Hi, ich bin aktuell eine H-Brücke für die Ansteuerung eines 600W, 24VDC Bürstenmotors am entwickeln. Der Motor soll am Ende einen Linearantrieb positionieren. Zum testen läuft das aktuell über ein 900W Labornetzteil, nachher wird das System mit Auto-Batterien betrieben. Die Hardware funktioniert (Links, Rechts, Bremsen). Die Drehzahl wird über einen Drehencoder mit 2400p/u eingelesen. Nach der Implementierung eines PID-Reglers wollte ich testen wie gut der Motor die Position hält - und es wohl etwas übertrieben. Folge ist ein gestorbener Mosfet und zwei Dioden. Klar, der arme Mosfet musste 900W aushalten. Meine Frage ist jetzt: Wie schütze ich die Schaltung vor dem Scenario: Motor steht blockiert dreht sehr langsam unter Last? Ich messe den Strom (mit einem INA240) der durch den Motor geht (R0) und habe die Drehzahl durch den Encoder. Mein gedankliches Problem ist jetzt allerdings, dass der Motor ja im Anlauf durchaus >150A ziehen kann und darf und im Betrieb 30A unter Last benötigt, was ja vollkommen in Ordnung ist. Aber 30A im Stillstand sind ungünstig. Meine Befürchtung ist dass ich durch eine Strombegrenzung massiv an Drehmoment einbüßen muss im Anlaufmoment. Welcher Ansatz ist hier der beste? Gibt es eine AppNote die dieses Thema behandelt? Oder ein Stichwort für Google? Danke im voraus! Und sollten Infos fehlen, liefere ich die gerne nach.
Angehängte Dateien:
-

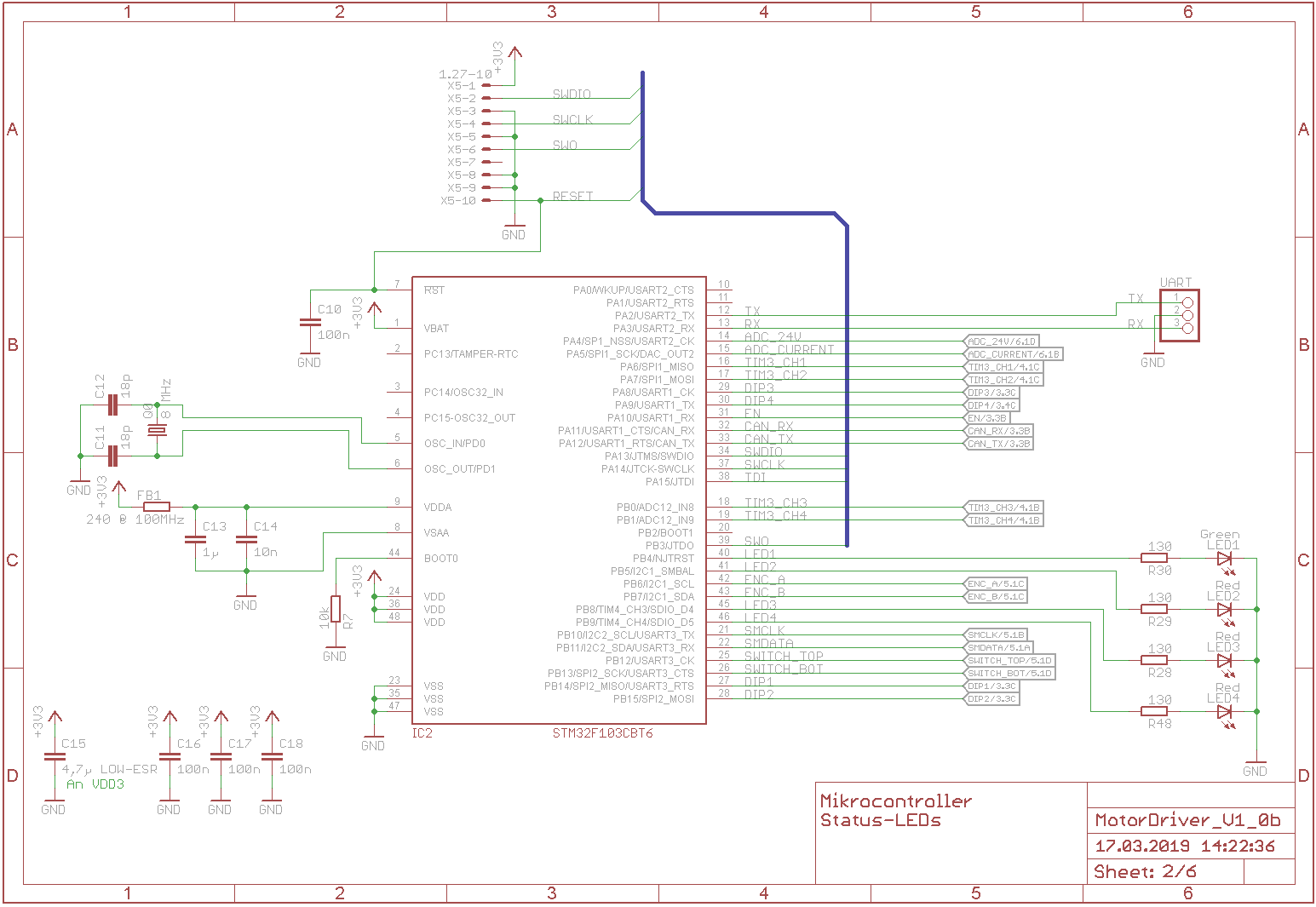
Plan_02.png
