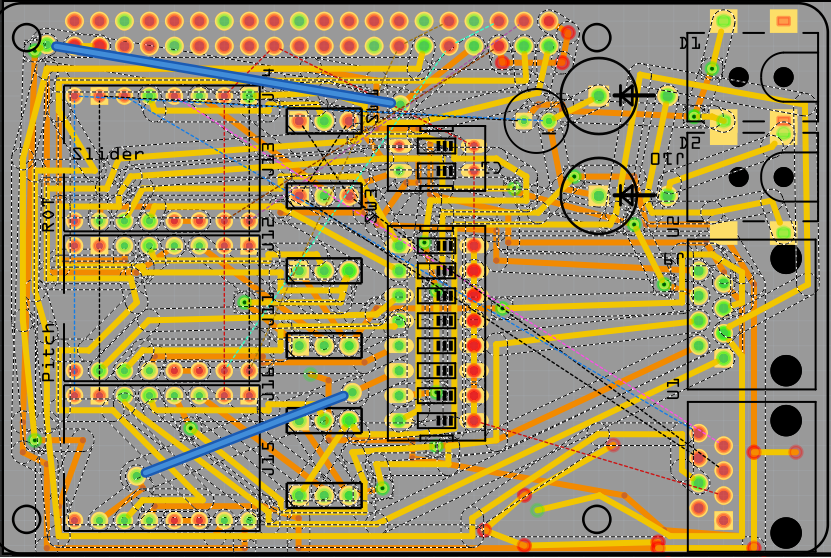
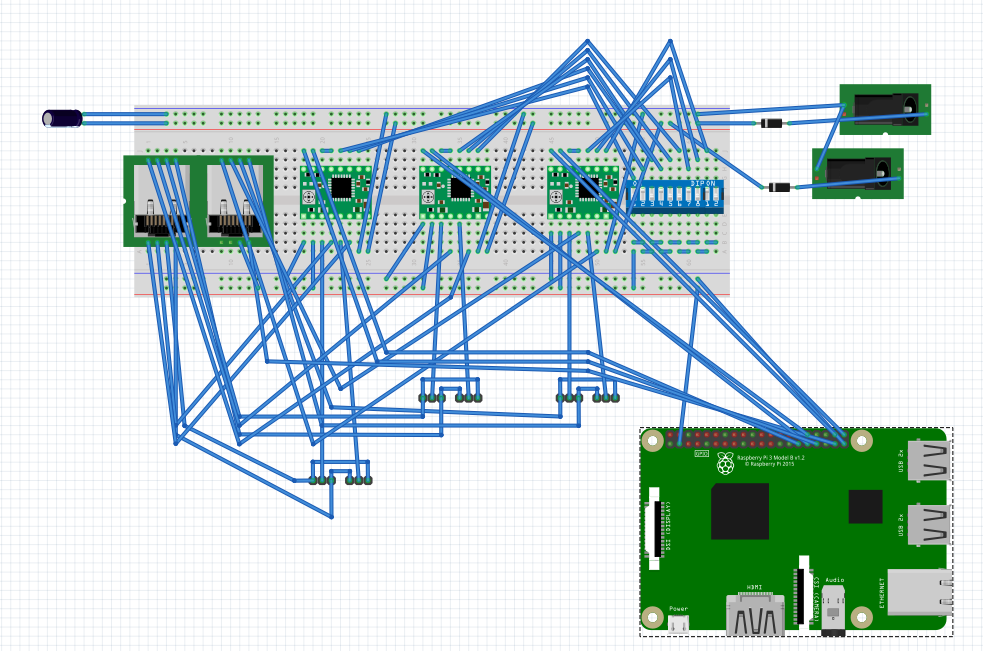
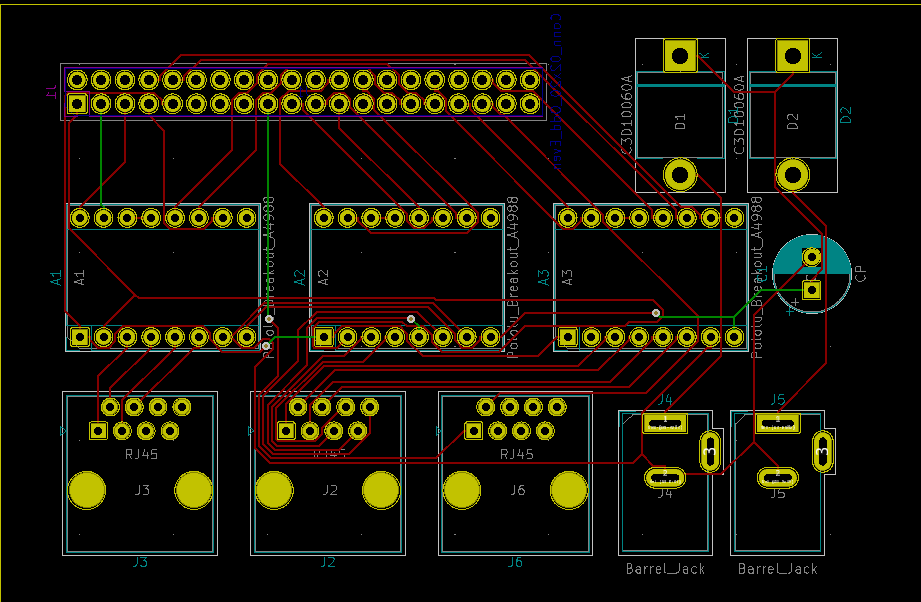
Guten Tag Liebe Forumsmitglieder Ich habe mich hier angemeldet, um Euch nach ein paar Tipps zu fragen, wie ich meine PCB am besten erstellen soll. Die PCP soll wie ein Display auf den Pins des Raspberry Pi 3B+ aufgesteckt werden können. Darauf sollen sich dann 2 Schrittmotor-Treiber des Typs a4988 resp. drv8825 auf stecken lassen die dann meine 3 Schrittmotoren meines Photosliders steuern sollen. Da die beiden Treiber eine unterschiedliche Pin Belegung haben, dachte ich mir, dass ich pro Treiber 2x3 Pins mit eimen jumper drauf packe um die zwei Bahnen je nach Typ kreuzen zu können. Zudem bräuchte ich pro Treiber 3 dip-Schalten, mit welchen ich die Schrittweiten an den Treibern einstellen kann. Als Abgänge für die Schrittmotoren und Endschalter habe ich gedacht, dass ich diese mit einer RJ45-verbindung realisiere. Bessere Steckverbindungen zum auflöten habe ich keine gefunden. Als Einspeisung für die Motorspannung dachte ich an einen Power-Jack. Von diesen hätte ich dann 2 Stück eingesetzt inkl. einer 10A - Diode, damit ich im Betrieb unterbruchsfrei einen zweiten Akku anschliessen- und den Leeren abziehen kann. Nun mein eigentliches Problem: Ich habe zuerst mit EasyEDA angefangen - bin nun auf Fritzing umgestiegen, habe mich einen ganzen Tag damit beschäftigt die Platine mit den Bahnen mit Autoroute zu erstellen, aber irgendwie bin ich nicht ganz happy. Es macht mit immer so komische gestrichelte Linien auf der Platine Verschiebt mir nach dem Löschen dieser die Steppertreiber vom Bradboard usw. Ich denke langsam, dass dies auch nicht die richtige Software ist für meine kleine Platine mit all diesen Komponenten auf dem engen Raum. Oder ich mache es einfach falsch. Und zu allerletzt wenn ich dann noch die Bahnen, welche für die Motoren gedacht sind verbreitern will, finde ich diese kaum in diesem Wirrwarr. Soll ich da eine komplett andere Software nehmen? Oder kann mir jemand einen Tipp geben, wie ich aus meinen gestekten Komponenten auf dem Breadboard mit geringstem Aufwand eine Platine hin bekomme? Mein eigentliches Projekt ist der Bau und 3D- Druck des Sliders und die Programmierung dazu - Ich hätte nie gedacht, dass die Platine einen solchen Aufwand generieren würde... Oder ich mach was komplett falsch. Ich weiss, es ist keine allzu spezifische elektronische Frage, dachte mir aber dass ich in diesem Forum trotzdem richtig bin um ein paar Tipps von den Spezeialisten zu erlhalten. Besten Dank für's Durchlesen und falls mir jemand weiter helfen könnte, wäre ich sehr dankbar. Gruss zahu
Angehängte Dateien:
-

