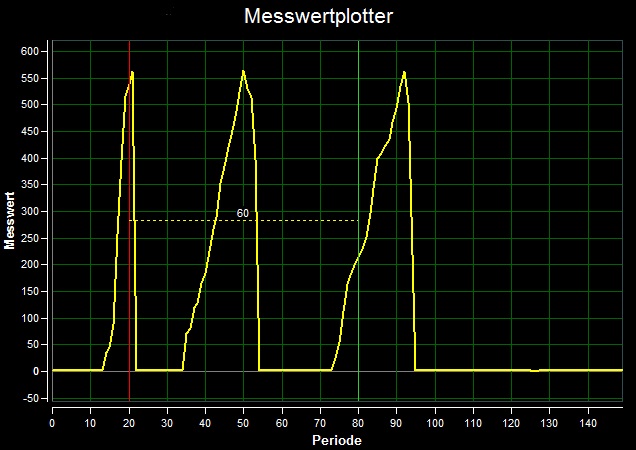
Bei den Messungen fährt der Motor gegen der Zelle, springt bei Niedrigen Frequenzen zurück um ca. 4 Schritte und fährt wieder dagegen. Bei höreren Frequenzen ist es nur ein Rattern. Die Trägheit ist so hoch, dass der Motor es kaum schafft zurückzuspringen. Esensteht eine Gerade. Manchmal schafft er nich glech hoch, bleibt bei der Hälfte stehen. So entsteht die Treppe bei höheren Frequenz. Auffällig ist aber, dass der Motor bei 1kHz nur noch 1/10 seines Drehmoments aufbringen kann.
Haltemoment wurde bei 0,01Hz mit drücken von Hand gemessen.
robi schrieb: > Drehmomet ist links in Gramm angegenben, wobei der Hebel 100.0cm lang > ist. Ausgangspunkt ist die Mitte der Achse. Der Hebel ist 100.0mm, nicht cm.
@ TE Welchen Treiber hast du den genau? Von den Tb6600 gibt es tausende Varianten. Bei einem musste ich den OSC Widerstand umlöten, da dieser total außer Reichweite war. Da gab eigentlich noch mehr Fehler im Design aber im Ganzen ging es auch so.
Was willst du mit den Messungen eigentlich zeigen / beweisen? Die Ströme wären dazu interessant. Dann wüsste man auch, ob der Mitor Voll-, Halb- oder Mikroschritt fährt. Wobei du das auch durch mitzählen der Schritte/U ermitteln kannst. Ich habe eine Drehmoment-Messwelle hier, damit kann man dann auch kontinuierlich unter Last messen. Aber in der Regel reicht es, sich die Ströme anzusehen, hier potentialfrei gemessen über Hallsensoren von LEM. Da merkt man schnell, ob der Motor sauber angesteuert wird. Mit freundlichen Grüßen Thorsten Ostermann
Thorsten O. schrieb: > Was willst du mit den Messungen eigentlich zeigen / beweisen? Die Ströme > wären dazu interessant. Dann wüsste man auch, ob der Mitor Voll-, Halb- > oder Mikroschritt fährt. Wobei du das auch durch mitzählen der > Schritte/U ermitteln kannst. > > Ich habe eine Drehmoment-Messwelle hier, damit kann man dann auch > kontinuierlich unter Last messen. Aber in der Regel reicht es, sich die > Ströme anzusehen, hier potentialfrei gemessen über Hallsensoren von LEM. > Da merkt man schnell, ob der Motor sauber angesteuert wird. Beweisen wollte ich eigentlich nichts. Wollte auch für mich überprüfen, od die Schrittmotoren für meine Anwendung geeignet sind. Bin durch Google hier gelandet. Threadüberschrift schon mal gelesen? Was bringt das wenn ich den Strom an meinem Motor messe? Das kann ich auch tun, keine Frage. Bei mir scheint es normal zu funktionieren. Drehmoment verhält sich wie erwartet, bricht nicht auf 20% ein. Frank H. hat einen anderen Motor (23HS8840D8P1-C). Dieser hat vier Wicklungen, meiner nur zwei. Hat er sie vieleich falsch verbunden? Oder Microsteps angestellt? oder das Netzteil ist zu schwach?