24 KB -

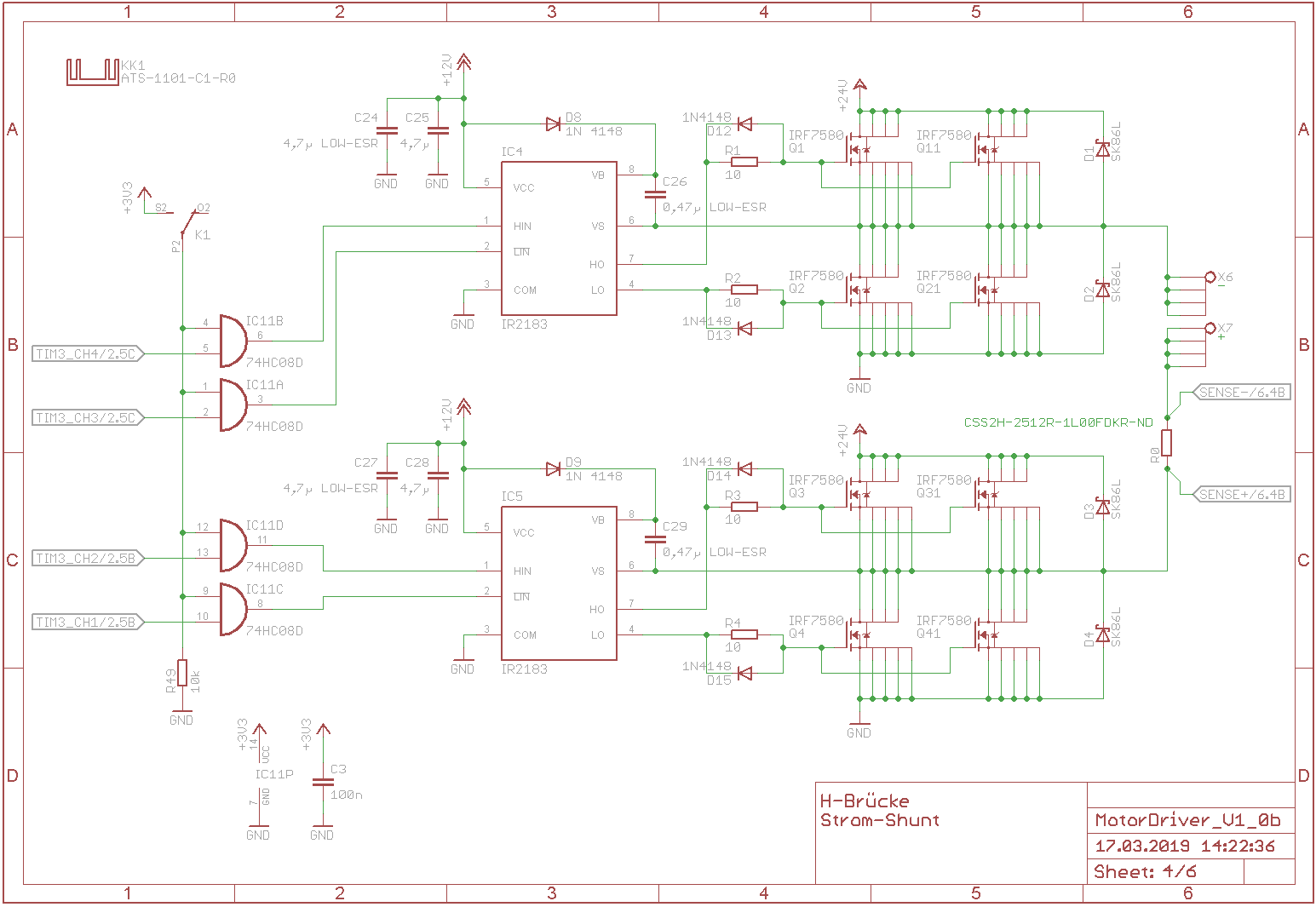
Plan_04.png
21 KB
Hallo, du könntest dir das Anfahren einfach als boolsche Zustandsvariable im Mikrocontroller speichern? Wobei dann wiederum das Problem auftritt, dass wenn der Motor gerade anläuft und er dabei bereits blockiert wird, müsstest du neben dem Zustand auch die Zeit messen die der Motor normalerweise zum anlaufen benötigt und dagegen abwegen, um diesen Fall auch ausschließen zu könnnen.
Hallo, Dein Problem schreit fast schon nach I²t-Schutz. https://de.wikipedia.org/wiki/Grenzlastintegral Gruss Micha
Martin K. schrieb: > Hi, > > ich bin aktuell eine H-Brücke für die Ansteuerung eines 600W, 24VDC > Bürstenmotors am entwickeln. Der Motor soll am Ende einen Linearantrieb > positionieren. Zum testen läuft das aktuell über ein 900W Labornetzteil, > nachher wird das System mit Auto-Batterien betrieben. > > Die Hardware funktioniert (Links, Rechts, Bremsen). Die Drehzahl wird > über einen Drehencoder mit 2400p/u eingelesen. > > Nach der Implementierung eines PID-Reglers wollte ich testen wie gut der > Motor die Position hält - und es wohl etwas übertrieben. > Folge ist ein gestorbener Mosfet und zwei Dioden. Klar, der arme Mosfet > musste 900W aushalten. > > Meine Frage ist jetzt: Wie schütze ich die Schaltung vor dem Scenario: > Motor steht blockiert dreht sehr langsam unter Last? > Ich messe den Strom (mit einem INA240) der durch den Motor geht (R0) und > habe