Fritzing-Leiterplatte.png
480 KB -

Fritzing-Steckplatine.png
320 KB
Beitrag #5869712 wurde von einem Moderator gelöscht.
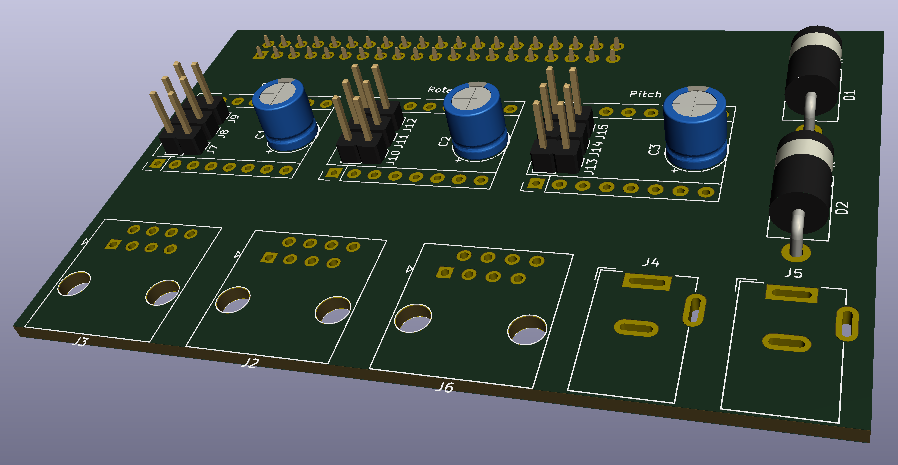
Hallo zahu, Eventuell ist es sinnvoll, das Projekt nochmal umzustellen auf eine richtige PCB-Software wie KiCAD. Das würde mit einschließen, einen richtigen Schaltplan (getrennt vom Layout) zu erstellen. Die entsprechenden Symbole für die Schrittmotortreiber-Module müsstest du dir dann anderweitig besorgen oder selbst erstellen. Prinzipiell sollte es aber möglich sein diese Schaltung auf 2 Layer zu entflechten. Allerdings von Hand, von der Verwendung des Autorouters eher abraten. Eventuell hat Fritzing ein vorgebenes Rastermaß, bzw. Mindestgröße der Leiterbahnen die hier hinderlich sind. Was mir ansonsten zur Schaltung noch einfällt: - Wenn du Akku-Betrieb planst, könnte das RPi gleich über die Motorspannung mitversorgt werden, es bräuchte allerdings noch ein Spannungswandler-Modul dass den Pi mit 5V versorgt. Andernfalls solltest du zumindest darauf achten, dass das fehlen der Motorspannung vom Pi erkannt werden kann. - Die DIP-Schalter könnten durch GPIO-Pins ersetzt werden, d.h. vom Pi in Software gesteuert werden. - Einige der Bauteile erscheinend mir sehr dicht beeinander. Speziell die DC-Buchsen sehen aus wie SMD-Buchsen mit überlappenden Pins, das ließe sich so wie abgebildet schwer einbauen/löten. Die 3D-Ansicht von KiCAD könnte hier weiterhelfen ;) Gruß, strfry
Danke strfry für Deine rasche und ausführliche Antwort. Ich glaube auch, dass ich es mit kicad versuchen sollte. Ich habe es heute morgen herunter geladen, installiert und schaute mir auch schon ein paar Tutorials an... Was im Moment mein grösstes Problem ist, dass ich nicht genau weiss, wie die Bauteile, welche ich mir vorstelle überhaupt heissen. Im Fritzing habe ich unter Raspberry Pi 3B+ gleich die 2x20 Pins gfunden mit der richtigen GPIO - Beschriftung. In KiCAD finde ich dies nicht, obwohl mir die Software um einiges mächtiger erscheint. Da habe ich nur Conn_02x20 gefunden. Stromanschluss fand ich anhnad eines Videos unter Barrel_Jack. Die Stepper Motor-Treiber gibt es schematisch, aber die Pinbelegung ist nicht identisch mit der Komponente - halt nur schematisch- Vielleicht wird die Komponante dann ja auf der PCB richtig dargestellt. Denn wienn ich die dann zuerst noch irgendwie zeichnen muss... Gib es irgendwo eine Art Katalog der Komponenten mit Bildchen, wo die genauen Namen wie sie in den Bibliotheken zu finden sind? Das mit dem Dip-Schlatern hast du recht - da könnte ich 9 GPIO's opfern. Davon hätte ich ja noch genug. Weisst Du vielleicht, wie diese Männlichen Stecker 2x20 pin zum direkt auflöten heissen, sodass ich diese von unten auf der Platine positioniert anlöten kann um diese dann direkt auf den Raspi zu stecken? Ich denke so komplex ist diese Schlaltung ja nicht, dass ich dies als Beginner mit meiner ersten Platine nicht hin bekommen sollte. ;-)
Ich würde es mit der kostenlosen Version von Target probieren. Mehr als 250 Pins/Pads hat das Projekt sicher nicht. https://server.ibfriedrich.com/wiki/ibfwikide/index.php?title=Download
Jari Z. schrieb: > Ich denke langsam, dass dies auch nicht die richtige Software ist Das denke ich auch. Bei dem rechten Bild kam mir spontan die Spinne Thekla von Biene Maja in den Kopf. Ich empfehle ebenfalls KiCad, falls es wenig (oder nichts) kosten soll.
Stefanus F. schrieb: > Ich empfehle ebenfalls KiCad, falls es wenig (oder nichts) kosten soll. Schließe mich an. Ist einfach zu erlernen und Hilfestellung gibt es hier im Forum.
Angehängte Dateien:
-

KiCAD.png
11 KB
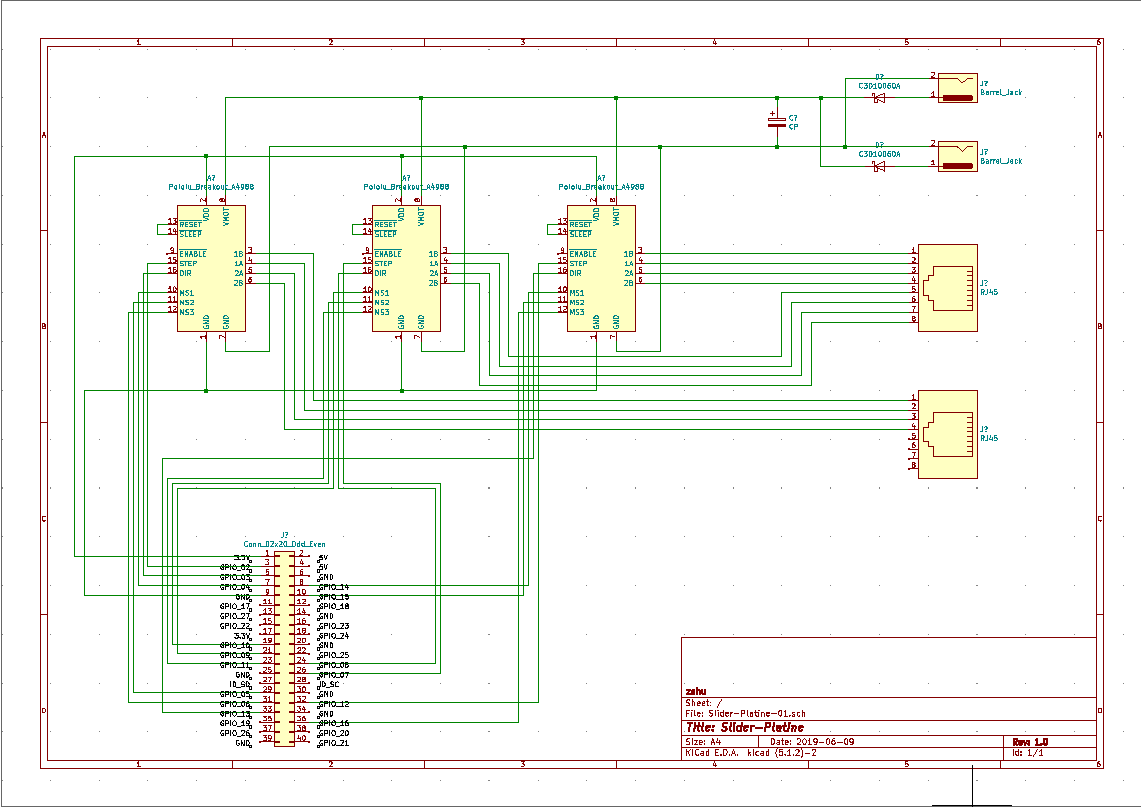
...Dann bin ich ja froh, wenn ihr mir KiCAD empfehlt, da ich schon recht viel gezeichnet habe... Wie finde ich denn nun diese Pins, wo man die Jumper draufstecken kann? Muss nur noch das auskreuzen der Mootroenzuleitung realisieren damit ich statt des a4988 auch den drv8825 einsetzen könnte. Dann kann ich hinter die PCB gehen... Ich hoffe, dass ich mit dem Schema nun den grössten Teil hinter mir habe. Gruss, zahu
Jari Z. schrieb: > Das mit dem Dip-Schlatern hast du recht - da könnte ich 9 GPIO's opfern. Warum so viele? Willst du die Motoren alle mit verschiedenen Schrittunterteilungen laufen lassen und brauchst du wirklich alle Schrittmodi? Wozu?
Es kann gut sein, dass die Motoren mit unterschiedlichen Schrittweiten betrieben werden... Das kommt auf die Übersetzung an... der eine zieht einen Schlitten bis zu 2m weit, ein anderer sollte die Kamera um die eigene Achse drehen können und der dritte dann die Kamera neigen... und wenn man das dann fleissend proportional zur anzahl Bilder resp. stops für Timelapse machen möchte, muss die Auflösung schon recht fein sein. Ist halt noch in Entwicklung das ganze... Was ich dann schlussendlich brauche, werde ich dann noch herausfinden.
Im Moment suche ich brauchbare Endschalter - diese kommen zwar nicht auf die Platine drauf, aber werden auf den einen RJ45 Stecker zusammen mit dem Motor für den Schlitten geführt. Wobei den kann ich ja auch sein lassen, da er eh nicht in den Stromkreis kommt sondern erst nach dem Stecker...
Fraglich ist noch, ob Du mit dem Raspi glücklichst wirst bei dieser Anwendung. Probleme können Echtzeitanforderungen sein zum gleichmässigen Ansteuern der Treiber... Wenn Du mit dem Controller nicht viel anderes machen musst, würde ich Dir eher einen Arduino empfehlen. Gruss Chregu
> Wie finde ich denn nun diese Pins, wo man die Jumper draufstecken kann?
Vermutlich meinst du "Pinheader". Die gibt es in KiCad in großer
Auswahl.
Hoi Chrigu Ja, daran habe ich auch shcon gedacht... Aber wenn ich dann noch mit einer SW die Bilder nach der Helligkeit analysieren möchte, und mit gphoto die Parameter der Kamera anpassen möchte,so komme ich ja um einen Raspi nicht herum. evtl. kann man den Arduiono via USB noch an den Raspi hängen wenn nötig... Dann fragt sich nur noch in welcher Sprache das dann alles zu programmieren ist. Danke auch Dir für den Tipp rummses ;-)
Angehängte Dateien:
-