Thorsten O. schrieb: > Ich habe eine Drehmoment-Messwelle hier, damit kann man dann auch > kontinuierlich unter Last messen. Aber in der Regel reicht es, sich die > Ströme anzusehen, hier potentialfrei gemessen über Hallsensoren von LEM. > Da merkt man schnell, ob der Motor sauber angesteuert wird. Was will man mit der Strommessung erreichen? Wie kann man den Drehmoment rauskriegen? Der Motor ist so heiß wie die Bratpfanne. Einzige was man daraus errechnen kann ist der extrem schlechte Wirkungsgrad. Es sei den man betreibt sie am Nordpol. Aber wenn due eine Welle hast kannst deine Ergebnisse mal posten. Eventuell werden wir alle daraus schlauer.
Thorsten O. schrieb:
> Autor: Thorsten O. (Firma: mechapro GmbH)
Übrigens, wenn man Werbung betreibt sollte man sie als solche
deklarieren.
robi schrieb: > Strom Kann man an beiden Shunt-Widerständen der TB6600 messen. Da misst du aber nicht unbedingt den Strom, der durch die Wicklung des Motors fließt. Im Slow-Decay Mode fließt der Strom am Shunt vorbei, wie Egon schon richtig bemerkt hat. Siehe Abbildung z.B. im Datenblatt auf S.11 (Output Stage Transistor Operation Mode).
Den Strom zu messen habe ich schon ganze Zeit versucht. An den Schuntwiderständen, dann dabe ich zwei Zementwiderstände mit 0,1 Ohm in Reiche angeschlossen und mit zwei Instrumentenverstärkern (INA114) versucht abzulesen. Man braucht nicht unbedingt eine galvanische Trennung dafür. Doch alles was ich gemessen habe war Müll bestehend aus extrem viel Rauschen, PWM-Gedöns, niederfrequente umschaltung der Endstuffe. Wenn man sich auf PWM konzentriert hat man durch langsams Schalten der Endstufe Springen von Signal. Will man niederfrequenten Anteil sehen und schaltet den Skop auf Roll-Modus hat man extrem viel Rauschen und PWM. Alles war kaum brauchbar um Screenshot zu machen, so das es sich geloht hätte. Eine Möglichkeit hätte ich aber noch. Habe noch ein Agilent Schaltmessystem mit 20 Kanälen (34970a). Das Ding hat eine Multimeterkarte und 20-Kanalumschalter. Der Umschalter ist zweipolig. So könnte man per DMS-Messumformer (z.B. DMS auf 0...10V) den Drehmoment und Spannungen an den Shuntwiderständen die man in Reihe klemmt aufnehmen, das aber stark gefiltert. Wenn das Messystem die Kanäle schneller durchschaltet als die Motorendstufe hätte man alle Messwerte in einer Grafik. Das würde aber maximan 5Hz sein. Schneller könnte man nicht messen, da Multimeter den Messwert richtig erfassen muss. Genauigkeit wäre 6,5 Stellen. Aber... Ich brauche das nicht mehr. Wozu benötigt man diese Daten? Den Aufbau habe ich schon zerlegt.
robi schrieb: > Den Strom zu messen habe ich schon ganze Zeit > versucht. An den Schuntwiderständen, dann dabe > ich zwei Zementwiderstände mit 0,1 Ohm in Reiche > angeschlossen und mit zwei Instrumentenverstärkern > (INA114) versucht abzulesen. Man braucht nicht > unbedingt eine galvanische Trennung dafür. > > Doch alles was ich gemessen habe war Müll > bestehend aus extrem viel Rauschen, PWM-Gedöns, > niederfrequente umschaltung der Endstuffe. Genau DAS hatte ich gestern gemeint. Nun ja.
Egon D. schrieb: > Genau DAS hatte ich gestern gemeint. Ohne zu wissen, worauf man gucken muss, wird es natürlich schwierig. Zumindest über die Zeitachse und Signalpegel sollte man sich vorher im klaren sein.
Wolfgang schrieb: > Wahlweise kann man die > über zwei Oszikanälen mit Differenzbildung oder einem geeigneten > Verstärker (z.B. INA240) auswerten. Aber ein guter Tip mit dem INA240 und PWM Rejection. Vieleicht bei nächster Bestellung werde ich Paar davon ordern.
robi schrieb: >> Autor: Thorsten O. (Firma: mechapro GmbH) > Übrigens, wenn man Werbung betreibt sollte man sie als solche > deklarieren. Wir sollten froh sein, wenn hier Leute schreiben, die sich beruflich mit solchen Themen beschäftigen. Das können sie auch gern kenntlich machen. Ich sehe hier überhaupt keine Werbung von Thorsten. Werbung wäre, wenn er auf seinen Web-Shop mit Schrittmotoren und Treibern verweisen würde oder seine Dienstleistungen hier anbieten würde.