die Drehzahl durch den Encoder. Mein gedankliches Problem ist jetzt > allerdings, dass der Motor ja im Anlauf durchaus >150A ziehen kann und > darf und im Betrieb 30A unter Last benötigt, was ja vollkommen in > Ordnung ist. Aber 30A im Stillstand sind ungünstig. Meine Befürchtung > ist dass ich durch eine Strombegrenzung massiv an Drehmoment einbüßen > muss im Anlaufmoment. > Welcher Ansatz ist hier der beste? Gibt es eine AppNote die dieses Thema > behandelt? Oder ein Stichwort für Google? > > Danke im voraus! Und sollten Infos fehlen, liefere ich die gerne nach. Mir gefällt Deine Fehleranalyse nicht. Denn wenn die FETs 150A im Anfahren aushalten sind die 30A Normalbetrieb PillePalle, die zucken nicht einmal mit der Schulter bei dem Strom, das sind heiße 20% des Nennstroms (150A@100°C), egal ob sich der Motor dreht oder nicht. Daher - warum ist nur einer gestorben? Und welcher? Ich nehme an einen der Highside-Fets hat es erwischt. Sind da beide parallelgeschalteten Fets ausgefallen oder nur einer der beiden? Denn die Schaltung hat ein paar Details, die voraussetzen das die Ansteuerung zu 100% zuverlässig ist und immer arbeitet: 1. Totzeiten um keinen Brückenkurzschluß zu verursachen. 2. ebenso zwingend muß die Lowside ebenso regelmäßig geschalten werden damit die Highside-Treiber den Puffer-C nachladen können. Ist das garantiert auch dann wenn der Motor blockiert und die Regelung daher am liebsten Dauerplus liefert?