FEMALE-PIN-HEADER.png
58 KB

Könnte mir bitte vielleicht noch jemnd verraten, nach was ich in KIcad suchen muss, wenn ich so etwas hier suche? 2X20 PIN Double row Straight FEMALE Siehe Bild Und wie bekomme ich dann diese leiste von unten in meine Platine gesteckt? Damit könnte ich dann meine Platine direkt auf den raspi stecken und bräuchte nicht noch ein flachbandkabel dazwischen. Besten Dank :-)
Buchsenleiste Du musst die einseitige Platine Kopfüber verwenden, oder doppelseitige (mit Durchkontaktierung) verwenden.
Jari Z. schrieb: > Könnte mir bitte vielleicht noch jemnd verraten, nach was ich in KIcad > suchen muss, wenn ich so etwas hier suche? > > 2X20 PIN Double row Straight FEMALE > Siehe Bild > > Und wie bekomme ich dann diese leiste von unten in meine Platine > gesteckt? > > Damit könnte ich dann meine Platine direkt auf den raspi stecken und > bräuchte nicht noch ein flachbandkabel dazwischen. > > Besten Dank :-) Zu finden in den Footprints in der Bibliothek "Connector_PinSocket_2.54mm"unter "PinSocket_2x20_P2.54mm_Vertical" Du kannst in Pcbnew den das Bauteil (also die Buchsenleiste) auf die Rückseite der Platine setzen, wenn du das Bauteil markierst und dann Rechtsklick "Wenden" oder einfach nur F drücken. Dann ist alles spiegelverkehrt, weil das Bauteil sozusagen von unten siehst.
WOW - toll - ich habe es hin bekommen! Vielen Dank :-) Habe jetzt bemerkt, dass alle Anschlüsse natürlich auch speigelverkehrt sind und ich die Leiterbahnen neu anordnen muss. Aber das bekomme ich auch noch hin...
Angehängte Dateien:
-

AutoRouter01.png
55 KB
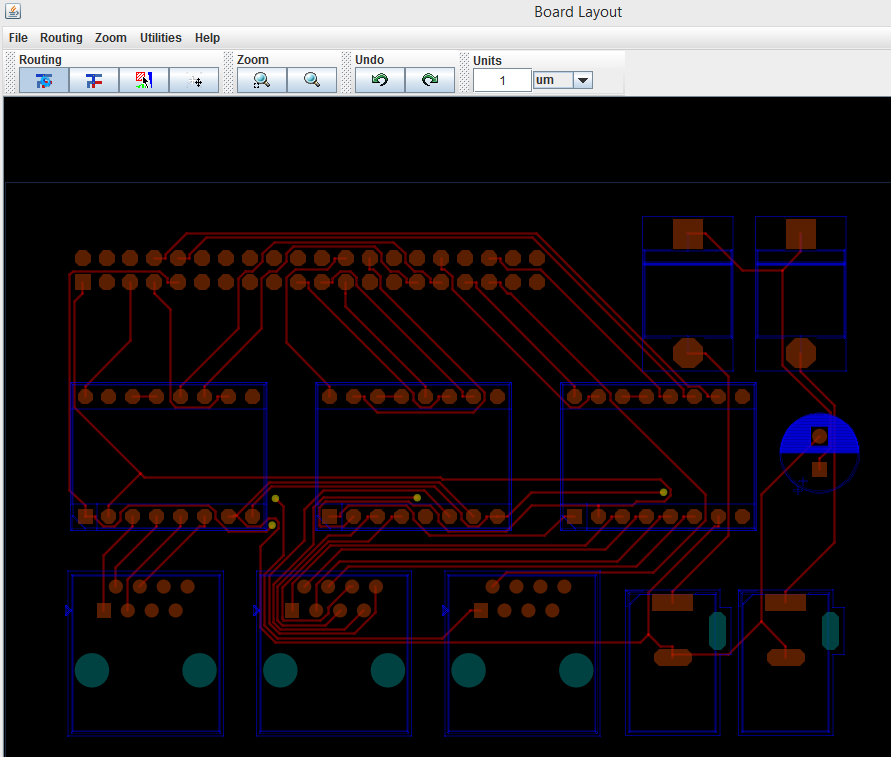
Eine Frage zu Auto Router habe ich noch. Ich habe den Java Auto Router installiert. Aus PCBnew eine Specctra.dsn exportiert und diese dann im Auto Router geöffnet. Irgendwie routet mir Autorouter alles nur auf einem Layer, obwohl ich bei den Settings in KIcad eine 2 Layer-Platine definiert habe. Zudem habe ich noch so gelbe Punkte bekommen. Sind diese geacht, dass man da zwei Drähte anlötet und die Punkte dann so verbindet, da es keine Möglichkeit gibt ohne Kreuzungen zu routen? Mit zwei Layern wäre das Problem sicher auch gleich gelöst. Die Power-Leitungen mache ich dann noch manuell etwas dicker - ca. 1mm oder so.
Angehängte Dateien:
Nachtrag! Nach dem Importieren kann man sehen, dass beide Layer verwndet wurden. Nur im Auto Router sieht man das halt nicht. Somit hat sich alles geklärt. ;-)
Sicher das RJ45 die benötigten Ströme treiben kann? Was ist mit der 5V Versorgung des Raspi?
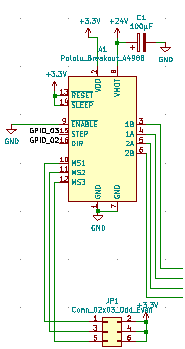
Jari Z. schrieb: > Nachtrag! > Nach dem Importieren kann man sehen, dass beide Layer verwndet wurden. > Nur im Auto Router sieht man das halt nicht. > Somit hat sich alles geklärt. ;-) Wenn das das Ergebnis des Autorouters ist, was du angehängt hast, dann weißt du, dass du da noch einiges korrigieren musst. Insgesamt war es glaube ich nutzlos den Autorouter überhaupt zu nutzen. Außerdem fehlen für die Schrittmotortreiber Links und Mitte die 100µF Elkos an den Versorgungsspannungspins. Nur einer für alle drei wird nicht reichen. Die sollten zusdem so nahe wie möglich an die Eingänge Vmot und GND der Pololuplatine. Ob die Schaltung so funktioniert... Brauchst du nicht zumindest Pull-ups für die Mikrostepping-Eingänge? Akzeptieren die Pololu-Dinger 3,3V Logikpegel oder brauchen die nicht 5,0V?
Danke Timo für Deine Hinweise. Das ist meine erste Platine und somit noch etwas Neuland für mich. Ich hatte mal 3 Elkos eingezeichnet. Aber die sind ja dann quasi alle parallel geschaltet. Deshalb dachte ich mir, dass einer reichen würde. Und wozu die genau sind ist mir auch nicht ganz klar... Dachte die braucht man wenn man ein Netzteil verwendet. Ich habe vor das ganze mit 12V Blei oder Lipo 3s zu versorgen. Aber wenn Du mir 3 Stk. Empiehlst dann baue ich sie ein. Keine Frage. Auf dem breathboard sind die Schrittmotoren so gelaufen. Ich schaue mal ob ich da noch etwas darüber finde ob die Treiber wirklich 5V brauchen... Manchmal ruckeln die Motoren ein bisschen... dachte es liegt am raspi und unseren code den wir mit javascript ersellt haben... und dass der Raspi es auf mehrer Kerne verteilt.
@mukel Ich konnte nichts gescheiteres finden als RJ45 Dosen zum auflöten... Lankabel habe ich genug... Gibts da sonst was besseres? Es sind Nema 17 mit max 1.6A max. Im Ruhezustand ziehen alle zusammen ca. 375mA und da ich sie für Timelapse brauche machen die auch nur winzige Bewegungen interwallmässig.
Zu den Kondensatoren wurde ja schon was gesagt, je einen so nah wie möglich an den Schrittmotortreiber. Eventuell auch noch je einen Kerko zum Abblocken. RJ45 würde ich nicht benutzen. Der Leitungsquerschnitt der Crimp-Stecker ist mickrig. Ich würde 4-Polige M8 Steckverbinder nehmen. die sind klein, verpolungssicher und können fest verschraubt werden.
Jari Z. schrieb: > Könnte mir bitte vielleicht noch jemnd verraten, nach was ich in KIcad > suchen muss, wenn ich so etwas hier suche? Bei Target gibt es eine Vorlage für einen Raspberry-Aufsteckprint mit richtiger Leiterplattenkontor und 2x20 poligem Stecker. Der Stecker ist dann schon auf der richtigen Leierplattenseite (da passieren die meisten Fehler). Die Signale vom Raspberry sind auch schon vorgegeben,
GEKU schrieb: > ... Leiterplattenkontor ... https://de.wikipedia.org/wiki/Kontor Das meinst du doch bestimmt nicht, zumal das im Zusammenhang mit Leiterplatten mehr als sinnlos erscheint.
zahu schrieb: > @mukel > Ich konnte nichts gescheiteres finden als RJ45 Dosen zum auflöten... Ausprobieren kann man es. LAN-Kabel haben meist AWG23 also ca. 0,3mm² Leiterquerschnitt. Lang sollten die Kabel jedoch nicht sein. Alternativ gehen als Stecker noch GX16. Da brauchst du aber ein Gehäuse. Da gibt es 5 Paar bei Ebay schon für ca. 10€ > Im Ruhezustand ziehen alle zusammen ca. 375mA Woher weißt du das? Wie hast du gemessen? Sind die Treiber auf 1,5A Strom eingestellt? > Timelapse brauche machen die auch nur winzige Bewegungen > interwallmässig. Klingt nicht danach, dass du hohe Dynamik brauchst. Wie hoch sind die Massen die du bewegst. Als Kondensator gehen 100µF Elkos. Ich glaub nicht, dass du auf Low-ESR oder so zurückgreifen musst.
Angehängte Dateien:
Ich versuche es mal mit den RJ45-Steckern... Und sonst besorge ich mir die von dir empfohlenen. Daran sollte es nicht scheitern. Ich habe die 375mA so gemessen, dass ich dem Strom durch mein Multimeter hindurchfliessen liess als alle Motoren in Ruhestellung (blockiert) waren. Die Treiber sind alle so zwischen 0.47V und 0.6V eingestellt. (Gemessen an der Schraube gegen GND. Was die Massen angeht könnten da schon samt Konstruktion bis zu 2kg anfallen, die bewegt werden sollen. Als Versuch habe ich noch einen Arduino UNO an den Raspi angeschlossen und mache so noch ein paar Versuche mit dem Beschleunigen und dem Verlangsamen... Habe mich nun umentschieden, die MS1 bis MS3 pins mit Jumpern zu überbrücken, wenn nötig. So spare ich mir x Leitungen auf der Leiterbahn... Auch habe ich die GPIO Nummerierung geändert dass ich weniger Kreuzungen habe. Die Kondensatoren löte ich natürlich liegend ein. Muss nur noch die Einreihigen 8-Pin Sockel finden um die Schrittmotortreiber drauf zu steken. Sonst haben Jumper und Kondensator keinen Platz darunter und sie sind nicht austauschbar. An der Platine arbeite ich also noch...
Jari Z. schrieb: > Ich habe die 375mA so gemessen, dass ich dem Strom durch mein Multimeter > hindurchfliessen liess als alle Motoren in Ruhestellung (blockiert) > waren. > Die Treiber sind alle so zwischen 0.47V und 0.6V eingestellt. (Gemessen > an der Schraube gegen GND. Das hab ich schon vermutet und ist falsch. Die Treiber funktionieren wie eine Art Step-Down und der Strom der in die Treiber vom Netzteil rein fließt ist wesentlich niedriger als der Strom, der in den Phasenleitungen am Ausgang zum Schrittmotor geht (hier müsste man eine Phase des Schrittmotor mit AC-(RMS)-Strommessung im Betrieb messen). 0.47 - 0.6V an dem Poti entsprechen so 1 bis 1,2A Spulenstrom (hab das Datenblatt es A4988 gerade nicht im Kopf). Dein Wert von 350mA scheint mir dennoch für 3 Motoren sehr niedrig. War das bei 12V? Vermutlich hast du China-A4988 und der eingestellte max. Strom an den Potis stimmt nicht mit dem realen überein. Deswegen mal einen Motor ein paar 1000 Schritte verfahren lassen und die RMS-Strommessung ausprobieren. > Was die Massen angeht könnten da schon samt Konstruktion bis zu 2kg > anfallen, die bewegt werden sollen. Es kommt letztendlich darauf an, wie hoch die Beschleunigung einer Masse in eine Richtung sein soll. Daraus ergibt sich der benötigte Strom aus dem Drehmoment. > Habe mich nun umentschieden, die MS1 bis MS3 pins mit Jumpern zu Gut. Ändern wollen wirst du das nämlich selten. > Die Kondensatoren löte ich natürlich liegend ein. Dann würde ich sie noch weiter von den Jumpern zum Rand der Treiber schieben, da die Gehäuse der meisten 100µF viel höher sind als das in KiCAD als Standardgehäuse angezeigte für 3,5mm Rastermaß. > Muss nur noch die Einreihigen 8-Pin Sockel finden um die > Schrittmotortreiber drauf zu steken. Sonst haben Jumper und Kondensator > keinen Platz darunter und sie sind nicht austauschbar. Schau mal bei Reichelt. Die haben die. Warum hast du da zwei Hohlstecker und zwei Dioden auf der Platine?
Hallo Timo Danke für die wertvollen Antworten. Ist schön jemanden so kompetenten hier anzutreffen :-). Das mit der RMS-Messung übersteigt im Moment mein Know-how. Ja, es sind China-Treiber. Ich habe auch ein paar A8825, diese jedoch noch nicht ausgetestet. (Bei denen sind aber die Motoren Abgönge A1, A2, B1, B2 in einer anderen Reihenfolge. Somit kann ich die Platine nicht für beide Modelle verwenden, denke ich. Entweder oder... Ich meinte, dass ich diese Einreihigen 8-Pin Sockel in KiCAD finden muss, damit mir diese auch schön eingezeichnet werden. Die Hohlstecker sind gedacht, um im Freien Lipo-Akkus, welche ich noch vom Modellbau habe 3S 2500mAh oder auch 12V Blei oder vom Auto anschliessen zu können und diese dann unterbruchsfrei austauschen könnte, bevor sie leer werden. Die Dioden habe ich dazu gedacht, dass der Strom dann in der kurzen Zeit beim Umstecken nicht vom neuen in den alten akku fliessen kann welcher eine geringere Spannung hat. Vielleicht gäbe es da eine elegantere Lösung?
...ja die Messung habe ich ca bei min. 13V an einem Grossen Voltcraft 30A Netzteil angeschlossen durchgeführt.
Mit RMS-Messung meine ich das Multimeter auf AC stellen und dann den Strom messen. Das Multimeter muss aber TrueRMS-fähig sein, damit etwas gescheites messbar ist. Das Multimeter muss dann einfach in eine der 4 Leitungen zum Schrittmotor zwischengeschaltet sein. Bei Stillstand kann man natürlich dann den Strom nicht messen, sondern man muss ihn bei Bewegung des Motors ohne Belastung messen. Nee, das mit den Dioden ist schon ok. Hab den Schaltplan nur noch nicht gesehen gehabt. Die Dioden scheinen zwar maßlos übertrieben überdimensioniert zu sein, aber das schadet ja nicht (I_Fmax = 14.5A). Die Sockelleisten 1x8 gibt es ja in der gleichen Bibliothek in Kicad wie ich oben schon für die 2x20 Sockelleiste für den Raspberry Pi geschrieben hab.
Also ich habe dicke 10A Dioden herum liegen und überlege nun noch kleinere zu bestellen. So 5A habe ich gedacht... - oder welche Grösse würdes Du einbauen? Wie bist denn Du auf die 14.5A gekommen und was bedeutet denn genau "I_Fmax" ? Wäre das der Anlaufstrom eines Motors ca. das zehnfache wie bei Drehstrommotoren? Die Power Jacks sind glaube ich auch bloss mit 500mA angeschrieben. Oder gibt es da noch was robusteres zum auflöten? Ich meine zB. ein HP-Notebook hat auch so eine Art Steckverbindung und ein 65 oder sogar ein 90W Netzteil bei 19V. Das sind dann auch schon mal 4.5A.
zahu schrieb: > Also ich habe dicke 10A Dioden herum liegen und überlege nun noch > kleinere zu bestellen. So 5A habe ich gedacht... - oder welche Grösse > würdes Du einbauen? 3A sollten reichen. Ich nehme an hohe Drehzahlen sind bei deinem Aufbau nicht zu erwarten. Deine Schrittmotoren kenne ich leider nicht (Typbezeichnung/Datenblatt?). Mit dem maximalen Phasenstrom und der Spulenspannung und der maximalen Drehzahl kann man sich ausrechnen, wie hoch die Maximalleistung sein wird, die die Schrittmotoren aufnehmen. Das mal 3 (3 Schrittmotoren) und durch die Versorgungsspannung geteilt ergibt den maximalen DC-Strom der Versorgung. Soviel müssen die Dioden mindestens (dauerhaft) durchlassen. Wenn du die Dioden schon hast, nimm sie halt. ;) Stören ja nicht. Die Rechnung 1,6A (die du oben irgendwo angegeben hast) x 3 (für 3 Schrittmotoren) stimmt nicht. Es ist deutlich weniger (und damit kommen wir wieder zurück auf den Punkt warum der Phasenstrom an den Schrittmotorspulen nicht der dem Strom entspricht, den du oben gemessen hast). > Wie bist denn Du auf die 14.5A gekommen und was bedeutet denn genau > "I_Fmax" ? Das ist der maximalen erlaubte Vorwärtsstrom (bei TC=135˚C) durch die Dioden (laut dem Datenblatt). [I_F (I_Forward)]. Hab deine Dioden gegooglet.
Angehängte Dateien:
-