Frank H. schrieb: > Wir sollten froh sein, wenn hier Leute schreiben, die sich beruflich mit > solchen Themen beschäftigen. Das können sie auch gern kenntlich machen. > Ich sehe hier überhaupt keine Werbung von Thorsten. Werbung wäre, wenn > er auf seinen Web-Shop mit Schrittmotoren und Treibern verweisen würde > oder seine Dienstleistungen hier anbieten würde. Das tut er und nicht zuletzt durch Suchmaschinenoptimierung. Google optimiert die Suchanrfagen unter anderem danach wie oft man auf den anderen Seiten zittert bzw. mit einem Tema in Verbindung gebracht wird. Neuerdings gibt es eine europäische Richtlinie die es vorschreibt die Werbung als solche kenntlich zu machen. Wenn erschreibt "Autor: Thorsten O. Werbung: (Firma: mechapro GmbH)" wäre das warscheinlich in Ordnung. Dei Portalbetreiber sollten aber meiner Ansich nach entlohn werden. Einblendung von Bannern wird auch bezahlt.
robi schrieb: > Motor macht einen Schritt wo er viel Kaft hat, dann die Hälfte, dann > wieder viel. Das bestätigt dann ja die theoretische Überlegung von Egon D.: Es ist immer mindestens eine von 2 Wicklungen bestromt und der Schrittmotor müsste immer mindestens die Hälfte seines Haltemoments abgegeben, wenn nicht irgendwelche dynamischen Effekte (Trägheit, nicht folgen können bei Beschleunigung oder hohen Geschwindigkeiten) dazukommen. Wenn ich den neuen Treiber bekommen habe und ausprobiert habe, melde ich mich noch mal. Angeschlossen ist der Motor richtig und auch das Netzteil ist kräftig genug und Vollschritt ist auch eingestellt. Ich vermute, dass das Board rund um den TB6600 Mist ist, da zB. auch die Stromabsenkung beim Halten nicht funktioniert.
@robi Es ist hier explizit gewünscht sein Unternehmen zu nennen. Wärst du angemeldet und nicht nur als Gast unterwegs, wüstest du das.
Für die Endstufe die ich habe (HY-DIV268-5A) gibt es Modifikationen, Google fragen. Da waren Bauteile falsch bestückt. Bei meiner Endstufe ist alles richtig. Ich habe es kontrolliert. Mal nach Schaltplan und Modifikation für HY-DIV268-5A im Netz suchen und mit eigener Schaltung vergleichen. Es kann sein, dass da auch Widerstände falsch bestückt sind. Zur Not Datenblatt von TB6600. Aber 20% ist schon heftig. Im meinem Fall war der Motor mit Mindestangaben schon richtig gekennzeichnet. Drehmoment bei 1Hz liegt bei knapp 80% im Bezug auf Datenblatt. 1Hz Grafik anschauen. Da gibt es die Treppe wo ein Schritt zwischen 500g...600g ausgelassen wird. Aufgrund der Wärmeentwicklung wurde ich den Motor nicht mit vollem Strom betreiben. Würde 1/3 oder 1/2 nehmen. Mit der Golf fährt man auch nicht dauerhaft 178km/h obwohl es im Datenblatt so steht. Ich würde mit einem anderen Motor probieren und vor allem nicht mit so vielen Wicklungen. Viele Möglichkeiten bitten aber auch höhere Wahrscheinlichkeit Fehler zu machen.
Hallo Robi, robi schrieb: > Thorsten O. schrieb: >> Was willst du mit den Messungen eigentlich zeigen / beweisen? Die Ströme >> wären dazu interessant. Dann wüsste man auch, ob der Mitor Voll-, Halb- >> oder Mikroschritt fährt. Wobei du das auch durch mitzählen der >> Schritte/U ermitteln kannst. >> >> Ich habe eine Drehmoment-Messwelle hier, damit kann man dann auch >> kontinuierlich unter Last messen. Aber in der Regel reicht es, sich die >> Ströme anzusehen, hier potentialfrei gemessen über Hallsensoren von LEM. >> Da merkt man schnell, ob der Motor sauber angesteuert wird. > > Beweisen wollte ich eigentlich nichts. Wollte auch für mich überprüfen, > od die Schrittmotoren für meine Anwendung geeignet sind. Bin durch > Google hier gelandet. Threadüberschrift schon mal gelesen? > Wir diskutieren hier aber die Frage von Frank. Dein Problem ist offensichtlich ein anderes. Netiquette gelesen? ;) > Was bringt das wenn ich den Strom an meinem Motor messe? Das kann ich > auch tun, keine Frage. Bei mir scheint es normal zu funktionieren. > Drehmoment verhält sich wie erwartet, bricht nicht auf 20% ein. > > Frank H. hat einen anderen Motor (23HS8840D8P1-C). Dieser hat vier > Wicklungen, meiner nur zwei. Hat er sie vieleich falsch verbunden? > Oder Microsteps angestellt? oder das Netzteil ist zu schwach? Das könnte man über eine Strommessung gut beurteilen. Das Drehmoment ist proportional zum Strom, wenn schon der Wicklungsstrom nicht so aussieht wie erwartet, kann der Motor auch nicht genug Drehmoment aufbauen. Mit freundlichen Grüßen Thorsten Ostermann
Thorsten O. schrieb: > Wir diskutieren hier aber die Frage von Frank. Dein Problem ist > offensichtlich ein anderes. Netiquette gelesen? ;) Was für eins? Muss du näher erklären.