Angehängte Dateien:
-

540A.jpg
49 KB

Martin K. schrieb: > nachher wird das System mit Auto-Batterien betrieben 1.Diese haben gewöhnlich keinen Strombegrenzer im Gegensatz zu manchem Labornetzteil. SW-seitig kannst Du ja ein paar übliche Impulse pro Umdrehung auswerten bevor Du die Notbremse ziehst, weil sonst der Schlitten auf den Prellbock knallt? Das bringt aber KEINE Sicherheit, daß ein durchlegierter Transistor den Motor dauernd unter Strooom setzt. In meinen Maschinen hat ein simpler Mikrotaster kurz vor dem Anschlag den Strom weggeschaltet und das Schlimmste verhindert. Bei 100A ist das nicht ganz so schön zu lösen. 2.Silizium schmilzt oft schneller als eine übliche Sicherung.
PWM mit Cycle by Cycle Strommessung und Begrenzer. Dann kannste auch die 900W mit Stillstand im Motor Verheizen gehen ohne dass die Fets rauchen ... falls du keine Strommessung vorgesehen hast (was schlecht wäre ...)kanns du vieleicht mit einer kurzen Handrechnung (Innenwiderstand und Induktivität des Motors) die Sinnvolle PWM-Frequenz ermitteln und danach die maximale PWM in SW Begrenzen (Ausgang PID-Regler oder Ausgang Stellglied)
Claudio F. schrieb: > PWM mit Cycle by Cycle Strommessung ... funktioniert nur solange kein Transistor/MOSFET schon durchlegiert ist z.B. durch böse Spannungsspitze oder Hitzetod.
Erst mal danke für die Antworten! MiWi schrieb: > Mir gefällt Deine Fehleranalyse nicht. Denn wenn die FETs 150A im > Anfahren aushalten sind die 30A Normalbetrieb PillePalle, die zucken > nicht einmal mit der Schulter bei dem Strom, das sind heiße 20% des > Nennstroms (150A@100°C), egal ob sich der Motor dreht oder nicht. Daher > - warum ist nur einer gestorben? Und welcher? Ich nehme an einen der > Highside-Fets hat es erwischt. Sind da beide parallelgeschalteten Fets > ausgefallen oder nur einer der beiden? Es ist der Q1 ausgefallen - Q11 scheint zumindest Messtechnisch noch i.O. zu sein. Hatte noch keine Gelegenheit die neuen Mosfets einzulöten und zu testen. Das Warum kann ich mir nur erklären, dass eben bei blockierendem Motor die 30A und 24V komplett an den Mosfets anlagen, und 360W pro FET sind dann doch etwas viel. Oder habe ich hier einen Denkfehler? MiWi schrieb: > Denn die Schaltung hat ein paar Details, die voraussetzen das die > Ansteuerung zu 100% zuverlässig ist und immer arbeitet: > > 1. Totzeiten um keinen Brückenkurzschluß zu verursachen. > 2. ebenso zwingend muß die Lowside ebenso regelmäßig geschalten werden > damit die Highside-Treiber den Puffer-C nachladen können. Zu 1: Der IR2183 hat eine integrierte Deadtime & Shoot-Through prevention. Zu 2: Der IR2183 hat eine integrierte UV-Detection. Bricht die Spannung des Bootstrap Kondensators zu weit ein, schaltet er ab und nach ein paar Sekunden erst wieder zu. Was ich nicht verstehe, warum muss ich die Lowside abschalten? Aktuell ist es in der SW so, dass LowSide immer 100% an bleibt und die Highside geschaltet wird (max PWM 95%). MiWi schrieb: > Ist das garantiert auch dann wenn der Motor blockiert und die Regelung > daher am liebsten Dauerplus liefert? Die PWM zum Zeitpunkt des Tests war bei etwa 60% (extra begrenzt im PID zum testen). oszi40 schrieb: > Das bringt aber KEINE Sicherheit, > daß ein durchlegierter Transistor den Motor dauernd unter Strooom setzt. > In meinen Maschinen hat ein simpler Mikrotaster kurz vor dem Anschlag > den Strom weggeschaltet und das Schlimmste verhindert. Bei 100A ist das > nicht ganz so schön zu lösen. Die Motorsteuerung spricht über CAN mit einem übergeordnetem Controller. Gibt es Kommunikationsprobleme oder außergewöhnliche Parameter (wie das z.b. der Motor läuft obwohl er aus sein sollte) wird ein Not-Aus ausgelöst und die Spannungsversorgung gekappt. Claudio F. schrieb: > PWM mit Cycle by Cycle Strommessung und Begrenzer. Dann kannste auch die > 900W mit Stillstand im Motor Verheizen gehen ohne dass die Fets rauchen > ... Danke für das Stichwort, danach such ich mal! Aber ist der Motor im Stillstand nicht ähnlich einem Kurzschluss? Müsste die Leistung dann nicht komplett auf den FETs liegen? Claudio F. schrieb: > falls du keine Strommessung vorgesehen hast (was schlecht wäre ...) Doch, ist drin, R0! Funktioniert auch sehr gut. Mein Ansatz wäre jetzt noch die Spannung an X6 und X7 zu messen, damit ich die Leistung über den Mosfets ausrechnen kann. Wäre das ein plausibler Ansatz?