Motor-Datenblatt.png
140 KB
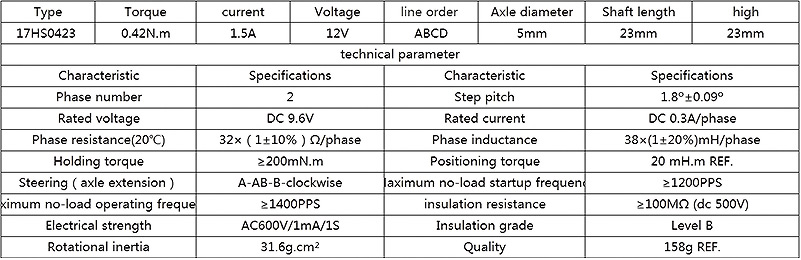
@Timo Du hast noch nach dem Datenblatt der Schrittmotoren gefragt. Ich habe einen Screenshot davon hochgeladen. Wenn ich die Platine fertig habe poste ich sie dann noch einmal... Hättest Du mir dann noch einen Tipp, wo man günsitge Platinen herstellen lassen kann? Deutschland wäre für mich auch möglich, aber von Übersee wirds dann doch recht schnell teuer mit dem Versand.
Jari Z. schrieb: > @Timo > Du hast noch nach dem Datenblatt der Schrittmotoren gefragt. > Ich habe einen Screenshot davon hochgeladen. > Wenn ich die Platine fertig habe poste ich sie dann noch einmal... > Hättest Du mir dann noch einen Tipp, wo man günsitge Platinen herstellen > lassen kann? Deutschland wäre für mich auch möglich, aber von Übersee > wirds dann doch recht schnell teuer mit dem Versand. Also mit dem Datenblatt kann ich irgendwie gar nichts anfangen. Da widersprechen die unteren Angaben den oberen. Lass mich raten: AliExpress? Da wird z.b. unten oben von 0.42Nm Drehmoment gesprochen (passt zu 1.5A) und unten von 200mNm also 0.2Mm. Oben wird von 1.5A (Phasenstrom) und unten von 0.3A DC Phasenstrom gesprochen. Das verwirrt irgendwie alles. Kann sein, dass sich das auf eine andere Ansteuerungsart bezieht (also nicht Konstantstromansteuerung, wie es sonst normal ist). Mit dem Motortyp 17HS0423 findet man noch andere Seiten, aber da gibt es auch verschiedene Angaben zur max. Haltestrom/Wicklungswiderstand/etc. Kannst ja zwischen zwei Phasen auch mal den Spulenwiderstand messen. Allerdings braucht man da ein gescheites Multimeter mit hoher Genauigkeit für Widerstandsmessung und muss auch wissen, wie man so einen kleinen Widerstand messen muss. Platinenfertiger? Deutschland? Günstig? Eher weniger. JLCPCB ist der Günstigste, den ich kenne. 2$ für die 5 Platinen und 6$ Versand (PostLink DE Registered Mail). Das sollte drin sein. Wenn du unsicher bist ob dein Design stimmt, teste lieber alles vorher mit einer Lochrasterplatine. Lohnt sich fast nicht mehr bei den Preisen bei JLCPCB, aber du bist halt schneller. Dauert halt so 2-3 Wochen. Hab aber mit denen sehr positive Erfahrungen damit gemacht. Ach ja: Auf keinen Fall eine andere Versandart wählen, sonst wird es richtig teuer (Kapitalbereitstellungsprovision, etc etc).
Angehängte Dateien:
-