Thorsten O. schrieb: > Das könnte man über eine Strommessung gut beurteilen. Das Drehmoment ist > proportional zum Strom, wenn schon der Wicklungsstrom nicht so aussieht > wie erwartet, kann der Motor auch nicht genug Drehmoment aufbauen. Strom messen! Welchen Strom? Haltestrom? Es ist hier bekannt, dass das Haltemoment IO ist. Der Motor soll ja langsam drehen. Strom im Srittwechsel? Wie soll er ihn messen? Wie man ihn misst haben wir mit Egon D. diskutiert. Und mit meinen Messungen habe ich bewiesen, dass TB6600 wenn man es richtig beschaltet in der Lage ist das Drehmoment aufzubauen. Und nicht auf 20% einbricht wenn die Last angefahren wird. Thorsten O. schrieb: > Netiquette gelesen? ;) Nein, Google verwendet. Das habe ich schon erwähnt. Nichts ausser laute Sprüche!
Frank H. schrieb: > Das bestätigt dann ja die theoretische Überlegung von Egon D.: Es ist > immer mindestens eine von 2 Wicklungen bestromt und der Schrittmotor > müsste immer mindestens die Hälfte seines Haltemoments abgegeben, wenn > nicht irgendwelche dynamischen Effekte (Trägheit, nicht folgen können > bei Beschleunigung oder hohen Geschwindigkeiten) dazukommen. > Wenn ich den neuen Treiber bekommen habe und ausprobiert habe, melde ich > mich noch mal. Angeschlossen ist der Motor richtig und auch das Netzteil > ist kräftig genug und Vollschritt ist auch eingestellt. Ich vermute, > dass das Board rund um den TB6600 Mist ist, da zB. auch die > Stromabsenkung beim Halten nicht funktioniert. Eventuell steuerst du die Enstufe falsch an? Versuche mit sie von Hand mit einzelnen Schritten tu takten. Wenn dabei genug Drehmoment etsteht liegt es eventuell am Ansteuerungssignal. Rauschen, hochfrequent, viele Pulse statt einen?
Oder Gleitlager im Spiel? Die haben einen unschönen Sleep-Stick- Effekt. Unbewegt bleiben sie kleben.
Stip-Slick heißt das. Das dürfte hier kaum die Ursache sein, im Vergleich zum Nennmoment des Motors spielt das nur eine untergeordnete Rolle. Sonst wäre der Motor eine Fehlkonstruktion. Mit freundlichen Grüßen Thorsten Ostermann
Hallo robi, robi schrieb: > Thorsten O. schrieb: >> Das könnte man über eine Strommessung gut beurteilen. Das Drehmoment ist >> proportional zum Strom, wenn schon der Wicklungsstrom nicht so aussieht >> wie erwartet, kann der Motor auch nicht genug Drehmoment aufbauen. > > Strom messen! Welchen Strom? Haltestrom? Es ist hier bekannt, dass das > Haltemoment IO ist. Der Motor soll ja langsam drehen. > > Strom im Srittwechsel? Wie soll er ihn messen? Wie man ihn misst haben > wir mit Egon D. diskutiert. Ja was denn sonst? Da liegt doch das Problem von Frank. > Und mit meinen Messungen habe ich bewiesen, dass TB6600 wenn man es > richtig beschaltet in der Lage ist das Drehmoment aufzubauen. Und nicht > auf 20% einbricht wenn die Last angefahren wird. Davon kann man auch so ausgehen, sonst würde niemand das Ding verwenden. > Thorsten O. schrieb: >> Netiquette gelesen? ;) > > Nein, Google verwendet. Das habe ich schon erwähnt. Nichts ausser laute > Sprüche! Dein Ton gefällt mir nicht. Ich wüsste gerne, ob du auch eine so dicke Lippe riskieren würdest, wenn wir uns im RL gegenüber stehen?! Wahrscheinlich nicht. Ich beschäftige mich seit über 20 Jahren mit Schrittmotorsteuerungen und habe es wirklich nicht nötig, mich hier von Anfängern blöd anmachen zu lassen. Geh du schön wieder in deinen Bastelkeller. Wenn du zukünftig Fragen zu Schrittmotoren hast, erwarte von mir keine Antwort. Meine Werbung hattest du dir ja verbeten. EOD.