MiWi schrieb: > Mir gefällt Deine Fehleranalyse nicht. Denn wenn die FETs 150A im > Anfahren aushalten sind die 30A Normalbetrieb PillePalle, die zucken > nicht einmal mit der Schulter bei dem Strom, das sind heiße 20% des > Nennstroms (150A@100°C), egal ob sich der Motor dreht oder nicht. Daher > - warum ist nur einer gestorben? Jetzt verstehe ich was du meinst. Ich hatte da nen dicken Denkfehler. Und jetzt frage ich mich noch mehr, warum ist er kaputt gegangen und warum nur einer. Gehe ich von 0,1 Ohm Innenwiderstand des Motors aus und rechne R0 und Ri dazu, komme ich auf 0,109 Ohm. Da das Netzteil bei 30A die Spannung reduziert, lieferte das nur noch 3,3V. Macht keine 2 W an dem Mosfet. Selbst ohne Kühlkörper sind das nur 65°C. Die einzige Idee die ich habe, ist dass der Mosfet nicht richtig verlötet war oder von Anfang an einen weg hatte. (konnte leider nicht mehr editieren)
Martin K. schrieb: > > MiWi schrieb: >> Denn die Schaltung hat ein paar Details, die voraussetzen das die >> Ansteuerung zu 100% zuverlässig ist und immer arbeitet: >> >> 1. Totzeiten um keinen Brückenkurzschluß zu verursachen. >> 2. ebenso zwingend muß die Lowside ebenso regelmäßig geschalten werden >> damit die Highside-Treiber den Puffer-C nachladen können. > > Zu 1: Der IR2183 hat eine integrierte Deadtime & Shoot-Through > prevention. ok. > Zu 2: Der IR2183 hat eine integrierte UV-Detection. Bricht die Spannung > des Bootstrap Kondensators zu weit ein, schaltet er ab und nach ein paar > Sekunden erst wieder zu. Was ich nicht verstehe, warum muss ich die > Lowside abschalten? Denk mal gut und gründlich darüber nach wie C26 oder C29 aufgeladen werden... > Aktuell ist es in der SW so, dass LowSide immer 100% > an bleibt und die Highside geschaltet wird (max PWM 95%). Nun... da hast Du schon die Ursache zu dem Ausfall - und es funktionierte nur eher zufällig. Der ausgefallene FET (wie angenommen Highside) ist halt als erster unter der sinkenden Gatespannung gelitten.. und das wars. der andere ist vermutlich angeknackst. Wackle mit der Lowside auch entsprechend herum und das Werkl sollte funktionieren. Oder suche Dir eine aktive Ladungspumpe bzw. Wandler, die die beiden Cs der Highside-Ansteuerung konstant lädt so das DC-Betrieb der Lowside möglich ist.