3D-Ansicht-Ausschnitt.png
29 KB -

Design-Roles-Check.png
46 KB
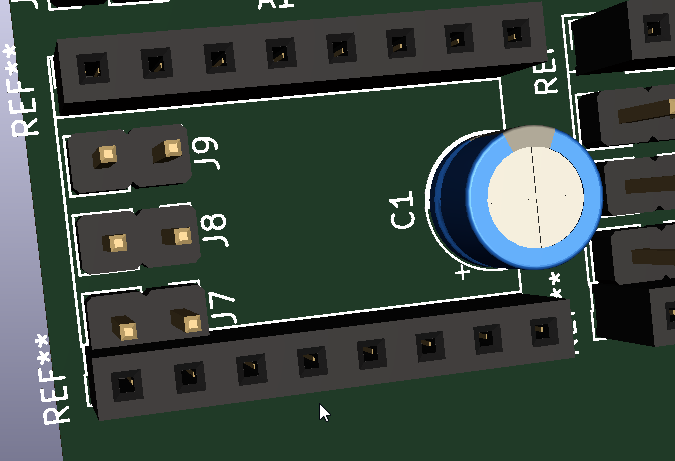
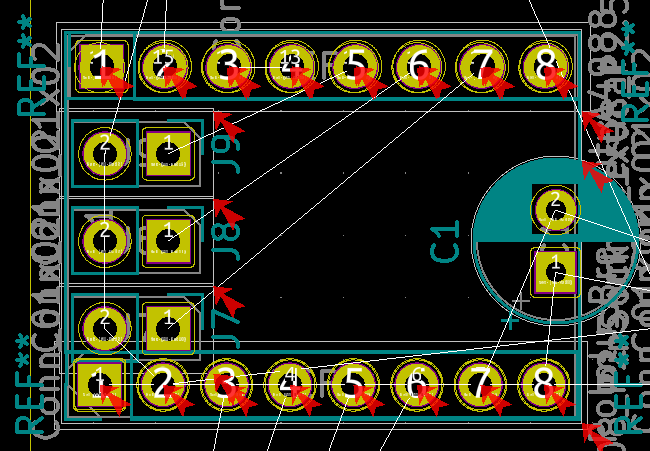
Habe mittlerweile die 1x8 Sockel eingefügt. (In der Pcbnew-Ansicht) Wenn ich nun den Design-Roles-Check mache, dann reklamiert es mir, dass sich die 2-er Pins mit den weissen Rahmen überschneiden und die 8-er Sockel nicht genau auf dem Löchern des Schrittmotortreibers sind. Wie genau muss das sein, resp kriegt man die roten Pfeile überhaupt alle weg, resp. müssen die alles weg sein, dass es funktioniert? Klar - die untersten 2-er Pins müssen noch ein wenig nach oben sonst kann man dann den Jumper nicht draufstecken. Weche Rasterweitern verwendet Ihr beim Positionieren der Bauteile?
Danke für Deine ausführliche Antwort :-) Ja, die Teile sind von AliExpress... Ich sagte mir, warum nicht mal austesten... - habe ja Zeit. Also wenn da die Platinen so günstig sind, dann versuche ich es auf jeden Fall gerne. Nur wäre ich mir vorher trotzdem gerne sicher, dass es dann auch funktioniert und alles verbunden ist, wenn man es bestellt. Bin halt noch etwas unsicher, da es mein erstes Platinen-Projekt ist. Und deshalb die komischen Fragen... Wenn ich an den Raspi noch einen Arduino Uno anschliesse um die Schrittmotoren zu steuern, kann ich dann die Spannung 3.3V und GND zusammenschliessen und die Steuer Pins Step und Direction auch parallel verbinden, sodass ich beide Möglcihkeiten hätte? mal über den Rastpi zu steuern und alternativ testweise über den Arduiono?
Jari Z. schrieb: > Habe mittlerweile die 1x8 Sockel eingefügt. (In der Pcbnew-Ansicht) > Wenn ich nun den Design-Roles-Check mache, dann reklamiert es mir, dass Es sind keine Roles sondern Rules ;) Es geht um die Regeln, die man festlegt, und die nicht verletzt werden dürfen. Also z.b. wie nah eine Leiterbahn an einer anderen sein darf etc. Das legt man selbst fest. Der schlägt bei dir fehl, weil du die Platine der Treiber (A4988) und die Buchsenleisten übereinander positionierst. Du musst die Platine und die Buchsenleisten in einem Footprint zusammenfassen. Das kannst du auch machen, indem du die 3D-Modelle von zwei Buchsenleisten in das 3D-Modell der Pololu-Platine einfügst und richtig positionierst. So hab ich es gemacht. Wenn du 3 separate Bauteile hast (also 2 x 8polige Buchsenleisten und 1x Treiberplatine mit 16 Pins) dann musst du alle im Schaltplan irgendwie verbinden und darfst sie dann aber im Layout auch nicht einfach übereinander platzieren, damit der Design-Rule-Check funktioniert. > Klar - die untersten 2-er Pins müssen noch ein wenig nach oben sonst Genau. Das darf nicht überlappen. > kann man dann den Jumper nicht draufstecken. > Weche Rasterweitern verwendet Ihr beim Positionieren der Bauteile? Jacke wie Hose. Gut sind Teiler von 2.54mm (100mil), da die Pinabstände meist so groß sind. Jari Z. schrieb: > Danke für Deine ausführliche Antwort :-) > Ja, die Teile sind von AliExpress... Ich sagte mir, warum nicht mal > austesten... - habe ja Zeit. > Also wenn da die Platinen so günstig sind, dann versuche ich es auf > jeden Fall gerne. > Nur wäre ich mir vorher trotzdem gerne sicher, dass es dann auch > funktioniert und alles verbunden ist, wenn man es bestellt. > Bin halt noch etwas unsicher, da es mein erstes Platinen-Projekt ist. > Und deshalb die komischen Fragen... Alle Fragen kann man nicht beantworten. Das musst du testen mit einer Platine. Z.b. Lochrasterplatine. Lohnt sich. > Wenn ich an den Raspi noch einen Arduino Uno anschliesse um die > Schrittmotoren zu steuern, kann ich dann die Spannung 3.3V und GND > zusammenschliessen Warum 3.3V zusammenschließen? Das ist völlig egal. > und die Steuer Pins Step und Direction auch parallel > verbinden, sodass ich beide Möglichkeiten hätte? mal über den Raspi zu > steuern und alternativ testweise über den Arduiono? Nein, da der Arduino Uno mit 5V Logikpegeln arbeitet und deine 3.3V Raspi-IOs damit zerstört. Hier steht übrigens viel Wissenswertes über deine Treiber: https://www.pololu.com/product/1182 Sind die Treiber von dir auch Aliexpress oder original von Pololu? Hab die Erfahrung gemacht, dass die DRV8825 von Aliexpres zwar gehen, ich aber nicht auf den eingestellten Phasenstrom (laut Datenblattfomel) komme. War für mich nicht schlimm, also hab ich keine Ahnung ob das bei den originalen auch so ist. Z.b. dass sie mit 3.3V Logikpegel funktionieren und der Step und Dir-Eingang floatet.Außerdem steht da auch welche Pins noch wie verbunden werden müssen. Wie sieht denn der aktuelle Schaltplan aus? Kannst mir mal das KiCad-Projekt schicken (PN mit Link).
Angehängte Dateien:
-