Thorsten O. schrieb: > Was willst du mit den Messungen eigentlich zeigen / beweisen? Thorsten O. schrieb: > Dein Ton gefällt mir nicht. Ich wüsste gerne, ob du auch eine so dicke > Lippe riskieren würdest, wenn wir uns im RL gegenüber stehen?! > Wahrscheinlich nicht. Thorsten O. schrieb: > Wenn du zukünftig > Fragen zu Schrittmotoren hast, erwarte von mir keine Antwort. Absolut arroganter Typ! Und so einer spaziert hier mit dem Firmennamen. Wo ist deine Messung mit der Welle? Bin ich hier falsch in deinem Revier? Fass! Egon D. schrieb: > Abgesehen davon: ICH weiss, wie das geht. Ich traue mir > auch zu, eventuelle Störungen, die durch den getakteten > Betrieb entstehen, zu erkennen und zu beseitigen. > Ohne ihm zu Nahe treten zu wollen -- aber bei robi bin > ich da nicht so sicher. Ist auch nicht gerade nett. "Ich" schreibt man in der Deutschen Sprache nicht nur groß sonder auch noch fett! <b>ICH!</b> Oder so: <b>IIICCCHHH!!!</b> Oder <b>ICHHHHHH!!!</b> robi schrieb: > Hallo an das Expertenteam! > > Aus diesem Thread kann man viel lernen. Besonders über die Beziehungen > zwischen den Menschen, weniger über den Stepper-Motor. Was sind das alles für kleine Leute die sich in den Forum trauen?
Frank H. schrieb: > Das bestätigt dann ja die theoretische Überlegung von Egon D.: Es ist > immer mindestens eine von 2 Wicklungen bestromt ... Nein, bei Vollschrittbetrieb ändert sich die Anzahl der bestromten Wicklungen nicht und der Strom ist (bis auf die Richtung) immer gleich.
Wolfgang schrieb: > Frank H. schrieb: >> Das bestätigt dann ja die theoretische Überlegung >> von Egon D.: Es ist immer mindestens eine von >> 2 Wicklungen bestromt ... > > Nein, bei Vollschrittbetrieb ändert sich die Anzahl > der bestromten Wicklungen nicht Doch, natürlich ändert sie sich. Das geht nicht anders. > und der Strom ist (bis auf die Richtung) immer > gleich. Der Spulenstrom ist aus physikalischen Gründen stetig. Wie soll der stetige Strom das Vorzeichen wechseln, wenn er nie Null sein darf?
robi schrieb: > Absolut arroganter Typ! Und so einer spaziert hier > mit dem Firmennamen. Wo ist deine Messung mit der > Welle? Bin ich hier falsch in deinem Revier? Fass! Such' Dir mal professionelle Hilfe. Der Stoff, den Du rauchst, tut Dir gar nicht gut.
Egon D. schrieb: > Wolfgang schrieb: > >> Frank H. schrieb: >>> Das bestätigt dann ja die theoretische Überlegung >>> von Egon D.: Es ist immer mindestens eine von >>> 2 Wicklungen bestromt ... >> >> Nein, bei Vollschrittbetrieb ändert sich die Anzahl >> der bestromten Wicklungen nicht > > Doch, natürlich ändert sie sich. Das geht nicht > anders. Natürlich geht das. Bei Vollschrittbetrieb sind immer gleich viele Wicklungen bestromt - hier bspw. immer alle beide. Gucks dir an (bipolar Vollschritt): https://de.nanotec.com/support/knowledge-base-pages/schrittmotor-animation/# >> und der Strom ist (bis auf die Richtung) immer >> gleich. > > Der Spulenstrom ist aus physikalischen Gründen stetig. > Wie soll der stetige Strom das Vorzeichen wechseln, > wenn er nie Null sein darf? Damit meinte ich die Sollstromstärke, nicht die Transienten, die beim Übergang von einem Bestromungsmuster auf das nächste auftreten. Erst bei Halbschritt und feiner ändert sich auch der Betrag des (Soll)-Stromes mit den Schritten, um immer (halbwegs) auf das gleiche Moment zu kommen.