Angehängte Dateien:
-

755.png
30 KB
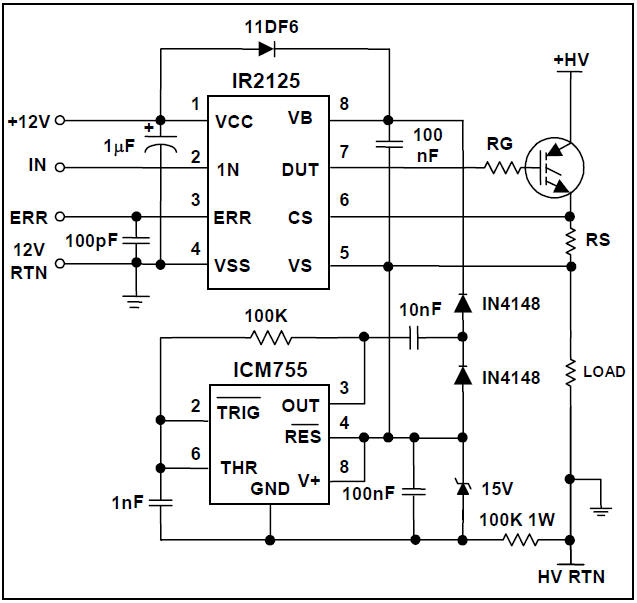
Also ich habe das jetzt mal in LTSpice Simuliert und versucht deine Aussage nachzuvollziehen. Mit "Wackle mit der Lowside auch entsprechend herum" meinst du Q2 und Q21, in dem Fall dass Q1/11, Q4/41 'arbeiten'? Anders wüsste ich nicht wie der Kondensator laden sollte, außer über die Last und Q4/41, die aber ja immer high sind in dem Betriebsfall. Q4/41 auszuschalten im Takt mit Q1/11 würde ja keinen Sinn machen, dann kapp ich ja den Strompfad. Ich habe auch eine AppNote dazu gefunden (an-978 von IR) und die Schaltung im Anhang. Das habe ich auch mal simuliert und das funktioniert soweit, werde ich also wohl so in meine Schaltung integrieren. Parallel werde ich testen Q1/11 und Q2/21 entsprechen invertiert anzusteuern.
Martin K. schrieb: > Also ich habe das jetzt mal in LTSpice Simuliert und versucht deine > Aussage nachzuvollziehen. > Mit "Wackle mit der Lowside auch entsprechend herum" meinst du Q2 und > Q21, in dem Fall dass Q1/11, Q4/41 'arbeiten'? > Anders wüsste ich nicht wie der Kondensator laden sollte, außer über die > Last und Q4/41, die aber ja immer high sind in dem Betriebsfall. Q4/41 > auszuschalten im Takt mit Q1/11 würde ja keinen Sinn machen, dann kapp > ich ja den Strompfad. > > Ich habe auch eine AppNote dazu gefunden (an-978 von IR) und die > Schaltung im Anhang. Das habe ich auch mal simuliert und das > funktioniert soweit, werde ich also wohl so in meine Schaltung > integrieren. > Parallel werde ich testen Q1/11 und Q2/21 entsprechen invertiert > anzusteuern. Lowside sind die FETs, die gegen GND schalten, Highside sind die, die von VCC kommend schalten. Die Ladungspumpe.... nun, die funktionert auch nur dann wenn diese Seite der Brücke angesteuert wird, denn sonst steht da keine Versorgung an. iaW: die Startzeit der Ladungspumpe muß schneller sein als der Puffer-C seine über die 11DF6 erhaltene Ladung verliert. Also C groß machen (2-4u sollten reichen, 100n sind IMHO zu wenig, ohne das nun nachgerechnet zu haben) Und - ich denke Du solltest sehr genau nachdenken und Dir einmal ohne Simulation versuchen klarzumachen was die Ströme in dem System machen wenn Fets zu und weggeschalten werden. So gaaaaanz trivial ist das von außen nicht, vor allem wenn 30 oder mehr A im Spiel sind... Was macht der Strom in der Totzeit der Brücke? Auch dann wenn kein FET leitet will der Strom nämlich weiter strömen. Und die Freilaufdioden der FETs brauchen eine gewissen Einschaltzeit... Wie gesagt, das ist alles kein Hexenwerk und wenn man einmal alle States durchgeht auch gut verständlich - doch mußt Du wissen was passiert bevor Du an der Modulation herumspielst...
Bitte melde dich an um einen Beitrag zu schreiben. Anmeldung ist kostenlos und dauert nur eine Minute.
Bestehender Account
Schon ein Account bei Google/GoogleMail? Keine Anmeldung erforderlich!
Mit Google-Account einloggen
Mit Google-Account einloggen
Noch kein Account? Hier anmelden.