Focus-Shutter.png
7,8 KB
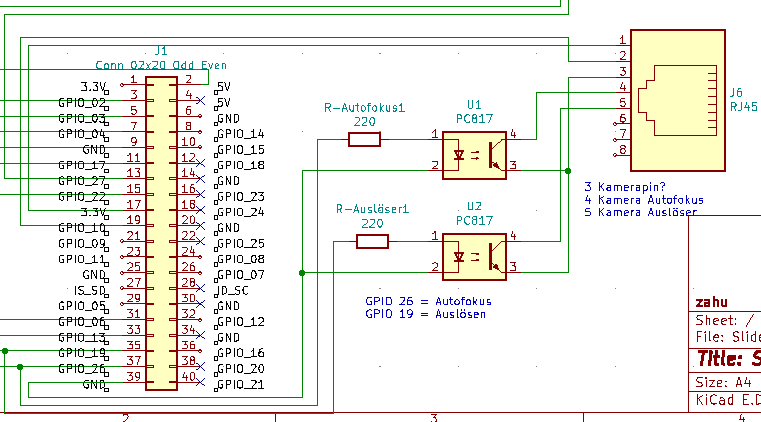
Ich habe nun die Platine so weit gezeichnet - hoffe dass das ganze auch funktioniert. Gleichzeitig möchte ich auch einen auslösemechanismus für die Kamera draufbauen. Dazu habe ich verschiedenste Anleitungen durchstöbert und habe es nun folgendermassen gelöst. Da die Kamera 3 Pins mit dem Auslöser und Autofocus hat, habe ich mal zwei Optokoppler CP817 vorgesehen. So wie ich die Anleitungen verstanden habe, brauchen die LEDs darin 1V, 10mA. Wenn ich nun vom Arduino oder Raspi via GPIO ein High auf den Optokoppler geben will, habe ich 3.3V somit R=U_diff/I / 2.3V/0.01=220Ohm Somit würde ich eingangs bei jedem Optokoppler einen Widerstand von 220Ohm zwischen den GPIO schalten. Auf der Ausgangsseite des Optokopplers brauche ich so wie ich es gelesen habe keinen Widerstand einzubauen, da der in der Kamera selbst sein soll... Ist das so korrekt?
Timo N. schrieb: > Phasenleitungen am Ausgang zum Schrittmotor geht (hier müsste man eine > Phase des Schrittmotor mit AC-(RMS)-Strommessung im Betrieb messen). Warum? Der A4988 misst den Strom der Motorwicklung über einen Shunt, an dem man allerbest bei stehendem Motor - ganz ohne RMS-Zauber - den Spannungsabfall messen kann. Anhand des Widerstandswerts lässt sich daraus mit dem Ohm'schen Gesetz ganz einfach der Strom ausrechnen.
Jari Z. schrieb: > hoffe dass das ganze auch funktioniert. Durch deine Optokoppler fließen fast 10mA, der Raspberry Pi verträgt aber nur 3mA.
Vielen Dank für die Info. Dann muss ich das noch mal abändern... Und wie kann ich dann die Optokoppler mit dem Raspi ansteuern, wenn die LED darin min. 5mA und max 20mA benötigt bei 1V?
Jari Z. schrieb: > Vielen Dank für die Info. > Dann muss ich das noch mal abändern... > Und wie kann ich dann die Optokoppler mit dem Raspi ansteuern, wenn die > LED darin min. 5mA und max 20mA benötigt bei 1V? Die LED benötigt gar nichts, wo hast du diese Info her? Schließe mal eine handelsübliche 1W LED an einen 10kΩ Widerstand an und staune, wie hell sie leuchtet. Interessanter ist die Frage, wie viel Strom denn das Gerät benötigt, dass du an den Optokoppler anschließen willst und wie hoch das Übersetzungsverhältnis (CTR) des Optokopplers ist.
Diese Info habe ich hier gelesen: https://forum.lrtimelapse.com/Thread-optocoupler-an-stelle-npn-transistor-2n2222--9616 ziemlich unten... Die Stromstärke ist mir leider nicht bekannt. Das müsste ich sonst mal an der Kamera messen, wenn ich die beiden Pins mit dem Ampere-Meter verbinde.
Angehängte Dateien:
-

Steckerbelegung_Sony.png
250 KB
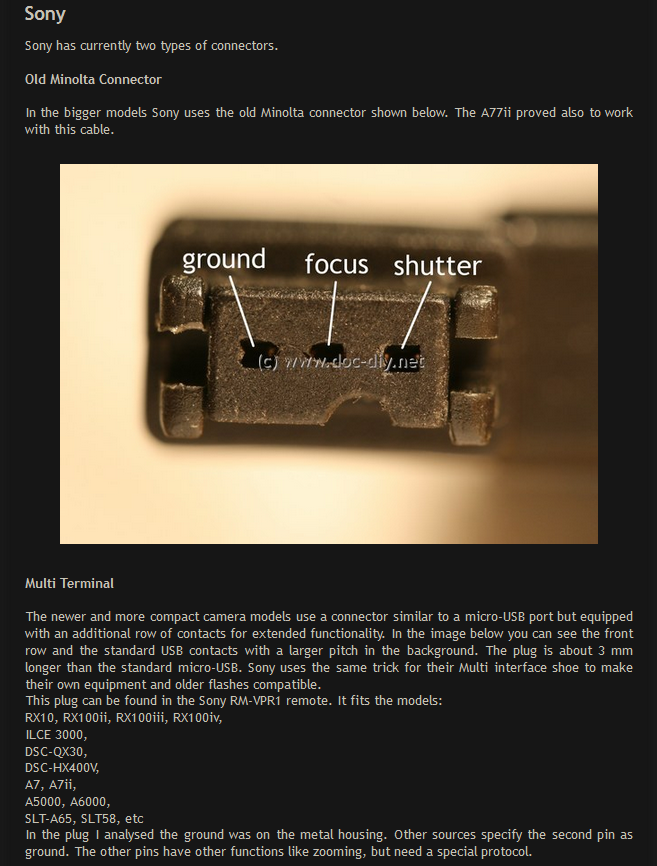
Hier habe ich die Steckerbelegung für alle möglichen Kameras gefunden. In meinem Fall jetzt eine Sony. Da muss man man den Ground-Kontat mit dem Focus und Shutter verbinden so wie ich es gelesen habe. Und dafür wollte ich diesen Optokoppler einsetzen. Grosse Ströme sollten da nicht fliessen.
Wolfgang schrieb: > Warum? > > Der A4988 misst den Strom der Motorwicklung über einen Shunt, an dem man > allerbest bei stehendem Motor - ganz ohne RMS-Zauber - den > Spannungsabfall messen kann. Anhand des Widerstandswerts lässt sich > daraus mit dem Ohm'schen Gesetz ganz einfach der Strom ausrechnen. Weil man dann genau die Stellung erwischen muss, bei der eine Phase seinen Scheitelwert hat. Schwer den Schrittmotor bei Mikrostepping in diese Position zu bringen. @Jari: Jetzt hab ich dir den Schaltplan so schön entschlackt und du verwendest den gar nicht...
@Timo Ou, da habe ich wohl was verpasst.. Ich schaue es gleich an... sorry
@Timo Ich habe nicht bemerkt, dass Du mir was hochgeladen hast. Das sieht ja viel übersichtlicher aus! :-) Wie ich sehe, verbindet man in der Praxis alle GNDs, und 3V-Pins miteinander?
Jari Z. schrieb: > Wie ich sehe, verbindet man in der Praxis alle GNDs, und 3V-Pins > miteinander? Ja, ind zwar sternförmig,, wenn man keine Lust auf fiese Überraschungen hat.
Stefanus F. schrieb: > Jari Z. schrieb: >> Wie ich sehe, verbindet man in der Praxis alle GNDs, und 3V-Pins >> miteinander? > > Ja, ind zwar sternförmig,, wenn man keine Lust auf fiese Überraschungen > hat. Nee, ging da nur um den Schaltplan, nicht um das Layout. Im Schaltplan hatte er wirklich alle GND und 3,3V mit Wire miteinander verbunden und nicht einfach die Power/GND Flags an die Eingänge der Komponenten gehängt. Sah dadurch alles etwas unübersichtlich aus. Stefanus, wie kommst du auf die 3mA pro GPIO vom RaspberryPi? Ich finde nur Angaben bis 50mA für alle GPIOs zusammen. 3mA wären schon wenig. Weißt du außerdem wie das mit der CTR-Angabe im Datenblatt gedacht ist? Da steht z.b. bei 5mA 50% bis 600%. Ist das eine Bauteiltoleranz/varianz und es wird nur ein Wert innerhalb des Bereichs garantiert? In Figure 6 vom PC817 Datenblatt ist ein Diagramm und dort ist ca. 470% bei 5mA abzulesen. Ich hab noch nicht so viel Erfahrungen mit Optokopplern und würde von der Vorgehensweise her erst mal mit dem Strom am Ausgang und über den CTR den benötigten Strom durch die LED berechnen. Die Erklärungen im Artikel hier auf Miktrocontroller.net werfen bei mir Fragen auf. Wie ist da die Vorgehensweise?
Timo N. schrieb: > Stefanus, wie kommst du auf die 3mA pro GPIO vom RaspberryPi? Habe ich irgendwo mal gelesen. Womöglich hat da jemand die 50mA durch die Anzahl der I/O Pins dividiert. Leider habe ich nur ein Datenblatt gefunden in dem dazu nichts offizielles drin steht. Anscheinend ist der maximale Ausgangsstrom von 2-16mA konfigurierbar. Steht zumindest dort: http://www.mosaic-industries.com/embedded-systems/microcontroller-projects/raspberry-pi/gpio-pin-electrical-specifications
Hallo zusammen Ich habe da auch noch so was ähnliches gefunden wie Stefanus: https://raspberrypi.stackexchange.com/questions/9298/what-is-the-maximum-current-the-gpio-pins-can-output Ein einzelner GPIO kann bis 16mA belastet werden und die Summe aller GPIOs sollte 50mA nicht übersteigen. -> Somit sollte man den Optokoppler PC817 an einem Raspi-GPIO (3,3V)am eingang nach der Formel (3,3-1)/220_Ohm = 0.01045A betreiben können. Wenn man denselben bei 5V mit 10mA an einem Arduino anschliessen möchte, wäre ein Widerstand von (5-1)/0.01=400 Ohm zu nehmen.
Wobei sowohl Optokoppler als auch AVR mehr Strom vetragen, so dass man es auch dort bei den 220 Ohm belassen kann.
Angehängte Dateien:
-