Wolfgang schrieb: > Egon D. schrieb: >> Wolfgang schrieb: >> >>> Frank H. schrieb: >>>> Das bestätigt dann ja die theoretische Überlegung >>>> von Egon D.: Es ist immer mindestens eine von >>>> 2 Wicklungen bestromt ... >>> >>> Nein, bei Vollschrittbetrieb ändert sich die Anzahl >>> der bestromten Wicklungen nicht >> >> Doch, natürlich ändert sie sich. Das geht nicht >> anders. > > Natürlich geht das. Nein. Denn wenn eine Wicklung umgeschaltet wird, dann baut sich der Strom, der erst in die eine Richtung geflossen ist, ab, hat einen Nulldurchgang und nimmt dann in der anderen Richtung solange zu, bis er wieder den Sollwert erreicht hat. Dieser Prozess nimmt eine durchaus nennenswerte Zeit in Anspruch, denn die induktive Wirkung der Wicklungen ist ja der Effekt, der letztlich die Drehzahl nach oben begrenzt. > Bei Vollschrittbetrieb sind immer gleich viele > Wicklungen bestromt [...] Dass beide Wicklungen "bestromt" (=an Spannung angeschaltet) sind, bedeutet aber nicht, dass tatsächlich zu jedem Zeitpunkt Strom fließt. Das ist nicht der Fall. Das geht auch logisch nicht, denn wenn eine stetige Funktion einen Vorzeichenwechsel haben soll, dann MUSS sie irgendwo im Intervall mal Null sein. >>> und der Strom ist (bis auf die Richtung) immer >>> gleich. >> >> Der Spulenstrom ist aus physikalischen Gründen stetig. >> Wie soll der stetige Strom das Vorzeichen wechseln, >> wenn er nie Null sein darf? > > Damit meinte ich die Sollstromstärke, nicht die > Transienten, die beim Übergang von einem > Bestromungsmuster auf das nächste auftreten. Das Drehmoment hängt aber nicht von dem Strom ab, der fließen SOLL , sondern von der Stärke des Stroms, der tatsächlich FLIESZT . Die Transienten sind einer der wesentlichen Gründe dafür, dass Mikroschrittbetrieb sinnvoll ist. > Erst bei Halbschritt und feiner ändert sich auch der > Betrag des (Soll)-Stromes mit den Schritten, um immer > (halbwegs) auf das gleiche Moment zu kommen. Ja, richtig. Warum bestreitest Du oben, was Du hier jetzt bestätigst?
Egon D. schrieb: > Dieser Prozess nimmt eine durchaus nennenswerte Zeit in > Anspruch, denn die induktive Wirkung der Wicklungen ist > ja der Effekt, der letztlich die Drehzahl nach oben > begrenzt. Aber nicht bei den oben genannten 1 Step/s Egon D. schrieb: >> Erst bei Halbschritt und feiner ändert sich auch der >> Betrag des (Soll)-Stromes mit den Schritten, um immer >> (halbwegs) auf das gleiche Moment zu kommen. > > Ja, richtig. Warum bestreitest Du oben, was Du hier > jetzt bestätigst? Tue ich doch gar nicht. Oben ging es um die Steuervorgaben für Vollschrittbetrieb, hier um die bei feinerer Abstufung (s. z.B. Datenblatt TB6600HG im Abschnitt "Sequence and current level in each excitation mode" ab S.17)