Shutter_auf_LED.png
14 KB
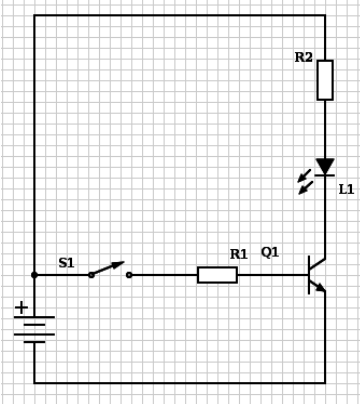
Nun habe ich nur noch eine Sache: Ich möchte so lange wie die Kamera auslöst ein Signal auf einen GPIO des Raspis bekommen. In diesem Beitrag habe ich obiges Schema gefunden. Beitrag "LED Trigger ausgelöst von Blitzschuh" Da wurde gewünscht, dass eine LED so lange leuchtet, wie ausgelöst wird um einen Slave-Blitz zu betreiben. Ist im Prinzip eigentlich sehr ähnlich. Nur wie kann ich dies auf meine Anforderung ableiten? Als Spannungsquelle das Plus 3.3V des Raspis nehmen, LED L1 gegen einen dritten PC817 austauschen und den den Widerstand von R2 auf 220 Ohm tauschen. Ausgangsseitig des PC817 könnte ich dann 3.3V auf einen GPIO des Raspis leiten? Irgendwie müsste es doch auch einfacher gehen...
Jari Z. schrieb: > Gleichzeitig möchte ich auch einen auslösemechanismus für die Kamera > draufbauen. Jari Z. schrieb: > Das müsste ich sonst mal an der Kamera messen, wenn ich die beiden Pins > mit dem Ampere-Meter verbinde. Das Messen könntest du dir evtl. sparen, wenn du den Kameratyp nicht ganz so geheim hälst. Vielleicht bist du nicht der Erste, der einen elektrischen Auslöser dafür aufbaut.
Geheim behalten möchte ich natürlich nichts... Ich habe eine Sony A99 und eine Nikon D5300. Die Sony brauche ich vor allem für Panos (Da kommt dann der bewegliche Teil zum drehen und schwenken mit 2 Schrittmotoren nicht auf den Schlitten sondern direkt auf das Stativ) und für die Timelapses dachte ich mit nehme ich die D5300 - die ist etwas weniger schade wegen den vielen Bldern die man da machen muss. Ich dachte mir, dass wenn ich schon so eine Steuerung mache, sie dann auch mit allen möglichen neueren Kameras zB der Nikon serie (D750 - D810) oder auch Canon 5D.. kompatibel sein könnte.
Um den Auslöser zu bauen habe ich mir das hier als Idee heran gezogen... https://gwegner.de/know-how/lrtimelapse-pro-timer-free/ Hier macht er es vor allem mit einem Transistor - oder auch mit der Option einen Optokoppler einsetzen zu können. Allerdings wäre dann im Falle mit dem Optokoppler der Widerstand nicht angegeben.
Ich hoffe, dass noch jemand eine gute Lösung hat für meine Auslöse-Signalisation auf einen GPIO.. Dann könnte ich die Platine in Fabrikation geben :-)
Jari Z. schrieb: > Ich versuche es mal mit den RJ45-Steckern... > Und sonst besorge ich mir die von dir empfohlenen. Daran sollte es nicht > scheitern. Solange Du die Stecker nich im laufenden Betrieb abziehst sollte es mit RJ45 gehen. Es gibt ja auch Geräte mit Power over Ethernet und das ist derzeit dür 600mA konzipiert. An 1A arbeit man (https://www.telegaertner.com/de/info/themenspecials/erhoehte-anforderungen-die-rj45-technik/). Das Problem ist weniger der Kabelquerschnitt, sondern die Belastung der Kontakte durch Arreißfunken beim Ausstecken. Der alte Standard (für PoE) sieht ca. 15W der neue 25W vor. Es hängt hauptsächlich von der Kabellänge und wieviel Spannungsverlust Du zulassen möchtest. Hier https://elektroinstallation-ratgeber.de/kabelquerschnitt-berechnen/ kannste nachrechnen ob Netzwerkkabel mit ca. 0,3qmm Querschnitt für Deine Zwecke ausreichend ist.
Jari Z. schrieb: > Um den Auslöser zu bauen habe ich mir das hier als Idee heran gezogen... > https://gwegner.de/know-how/lrtimelapse-pro-timer-free/ Für den Auslöser einen 2N2222 heran zu ziehen, scheint mir doch etwas überzogen. Mit der Nikon D5300 habe ich leider keine Erfahrung, aber eine Canon DSLR lässt sich direkt mit einem Optokoppler (bei mir IL74 aus der Grabbelkiste) ansteuern.
Danke Euch für die Antworten. :-) Und wie kann ich jetzt noch das Auslöen und die Auslösedauer der Kamera auf eiem GPIO-Pin signalisieren? Die meisten vernünftigen Kameras haben einen Blitzschuh - einige sogar noch eine X-Buchse für Externe Blitze. Der mittlere Kontakt, wo die Spannung vom Blitz anliegt wird während dem Auslösen mit der Masse der Kamera verbunden. Wie müsste dann die Schaltung aussehen? Könnte mir hier noch jemand weiter helfen? Vielleicht sehe ich den Wald vor lauter Bäumen nicht und stelle es mir bloss unnötig komliziert vor. Besten Dank zum voraus für Eure Tipps... ;-)
Falls deine Kamera einen integrierten Blitz hat: Hast du erwägt, einen Tochterblitz zu bauen? Das hätte den Charme, dass du nicht an die Elektronik der Kamera heran gehen musst.
Ich brauche den genauen auslöseprozess abzugreifen bei panorama Fotografie im HDR Modus bei Langzeitbelichtungen. ZB. In Kirchen kürzeste Belichtungszeit 2s das fünfte Bild 30sec. Nach jedem Bild, das erstellt wird vlt. 5 sec. Verarbeiten lassen zum Speichern und so dann das nächste Bild. Nach dem letzten längsten dann die Kamera zur nöchsten Position bewegen. Ich will ja nicht einen generellen Auslöseinterwall von 40 sec. Auch für die 2sec. belichteten Bilder. Da würde dann so ein Pano 1.5h dauern mit 3 Reihen a 8 Positionen bei 5 Bildern (HDR) pro position. Ich fotografiere nie mit Blitz.. weder im Pano modus noch im Timelapse modus. Aber auf der blitzbuchse kann man trotzden das auslösesignal anzapfen. So lange der Verschluss offen ist, so lange ist der Kontakt geschlossen.(mittlerer Kontakt vom Blitzschuh gegen Kamere Masse)
Ich würde Grundsätzlich die Finger von der Kamera, bzw. deren Innenleben, lassen. Einen billigen Fernauslöser (ein Draht mit Taster) angezapft und Du hast das Signal für den Auslöseprozess. Selbst wenn Du dieses Prozedere für verschiedene Kameras durchziehen musst (einer für Alle geht wahrscheinlich nicht - da die zufällig alle, verschiedene Anschlüsse haben), wirst Du hierbei nicht gleich arm. Am meist genormten Blitzanschluss bekommst Du Dein Blitzsignal zur rechten Zeit. Was Du jetzt damit machst ist eine andere Sache: Herz was willst Du mehr?
Wenn ich die Platine nun soweit habe, sollte man ja in meinem Fall nocht die Leiterbahndicke dimensionieren. Wenn meine Nema17 Schrittmotoren pro Phase 1,5A ziehen können, dann sollte ich doch bestimmt auch die Leiterbahnen ca. 0,6mm beit machen, oder nicht? Denn mit 0.25mm kommt das wohl nicht so gut... Kann man denn die gewünschte Breite bereits im Schema angeben, damit diese dann von PCBnew dem FreeRouter mitgegeben werden kann, damit der FreeRouter diese breiten auch berücksichtigt? Oder macht ihr dann alles erst am Ende - manuell über die Eigenschaften dann die Breite anpassen? In den Roles kann man ja eigene Dicken erstellen... Aber wenn ich der 24V-Leitung eine gröbere Dicke zuweise, wie soll Kicad resp. der FreeRouter wissen, dass die Masse auch so sick sein soll für die Speisung der Motoren? Oder kann man auch verschiedene Massen definieren?
Jari Z. schrieb: > Wenn meine Nema17 Schrittmotoren pro Phase 1,5A ziehen können, dann > sollte ich doch bestimmt auch die Leiterbahnen ca. 0,6mm beit machen, > oder nicht? Eine einfache Regel: mach Leiterbahnen, die nennenswerten Strom führen, so breit wie möglich. > wie soll Kicad resp. der FreeRouter wissen, dass die Masse auch so sick > sein soll für die Speisung der Motoren? Du bist der Designer. Du musst das wissen und entsprechend korrigieren. > der FreeRouter Eine Motoransteuerung mit einem Autorouter? Ich wünsche dir ganz viel Glück bei diesem Vorhaben! Du brauchst es... Oder andersrum: natürlich musst du selber erst mal die kritischen stromführenden Leitungen und die Versorgung(!) von Hand optimal verlegen. Den Rest, die paar Signalleitungen, könnte dann der Autorouter verlegen, aber du musst kontrollieren, ob das Ergebnis passt. Denn es ist deine Platine, die hinterher nicht funktioniert. Und da nützt es leider gar nichts, wenn du zu Recht entrüstet sagen kannst: "Der Autorouter hats verbockt!"
Danke für Deine Antwort Lothar. Ich habe herausgefunden, dass wenn ich auf der Unterseite eine Kupferschicht mache und dieser GND zuweise, dass ich das Problem mit der Leiterbahndicke auf der Masse gelöst habe - denn dicker kann es ja nicht sein. Und so muss dann FreeRouter auch nur noch die Signal-Leitungen und die stromführenden Leitungen routen. So habe ich dann schon viel weniger Kreuzungen und mehr Platz um sie dann nachträglich auf 1mm oder so zu verbreitern. Dass man dem FreeReouter keine Schuld geben kann ist schon klar.. ;-) Deshlab versuche ich ja bestmöglich einzugreifen. Ich wollte nur wissen, ob man dem FreeRouter von Anfang an so viele Infos wie möglich übergeben kann, damit er schon auf Anhieb die stromführenden Leitungen etwas Dicker macht.
Jari Z. schrieb: > wenn ich auf der Unterseite eine Kupferschicht mache und dieser GND > zuweise, dass ich das Problem mit der Leiterbahndicke auf der Masse > gelöst habe Das schon. Aber dann hast du nicht mehr (oder nur eingeschränkt) in der Hand, wo die Leistungsströme fließen. Und die sollten sich eben nicht "zwischen" den Signalleitungen "tummeln" und diese u.U. beeinflussen oder stören...
Ja das tönt noch einleuchtend.. Kann man denn die Minus-Leiter von unten zuerst ziehen, diecker machen und dann blockieren, damit sie dann nicht mit der ganzen GND-Kupferfläche verbunden werden? Denn wenn ich zuerst dicke Minus-Leitungen von unten ziehe und anschliessend die Kupferfläche auf die untere Seite lege, macht es mit keine Ausspahrungen um die dicken Minus-Leiter. Wie könnte man das hin bekommen?
Angehängte Dateien:
-