Angehängte Dateien:
-

1.jpg
130 KB
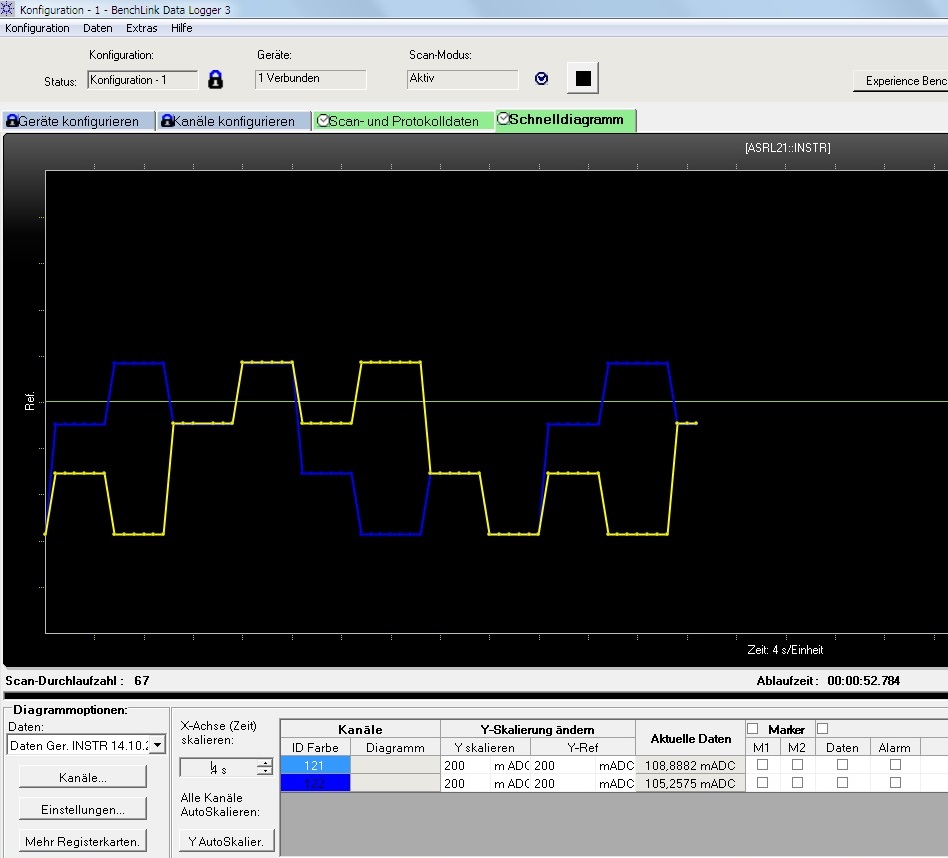
Egon D. schrieb: > Such' Dir mal professionelle Hilfe. Der Stoff, den > Du rauchst, tut Dir gar nicht gut. Bin kein Raucher. Warum sagst du der Gegenseite nichts? Der würde mich schon gern verprügeln. Thorsten O. schrieb: > Dein Ton gefällt mir nicht. Ich wüsste gerne, ob du auch eine so dicke > Lippe riskieren würdest, wenn wir uns im RL gegenüber stehen?! > Wahrscheinlich nicht. Ich bin auch im RL nicht zimperlich. Wenn mir etwas nicht gefehlt dann sage ich das auch. Wegen euch musste ich die Vorrichtung aus der Mülltonne wieder raus fischen.. Zurück zur Sache: Den Strom habe ich gemessen, sehe gerade viele Dinge die ich vorher so nicht gedacht habe. Mit dem Winkelmesser nachgemessen - der Winkel zwischen Rastzuständen beträgt 7,2°. Wenn man den geströmten Motor um eine Stelle von Hand verstellt dann springt er wohl um vier Schritte. Es scheint laut Stromveränderung Zwischenschritte zu geben, die keine Winkelveränderung bewirken. Heute ist es spät, morgen werde ich einen Winkelsensor dran basteln damit man auch den in der Software erfassen kann, dann zusammen mit dem Drehmoment.
robi schrieb: > Warum sagst du der Gegenseite nichts? Weil Thorsten nix falsch gemacht hat. > Der würde mich schon gern verprügeln. Kann ich gut verstehen. Ich auch. Du ziehst irgend einen Vorwand an den Haaren herbei, um ihn anzukacken, und beschimpfst ihn dann als arrogant, wenn er sauer reagiert?! Was soll denn das?!
Wolfgang schrieb: > Egon D. schrieb: >> Dieser Prozess nimmt eine durchaus nennenswerte Zeit in >> Anspruch, denn die induktive Wirkung der Wicklungen ist >> ja der Effekt, der letztlich die Drehzahl nach oben >> begrenzt. > > Aber nicht bei den oben genannten 1 Step/s Hat ja auch niemand behauptet. Ich stimme Dir vollständig zu, wenn Du sagst, dass im Vollschrittbetrieb zu 99.99% der Zeit beide Wicklungen voll bestromt sind (und also auch volles Moment liefern). Meine Aussage war lediglich: Auch wenn wir uns die 0.01% der Zeit heraussuchen, in der die eine Phase gerade kommutiert, dann ist trotzdem noch die andere Phase da, die gleichmäßig ihren Strom führt. Somit dürfte das Moment nie -- und zwar ÜBERHAUPT GAR NIE -- unter 50% des Haltemomentes absinken. Unser beider Aussagen sind vollständig verträglich, und ich weiss eigentlich nicht, worüber wir streiten.
Frank H. schrieb: > ich betreibe einen billigen China-Schrittmotor (23HS8840D8P1-C) mit > einem billigen China-Treiberboard (TB6600). Was ist das für ein Board? Wie lautet die Bezeichnung?
Angehängte Dateien:
-

1.JPG
30 KB -

16_microsteps.JPG
36 KB
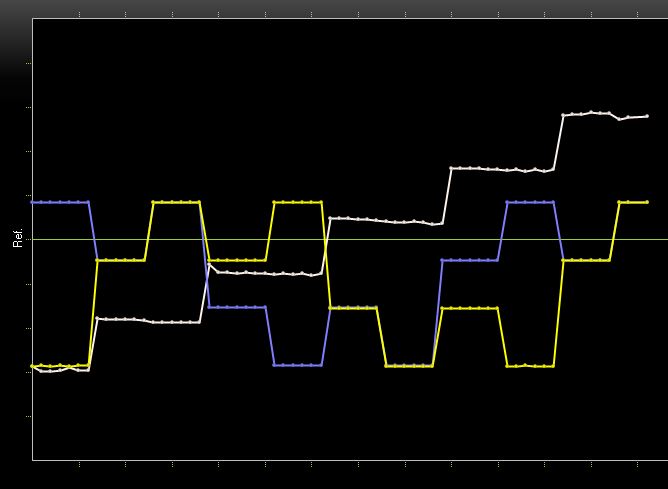
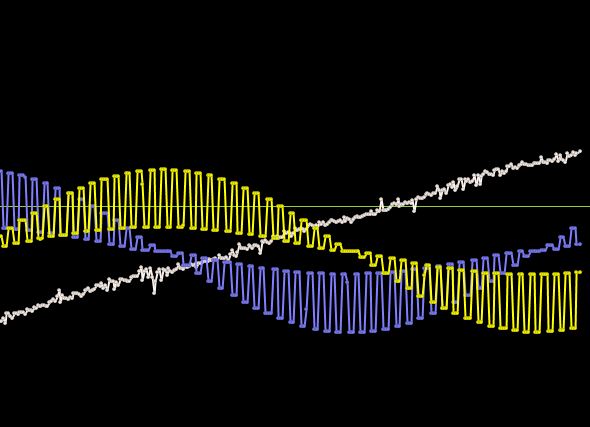
Weil ich es versprochen habe. Weiße Linie ist der Winkel. Bild 1 – ein Schritt, Bild 2 – sechzehn Mikroschritte.
Hallo Egon, Egon D. schrieb: > robi schrieb: >> Der würde mich schon gern verprügeln. > > Kann ich gut verstehen. Ich auch. Du ziehst irgend > einen Vorwand an den Haaren herbei, um ihn anzukacken, > und beschimpfst ihn dann als arrogant, wenn er sauer > reagiert?! Was soll denn das?! Danke für das Verständnis, aber ich habe weder geschrieben noch gemeint das ich irgendwem irgendwas antun wollte. Ich habe nur festgestellt, dass die wenigsten, die hier so rumtönen, sich im Real Life trauen würden, so eine dicke Lippe zu riskieren. Und zwar nicht weil ich besonders groß oder fruchteinflößend aussehe, sondern weil dann das auch so große Ego plötzlich ganz klein wird. Anonym schimpft es sich halt viel einfacher. ;) Mit freundlichen Grüßen Thorsten Ostermann
Hallo Frank, es wäre hilfreich zu sagen um was für ein TB6600 basiertes Board es sich handelt. Es gibt TB6600 Boards, die ein externes RC Zeitglied am PIN3 haben. Das RC Zeitglied triggert eine Stromabsenkung, die nach Eingang eines Step-Impulses (ca. 0.22 msec) nur noch 30% Drehmoment zuläßt. Dazu kommen weitere Schaltungsfehler die unter Umständen zu Schrittverluste führen. Gruß Stefan
Hat ein bisschen gedauert, aber ich habe das jetzt noch mal mit einem neuen Treiber (DM542) probiert. Jetzt verhält sich der Schrittmotor wie erwartet: Ca. das halbe Drehmoment vom Haltemoment wenn er anläuft. Vielen Dank an alle die mitdiskutiert haben.
Noch eine interessante Beobachtung: Mit Microsteps erreicht der Motor fast dasselbe Drehmoment wie das Haltemoment, dh. Microsteps führen bei (langsamer) Bewegung zu einem höheren Drehmoment als der Fullstep-Betrieb.
Bitte melde dich an um einen Beitrag zu schreiben. Anmeldung ist kostenlos und dauert nur eine Minute.
Bestehender Account
Schon ein Account bei Google/GoogleMail? Keine Anmeldung erforderlich!
Mit Google-Account einloggen
Mit Google-Account einloggen
Noch kein Account? Hier anmelden.