A4988-Anschluss.png
2,1 KB
@Timo - Frage zur Spannung an den StepperMotor-Treibern Du hast mir das Schema so angepasst, dass Enable auf GND gezogen wird und Reset sowie Sleep auf 3,3V. Ich habe das noch mal auf dem BreadBoard ausgetestet und wenn ich nun Enable auf GND ziehe, dann sind die Motoren nicht mehr blockiert, wenn sie nicht drehen. Also Darf ich Enable nicht auf Minus ziehen. - Die sollen bock still stehen. Und wenn ich alles was 3,3V auf 5V anschliesse, laufen die Motoren irgendwie ruhiger, aber die Treiber wie auch die Motoren werden dann so warm, dass man sie nicht länger als 5sec anfassen kann. Das waren sie mit 3,3V - Ansteuerung nicht. Sollte man diese nun mt 5V betreiben und ist es normal dass die so warm werden? Ich hätte da auch noch die DRV8825-Treiber. Würdet Ihr lieber diese einsetzen? Haben die noch einen weiteren Vorteil als dass sie noch 32-stel Stepps machen können gegenüber 16-tel wie die A4988? Das einzige was man da anpassen müsste, sind die Motorausgänge vertauschen...
Angehängte Dateien:
-

PinHeader-XH-254mm.png
63 KB
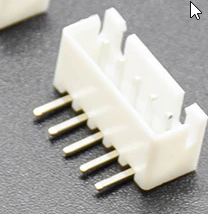
Hallo nochmal Ich suche verzweifelt nach einem FootPrint für dieses Bauteil in KiCad. Kann mir jemand sagen, wie ich dieses Finde, oder wo ich dieses herunter laden kann? Ist anstelle der schwachen RJ45 Stecker um die Nema17 direkt auf die Platine anzustecken. Besten Dank & einen schönen Sonntag ;-)
Hallo Jari, da ich keine Mail mehr von dir bekommen habe und den Thread hier bisher nicht beobachte, dachte ich, dass Thema hat sich für dich erledigt. Hab nun doch interessehalber nochmal nachgeschaut und gesehen, dass du wieder was gepostet hast. Jari Z. schrieb: > Ich habe das noch mal auf dem BreadBoard ausgetestet und wenn ich nun > Enable auf GND ziehe, dann sind die Motoren nicht mehr blockiert, wenn > sie nicht drehen. Also Darf ich Enable nicht auf Minus ziehen. - Die > sollen bock still stehen. Das kann nicht sein. Der Querstrich über "ENABLE" bedeutet, dass der Treiber Active-Low ist. Das heißt, dass er nur funktioniert, wenn dieser Eingang auf GND gezogen wird (auf der Treiberplatine über einen Pull-Down Widerstand oder von außen) > Und wenn ich alles was 3,3V auf 5V anschliesse, laufen die Motoren > irgendwie ruhiger, aber die Treiber wie auch die Motoren werden dann so > warm, dass man sie nicht länger als 5sec anfassen kann. Das waren sie > mit 3,3V - Ansteuerung nicht. Das ist ja auch kein Wunder, da der maximale Phasenstrom abhängig von der Versorgungsspannung über das Poti eingestellt wird. Bei 3,3V am Poti ist am Eingang V_Ref des Schrittmotortreiber bei gleicher Poti-Stellung eine 3,3V/5.0V so hohe Spannung und damit wird laut der Formel aus dem Datenblatt auch ein höherer Phasenstrom vorgegeben. Bei 5.0V muss man also das Poti neu einstellen. > Sollte man diese nun mt 5V betreiben und ist es normal dass die so warm > werden? Bei zu hoch eingestelltem Phasenstrom ja. > Ich hätte da auch noch die DRV8825-Treiber. > Würdet Ihr lieber diese einsetzen? Haben die noch einen weiteren Vorteil > als dass sie noch 32-stel Stepps machen können gegenüber 16-tel wie die > A4988 Können etwas höherere Phasentröme leiten. Insgesamt wären Trinamic Treiber TMC2208 oder TMC2209 wohl am Besten geeignet, da sie viel ruhiger laufen als die A4988. > Das einzige was man da anpassen müsste, sind die Motorausgänge > vertauschen... Bin mir nicht sicher, aber ich glaub das müsste soweit pinkompatibel sein, dass du höchstens in der Software die Richtung anpassen musst. Die beiden Spulenanschlüsse des Schrittmotors liegen bei beiden Treibern nebeneinander.
Jari Z. schrieb: > Hallo nochmal > Ich suche verzweifelt nach einem FootPrint für dieses Bauteil in KiCad. > Kann mir jemand sagen, wie ich dieses Finde, oder wo ich dieses herunter > laden kann? > Ist anstelle der schwachen RJ45 Stecker um die Nema17 direkt auf die > Platine anzustecken. > Besten Dank & einen schönen Sonntag ;-) Sieht aus wie ein JST XH Connector. Die sollten einen Pitch von 2.5mm haben. In deinem Bild mit dem Dateinamen "PinHeader-XH-254mm.png" könnte man denken, dass der Suffix "254mm" auf einen Pitch von 2.54mm verweist. Das ist mir aber nicht bekannt, dass der Stecker mit so einem Pitch existiert. Ich denke es bedeutet 2.5mm 4-polig. Wie auch immer, in KiCAD findest du die Stecker unter "Connector_JST". http://www.jst-mfg.com/product/pdf/eng/eXH.pdf?5d1ad47a5dfab
Danke Euch beiden für Eure Antworten... Werde es nochmal ausmessen und testen. Auch mache ich mich nochmals auf die Suche der Connectoren...
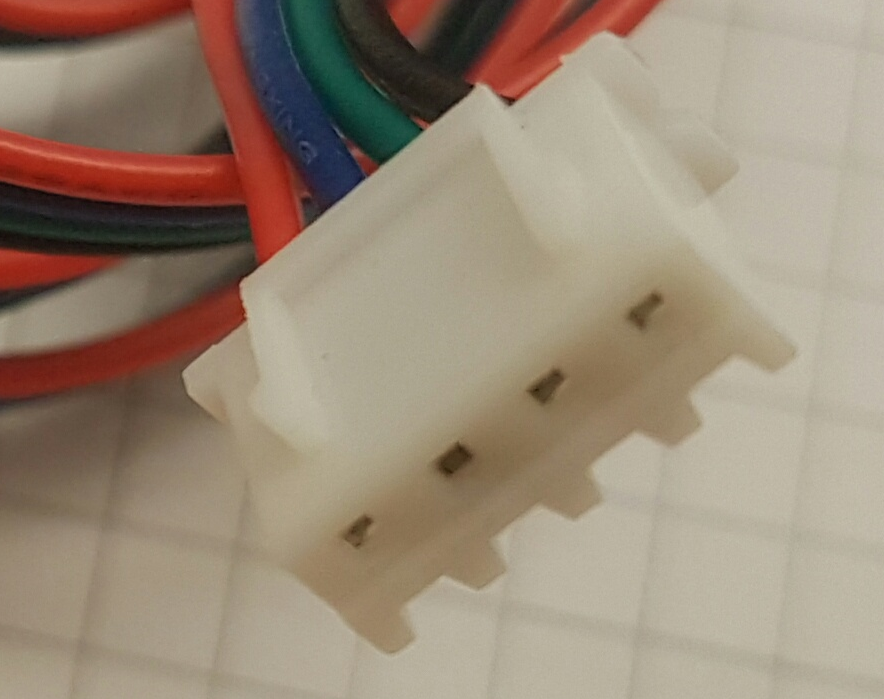
Angehängte Dateien:
-

Motorstecker.png
480 KB
{kind=link}
Also der "Connector_JST" scheint es nicht zu sein. Ich suche den Connector, an welchen man die (glaube ich DuPont) Stecker der Steppermotoren anschliessen kann. Ich dachte mir, dass dieser PinHeader-XH am besten dazu passen würde. Ich habe mal ein Foto von meinem Motoren-Stecker gemacht.
Jari Z. schrieb: > Also der "Connector_JST" scheint es nicht zu sein. > Ich suche den Connector, an welchen man die (glaube ich DuPont) Stecker > der Steppermotoren anschliessen kann. > Ich dachte mir, dass dieser PinHeader-XH am besten dazu passen würde. > Ich habe mal ein Foto von meinem Motoren-Stecker gemacht. Connector_JST ist nur die Bibliothek mit allen Steckern der Firma JST. Der Stecker selbst wäre dann das Modell XH. Warum scheint es der nicht zu sein? Die von dir gezeigte Buchse scheint eine zu sein. Wenn du Dupont-Stecker suchst, dann ist das was ganz anderes. Die brauchen auf der Platine eben Stiftleisten mit 2,54mm Pitch. Gibt dir dein Hersteller/Verkäufer keine Informationen über den Stecker (exakte Typbezeichnung)? Pinheader-XH sagt mir nichts.
Wolfgang schrieb: > GEKU schrieb: >> ... Leiterplattenkontor ... > https://de.wikipedia.org/wiki/Kontor > > Das meinst du doch bestimmt nicht, zumal das im Zusammenhang mit > Leiterplatten mehr als sinnlos erscheint Eigentlich war Kontur gemeint, was auch Umrisslinie bedeutet.
Bitte melde dich an um einen Beitrag zu schreiben. Anmeldung ist kostenlos und dauert nur eine Minute.
Bestehender Account
Schon ein Account bei Google/GoogleMail? Keine Anmeldung erforderlich!
Mit Google-Account einloggen
Mit Google-Account einloggen
Noch kein Account? Hier anmelden.